1 硬件步進(jìn)電機(jī):28BYJ-48步進(jìn)電機(jī)驅(qū)動(dòng):ULN2803單片機(jī):STC89C52 2 步進(jìn)電機(jī)原理、驅(qū)動(dòng)原理2.128BYJ-48步進(jìn)電機(jī)實(shí)物圖 圖128BYJ-48步進(jìn)電機(jī)實(shí)物圖我給它纏了
2021-06-29 09:20:11
`大家有沒有用過35步進(jìn)電機(jī)?這個(gè)步進(jìn)電機(jī)是兩相四線的。我試了一下用ULN2003驅(qū)動(dòng),但是沒有現(xiàn)象,不知道是我程序的問題還是驅(qū)動(dòng)的問題。請(qǐng)問能不能用ULN2003驅(qū)動(dòng)?或者還有其他的驅(qū)動(dòng)方式么?`
2014-03-20 23:31:34
42兩相步進(jìn)電機(jī) 品 牌:銳特 產(chǎn)品類型 :兩相步進(jìn)電機(jī) 型 號(hào):42系列兩相步進(jìn)電機(jī) 規(guī) 格:42CM0442CM0642CM08 極 數(shù): 雙極 額定功率:0.22N.M 耐壓
2021-07-08 08:25:14
42步進(jìn)電機(jī)常用有哪些驅(qū)動(dòng)模塊,各有什么差異
2023-10-15 11:03:11
步進(jìn)電機(jī)步距角精度是什么?步距角是步進(jìn)電機(jī)一個(gè)脈沖轉(zhuǎn)動(dòng)的角度,比如步距角是1.8°,而要轉(zhuǎn)動(dòng)1.2°就轉(zhuǎn)不到,給出一個(gè)脈沖就轉(zhuǎn)1.8°了,就差了0.6°,精度就是不夠。步進(jìn)驅(qū)動(dòng)器有細(xì)分?jǐn)?shù),可以把步距
2021-07-08 10:05:57
步進(jìn)電機(jī)失步現(xiàn)象及原因,關(guān)于步進(jìn)電機(jī)拆開導(dǎo)致轉(zhuǎn)子失磁步進(jìn)電機(jī)拆開導(dǎo)致失磁,輕者運(yùn)轉(zhuǎn)無力,重者報(bào)廢!當(dāng)然也可以重新充磁。充磁需要專業(yè)的充磁機(jī)。我們?nèi)绻枰痖_并防止失磁,可以做一個(gè)工具。這個(gè)工具就是一
2021-07-08 06:37:28
步進(jìn)電機(jī)的步距角怎么改變 我的老機(jī)器 以前步進(jìn)電機(jī)步距角是3.6度的 可是現(xiàn)在不好找了 怎么改下步距角才能用啊
2015-11-01 21:24:31
能夠連續(xù)、平穩(wěn)地轉(zhuǎn)動(dòng),定子必須產(chǎn)生一個(gè)連續(xù)、平均的磁場(chǎng)。因?yàn)閺暮暧^上看,電機(jī)轉(zhuǎn)子始終跟隨電機(jī)定子合成的磁場(chǎng)方向。如果定子合成的磁場(chǎng)變化太快,轉(zhuǎn)子跟隨不上,這時(shí)步進(jìn)電機(jī)就出現(xiàn)失步現(xiàn)象。 [url
2011-02-17 09:24:31
步進(jìn)電機(jī)丟步后怎么對(duì)這個(gè)丟步的脈沖進(jìn)行補(bǔ)償
2023-10-09 07:27:53
`步進(jìn)電機(jī)驅(qū)動(dòng)器是什么 步進(jìn)電機(jī)驅(qū)動(dòng)器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以固定的角度
2019-04-12 06:00:00
借鑒大佬文章https://moore.live/news/197355/detail/簡(jiǎn)析步進(jìn)電機(jī)丟步原因步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖頻率成正比,即脈沖頻率越高步進(jìn)電機(jī)的轉(zhuǎn)速也越高,但提高了脈沖頻率雖然
2021-07-07 06:59:49
