手勢(shì)識(shí)別對(duì)于我們來(lái)說(shuō)并不陌生,手勢(shì)識(shí)別技術(shù)很早就有,目前也在逐漸成熟,現(xiàn)在大部分消費(fèi)類應(yīng)用都在試圖增加這一識(shí)別功能,無(wú)論是智能家居,智能可穿戴以及VR 等應(yīng)用領(lǐng)域,增加了手勢(shì)識(shí)別控制功能,必能成為該應(yīng)用產(chǎn)品的一大賣點(diǎn)。
2016-12-22 13:50:08 74444
74444 對(duì)于目前做智能硬件的創(chuàng)業(yè)者來(lái)說(shuō),如何協(xié)調(diào)軟件和硬件,如何平衡外觀設(shè)計(jì)和功能,如何更好地實(shí)現(xiàn)用戶體驗(yàn)是個(gè)必須要解決的問(wèn)題。當(dāng)天馬行空的互聯(lián)網(wǎng)從業(yè)者開始接地氣要做硬件創(chuàng)業(yè),面臨的所有問(wèn)題都是新問(wèn)題。##銷售與服務(wù)環(huán)節(jié)
2014-12-23 09:58:59770 談起手勢(shì)識(shí)別技術(shù),由簡(jiǎn)單粗略的到復(fù)雜精細(xì)的,大致可以分為三個(gè)等級(jí):二維手型識(shí)別、二維手勢(shì)識(shí)別、三維手勢(shì)識(shí)別。在具體討論手勢(shì)識(shí)別之前,我們有必要先知道二維和三維的差別。
2015-03-01 10:59:072979 據(jù)華爾街券商柯文公司(Cowen and Company)周三提供給客戶的一份研究報(bào)告稱,蘋果的下一代iPhone可能會(huì)包含某種面部識(shí)別或手勢(shì)識(shí)別功能。
2017-01-19 10:32:06612 電子發(fā)燒友網(wǎng)報(bào)道(文/黃山明)手勢(shì)識(shí)別傳感器,顧名思義是一種能夠?qū)τ脩?b class="flag-6" style="color: red">手勢(shì)動(dòng)作進(jìn)行識(shí)別的傳感器。手勢(shì)識(shí)別傳感器可以應(yīng)用于很多領(lǐng)域,例如醫(yī)療健康、機(jī)器人技術(shù)、人機(jī)交互和人工智能等。而手勢(shì)識(shí)別技術(shù)可以用
2023-09-22 01:23:002261 3-D手勢(shì)識(shí)別將不再只是小兒科了。自從3-D手勢(shì)識(shí)別首次出現(xiàn)在任天堂(Nintendo)的 Wii無(wú)線游戲操作界面之后,MEMS感應(yīng)手勢(shì)識(shí)別技術(shù)就不斷延伸到智能電話領(lǐng)域,并將占領(lǐng)絕大部分用戶界面
2011-03-02 14:21:39
方案,這是一款智能人性化的水龍頭,控制模塊采用了手勢(shì)識(shí)別開關(guān)PCBA,可以輕松識(shí)別人體的手勢(shì)動(dòng)作并響應(yīng)對(duì)應(yīng)功能,完美實(shí)現(xiàn)用水零接觸。零接觸抗菌水龍頭方案功能介紹:1. 多功能手勢(shì)控制,所有功能均可
2021-12-03 14:24:36
目錄智能家居硬件小制作(含源碼)《手勢(shì)識(shí)別控制器》基于PAJ7620手勢(shì)模塊、L298N驅(qū)動(dòng)板、arduino介紹材料PAJ7620手勢(shì)模塊參數(shù)硬件連接庫(kù)文件使用其他硬件制作手勢(shì)識(shí)別控制器接線
2021-09-07 06:45:10
手勢(shì)識(shí)別裝置...
