 電子發(fā)燒友App
電子發(fā)燒友App


電機(jī)至少占美國能源消耗的一半。為應(yīng)用選擇正確的控制方法可使電機(jī)最有效地運(yùn)行,同時最大化扭矩和整體性能。高效運(yùn)行的電機(jī)也可以減少能源消耗,減少停機(jī)時間,從而節(jié)省更多成本。
對于由變頻器(VFD)控制的電機(jī),大部分使用的控制方法決定了電機(jī)在應(yīng)用中的效率和性能。一旦工程師和設(shè)計(jì)人員了解每種控制方法的優(yōu)點(diǎn),缺點(diǎn)和特定規(guī)格,為任何應(yīng)用選擇合適的控制方法都變得簡單。
變頻技術(shù)是應(yīng)交流電機(jī)無級調(diào)速的需要而誕生的。20世紀(jì)60年代以后,電力電子器件經(jīng)歷了SCR(晶閘管)、GTO(門極可關(guān)斷晶閘管)、BJT(雙極型功率晶體管)、MOSFET(金屬氧化物場效應(yīng)管)、SIT(靜電感應(yīng)晶體管)、SITH(靜電感應(yīng)晶閘管)、MGT(MOS控制晶體管)、MCT(MOS控制晶閘管)、IGBT(絕緣柵雙極型晶體管)、HVIGBT(耐高壓絕緣柵雙極型晶閘管)的發(fā)展過程,器件的更新促進(jìn)了電力電子變換技術(shù)的不斷發(fā)展。20世紀(jì)70年代開始,脈寬調(diào)制變壓變頻(PWM-VVVF)調(diào)速研究引起了人們的高度重視。20世紀(jì)80年代,作為變頻技術(shù)核心的PWM模式優(yōu)化問題吸引著人們的濃厚興趣,并得出諸多優(yōu)化模式,其中以鞍形波PWM模式效果最佳。20世紀(jì)80年代后半期開始,美、日、德、英等發(fā)達(dá)國家的VVVF變頻器已投入市場并獲得了廣泛應(yīng)用。?
變頻器控制方式的合理選用?
控制方式是決定變頻器使用性能的關(guān)鍵所在。目前市場上低壓通用變頻器品牌很多,包括歐、美、日及國產(chǎn)的共約50多種。選用變頻器時不要認(rèn)為檔次越高越好,而要按負(fù)載的特性,以滿足使用要求為準(zhǔn),以便做到量才使用、經(jīng)濟(jì)實(shí)惠。
如何為變頻器選擇合適的控制方法
控制方法
業(yè)內(nèi)許多人認(rèn)為控制方法是控制VFD的排序方法,如2線和3線設(shè)置。這種2線和3線設(shè)置確定VFD的輸入控制端子是否與保持的觸點(diǎn)或瞬時按鈕接口以啟動和停止驅(qū)動器。本文所關(guān)注的控制方法可能更準(zhǔn)確地稱為運(yùn)動控制方法。他們確定VFD如何控制電機(jī)。
連接到VFD的感應(yīng)電動機(jī)有四種主要類型的電動機(jī)控制方法:V / f(伏特/赫茲),帶編碼器的V / f,開環(huán)矢量和閉環(huán)矢量。這些方法都使用脈沖寬度調(diào)制(PWM),這種技術(shù)通過調(diào)制脈沖持續(xù)時間來改變固定信號的寬度,以產(chǎn)生可變模擬信號。