現(xiàn)象:步進(jìn)電機(jī)轉(zhuǎn)速慢的情況下會(huì)產(chǎn)生震動(dòng)原因:本身的兩個(gè)特性:矩頻特性、低頻特性(1) 矩頻特性:研控57步進(jìn)電機(jī)啟動(dòng)時(shí)脈沖頻率過高,電機(jī)輸出扭矩較小,負(fù)載較重時(shí)可能會(huì)丟步,從而產(chǎn)生震動(dòng)。選步進(jìn)電機(jī)
2021-06-28 09:05:38
收到的脈沖數(shù)調(diào)節(jié)(也就是程序調(diào)節(jié)),這也是為什么3D打印機(jī)和激光雕刻機(jī)都需要步進(jìn)電機(jī)的原因。但要注意,如果負(fù)載過大,或者供電不足,則有可能出現(xiàn)角度不足的情況,我們稱之為”失步“,即沒有達(dá)到預(yù)定控制的角度
2016-01-13 17:15:16
很多人都說步進(jìn)電機(jī)失步,其實(shí)機(jī)械原因也有很多:如絲桿軸承沒有裝好,絲桿磨損,導(dǎo)軌磨損等等都能讓機(jī)械走不準(zhǔn),還有原點(diǎn)開關(guān)的好壞,直接影響精度。我自己遇到過自己寫的程序出現(xiàn)爭(zhēng)位現(xiàn)象,也許是技術(shù)問題吧
2018-08-24 11:29:53
步進(jìn)電機(jī)在控制的過程中怎么防止丟步
2023-10-12 08:07:53
應(yīng)該怎么檢測(cè)步進(jìn)電機(jī)的丟步情況
2023-10-13 06:47:02
通常什么原因會(huì)導(dǎo)致步進(jìn)電機(jī)丟步
2023-10-13 08:20:22
)廣泛應(yīng)用。步進(jìn)電機(jī)經(jīng)常被用于精確定位的場(chǎng)合,因而保證電機(jī)不發(fā)生失步至關(guān)重要。如果在調(diào)試過程中會(huì)發(fā)現(xiàn) 步進(jìn)電機(jī)丟步、堵轉(zhuǎn)和定位不準(zhǔn)現(xiàn)象 ,遇到這種情況不要著急,更不要因此直接否定所選用步進(jìn)電機(jī),一定要冷靜
2023-04-15 16:33:58
混合式步進(jìn)電機(jī)(常見的1.8度、0.72度的)轉(zhuǎn)子不能拿出來,否則會(huì)退磁的。除非你有充磁機(jī)重新充磁。從前聽過一種說法,修理機(jī)械表頭時(shí),磁鐵拿出來后要用軟鐵短路NS極,這樣不會(huì)失磁,但是步進(jìn)電機(jī)這樣操作
2020-08-25 14:38:12
步進(jìn)電機(jī)拆開就會(huì)失磁的原因你知道嗎
2021-01-25 06:49:16
因?yàn)闀r(shí)間問題,本篇只介紹步進(jìn)電機(jī),下一篇會(huì)介紹配套的步進(jìn)驅(qū)動(dòng)器外觀和結(jié)構(gòu)(因?yàn)?b class="flag-6" style="color: red">步進(jìn)電機(jī)結(jié)構(gòu)可以分為幾類,圖示只是其中一種)步進(jìn)電機(jī)失一種作為控制用的特種電機(jī),他的旋轉(zhuǎn)是以固定的角度(稱為步距角)一步
2021-06-28 08:18:12
目錄步進(jìn)電機(jī)梯形加減速梯形加減速算法原理分析算法實(shí)現(xiàn)步進(jìn)電機(jī)梯形加減速電機(jī)的控制方式一般分為開環(huán)控制與閉環(huán)控制兩種控制方式,其中開環(huán)控制原理框圖如下:這種種控制方式的特點(diǎn)是:控制簡(jiǎn)單、實(shí)現(xiàn)容易、價(jià)格
2021-07-07 07:53:48
3D打印機(jī)打印到一半的時(shí)候電機(jī)失步了怎么辦?打印失步,開始印的時(shí)候都沒問題,可是G-code里面幾千個(gè)指令中,只要其中一個(gè)指令造成電機(jī)失步,整件作品就毀了。發(fā)生失步的原因,其實(shí)很簡(jiǎn)單,就是工作需要
2018-10-12 09:57:50
