 電子發燒友App
電子發燒友App


?
無論是工業控制還是其他領域,任何新設計的重點都是如何使系統盡可能高效。提高系統效率具有多項好處。首先,效率提高后,整體系統功耗預算會減少,從而實現節能并降低成本;其次,不用像以前那樣依賴昂貴的熱冷卻系統;最后,功耗壓力減小,因此系統集成度可以進一步提高。對于許多應用,這可以通過軟件方式實現,如控制系統關鍵事件、計劃過程的運行時間和停機時間或關斷過程內的非關鍵組件。但對于大多數需要持續監控過程變量的過程控制應用,系統根本就不可能進入省電模式。而其他一些應用則又過于復雜,讓系統離線既昂貴又耗時。因此,對于這些應用,要做到省電,就必須使用高效而智能的集成電路器件,實現僅在需要的位置和需要的時候供電。
PLC概述
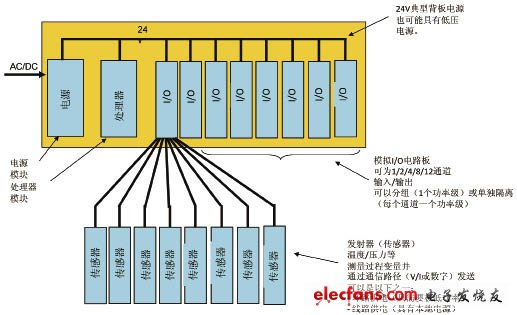
圖1中是一種典型的工業控制系統。工業控制系統既可用于機械和工廠控制等行業,也可用于油壓、氣壓檢測和液體流速等過程控制應用。根據從遠程站點收到的信息,系統自動或由操作員將監控命令推送至遠程站點控制器件,通常也稱為現場器件。這些現場器件控制本地操作,如打開和關閉閥門和斷路器、從傳感器系統收集數據以及監控本地環境是否達到報警條件等等。此處顯示的PLC機架系統通常包含一個電源模塊、一個處理器模塊以及多個模擬I/O和數字I/O卡。每個模擬或數字I/O卡均與遠程傳感器和執行器通信,通信形式可能為數字或模擬電壓和電流。
?
圖1 典型PLC架構
仔細觀察模擬I/O卡,可以看到輸入在很大范圍內變化,從傳感器(如RTD或熱電偶)發出的小信號輸入到模擬電流或電壓輸入(例如4-20mA或±10V)不等。大多數時候,電壓輸入都具有相當高的輸入阻抗。對于電流輸入,一般還會端接阻值相對較小的檢測電阻。因此,就系統總功耗而言,模擬輸入卡往往相當高效,通常總功耗僅為1W~2W。而模擬輸出卻完全呈現另外一種趨勢。電流和電壓輸出均有效驅動至未知負載內,因此模塊設計人員需要確保輸出在故障條件下也能得到保護,如短路或接線錯誤事件。設計人員既要保護IC,又要確保模塊功耗最低。根據卡內的通道數量,通常功耗最高可達10W。
可插入PLC機架插槽的典型I/O卡的尺寸在過去10年中一直在縮小,目前正在量產的8通道模塊一般而言是一個90 mm×70 mm、高度約23.5mm的模塊。行業趨勢今后仍是尺寸進一步縮小,而這實際上也是市場驅動的需求。同時,通道密度或數量也需要增加,這樣既可以提升模塊功能,又可以增加價格競爭力。顯然,對于給定尺寸的此類模塊,功耗正在成為關鍵,而使用空氣對流技術的熱冷卻系統不僅昂貴、占用空間,還不太節能。因而需要考慮以其他方式來解決功耗挑戰。