通過使用VFD直流母線電容器的固定直流電壓,將PWM應(yīng)用于VFD。輸出側(cè)的一組絕緣柵雙極晶體管(IGBT)快速打開和關(guān)閉以產(chǎn)生脈沖。改變輸出電壓波形中的輸出脈沖寬度可以構(gòu)建模擬的AC正弦波。即使驅(qū)動器的輸出電壓波形由DC脈沖引起的方波組成,電流波形也是正弦波,因?yàn)殡姍C(jī)是電感式的。所有電機(jī)控制方法都依靠PWM電壓波形來控制電機(jī)。控制方法之間的區(qū)別在于它們?nèi)绾卧谌魏谓o定時刻計(jì)算電機(jī)的電壓需求。
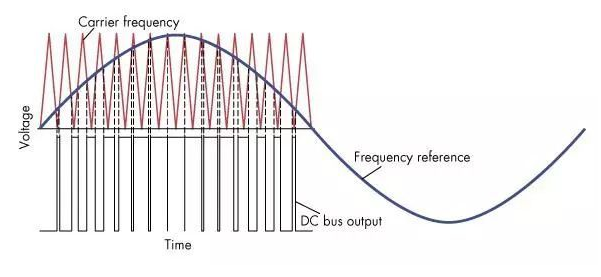
通常使用脈沖寬度調(diào)制來控制AC電動機(jī)。在此過程中,載波頻率(以紅色顯示)是VFD輸出晶體管門控或調(diào)諧的速率。載波頻率通常可以是2至15kHz。頻率參考(藍(lán)色)是發(fā)送到電機(jī)的速度信號,通常為0到60 Hz。當(dāng)覆蓋兩個波形時,工程師可以使用這兩條曲線之間的交點(diǎn)來調(diào)制輸出直流脈沖(黑色),以提供所需的速度控制。
V / f控制
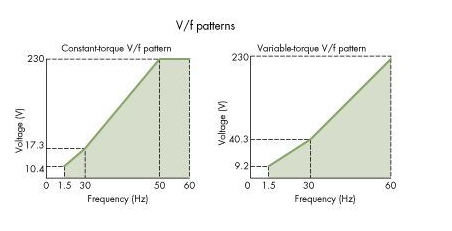
不同的V / f模式使VFD可以控制多個不同的應(yīng)用,同時保持每個應(yīng)用的最佳性能。恒定扭矩模式是直線,這導(dǎo)致恒定的V / f比,在整個速度范圍內(nèi)提供恒定的電動機(jī)扭矩。可變轉(zhuǎn)矩模式在較低速度下具有較低的電壓以防止電動機(jī)飽和。
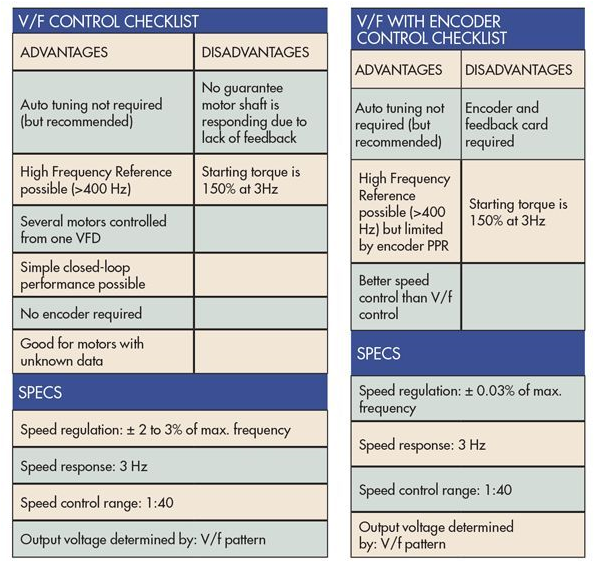
伏特/赫茲,通常稱為V / f,是最簡單的電機(jī)控制方法。它經(jīng)常被使用,因?yàn)樗哂小凹床寮从谩钡暮唵涡砸约膀?qū)動器所需的電機(jī)數(shù)據(jù)量。它不需要編碼器,也不需要將VFD調(diào)諧到電機(jī)(但推薦)。這意味著更低的成本和更少的布線。V / f控制通常在需要運(yùn)行時使用,可能超過1,000 Hz,因此通常用于機(jī)床和主軸應(yīng)用。
V / f是唯一允許多個電機(jī)從單個VFD運(yùn)行的控制方法。在這種情況下,所有電機(jī)同時啟動和停止,并遵循相同的速度參考。
V / f有一些限制。例如,使用V / f時,無法保證電機(jī)軸正在旋轉(zhuǎn)。此外,電機(jī)的啟動轉(zhuǎn)矩限制在3 Hz輸出的150%。對于大多數(shù)可變扭矩應(yīng)用而言,有限的啟動扭矩綽綽有余。事實(shí)上,現(xiàn)場幾乎所有可變扭矩風(fēng)扇和泵應(yīng)用都使用V / f控制。
V / f方法的相對簡單性部分歸因于其“更寬松”的規(guī)范。速度調(diào)節(jié)通常為最大頻率的2%至3%。速度響應(yīng)額定值為3 Hz。速度響應(yīng)定義為VFD響應(yīng)參考頻率變化的程度。當(dāng)參考頻率改變時,速度響應(yīng)的增加導(dǎo)致更快的電動機(jī)響應(yīng)。