失步應(yīng)該就是漏掉了脈沖沒有運(yùn)動(dòng)到指定的位置。過沖應(yīng)該就是和失步相反,運(yùn)動(dòng)到超過了指定的位置。失步和過沖現(xiàn)象分別出現(xiàn)在步進(jìn)電機(jī)啟動(dòng)和停止的時(shí)候。一般情況下,系統(tǒng)的極限啟動(dòng)頻率比較低,而要求的運(yùn)行
2021-07-07 08:17:27
步進(jìn)電機(jī)的步距角和步進(jìn)角有什么區(qū)別?{:4_115:}
2013-04-30 10:12:55
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過一個(gè)步距角
2018-10-12 11:07:38
步距角。這一線性關(guān)系的存在,加上步進(jìn)電機(jī)只有周期的誤差而無累積誤差等特點(diǎn)。使得在速度、位置等控制領(lǐng)域用步進(jìn)電機(jī)來控制變的非常的簡(jiǎn)單。雖然步進(jìn)電機(jī)已被廣泛地應(yīng)用,但步進(jìn)電機(jī)并不能像普通的直流電機(jī)...
2021-07-08 07:57:57
說明根據(jù)我讀的《步進(jìn)電機(jī)應(yīng)用技術(shù)》這本書,進(jìn)行的學(xué)習(xí)過程中的知識(shí)記錄和心得體會(huì)的記錄。6.1 靜態(tài)特性??下面介紹速度-動(dòng)態(tài)轉(zhuǎn)矩(dynamic torque)特性的測(cè)量法。步進(jìn)電機(jī)的動(dòng)態(tài)轉(zhuǎn)矩有最大失步轉(zhuǎn)矩與起動(dòng)轉(zhuǎn)矩。這兩種轉(zhuǎn)矩隨驅(qū)動(dòng)頻率的增加而下降,原因是由于線
2021-07-08 07:46:31
步進(jìn)電機(jī)各相輪流接入整步電流后所產(chǎn)生的步距角叫做該步進(jìn)電機(jī)的基本步距角。 F 相步進(jìn)電機(jī)有 F 個(gè)繞組,這 F 個(gè)繞組要均勻地鑲嵌在定子上,因此定子的磁極數(shù)必定是 F 的整數(shù)倍,因此,轉(zhuǎn)子轉(zhuǎn)一圈
2015-12-28 22:19:35
步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖頻率步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖頻率成正比,即脈沖頻率越高步進(jìn)電機(jī)的轉(zhuǎn)速也越高,但提高了脈沖頻率雖然達(dá)到了提速作用,卻損失了力矩。力矩隨脈沖頻率升高而下降的原因: 步進(jìn)電機(jī)產(chǎn)生失步的兩個(gè)
2021-07-08 07:15:24
`步進(jìn)電機(jī)的閉環(huán)控制最主要就是可靠性,開環(huán)有失步的風(fēng)險(xiǎn),失步后控制系統(tǒng)不知道,照常發(fā)脈沖,其實(shí)機(jī)器已經(jīng)失控。閉環(huán)后不會(huì)有失步現(xiàn)象,如果碰到?jīng)_擊力矩大的,造成無法繼續(xù)運(yùn)轉(zhuǎn),電機(jī)會(huì)以最大力矩頂住障礙物
2018-09-05 11:02:31
是什么原因?qū)е?b class="flag-6" style="color: red">步進(jìn)電機(jī)出現(xiàn)丟步
2023-10-10 06:22:47
A4988步進(jìn)電機(jī)驅(qū)動(dòng)器是控制步進(jìn)電機(jī)運(yùn)動(dòng)的關(guān)鍵組件。通過控制驅(qū)動(dòng)電機(jī)線圈的電流,它可以實(shí)現(xiàn)精確和受控的運(yùn)動(dòng)。其簡(jiǎn)單的界面和易于集成使其成為從3D打印機(jī)到機(jī)器人的廣泛應(yīng)用的熱門選擇。步進(jìn)電機(jī)通常
2023-03-10 09:26:06
A4988步進(jìn)電機(jī)驅(qū)動(dòng)板常見問題有哪些?步進(jìn)電機(jī)與直流電機(jī)控制小車的差異是什么?