未來設計挑戰
這些要求給設計人員帶來了哪些挑戰呢?首先,空間不變而通道密度增加將顯著提高模塊的環境溫度。這不同于IC自熱效應,但后者也很重要,設計時同樣需要考慮。在某些情況下,高達100℃的系統環境溫度并不罕見。這本身就對最高IC結溫造成了挑戰。通道密度增加也意味著元件數量增加,因此顯然要求元件尺寸更小、靜態電流更低且效率更高。而溫度范圍擴展也意味著還需要考慮溫漂帶來的誤差,因而迫切需要低ppm基準電壓源和低漂移轉換器。從功耗的角度看,許多設計人員需要犧牲設計規格來滿足功耗預算。這樣雖然可行,但卻會導致產品競爭力下降。
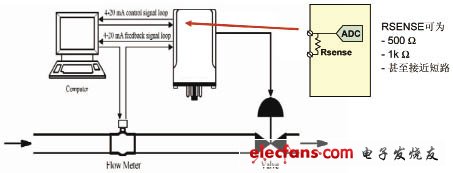
以工業過程控制應用中的簡單流量計系統為例。在圖2中,流量計通過一個4-20mA的過程變量等監控流速,同時通過一個類似的4-20mA信號控制定位器,從而驅動執行器閥門控制器,并最終控制系統內液體或氣體的流速。定位器的4-20mA信號需要使用檢測電阻端接,并最終饋送至ADC。這些檢測電阻變化范圍很大,從50Ω~1KΩ不等。由于需要支持如此廣泛范圍的負載,4-20mA系統的設計變得愈加復雜,尤其在如何處理正常模式(特別是故障條件)下的功耗問題。處理功耗問題有幾種方式,一個簡單辦法是添加外部元件,如用于處理功率過大的升壓晶體管。雖然此方法確實有助于降低半導體器件的功耗,實際上卻并未降低模塊本身的功耗。
?
圖2 4-20mA控制閥門執行器的定位器
可通過一個實際例子說明某些功耗系數。如上所述,這些4-20mA環路通過一個負載電阻端接,阻值可高達1KΩ。當將24mA驅動至1KΩ負載時,輸出電壓至少應為24 V,以提供足夠的順從電壓。這并未包括驅動器件的任何裕量,甚至未考慮到電源調節。假設驅動器件具有2V裕量,則電源電壓最低約為26V。為了說明這對內部芯片溫度的影響,我們以AD5422器件為例。AD5422是單通道16位DAC,具有適合工業控制應用的可編程電流和電壓輸出范圍。
假設電流輸出(如0mA~24mA)驅動至短路或空載,則所有功率都在模塊內損耗。這種情況下,僅負載總功耗就是26V的電源電壓乘以24mA的滿量程輸出電流,約為624mW。由于IC器件會感受到所有這些功率,因此必須考慮芯片上消耗這些電能而產生的熱效應。所以首要問題是如何限制器件自熱,而要改善熱保護,一個常用方法是在芯片底部添加裸露焊盤。
裸露焊盤技術
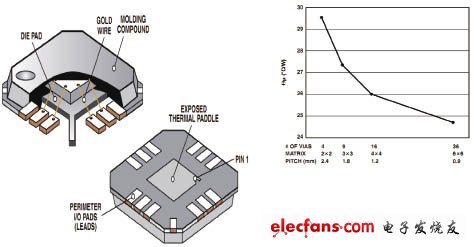
裸露焊盤可提供低熱阻路徑,從而便于PCB散熱。這一阻性路徑將帶走器件的大部分熱量,因此可以有效充當集成電路的散熱器,如圖3所示。
?
