電機(jī)位置編碼器廣泛用于伺服驅(qū)動(dòng)器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會(huì)帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對(duì)這些挑戰(zhàn),筆者將以
2018-05-16 08:43:56 8250
8250 對(duì)步進(jìn)電機(jī)的控制通常使用PWM控制,改變頻率來控制速度,然后統(tǒng)計(jì)脈沖個(gè)數(shù)知道電機(jī)當(dāng)前位置,可以很容易實(shí)現(xiàn)加減速規(guī)劃,或者不考慮加減速平穩(wěn)性,直接以小于最大啟動(dòng)速度的速度啟動(dòng),發(fā)完給定個(gè)脈沖后直接
2022-10-14 11:28:383482 ? ?1.?最常見的電機(jī)位置傳感器有哪些? 用于電機(jī)的最先進(jìn)的位置傳感器被認(rèn)為是基于旋轉(zhuǎn)變壓器(resolver-based)和編碼器(encoder-based)的傳感器。 1.1基于旋轉(zhuǎn)
2023-08-30 09:09:022865 
步進(jìn)電機(jī)基本上以開環(huán)電路驅(qū)動(dòng),用于位置控制 。換句話說,步進(jìn)電機(jī)以外的電機(jī)尤其是高精度的步進(jìn)電機(jī)之外并沒有做開環(huán)控制定位的,而用開環(huán)電路驅(qū)動(dòng)的電機(jī)只有步進(jìn)電機(jī)。
2023-09-22 10:37:59680 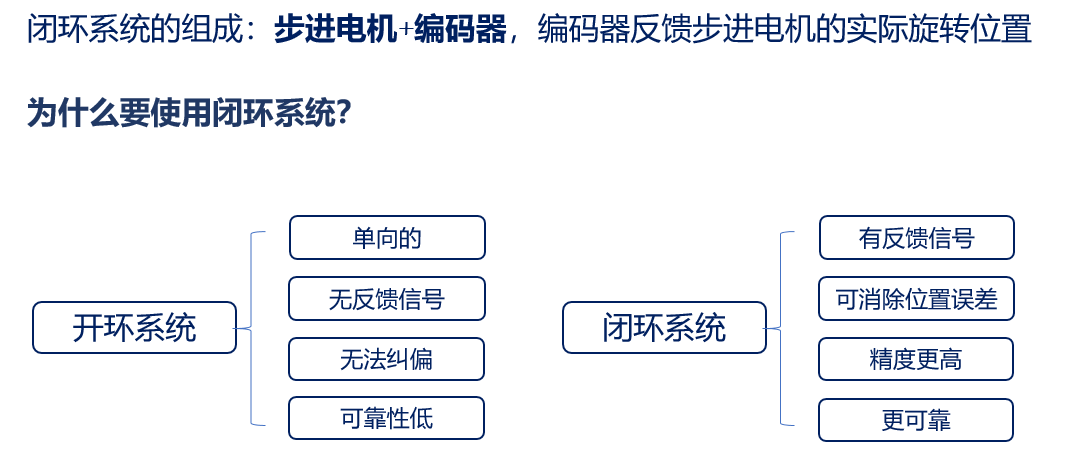
一文帶你了解步進(jìn)電機(jī)的相關(guān)知識(shí):相、線、極性和步進(jìn)方式2017-09-07 16:45這里不說步進(jìn)電機(jī)的 “細(xì)分” 實(shí)驗(yàn),只說一下有關(guān)步進(jìn)電機(jī)的基礎(chǔ)概念以及步進(jìn)電機(jī)的三種工作方式——單拍、雙拍、單雙
2021-07-08 06:48:29
如題,定位系統(tǒng)為步進(jìn)電機(jī)+光柵尺的全閉環(huán)系統(tǒng),麻煩問下各位大佬位置補(bǔ)償算法一般都采用哪些呢?PID嗎?重復(fù)精度需要提高到10幾微米左右,求助求助
2024-01-09 08:01:10
應(yīng)用,但步進(jìn)電機(jī)并不能象普通的直流電機(jī),交流電機(jī)在常規(guī)下使用。它必須由雙環(huán)形脈沖信號(hào)、功率驅(qū)動(dòng)電路等組成控制系統(tǒng)方可使用。因此也經(jīng)常會(huì)出現(xiàn)一些定位不準(zhǔn)的故障。步進(jìn)電機(jī)定位不準(zhǔn)一般由以下幾方面原因引起:1、 改變方向時(shí)丟脈沖,表現(xiàn)為往任何一個(gè)方向都準(zhǔn),但一改變方向就累計(jì)偏差,并且次數(shù)越多偏得越多;...