2021-10-19 07:35:28
A4988如何驅(qū)動(dòng)42步進(jìn)電機(jī)?
2021-10-20 07:53:57
。 同時(shí)您可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速的目的。 3. 28BYJ-48步進(jìn)電機(jī)多用于雕刻機(jī)、3D打印機(jī)等需要精確控制的設(shè)備。本篇使用ULN2003驅(qū)動(dòng)五線四相減速步進(jìn)電機(jī)。
2021-06-29 09:14:34
你好, 我正在評(píng)估L6470作為已停產(chǎn)芯片的替代品,目前已在我們的應(yīng)用中使用。 我必須達(dá)到高速(2500步/秒),但是當(dāng)超過800步/秒時(shí),電機(jī)會(huì)失步。以下是我的電機(jī)特性:根據(jù)數(shù)據(jù)表: Rm
2019-02-13 16:08:15
怎么實(shí)現(xiàn)LPC2378步進(jìn)電機(jī)轉(zhuǎn)速控制??有沒有例子啊
2017-12-14 15:21:54
如圖為M415步進(jìn)電機(jī)驅(qū)動(dòng)器Signal端PUL為脈沖輸入信號(hào)。DIR方向輸入信號(hào),用于改變電機(jī)運(yùn)轉(zhuǎn)方向;ENA為使能信號(hào),用于使能或禁止驅(qū)動(dòng)器輸出;OPTO為脈沖、方向、使能信號(hào)電源正端,接5v
2022-01-06 07:51:28
myrio有好幾個(gè)通道都能發(fā)出pwm,頻率和脈寬都很容易控制。但是如果要控制步進(jìn)電機(jī)走一定的步數(shù)就需要發(fā)出一定數(shù)量的pwm,那么myrio怎么發(fā)出固定數(shù)量的脈沖的。請(qǐng)問各位大神有什么好的思路能?
2016-04-11 21:37:45
STM32+ULN2003驅(qū)動(dòng)28BYJ4步進(jìn)電機(jī)的硬件有哪些?STM32+ULN2003驅(qū)動(dòng)28BYJ4步進(jìn)電機(jī)的驅(qū)動(dòng)代碼是什么?
2021-06-29 08:53:53
最近在做兩輪平衡車,網(wǎng)上都有很多成功的兄弟,所以自己來做,用的是MPU6050(互補(bǔ)濾波),用stm32控制小車,電機(jī)采用的是42步進(jìn)電機(jī)(A4988驅(qū)動(dòng)),結(jié)果在做PID控制時(shí),發(fā)現(xiàn)電機(jī)因?yàn)轭l繁
2019-02-12 06:36:01
STM32步進(jìn)電機(jī)運(yùn)動(dòng)控制
2021-07-08 08:04:13
提示:文章寫完后,目錄可以自動(dòng)生成,如何生成可參考右邊的幫助文檔目錄文章前言一、硬件選型二、使用方法1.初始校準(zhǔn)2.失步校準(zhǔn)總結(jié)文章前言這里是使用的常用的STM32單片機(jī)的PWM脈沖來驅(qū)動(dòng)的步進(jìn)電機(jī)
2022-01-13 06:50:18
`ULN2003步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用程序步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用程序步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用程序步進(jìn)電機(jī)驅(qū)動(dòng)原理及應(yīng)用程序`
2013-07-10 16:59:38
新人求教有人做過labview做上位機(jī),arduino做下位機(jī)控制步進(jìn)電機(jī)轉(zhuǎn)速、步數(shù)、正反轉(zhuǎn)嗎如何通過labview發(fā)送命令給arduinio控制步數(shù)呢
2016-05-24 21:55:24