圖3 裸露焊盤及散熱通孔影響
接合區本身是PCB元件側上的銅層。接合區至少應和裸露焊盤一樣大,當然也可以更大,具體取決于裸露焊盤至其他引腳接合區的自由空間范圍。散熱通孔將熱量從熱接合區引導至接地層,并通過PCB底部擴散至環境溫度。多通孔可改善IC散熱,同時改善接地電氣連接。需要注意的一件事情是,設計中的通孔數量取決于具體應用的功耗和電氣要求。但這里存在一個“效益遞減”點,如本幻燈片右側曲線圖所示,達到此點后,增加散熱通孔可能不會顯著改善封裝性能。以此處的LFCSP器件為例,顯然如果將通孔從4個增加至16個,則可實現大約4℃/W的熱阻改善。又例如,如果進一步將通孔從16個增加至32個,實際上僅能獲得1℃/W的額外改善。
AD5422采用6×6 LFCSP封裝,底部提供裸露焊盤。這種情況下,裸露焊盤應連接到器件的最低負基板以獲得適當的熱性能和電氣性能,本例中是AVSS層。熱阻抗值可以在數據手冊上找到,此封裝的額定值為28℃/W。這就明確決定了芯片上每消耗1W功率時內部芯片溫度的升高程度。此數值需要加到系統環境溫度中,以決定最大系統工作條件。
如果考慮到短路條件下的功耗約為0.6W,且此LFCSP封裝在連接裸露焊盤后的熱阻抗為28℃/W,則可計算出故障條件下芯片溫度將增加16.8℃。當然,還需要考慮到因器件靜態電流而帶來的溫度增加,如AVSS和AVDD電源電流。通過參考數據手冊,可以計算出這些靜態電流源的總功耗約為128mW,而這些功率本身可導致芯片溫度升高約3.5℃。因此,采用26V電源供電時,如果將24mA驅動至短路負載,則將此3.5℃加上短路條件下的16.8℃可以得到,芯片溫度總共會上升約20℃。
計算模塊內的最大容許系統溫度變得非常容易。用器件的最大結溫(可直接從數據手冊中獲得)減去內部自熱引起的下降即可。通過簡單的算術可知,內部最大芯片溫度為125℃。在此基礎上減去20.3℃,即可得出系統或最大系統環境溫度為104.7℃。大多數系統都可以在70℃~80℃的環境下工作,因此對于此處示例,設計人員就不用再擔心什么。一個問題是,某些情況下系統中可能需要電壓更高的電源,具體可能取決于產品所用于的應用類型。如果超過40V或45V,則片內功耗可增加至接近1W,不過只要遵循上述規則和指南并確保系統內的環境溫度足夠低,那么器件仍可正常工作。
如上所述,我們能夠添加外部過流器件,使過多電流從外部到達器件,作用就好像傳輸晶體管,從而保證芯片上的功耗較低。當然,此晶體管必須能夠承載適當的電流,而不給系統帶來任何誤差。雖然這肯定是改善IC器件的一種方法,但仍要求所有功率都在模塊內損耗。如果考慮到模塊尺寸越來越小,有時系統內的通道數量可能受限,或者需要減小要驅動的最大負載,以保持低功耗。