2021-08-06 09:39:56
燈方案。智能感應(yīng)手勢(shì)燈方案使用了手勢(shì)感應(yīng)PCBA,這款智能開關(guān)可以識(shí)別手勢(shì)動(dòng)作,通過(guò)不同的手勢(shì)可以響應(yīng)不同的功能,適用的產(chǎn)品非常多,比如臺(tái)燈,家居燈,化妝鏡燈,還有一些兒童玩具等等使用這款開關(guān)來(lái)做
2021-11-16 09:50:24
本帖最后由 kiter_rp 于 2014-9-11 14:23 編輯
總體來(lái)分析手勢(shì)有關(guān)涉及到手勢(shì)匹配相關(guān)的源碼類之間的關(guān)系,如下圖: 上圖中的相關(guān)類簡(jiǎn)介:GestureLibrary:手勢(shì)
2014-09-11 14:22:07
德國(guó)艾爾默斯半導(dǎo)體公司(ELMOS)日前宣布推出一款用于手勢(shì)識(shí)別的非接觸式光電傳感器芯片E527.16.該款芯片是基于HALIOS的基本工作原理:一個(gè)LED管發(fā)射出經(jīng)過(guò)調(diào)制的紅外光,當(dāng)這些紅外光
2018-11-13 16:00:23
2.概述一個(gè)簡(jiǎn)單的AI開發(fā)sampleGithub開源的數(shù)字手勢(shì)識(shí)別CNN模型,識(shí)別數(shù)字0-10十一種手勢(shì)類LeNet-5,兩個(gè)卷積層,兩個(gè)池化層,一個(gè)全連接層,一個(gè)Softmax輸出層3.RKNN
2022-04-02 15:22:11
識(shí)別成功,擁有三個(gè)可選參數(shù):
fingers:非必選參數(shù),用于聲明觸發(fā)滑動(dòng)手勢(shì)所需要的最少手指數(shù)量,最小值為1,最大值為10,默認(rèn)值為1。
direction:非必選參數(shù),用于聲明觸發(fā)滑動(dòng)手勢(shì)的方向,此
2023-09-06 14:14:54
?:number})
拖動(dòng)手勢(shì)用于觸發(fā)拖動(dòng)手勢(shì)事件,滑動(dòng)達(dá)到最小滑動(dòng)距離(默認(rèn)值為5vp)時(shí)拖動(dòng)手勢(shì)識(shí)別成功,擁有三個(gè)可選參數(shù):
fingers:非必選參數(shù),用于聲明觸發(fā)拖動(dòng)手勢(shì)所需要的最少手指
2023-09-01 15:27:10
組合手勢(shì)中有一個(gè)手勢(shì)識(shí)別失敗時(shí),所有的手勢(shì)識(shí)別失敗。
以一個(gè)由長(zhǎng)按手勢(shì)和拖動(dòng)手勢(shì)組合而成的連續(xù)手勢(shì)為例:
在一個(gè)Column組件上綁定了translate屬性,通過(guò)修改該屬性可以設(shè)置組件的位置移動(dòng)。然后在該
2023-09-07 15:20:02
互斥識(shí)別組合手勢(shì)對(duì)應(yīng)的GestureMode為Exclusive。互斥識(shí)別組合手勢(shì)中注冊(cè)的手勢(shì)將同時(shí)進(jìn)行識(shí)別,若有一個(gè)手勢(shì)識(shí)別成功,則結(jié)束手勢(shì)識(shí)別,其他所有手勢(shì)識(shí)別失敗。
以在一個(gè)Column組件上
2023-09-11 15:01:51
并行識(shí)別組合手勢(shì)對(duì)應(yīng)的GestureMode為Parallel。并行識(shí)別組合手勢(shì)中注冊(cè)的手勢(shì)將同時(shí)進(jìn)行識(shí)別,直到所有手勢(shì)識(shí)別結(jié)束。并行識(shí)別手勢(shì)組合中的手勢(shì)進(jìn)行識(shí)別時(shí)互不影響。
以在一個(gè)Column
2023-09-08 16:17:34
描述:用于觸發(fā)拖動(dòng)手勢(shì)事件,滑動(dòng)的最小距離為5vp時(shí)拖動(dòng)手勢(shì)識(shí)別成功。Api:從API Version 7開始支持接口:PanGesture(value?: { fingers
2022-11-28 10:30:14