tb6600步進(jìn)電機(jī)驅(qū)動(dòng)器說明書,Arduino控制42 步進(jìn)電機(jī) 串口控制旋轉(zhuǎn)位置1)描述42步進(jìn)電機(jī)的驅(qū)動(dòng)方式有多種,例如用A4988步進(jìn)電機(jī)模塊,這次我們使用TB6600驅(qū)動(dòng)器驅(qū)動(dòng)一個(gè)42步進(jìn)
2021-07-08 09:42:03
供較高轉(zhuǎn)矩輸出;步進(jìn)電動(dòng)機(jī)的主要缺點(diǎn)是效率低;不能直接使用交流或直流電源,需要適當(dāng)?shù)尿?qū)動(dòng)電源才能運(yùn)行;帶負(fù)載慣量的能力不強(qiáng);在應(yīng)用中可能出現(xiàn)低頻振蕩和失步的現(xiàn)象。03步進(jìn)電機(jī)應(yīng)用中的問題:步進(jìn)電機(jī)一般運(yùn)用
2021-09-10 08:45:23
能力;運(yùn)行性能:步進(jìn)電機(jī)為開環(huán)控制,啟動(dòng)頻率過高或負(fù)載過大可能失步或堵轉(zhuǎn),伺服電機(jī)為閉環(huán)控制,一般不會(huì)出現(xiàn)失步或過沖現(xiàn)象,控制性能更可靠;速度響應(yīng)性能:伺服電機(jī)的響應(yīng)速度遠(yuǎn)快于步進(jìn)電機(jī)
2016-08-19 22:01:04
。這應(yīng)該可以解釋步進(jìn)電機(jī)“失步”的現(xiàn)象,當(dāng)輸入頻率升高后,電機(jī)輸出減少,響應(yīng)就跟不上了,于是就出現(xiàn)了“失步”。可以看到從1KHz開始,頻率再高,電機(jī)實(shí)際輸出的扭矩就開始減小了,不妨稱其為“截止頻率
2016-01-18 14:07:53
為什么步進(jìn)電機(jī)改變運(yùn)動(dòng)方向就容易出現(xiàn)丟步的情況
2023-10-09 08:17:25
五步曲教你步進(jìn)電機(jī)選型 這里用五步教大家對(duì)步進(jìn)電機(jī)選型,避免大家對(duì)步進(jìn)電機(jī)選型錯(cuò)誤帶來各種各樣不必要的麻煩。 第一步:步進(jìn)電機(jī)的保持轉(zhuǎn)矩,相當(dāng)于傳統(tǒng)電機(jī)所說的“功率”。當(dāng)然,他們有著本質(zhì)的區(qū)別。步進(jìn)
2016-01-18 11:38:08
可以把它驅(qū)動(dòng)起來的,以下是我買的一個(gè)步進(jìn)電機(jī)驅(qū)動(dòng)模塊。步進(jìn)電機(jī)選用的是:28BYJ48-H12這里在軟件編程上有一個(gè)比較重要參數(shù)需要了解一下,就是步距角。那么什么是步距角呢?度娘給你答案,可...
2021-07-08 07:27:17
1.步進(jìn)電機(jī)失步概念步進(jìn)電動(dòng)機(jī)正常工作時(shí),每接收一個(gè)控制脈沖就移動(dòng)一個(gè)步距角,即前進(jìn)一步。若連續(xù)地輸入控制脈沖,電動(dòng)機(jī)就相應(yīng)地連續(xù)轉(zhuǎn)動(dòng)。步進(jìn)電動(dòng)機(jī)失步包括丟步和越步。丟步時(shí),轉(zhuǎn)子前進(jìn)的步數(shù)小于脈沖數(shù)
2021-07-07 08:00:55
離散的,逐步的運(yùn)動(dòng)使步進(jìn)電機(jī)具有精確的定位能力,這也可能導(dǎo)致某些不良的性能特征,即由于共振而引起的振動(dòng)和可聽見的噪聲。 步進(jìn)電動(dòng)機(jī)由于轉(zhuǎn)子的慣性而在每一步中自然會(huì)表現(xiàn)出較小的振動(dòng),這會(huì)導(dǎo)致
2023-03-10 09:48:47
A4988步進(jìn)電機(jī)驅(qū)動(dòng)器的控制模式有哪幾種?使用A4988步進(jìn)電機(jī)驅(qū)動(dòng)器有哪些注意事項(xiàng)?