智能電源方案
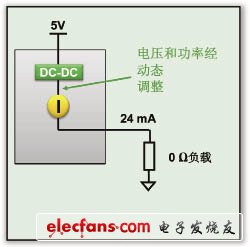
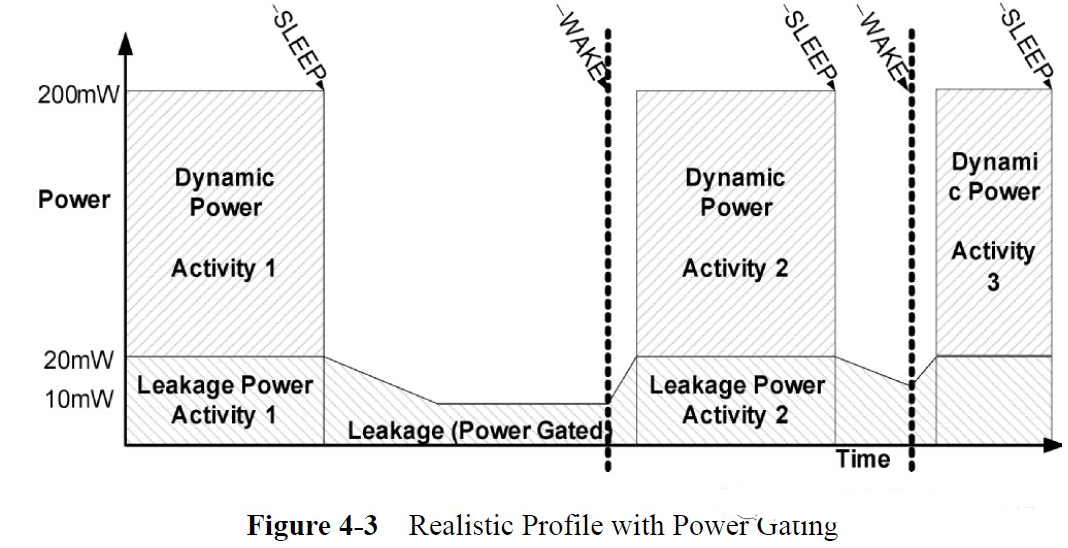
ADI解決此問題的一個方式是實施智能電源方案,它可以檢測輸出負載,然后在編程電流變化或負載變化時根據需要動態地更改輸出順從電壓。只需在片內集成DC-DC升壓轉換器即可,它可以升高低壓電源的電壓,從而提供輸出端所需的任何順從電壓。采用5V標稱電源運行DC-DC轉換器時,輸出端的最低調節電壓約為7 V,而最高電源電壓可超過30 V,具體取決于需求。該示例從理論上解釋了新設計的工作原理并計算出使用動態功率控制功能時的功率利用率,但是注意這是針對4通道輸出器件。這種情況下,需要再次考慮零負載條件,這是電流輸出的一種有效條件。器件的內部電路會檢測輸出,而在發現無需驅動負載時,器件會將內部DC-DC輸出調節至約7V;這時,對于一個驅動24mA輸出的通道,芯片功耗將降至最小,約0.168W。AD5755已經在4通道器件上實施了這一集成電源管理方案。這款四通道器件具有完全可編程的電流和電壓輸出范圍且分辨率高達16位,同時每個通道都集成DC-DC以提供集成式動態功率控制。因此,對于四個輸出端短路的通道,片內最大功耗僅為0.672 W,與相同條件下的現有解決方案相比,能耗降低達4倍。通過使用動態功率控制功能,我們不僅可以確保器件自我保護,而且可以將模塊內的功耗降至較低,如圖4所示。
?
圖4 動態功率控制
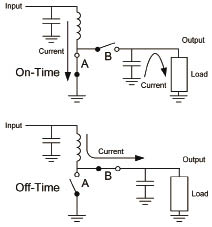
集成式片內DC-DC的實現方式類似于標準升壓轉換器,如圖5所示,而升壓轉換器通常由兩個開關、一個輸入/輸出電容和一個能量電感組成。第一階段中,開關A閉合,而B斷開,使得電感電流根據電感內的變化而呈線性增加,等于dV×dt/L。第二階段中,開關A斷開,而B閉合,因此電感連接至負載和輸出電容;在此關斷時間期間,電感電流從輸入端流向輸出端,而由于電感嘗試保持電流恒定,通過開關B連接至負載的電感端的電壓將升高。這類電感一般有兩種工作模式,即連續和斷續模式;當升壓轉換器在連續模式下工作時,通過電感的電流不會降至零。但在某些情況下,負載所需的能量很少,無需整個占空比周期即可完成傳輸。這種情況下,通過電感的電流可能降至零。與上文所述原理的唯一差異是電感在占空比結束前完全放電,這稱為斷續模式。
?