描述:用于觸發(fā)捏合手勢(shì),觸發(fā)捏合手勢(shì)的最少手指為2指,最大為5指,最小識(shí)別距離為3vp。Api:從API Version 7開始支持接口:PinchGesture(value?: {
2022-11-29 10:09:31
述:為組件綁定不同類型的手勢(shì)事件,并設(shè)置事件的響應(yīng)方法。Api:從API Version 7開始支持一、綁定手勢(shì)識(shí)別:通過(guò)如下屬性給組件綁定手勢(shì)識(shí)別,手勢(shì)識(shí)別成功后可以通過(guò)事件回調(diào)通知組件。名稱參數(shù)
2022-11-23 15:53:05
最新的A+G系列芯片支持通過(guò)內(nèi)嵌的 FSM功能實(shí)現(xiàn)一系列手勢(shì)識(shí)別本文檔以LSM6DSOX 為例介紹了配置要求以及FSM的實(shí)現(xiàn)流程
2023-09-06 08:05:00
、逆時(shí)針以及揮動(dòng)的手勢(shì)動(dòng)作識(shí)別、模塊以i2c通信,傳感器功能很強(qiáng)大,更詳細(xì)模塊說(shuō)明的可參考數(shù)據(jù)手冊(cè)。手冊(cè)過(guò)大無(wú)法上傳附件,需要可私信我,我做了pdf目錄標(biāo)簽,方便定位查看。手勢(shì)傳感器可以用來(lái)做大量豐富
2022-06-06 18:01:13
新人小白想知道怎么用labview實(shí)現(xiàn)簡(jiǎn)單的手勢(shì)識(shí)別識(shí)別上下左右就行。哪位大神能給講講
2015-11-02 23:36:38
項(xiàng)目名稱:基于nanopi的手勢(shì)識(shí)別試用計(jì)劃:基于nanopi硬件,通過(guò)攝像頭采集圖像,利用opencv來(lái)進(jìn)行手部動(dòng)作捕捉,達(dá)到無(wú)觸摸操控。可用于智能家居,只需利用手部動(dòng)作,就可以控制智能家具。
2017-10-11 17:05:57
申請(qǐng)理由:我是一名嵌入式軟件工程師 。 大學(xué)花了很長(zhǎng)一段時(shí)間開發(fā)一套手勢(shì)識(shí)別系統(tǒng)。該系統(tǒng)是基于Xilinx 的 Zedboard開發(fā)板。Zedboard中包含有Cotex-A9處理器 。現(xiàn)在回憶起
2015-09-23 14:54:11
高。手勢(shì)模塊說(shuō)是識(shí)別手勢(shì),只是識(shí)別特定的幾種手勢(shì),也不是真的手勢(shì),只是一種運(yùn)行的方式的識(shí)別,如果要更多,更復(fù)雜的手勢(shì),比如識(shí)別五指的形態(tài)等,還是要用攝像頭進(jìn)行圖像處理的方式識(shí)別手勢(shì)了。
2022-05-10 16:21:18
文章目錄1 簡(jiǎn)介2 實(shí)現(xiàn)效果3 使用場(chǎng)景4 參數(shù)說(shuō)明5 注意事項(xiàng)6 最后1 簡(jiǎn)介Hi,大家好,這里是丹成學(xué)長(zhǎng),今天向大家介紹一個(gè)學(xué)長(zhǎng)做的單片機(jī)項(xiàng)目基于單片機(jī)得手勢(shì)識(shí)別系統(tǒng)大家可用于 課程設(shè)計(jì) 或
2021-11-19 09:19:55
有沒有人幫忙代做電容觸控手勢(shì)識(shí)別的,只要識(shí)別幾個(gè)數(shù)字就行,有償
2019-04-09 16:45:40
ADUX1020是一款集成式光學(xué)傳感器和前端器件,能夠進(jìn)行高級(jí)單點(diǎn)手勢(shì)識(shí)別和近距檢測(cè)。光學(xué)傳感器可靈敏感測(cè)入射光的強(qiáng)度和角度。通過(guò)光學(xué)和電子的環(huán)境光過(guò)濾,它能夠在各種嘈聲環(huán)境中持續(xù)穩(wěn)定工作。該芯片能夠在多種模式下配置,以實(shí)現(xiàn)非接觸式手勢(shì)識(shí)別和控制,還能實(shí)現(xiàn)近距檢測(cè)。
2020-08-19 07:56:59
你好, 我正在嘗試使用SensorTile實(shí)現(xiàn)手勢(shì)識(shí)別,開發(fā)我的固件我開始研究BlueMicrosystem2示例,因此我能夠檢測(cè)到簡(jiǎn)單的手勢(shì)作為手腕的方向。現(xiàn)在我想要認(rèn)識(shí)一些更復(fù)雜的手勢(shì),比如