控制方法還具有速度控制范圍(表示為比率)。V / f的速度控制范圍是1:40。將此比率乘以最大頻率可確定VFD控制電機(jī)的最小運(yùn)行速度。例如,使用60 Hz最大頻率和1:40速度控制范圍,使用V / f控制的驅(qū)動器可以將電機(jī)控制在1.5 Hz。
AV / f模式定義了電機(jī)的電壓與頻率之比,VFD一次只能編程一個V / f模式。V / f模式或曲線根據(jù)給定的速度參考(頻率)確定輸出到電機(jī)的電壓。
操作員或技術(shù)人員可以使用單個參數(shù)在VFD編程中選擇預(yù)設(shè)的V / f模式。預(yù)設(shè)模式針對特定應(yīng)用進(jìn)行了優(yōu)化。用戶可以更進(jìn)一步,編程自定義V / f模式或配置文件,以將VFD調(diào)諧到特定應(yīng)用和正在使用的電機(jī)。
風(fēng)扇和泵等應(yīng)用是可變扭矩負(fù)載。可變扭矩V / f模式可防止故障并提高性能和效率。該模式通過降低較低頻率的電動機(jī)電壓來降低低頻時的磁化電流。
同樣,恒轉(zhuǎn)矩應(yīng)用,如輸送機(jī),擠出機(jī)和提升機(jī),應(yīng)使用恒轉(zhuǎn)矩V / f模式。恒轉(zhuǎn)矩應(yīng)用在所有速度下都需要全磁化電流。因此,在整個速度范圍內(nèi)構(gòu)建并遵循直線斜坡。
通常,VFD將根據(jù)電機(jī)設(shè)置的任何速度輸出電壓,同時參考V / f模式。
帶編碼器的V / f
如果應(yīng)用需要更精確的速度調(diào)節(jié),并且能夠以更高的參考頻率運(yùn)行,則可以將編碼器添加到V / f控制。編碼器反饋將速度調(diào)節(jié)降至最大頻率的0.03%。輸出電壓仍由技術(shù)人員在VFD中編程的所選V / f模式?jīng)Q定。這允許高速控制而沒有高動態(tài)響應(yīng),因?yàn)殡妷汉皖l率是預(yù)定的。
這種控制方法并不常見,因?yàn)樗枰幋a器和反饋卡的成本,并且其優(yōu)于標(biāo)準(zhǔn)V / f控制的優(yōu)點(diǎn)是最小的。啟動轉(zhuǎn)矩,速度響應(yīng)和速度控制范圍都與V / f控制相同。此外,較高的工作頻率受編碼器產(chǎn)生的每轉(zhuǎn)脈沖數(shù)的限制。
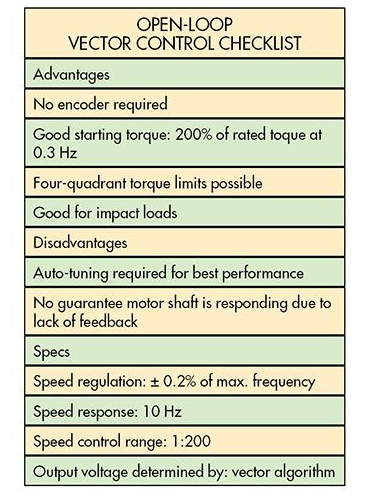
開環(huán)矢量控制
開環(huán)矢量(OLV)控制用于更大和更動態(tài)的電機(jī)控制。它獨(dú)立控制電機(jī)速度和扭矩,就像控制直流電機(jī)一樣。
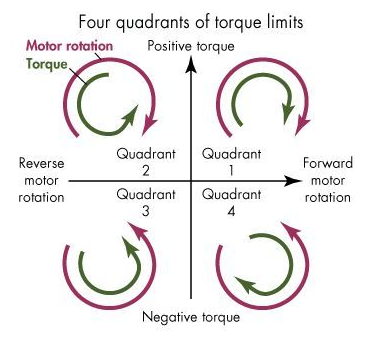