2021-12-20 06:46:04
使用Arduino和A4988步進(jìn)驅(qū)動(dòng)器模塊控制NEMA 17步進(jìn)電機(jī)ARDUINO項(xiàng)目經(jīng)過**阿什什·喬杜里(Ashish Choudhary)** 2019年9月10日修改用Arduino和電位計(jì)控制NEMA 17步進(jìn)電機(jī)步進(jìn)電機(jī)是一...
2021-07-08 07:37:47
應(yīng)該是·由于點(diǎn)擊反復(fù)啟停造成的)。還有一個(gè)問題是我的步進(jìn)電機(jī)是帶減速器的,5.18:1,我想知道這個(gè)值是怎么產(chǎn)生的,這種比例無法算出準(zhǔn)確的步距角啊。還有有時(shí)候根據(jù)給定值算出的步距角與實(shí)際轉(zhuǎn)動(dòng)步距角有較大誤差,是因?yàn)轭l率過高,造成的失步現(xiàn)象嚴(yán)重造成的嗎?
2015-07-25 11:30:05
,速度和力矩的閉環(huán)控制;克服了步進(jìn)電機(jī)失步的問題;2、高速性能好,一般額定轉(zhuǎn)速能達(dá)到2000~3000轉(zhuǎn);3、抗過載能力強(qiáng),能承受三倍于額定轉(zhuǎn)矩的負(fù)載,對(duì)有瞬間負(fù)載波動(dòng)和要求快速起動(dòng)的場(chǎng)合特別適用;4
2018-08-28 15:36:30
[導(dǎo)讀] 大家好,我是逸珺。今天想分享一種超級(jí)實(shí)用的步進(jìn)電機(jī)調(diào)速算法,這種算法在步進(jìn)電機(jī)調(diào)速方案中可以說是一種非常優(yōu)異的方案。梯形調(diào)速算法為啥需要設(shè)計(jì)一個(gè)調(diào)速算法呢?步進(jìn)電機(jī)不是給多少脈沖就動(dòng)多少步
2021-09-03 09:05:44
說起步進(jìn)電機(jī),對(duì)于電氣控制行業(yè)的工程師來說應(yīng)該再熟悉不過了!它的誤差不會(huì)長(zhǎng)期積累,能夠?qū)崿F(xiàn)精確定位,控制比伺服簡(jiǎn)單等優(yōu)點(diǎn),但步進(jìn)電機(jī)精確控制的前提是電機(jī)不發(fā)生失步,如何才能避免步進(jìn)電機(jī)失步? 步進(jìn)
2016-07-28 16:13:35
如何使用Arduino開發(fā)板和DRV8825步進(jìn)模塊控制NEMA17步進(jìn)電機(jī)?
2021-10-28 07:06:54
步進(jìn)電機(jī)是一種直流電機(jī),它可以步進(jìn)方式工作,從監(jiān)控?cái)z像機(jī)到復(fù)雜的機(jī)器人,無處不在。 NEMA 17步進(jìn)電機(jī)的步進(jìn)角為1.8°,這意味著它需要200步才能進(jìn)行360°旋轉(zhuǎn)。通過改變施加的控制信號(hào)的速率
2021-08-31 07:25:35
42步進(jìn)電機(jī)的特點(diǎn)有哪些?如何利用STM32F103C8T6去控制42步進(jìn)電機(jī)呢?
2021-12-20 07:37:19
TMC5160步進(jìn)電機(jī)有哪幾種模式呢?如何去實(shí)現(xiàn)TMC5160步進(jìn)電機(jī)的簡(jiǎn)單轉(zhuǎn)動(dòng)呢?
2021-12-20 07:48:19
DRV8825步進(jìn)電機(jī)的控制要領(lǐng)有哪些?如何去控制DRV8825步進(jìn)電機(jī)的方向及轉(zhuǎn)動(dòng)呢?