2018-09-10 17:18:56
Gesture Sensor 手勢(shì)識(shí)別傳感器識(shí)別,達(dá)到可以用手勢(shì)直觀控制小車的目的。 最終視頻中,我們的小車可以接受手勢(shì)指令:前進(jìn),后退,停止,轉(zhuǎn)向,這些指令由手勢(shì)轉(zhuǎn)化 而來(lái),并通過(guò)HC12遠(yuǎn)距離串口收發(fā)
2022-01-05 07:44:29
摘 要:本文給出了采用ADXL335加速度傳感器來(lái)采集五個(gè)手指和手背的加速度三軸信息,并通過(guò)ZigBee無(wú)線網(wǎng)絡(luò)傳輸來(lái)提取手勢(shì)特征量,同時(shí)利用BP神經(jīng)網(wǎng)絡(luò)算法進(jìn)行誤差分析來(lái)實(shí)現(xiàn)手勢(shì)識(shí)別的設(shè)計(jì)方法
2018-11-13 16:04:45
本帖最后由 mr.pengyongche 于 2013-4-30 02:57 編輯
基于DSP2812平臺(tái)及手勢(shì)識(shí)別算法實(shí)現(xiàn)的手勢(shì)電視機(jī)紅外遙控系
2012-12-14 13:39:14
手勢(shì)識(shí)別是近年來(lái)大熱的人機(jī)交互方式。因其操作方便,功能炫酷而廣泛應(yīng)用于智能手機(jī),智能穿戴,智能家居以及智能汽車等領(lǐng)域。手勢(shì)識(shí)別的發(fā)展也經(jīng)歷了幾個(gè)階段。從最初的利用穿戴設(shè)備直接檢測(cè)手、胳膊各關(guān)節(jié)的角度
2019-09-20 09:05:01
課程設(shè)計(jì)時(shí)用labview做的手勢(shì)識(shí)別匹配程序,功能不是很復(fù)雜,里面有詳細(xì)的程序思路說(shuō)明文檔
2017-03-22 14:58:51
如何使用STM32F4+MPU9150去實(shí)現(xiàn)一種神經(jīng)網(wǎng)絡(luò)識(shí)別手勢(shì)呢?其過(guò)程是怎樣的?
2021-11-19 06:38:58
如何使用STM32F4+MPU9150實(shí)現(xiàn)神經(jīng)網(wǎng)絡(luò)識(shí)別手勢(shì)?
2021-11-19 07:06:48
如何實(shí)現(xiàn)基于MEMS加速度傳感器的手勢(shì)識(shí)別系統(tǒng)的設(shè)計(jì)?
2021-12-20 07:55:13
如何實(shí)現(xiàn)基于R2329-AIPU的動(dòng)態(tài)手勢(shì)識(shí)別及實(shí)機(jī)部署運(yùn)行?
2021-12-29 06:16:28
主流的手勢(shì)識(shí)別方法及其原理是什么?各種手勢(shì)識(shí)別方法的優(yōu)缺點(diǎn)是什么?都是手勢(shì)識(shí)別有什么區(qū)別嗎?如何用無(wú)源傳感器PIR搭建屬于自己的手勢(shì)識(shí)別模塊?
2021-07-04 07:45:57
如何設(shè)計(jì)一個(gè)手勢(shì)識(shí)別裝置?
2021-11-12 06:56:04
過(guò)程中的變化以及周圍環(huán)境的干擾都會(huì)影響到手勢(shì)的識(shí)別和理解,因此手勢(shì)識(shí)別是計(jì)算機(jī)視覺和人機(jī)交互領(lǐng)域中的重要問(wèn)題,如何將這種交互方式更好地在嵌入式系統(tǒng)中應(yīng)用更是一個(gè)富有挑戰(zhàn)性的工作。
2020-03-31 08:21:35
Microchip MGC3030 手勢(shì)控制器是一個(gè)電場(chǎng)感測(cè)片上系統(tǒng) (SoC),板載處理功能帶有 3D 手勢(shì)識(shí)別和手部位置追蹤。它采用 Microchip 的 GestIC? 技術(shù),采用約 100
2018-07-03 09:40:31
有人會(huì)用psoc做電容觸摸手勢(shì)識(shí)別嗎,功能很單一只要求能識(shí)別幾個(gè)數(shù)字就行,可以給錢
2019-04-09 16:20:25