根據(jù)電機(jī)方向(正向或反向)以及電機(jī)是電動還是再生,轉(zhuǎn)矩極限可分為四個象限。例如,瓶蓋將需要為象限1設(shè)置扭矩限制。或者,展開應(yīng)用將需要正向電動機(jī)旋轉(zhuǎn)來供給線,但是由于線被拉動以產(chǎn)生張力而由于再生而產(chǎn)生負(fù)扭矩極限。因此扭矩限制將在象限4中設(shè)定。
運(yùn)行OLV時,電機(jī)可以0.3 Hz的頻率產(chǎn)生200%的額定扭矩。較低速度下較高的啟動扭矩為各種應(yīng)用打開了大門。該控制方法還允許四象限扭矩限制。
扭矩限制主要限制電機(jī)扭矩,以防止損壞設(shè)備,機(jī)器或產(chǎn)品。它們分為四個不同的象限,取決于電機(jī)方向(正向或反向),以及電機(jī)是電動還是再生。可以為每個象限單獨(dú)設(shè)置限制,或者用戶可以將整體扭矩限制編程到VFD中。
電動機(jī)狀態(tài)是指電動機(jī)的速度和轉(zhuǎn)矩都在同一方向。例如,前進(jìn)速度和前進(jìn)扭矩將使輸送機(jī)向前運(yùn)動。再生是指負(fù)載對電機(jī)進(jìn)行大修。在AC電動機(jī)上,當(dāng)轉(zhuǎn)子比定子中的磁場旋轉(zhuǎn)得更快時,它起到發(fā)電機(jī)的作用。這導(dǎo)致再生能量流回VFD。
例如,瓶蓋可以使用象限1中的扭矩限制(正向旋轉(zhuǎn)和正向扭矩)以防止瓶蓋過度扭矩。它向前移動并使用正扭矩將蓋子放在瓶子上。涉及具有比空車重的配重的電梯的應(yīng)用在象限2中具有限制(反向電動機(jī)旋轉(zhuǎn)和正扭矩)。如果將空車調(diào)到較高樓層,則扭矩與速度方向相反,以保持對配重的控制以及電梯在重力作用下的速度和位置。
從木塊中取出螺釘?shù)臋C(jī)器鉆(反向電機(jī)方向和負(fù)扭矩)可以使用象限3中的限制。退繞應(yīng)用可以使用象限4限制(正向電機(jī)旋轉(zhuǎn)和負(fù)扭矩)。電動機(jī)將旋轉(zhuǎn)電動機(jī)旋轉(zhuǎn)以供給線路,但是由于線路被拉動以產(chǎn)生張力而導(dǎo)致再生,因此還需要負(fù)的扭矩限制。
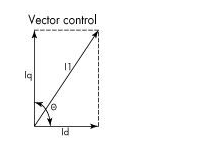
矢量控制通過將轉(zhuǎn)矩產(chǎn)生電流(Iq)和磁化電流(Id)保持在90°來最大化每轉(zhuǎn)矩。I1表示總電動機(jī)電流(Iq + Id)。如果¨》 90°,那么sin¨》 1; 如果¨《90°,那么罪¨》 1; 但如果¨= 90°,則sin¨= 1且扭矩達(dá)到最大值。VFD試圖將¨保持在90°以模擬直流電機(jī)。在直流電機(jī)中,電刷與換向器機(jī)械定位成90°,以不斷產(chǎn)生最大扭矩。