圖5 升壓轉換器原理圖
AD5755上的升壓電感電路使用恒定頻率電流模式控制方案來升高5V效果的低壓輸入,從而驅動輸出,而此DC-DC采用占空比小于90%的斷續導通模式工作。因此,圖中所示為異步轉換器;也就是說需要外部肖特基二極管來代替上述開關I。肖特基二極管用于將功率損耗降至最低。正向壓降較大的二極管會導致效率下降。AD5755本身包含約0.425Ω的內部開關,用于開關DC-DC,并且開關電流接受監控且峰值電流限于約0.8 A。開關轉換器還有一些其他功能,開關頻率可在器件上選擇,共有四種不同選項。每個通道的相位也可調整,使所有相位90度反相,因此通過支持不同的時鐘邊沿,DC-DC轉換器可以減少輸入端的峰值電源要求。在典型應用中,建議采用約410kHz的開關頻率。負載較小時,DC-DC轉換器將進入脈沖跳躍模式,以較大程度地降低開關功耗。
四通道器件AD5755每個通道均具有可編程電流和電壓輸出。同樣地,16位CDAC的每個通道也具有16位增益和失調寄存器,使用戶可以設置任何輸出范圍的零電平和滿量程值。現在,每個通道還具有專用HART引腳,經全面測試與HART兼容。除已經提到的動態功率控制功能之外,器件內還集成了許多其他診斷功能。左側可以看到看門狗定時器,它會監控SPI引腳上的活動。例如,如果系統內的微控制器發生故障,則看門狗定時器可以置位故障條件,后者接著可用于將輸出置于已知或故障安全條件下。另外所有輸出通道上都具有斷路和短路檢測及保護功能。最后,器件上提供了數字壓擺率控制功能,使用戶可以設置輸出壓擺率。這對執行器控制應用等很有用,例如控制慢速器件時想要限制快速輸出變化。
比較一下動態功率控制功能的一些結果,在短路條件下對所有四路輸出同時實施及不實施動態功率控制功能時的結溫升高情況可以看到結果,未使能動態功率控制時,內部芯片溫度升高約70℃,這在硅IC級別實現了75%的熱節省。實際上,這些功率和熱優勢使客戶可以在自己的系統中實現通道密度增加,而不必增加模塊或機架尺寸或犧牲其他設計參數,如溫度范圍、電源或負載條件。
人們常常會問這樣一些問題,片內DC-DC會產生多少紋波?以及這對系統性能有何影響?特別是考慮到后置調節階段不使用LDO時?設計電路時用到了DC-DC抑制元件,而AVCC是DC-DC-DC輸入的電源,通常為5 V。10Ω電阻左側是DC-DC的輸出端;出于完整性考慮,我們添加了可選低通RC濾波器,充當一階抗混疊濾波器。所設計的電路也具有4~20 mA輸出。現在這里將有一些阻性負載和一些容性負載,而電纜一般使用單獨屏蔽的單對或多對雙絞線電纜,導線電容取決于電纜類型,但每英尺約在20pF~50pF范圍內較佳。存在電阻負載時,前面已經提到最大端接電阻為1kΩ,本例中使用相同值,另外我們還為電容提供了可選負載連接,這是為了在需要時仿真環路電容。器件設置為將20mA滿量程電流輸出至1kΩ負載,而VBoost輸出以及4-20mA輸出均交流耦合至示波器。對于示波器上的每個格,兩個波形均設置為約5mA,可以看到VBoost輸出端無容性負載時紋波約為7.6 mV。這是4-20mA輸出,此情況下滿量程建立時間約為580μs。如果為輸出負載添加1nF電容(這是為了仿真線路電容),可以看到電容或峰峰值紋波降低至約4.24 mV。再次將電容增加至10nF時,紋波將降至2mV以下,而輸出建立時間再次略微增加。值得注意的是,對于電壓模式,建立時間仍為幾微秒級別,此處的所有建立時間數據僅與電流模式輸出相關。這說明了紋波幅度與建立時間和輸出電容之間存在權衡關系。系統設計人員必須確定系統可以容許的紋波大小情況。
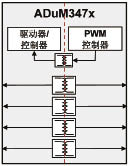
在之前的解決方案中,是使用多個分立元件能提供完整的系統級解決方案。SPI接口、開關變壓器、PWM控制器和降壓DC-DC轉換器均需要分立式數據隔離器,以便產生為轉換器供電所需的隔離DC-DC電源。所有這些元件都會增加系統電路板面積、空間和成本。對于低功耗模塊,例如1W~2W級別,特別是需要通道間隔離的模塊,圖6中顯示的AD347X系列器件可為電源和隔離提供更高程度的整合,是集成度更高的電源管理解決方案。這些都是四通道數字隔離器,但也集成了用于隔離式DC-DC轉換器的PWM控制器和變壓器驅動器。這樣便無需單獨的隔離式DC-DC轉換器以及功耗為2W或更低的設計。
?
圖6 ADuM347x隔離式PWM控制器和四通道數字隔離器









 工商網監
工商網監
評論