,用stm32做手勢(shì)識(shí)別,當(dāng)手和臉同時(shí)被攝像頭拍到時(shí),無(wú)法將臉去掉,只留下手,所以下一步手勢(shì)識(shí)別就無(wú)從談起,請(qǐng)高人指點(diǎn)
2018-08-30 09:59:31
紅外手勢(shì)識(shí)別方案,適用于多種領(lǐng)域,如音響,可實(shí)現(xiàn)通過(guò)手勢(shì)識(shí)別暫停,開始,上一首,下一首;智能家居,如電動(dòng)窗簾,感應(yīng)馬桶等;電子產(chǎn)品,如臺(tái)燈開關(guān)以及亮度的調(diào)節(jié)。需要了解的請(qǐng)加QQ 2251991793電話***
2014-09-17 16:31:11
紅外手勢(shì)識(shí)別方案,適用于多種領(lǐng)域,如音響,可實(shí)現(xiàn)通過(guò)手勢(shì)識(shí)別暫停,開始,上一首,下一首;智能家居,如電動(dòng)窗簾,感應(yīng)馬桶等;電子產(chǎn)品,如臺(tái)燈開關(guān)以及亮度的調(diào)節(jié)。
2014-08-27 16:37:53
歐姆龍宣布開發(fā)出了可識(shí)別手部動(dòng)作的“手勢(shì)識(shí)別技術(shù)”,可同時(shí)識(shí)別手部或手指的位置、形狀及動(dòng)作。據(jù)介紹,該技術(shù)可用于利用手勢(shì)操作電視及個(gè)人電腦等用途。
2012-05-30 11:52:571890 歐姆龍開發(fā)出了可從攝像機(jī)拍攝的人上半身的視頻等來(lái)識(shí)別此人手勢(shì)的“手勢(shì)識(shí)別技術(shù)”。結(jié)合使用了面部識(shí)別技術(shù)以及識(shí)別手掌、手指的位置、形狀及動(dòng)作的技術(shù)。
2012-05-31 09:09:491954 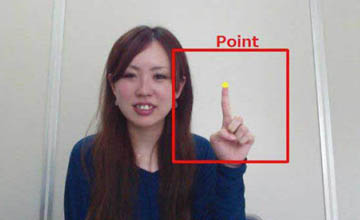
基于無(wú)監(jiān)督特征學(xué)習(xí)的手勢(shì)識(shí)別方法_陶美平
2017-01-03 17:41:58 1
1 基于Kinect和變形雅可比_傅里葉矩的手勢(shì)識(shí)別_劉亞瑞
2017-03-19 19:08:350 20世紀(jì)60年代以來(lái),隨著微型計(jì)算機(jī)技術(shù)和新的電子技術(shù)的不斷發(fā)展,手勢(shì)識(shí)別作為一種應(yīng)用十分廣泛的人機(jī)交互技術(shù)也取得了很大的進(jìn)步。目前手勢(shì)識(shí)別領(lǐng)域研究較成熟的裝置主要為視頻捕捉型,這種類型已商用于娛樂(lè)
2017-11-01 17:49:207 基于 RGB-D( RGB-Depth)的靜態(tài)手勢(shì)識(shí)別的速度高于其動(dòng)態(tài)手勢(shì)識(shí)別,但是存在冗余手勢(shì)和重復(fù)手勢(shì)而導(dǎo)致識(shí)別準(zhǔn)確性不高的問(wèn)題。針對(duì)該問(wèn)題,提出了一種基于加鎖機(jī)制的靜態(tài)手勢(shì)識(shí)別方法來(lái)識(shí)別運(yùn)動(dòng)
2017-12-15 13:34:230 針對(duì)類膚色信息或復(fù)雜背景的影響,難以通過(guò)手勢(shì)分割得到精確手勢(shì)輪廓而對(duì)后期手勢(shì)識(shí)別率與實(shí)時(shí)交互的影響,提出了一種基于特征包支持向量機(jī)( BOF-SVM)的手勢(shì)識(shí)別方法。采用SIFT算法提取手勢(shì)圖像局部
2018-02-24 15:23:211 在全球范圍內(nèi),“老牌”的Leap Motion和“新生”的Untouch(未動(dòng)科技)、uSens(凌感科技)、微動(dòng)、京龍睿信、車蘿卜、光暈Halo以及極魚科技等多家手勢(shì)識(shí)別公司算是中國(guó)代表公司。
2018-03-18 10:18:005671 本文開始闡述了微動(dòng)開關(guān)的定義和微動(dòng)開關(guān)的分類,其次闡述了微動(dòng)開關(guān)的作用或用途,最后闡述了微動(dòng)開關(guān)操作方法及操作注意事項(xiàng)。