這些VFD中的電流反饋回路允許用戶設(shè)置扭矩限制并在所有四個象限中運(yùn)行。隨著電動機(jī)電流的增加,電動機(jī)轉(zhuǎn)矩也隨之增 如果應(yīng)用需要更大的扭矩,則可以增加輸入到電機(jī)的輸出電壓;當(dāng)達(dá)到扭矩限制時,可以減小輸出電壓。與V / f控制不同,這使得開環(huán)控制動態(tài)化。
除扭矩限制外,開環(huán)控制還具有10 Hz的更快速度響應(yīng),使其能夠處理對沖擊負(fù)載的更多動態(tài)響應(yīng)。例如,巖石破碎機(jī)的負(fù)荷會不斷變化,這取決于正在處理的巖石的大小和數(shù)量。
OLV控制使用矢量算法來找到運(yùn)行電機(jī)的最佳輸出電壓,而不是固定的V / f模式。矢量控制通過使用來自電機(jī)的電流反饋來實(shí)現(xiàn)此目的。通過VFD內(nèi)部的電流互感器測量電流反饋。在VFD中執(zhí)行的恒定電流讀數(shù)和快速計(jì)算確定當(dāng)前的扭矩需求和通量。基本矢量數(shù)學(xué)將電機(jī)的磁化電流和產(chǎn)生轉(zhuǎn)矩的電流分解為矢量。OLV控制在很大程度上取決于電機(jī)動態(tài),因此必須執(zhí)行某種類型的電機(jī)自整定,以確保VFD具有盡可能多的電機(jī)數(shù)據(jù)。
借助可靠的電機(jī)數(shù)據(jù)/參數(shù),VFD可以將磁化電流(I d)和轉(zhuǎn)矩產(chǎn)生電流(I q)計(jì)算為矢量。為了獲得最大效率和扭矩,VFD必須將這兩個矢量分開90°。90°是重要的,因?yàn)閟in(90)= 1,值1表示最大電動機(jī)扭矩。
整體OLV控制導(dǎo)致更嚴(yán)格的控制。速度調(diào)節(jié)是最大頻率的+/- 0.2%,速度控制范圍跳至1:200,允許低速運(yùn)行而不會犧牲扭矩。
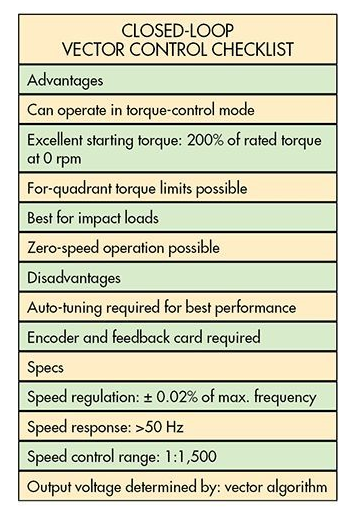
閉環(huán)矢量控制
閉環(huán)矢量控制使用矢量算法來確定輸出電壓,非常類似于開環(huán)控制。關(guān)鍵的區(qū)別在于閉環(huán)矢量使用編碼器。編碼器反饋與矢量控制配合使用,意味著在0 rpm時可獲得200%的電機(jī)額定轉(zhuǎn)矩。這是需要在不移動的情況下保持負(fù)載的應(yīng)用程序的賣點(diǎn),例如電梯,起重機(jī)和升降機(jī)。
編碼器反饋允許速度響應(yīng)超過50 Hz,速度控制范圍為1:1500,是所有控制方法中最高的。閉環(huán)控制還可以在轉(zhuǎn)矩控制模式下運(yùn)行電機(jī)。轉(zhuǎn)矩控制使VFD控制電機(jī)轉(zhuǎn)矩而不是電機(jī)轉(zhuǎn)速。在扭矩比速度更重要的任何應(yīng)用中都需要這樣做。卷繞機(jī),復(fù)卷機(jī),封蓋機(jī)和卷筒紙應(yīng)用程序是使用扭矩控制的好例子。












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論