2021-12-21 07:14:09
一、硬件1.硬件準(zhǔn)備:57步進(jìn)電機(jī)和驅(qū)動(dòng)器2.連線驅(qū)動(dòng)器右邊分有兩個(gè)區(qū)域Signal:用于驅(qū)動(dòng)器與開發(fā)板連接,進(jìn)行電機(jī)的控制驅(qū)動(dòng)。ENA接口:當(dāng)此信號(hào)有效時(shí),驅(qū)動(dòng)器將自動(dòng)切斷電機(jī)繞組電流,使電機(jī)處于
2021-07-07 07:53:37
步進(jìn)電機(jī)一般參數(shù)有步距角、步距角精度、電阻精度、電感精度、溫升、環(huán)境溫度、絕緣電阻、耐壓、徑向間隙、軸向間隙、徑向最大負(fù)載、軸向最大負(fù)載。其中步進(jìn)電機(jī)里面的步距角到底是什么呢? 步距角它表示
2016-01-19 09:10:22
VID6606步進(jìn)電機(jī)是什么?VID6606步進(jìn)電機(jī)的功能和特點(diǎn)有哪些?如何用AVR單片機(jī)控制VID6606步進(jìn)電機(jī)去驅(qū)動(dòng)VID29?
2021-09-22 07:48:25
什么叫失步呢?帶編碼器的步進(jìn)電機(jī)它有什么好處呢?
2021-07-13 08:04:47
怎么實(shí)現(xiàn)STM32步進(jìn)電機(jī)的加減速?
2021-10-19 09:55:56
。永磁型同步電機(jī)已經(jīng)成為電動(dòng)汽車的主要拖動(dòng)部件。 盡管同步電機(jī)穩(wěn)態(tài)運(yùn)行時(shí)的轉(zhuǎn)速與負(fù)載大小無關(guān),但是也不意味著同步電機(jī)可以帶動(dòng)無限大的負(fù)載,于是便有了“失步”這個(gè)概念。 當(dāng)同步電機(jī)的負(fù)載不斷增大
2023-03-07 15:11:53
求助關(guān)于步進(jìn)電機(jī)轉(zhuǎn)很小角度會(huì)失步回撤問題自己做的一個(gè)項(xiàng)目中需要控制步進(jìn)電機(jī)轉(zhuǎn)固定小角度,例如15、30度的。用的步進(jìn)電機(jī)步距角是15度,用A3979驅(qū)動(dòng)器驅(qū)動(dòng),采用16細(xì)分,這樣算下來轉(zhuǎn)一圈需要
2021-06-29 06:56:08
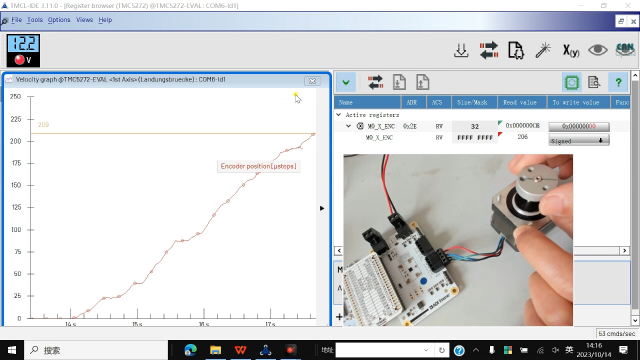
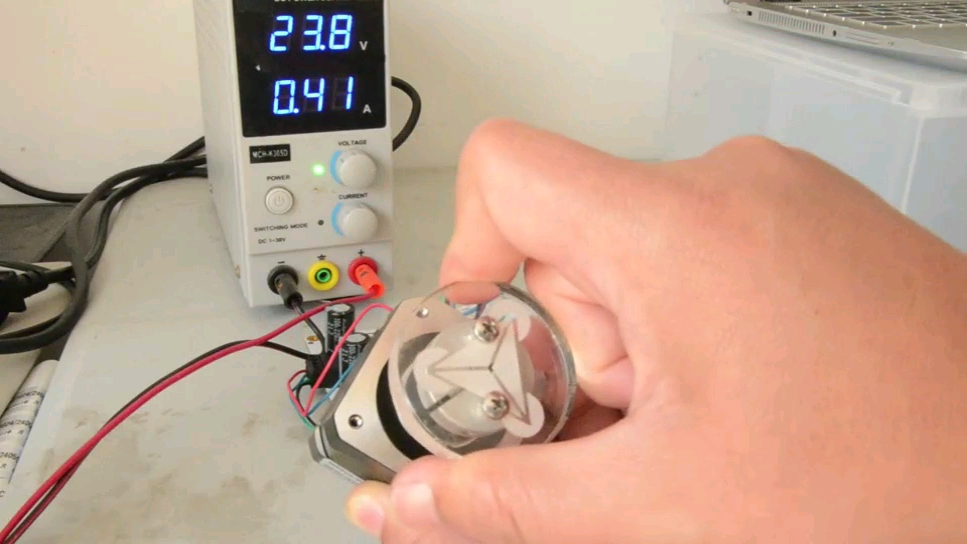
和噪聲困擾的難題,Spreadcycle高速度高動(dòng)態(tài)電流控制,解決常規(guī)步進(jìn)電機(jī)高速容易堵轉(zhuǎn),高速上不去的問題。TMC5272和TMC5271還帶有不需要編碼器情況下編碼失步,其中Stallguard
2023-10-22 11:41:32