2018-03-23 14:40:3640052 本文開始闡述了微動(dòng)開關(guān)原理,其次介紹了微動(dòng)開關(guān)種類以及微動(dòng)開關(guān)接線方法,最后介紹了微動(dòng)開關(guān)的用途。
2018-03-23 15:01:3264854 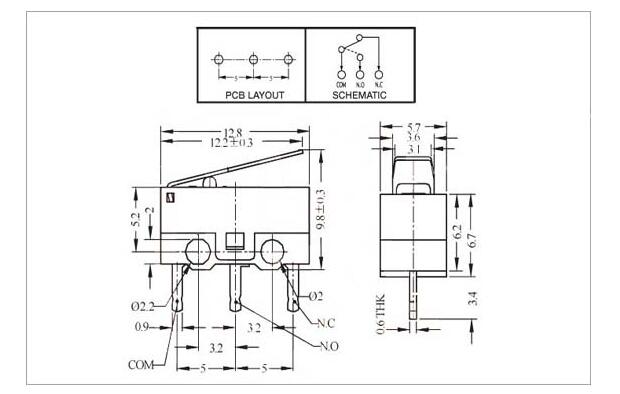
本項(xiàng)目在python 2.7上使用opencv實(shí)現(xiàn)了一個(gè)手勢(shì)識(shí)別和手勢(shì)識(shí)別系統(tǒng)。一種基于直方圖的方法被用來(lái)從背景圖像中分離出一只手。背景消除技術(shù)被用來(lái)獲得最佳的結(jié)果。然后對(duì)檢測(cè)到的手進(jìn)行處理和建模
2019-04-28 08:00:0012 距離微軟首次推出Surface已經(jīng)有差不多七年的時(shí)間了,經(jīng)過(guò)了多款產(chǎn)品的迭代,輕薄、便攜已經(jīng)成為Surface系列的標(biāo)簽之一,如今,Surface系列已經(jīng)延伸出幾條不同類型的產(chǎn)品線,去年7月份,定位入門的Surface Go的發(fā)布,不僅機(jī)身更小更輕,也給用戶們帶來(lái)了更接地氣的選擇。
2019-08-23 08:36:276424 谷歌新成果AI手勢(shì)識(shí)別追蹤技術(shù)公布
2019-08-23 15:17:033818 人工智能是接地氣的科技力量,面向需求、面向數(shù)字經(jīng)濟(jì)、面向高質(zhì)量發(fā)展,才能更好激發(fā)正能量。
2019-10-18 16:53:22439 投石科技手勢(shì)識(shí)別發(fā)光圈互動(dòng)裝置是通過(guò)一種微波技術(shù),感知一定距離內(nèi)的生物體活動(dòng),從而實(shí)現(xiàn)在待機(jī)狀態(tài)下,人體感應(yīng)器裝置從呼吸燈狀態(tài)變?yōu)槌A翣顟B(tài)。 手勢(shì)識(shí)別發(fā)光圈 投石科技手勢(shì)識(shí)別發(fā)光圈互動(dòng)裝置的雙眼
2020-03-26 14:42:11912 DFRobot 3D手勢(shì)識(shí)別傳感器是一款集成3D手勢(shì)識(shí)別和運(yùn)動(dòng)跟蹤為一體的交互式傳感器,傳感器可以在有效范圍內(nèi)識(shí)別手指的順時(shí)針/逆時(shí)針轉(zhuǎn)動(dòng)方向和手指的運(yùn)動(dòng)方向等。
2020-01-03 15:40:211691 
這款是一款集成了手勢(shì)識(shí)別功能和觸摸識(shí)別功能的傳感器模塊,它的最大檢測(cè)距離為30cm,距離0-30cm可調(diào)。
2020-01-07 11:21:572066 
在計(jì)算機(jī)科學(xué)中,手勢(shì)識(shí)別是通過(guò)數(shù)學(xué)算法來(lái)識(shí)別人類手勢(shì)的一個(gè)議題。手勢(shì)識(shí)別可以來(lái)自人的身體各部位的運(yùn)動(dòng),但一般是指臉部和手的運(yùn)動(dòng)。用戶可以使用簡(jiǎn)單的手勢(shì)來(lái)控制或與設(shè)備交互,讓計(jì)算機(jī)理解人類的行為。其核心技術(shù)為手勢(shì)分割、手勢(shì)分析以及手勢(shì)識(shí)別。
2020-06-30 12:24:002505 2020年,新冠疫情席卷全球,“保持距離”成為了防疫的必要措施,這讓許多主打“零接觸”的產(chǎn)品得到消費(fèi)者青睞,如手勢(shì)感應(yīng)泡沫劑、手勢(shì)感應(yīng)水龍頭、手勢(shì)感應(yīng)開關(guān)、手勢(shì)識(shí)別門鎖等。
2020-10-22 09:23:444964 的代名詞。但如果讓你說(shuō)出今年大疆給你留下最深印象的產(chǎn)品,絕大多數(shù)人想到的都是它今年新發(fā)布的手持穩(wěn)定器 DJI RS 2和 DJI RSC 2,而不是無(wú)人機(jī)。DJI RS 2/RSC 2 如此成功,以至于有用戶開玩笑,說(shuō)大疆變得“接地氣”了。 接地氣,說(shuō)的不僅僅是大疆產(chǎn)
2021-01-11 11:09:052077 據(jù)外媒 appleinsider 報(bào)道,蘋果最新曝光了一份識(shí)別交通手勢(shì)的新專利,專利顯示,Apple Car 可通過(guò)傳感器識(shí)別引導(dǎo)人員的交通手勢(shì)。
2021-02-03 09:31:111635 手語(yǔ)識(shí)別的目的就是通過(guò)計(jì)算機(jī)提供一種有效的、準(zhǔn)確的機(jī)制將聾啞人常用的手語(yǔ)手勢(shì)識(shí)別出來(lái),使得他們與健全人之間的交互變得更方便、快捷。同時(shí),手語(yǔ)識(shí)別的應(yīng)用還可以提供更自然的人機(jī)交互方式,方便聾啞人
2021-03-26 16:42:133973 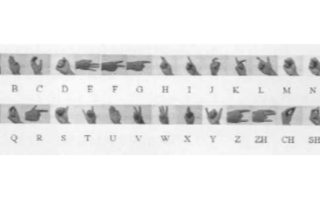
基于Kinect傳感器的動(dòng)態(tài)手勢(shì)識(shí)別方法
2021-06-23 16:44:5918 文章目錄1 簡(jiǎn)介2 實(shí)現(xiàn)效果3 使用場(chǎng)景4 參數(shù)說(shuō)明5 注意事項(xiàng)6 最后1 簡(jiǎn)介Hi,大家好,這里是丹成學(xué)長(zhǎng),今天向大家介紹一個(gè)學(xué)長(zhǎng)做的單片機(jī)項(xiàng)目基于單片機(jī)得手勢(shì)識(shí)別系統(tǒng)大家可用于 課程設(shè)計(jì)
2021-11-12 17:21:0021 ????????手勢(shì)識(shí)別是計(jì)算機(jī)科學(xué)和語(yǔ)言技術(shù)領(lǐng)域的一個(gè)研究課題,其目的是通過(guò)數(shù)學(xué)算法解析人類手勢(shì)。它可以在機(jī)器和人類之間搭建更高效的溝通橋梁,讓生活更豐富多彩、更智能化。人們?cè)诨趫D像/視頻的手勢(shì)
2022-01-17 14:17:443011 電子發(fā)燒友網(wǎng)站提供《手勢(shì)識(shí)別:用于8位微控制器的TinyML.zip》資料免費(fèi)下載
2022-10-24 10:52:183 電子發(fā)燒友網(wǎng)站提供《TensorFlow手勢(shì)識(shí)別樹莓派開源.zip》資料免費(fèi)下載
2022-11-09 09:27:171 2020年,新冠疫情席卷全球,“保持距離”成為了防疫的必要措施,這讓許多主打“零接觸”的產(chǎn)品得到消費(fèi)者青睞,如手勢(shì)感應(yīng)泡沫劑、手勢(shì)感應(yīng)水龍頭、手勢(shì)感應(yīng)開關(guān)、手勢(shì)識(shí)別門鎖等。 手勢(shì)識(shí)別的目的不應(yīng)該
2023-04-10 15:27:10697 
在當(dāng)今數(shù)字化時(shí)代,我們離不開計(jì)算機(jī)、手機(jī)和其他電子設(shè)備。與此同時(shí),手勢(shì)識(shí)別技術(shù)也越來(lái)越受關(guān)注。手勢(shì)是我們與生俱來(lái)的一種表達(dá)方式,通過(guò)它們可以傳達(dá)思想和情感。因此,手勢(shì)識(shí)別技術(shù)也變得越來(lái)越重要。而在
2023-04-13 16:36:25873 手勢(shì)識(shí)別是現(xiàn)代科技發(fā)展中的一個(gè)熱門話題。通過(guò)使用攝像頭、傳感器等設(shè)備來(lái)識(shí)別人類的特定手勢(shì),可以為人們的日常生活、醫(yī)學(xué)、汽車駕駛等方面帶來(lái)便捷和安全。本文將會(huì)詳細(xì)從幾個(gè)方面探討手勢(shì)識(shí)別的應(yīng)用和發(fā)展
2023-04-13 16:49:432330 手勢(shì)識(shí)別數(shù)據(jù)集是指用于測(cè)試、訓(xùn)練和開發(fā)手勢(shì)識(shí)別算法的數(shù)據(jù)集。隨著手勢(shì)識(shí)別技術(shù)的不斷發(fā)展,越來(lái)越多的企業(yè)和研究機(jī)構(gòu)需要大量的手勢(shì)識(shí)別數(shù)據(jù)集來(lái)訓(xùn)練和評(píng)估他們的算法。然而,由于手勢(shì)數(shù)據(jù)集的收集、標(biāo)注和維護(hù)