目標(biāo):用步進(jìn)電機(jī)驅(qū)動(dòng)器驅(qū)動(dòng)42步進(jìn)電機(jī),并精確控制脈沖個(gè)數(shù)。步進(jìn)電機(jī)器如下圖:第一步 STM32CubeMX配置TIM2_CH1,并生成代碼。TIM2的NVIC也要打開,如圖:第二步 :在生成的代碼
2021-09-16 06:02:55
請(qǐng)教一下大神伺服
電機(jī)失步時(shí)是怎樣得到補(bǔ)償?shù)模?/div>
2023-03-23 15:34:44
tb6600步進(jìn)電機(jī)驅(qū)動(dòng)器對(duì)步進(jìn)電機(jī)的脈沖寬度的影響?
2021-10-28 06:41:36
幾個(gè)小招輕松教你解決伺服電機(jī)的失步問題有時(shí)候電機(jī)會(huì)發(fā)生失步,下面是失步的幾個(gè)解決方法: 1、檢查電機(jī)是否存在干擾或伺服本身參數(shù)沒有設(shè)置恰當(dāng)導(dǎo)致。 2、確認(rèn)伺服馬達(dá)接收脈沖數(shù)(A5系列
2016-01-13 14:25:00
概述:一款即支持S/D脈沖控制,又支持RS485總線控制,體積小巧,主要用以42步進(jìn)電機(jī)的驅(qū)動(dòng)控制器。參數(shù):電壓:9-28V電流:1.4A微步細(xì)分:256內(nèi)插細(xì)分只支持RS485、S/D脈沖控制
2022-09-26 17:56:35
步進(jìn)電機(jī)產(chǎn)生共振是因?yàn)?b class="flag-6" style="color: red">電機(jī)接收的脈沖頻率等于步進(jìn)電機(jī)的固有頻率,該頻率與驅(qū)動(dòng)器的細(xì)分有關(guān)系。
2018-09-14 08:43:00 9061
9061 步進(jìn)電機(jī)在長(zhǎng)時(shí)間堵轉(zhuǎn)的情況下會(huì)因?yàn)檫^熱而導(dǎo)致?lián)p壞甚至燒毀電機(jī),因此應(yīng)盡可能避免步進(jìn)電機(jī)堵轉(zhuǎn)。
步進(jìn)電機(jī)堵轉(zhuǎn)可能是由于機(jī)械阻力過大、驅(qū)動(dòng)電壓不足或者驅(qū)動(dòng)電流不足等原因引起的。在設(shè)計(jì)和使用步進(jìn)
2023-03-08 16:00:164198 。 選步進(jìn)電機(jī)時(shí)按扭矩來選,不按功率選。
(2)低頻特性 在脈沖頻率很低時(shí),一般是180-250pulse/s所對(duì)應(yīng)的轉(zhuǎn)速是5-10轉(zhuǎn),步進(jìn)電機(jī)不可避免的會(huì)產(chǎn)生震動(dòng)。
2023-03-22 10:04:34 0
0 已全部加載完成
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論