2023-04-14 17:31:33859 手勢(shì)識(shí)別:解放雙手,開啟智能時(shí)代 手勢(shì)識(shí)別技術(shù)是近年來(lái)備受矚目的人工智能技術(shù)之一,它的應(yīng)用范圍非常廣泛,可以應(yīng)用于各種場(chǎng)景,例如智能家居、機(jī)器人、自動(dòng)駕駛等等。而手勢(shì)識(shí)別技術(shù)之所以受到如此關(guān)注
2023-05-12 17:47:06963 電子發(fā)燒友網(wǎng)站提供《基于ResNet的手勢(shì)識(shí)別邊緣計(jì)算項(xiàng)目.zip》資料免費(fèi)下載
2023-06-14 14:53:580 手勢(shì)識(shí)別技術(shù)是一種通過(guò)計(jì)算機(jī)視覺和人工智能技術(shù)來(lái)分析和識(shí)別人類手勢(shì)動(dòng)作的技術(shù)。它主要利用傳感器、攝像頭等設(shè)備捕捉手勢(shì)信息,然后通過(guò)算法對(duì)捕捉到的手勢(shì)信息進(jìn)行處理和分析,從而實(shí)現(xiàn)對(duì)手勢(shì)的識(shí)別和判斷
2023-06-14 18:12:261097 手勢(shì)識(shí)別技術(shù)在實(shí)現(xiàn)過(guò)程中面臨著一些挑戰(zhàn)和問(wèn)題。 首先,手勢(shì)識(shí)別技術(shù)需要處理大量的手勢(shì)信息,而這些手勢(shì)信息的處理和分析需要耗費(fèi)大量的計(jì)算資源,因此如何提高計(jì)算效率是手勢(shì)識(shí)別技術(shù)需要解決的問(wèn)題之一。其次
2023-06-14 18:27:33571 智能手勢(shì)化妝鏡手勢(shì)識(shí)別模組芯片底部填充膠應(yīng)用案例由漢思新材料提供客戶是一家芯片設(shè)計(jì)方案公司,專注研發(fā)芯片十余年,擁有國(guó)內(nèi)一流的專業(yè)技術(shù)團(tuán)隊(duì),為客戶提供優(yōu)質(zhì)的產(chǎn)品和解決方案.目前產(chǎn)品涵蓋:Sensor
2023-04-07 05:00:00470 
電子發(fā)燒友網(wǎng)站提供《使用手勢(shì)識(shí)別的游戲控制.zip》資料免費(fèi)下載
2023-06-25 15:32:150 車載手勢(shì)識(shí)別技術(shù)是一種利用計(jì)算機(jī)視覺和人工智能技術(shù)來(lái)識(shí)別和理解駕駛員手勢(shì)的技術(shù)。該技術(shù)通過(guò)使用傳感器、攝像頭等設(shè)備捕捉駕駛員的手勢(shì)動(dòng)作,然后通過(guò)算法對(duì)捕捉到的手勢(shì)動(dòng)作進(jìn)行識(shí)別和分析,以實(shí)現(xiàn)車輛控制
2023-06-27 18:09:11700 首先,車載手勢(shì)識(shí)別技術(shù)需要具備高準(zhǔn)確率和實(shí)時(shí)性,以滿足駕駛員的需求。然而,在實(shí)際應(yīng)用中,受到多種因素的影響,如光照、背景、手勢(shì)速度等,車載手勢(shì)識(shí)別技術(shù)的準(zhǔn)確率和實(shí)時(shí)性往往受到限制。其次,車載手勢(shì)識(shí)別
2023-06-27 18:25:21290 電子發(fā)燒友網(wǎng)站提供《手勢(shì)識(shí)別功能開源案例.zip》資料免費(fèi)下載
2023-07-11 17:05:212 帕克西手勢(shì)識(shí)別是通過(guò)普通PC/手機(jī)攝像頭,快速檢測(cè)并返回圖片或視頻中的手勢(shì)/動(dòng)作,深度解析用戶的行為信息,提供基于普通攝像頭的全新手勢(shì)交互無(wú)限可能。
2023-11-27 15:05:05207 作者:Tyler Ray 簡(jiǎn)介 ADUX1020是一款集成式光學(xué)傳感器和前端器件,能夠進(jìn)行高級(jí)單點(diǎn)手勢(shì)識(shí)別和近距檢測(cè)。光學(xué)傳感器可靈敏感測(cè)入射光的強(qiáng)度和角度。通過(guò)光學(xué)和電子的環(huán)境光過(guò)濾,它能夠在各種
2023-11-28 16:26:300
 電子發(fā)燒友App
電子發(fā)燒友App














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論