2021-07-06 07:22:38
帶編碼器的步進(jìn)電機(jī)只是提高了一些性能,高精度定位方面是提高了,力矩方面沒有得到提升,基本可以忽略,而且照樣會(huì)丟步。伺服電機(jī)是必須有編碼器的,如果一個(gè)伺服電機(jī)沒有編碼器,這個(gè)電機(jī)不可能是伺服電機(jī)。在
2021-06-28 08:02:48
帶編碼器的步進(jìn)電機(jī),電機(jī)在工作的情況下有時(shí)會(huì)出現(xiàn)電機(jī)自身的步數(shù)和編碼器測(cè)得的步數(shù)不一致的情況!以編碼器測(cè)得的步數(shù)和電機(jī)自身的步數(shù)對(duì)比,調(diào)整電機(jī)步數(shù),有時(shí)會(huì)出現(xiàn)調(diào)整后的電機(jī)位置與預(yù)設(shè)位置不符現(xiàn)象,(步進(jìn)電機(jī)步數(shù)準(zhǔn)確,編碼器不準(zhǔn)確?)問下有什么辦法解決沒?
2018-05-09 22:37:31
步進(jìn)電機(jī)基礎(chǔ)(8.2)-步進(jìn)電機(jī)的問題解決方案-降低振動(dòng)噪音的解決方法前言基本信息前言說明8.2 降低振動(dòng)噪音的解決方法1. 與驅(qū)動(dòng)電路有關(guān)的方法2. 與電機(jī)有關(guān)的方法降低振動(dòng)和噪音效果好的方法如下
2021-07-08 09:40:18
。解決方法: 通過一個(gè)加速和減速過程,即以較低的速度起動(dòng),而后逐漸加速到某一速度運(yùn)行,再逐漸減速直至停止。原因三:步進(jìn)電動(dòng)機(jī)產(chǎn)生共振共振也是引起丟步的一個(gè)原因。步進(jìn)電機(jī)處于連續(xù)運(yùn)行狀態(tài)時(shí),如果控制脈沖
2023-04-15 16:33:58
步進(jìn)電機(jī)基礎(chǔ)(8.1)-步進(jìn)電機(jī)的問題解決方案-增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法前言基本信息前言說明8.1 增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法1 . 步進(jìn)電機(jī)在低速時(shí)增加轉(zhuǎn)矩的方法1) 選擇步距角小的步進(jìn)電機(jī)2) 雙極型
2021-07-07 07:29:39
步進(jìn)電機(jī)最簡(jiǎn)單的驅(qū)動(dòng)方法,了解四軸步進(jìn)電機(jī)驅(qū)動(dòng)器原理 四軸步進(jìn)電機(jī)驅(qū)動(dòng)器原理-簡(jiǎn)介四軸步進(jìn)電機(jī)驅(qū)動(dòng)器,其實(shí)就是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。首先步進(jìn)驅(qū)動(dòng)器會(huì)接收到一個(gè)脈沖信號(hào),然后它按設(shè)定
2021-07-12 08:18:40
”是不言而喻的。 LIN步進(jìn)電機(jī)驅(qū)動(dòng)器解決方案 步進(jìn)電機(jī)驅(qū)動(dòng)器的細(xì)分越高,步進(jìn)電機(jī)的精度就越高? 這是一種錯(cuò)誤的觀念。比如步進(jìn)電機(jī)驅(qū)動(dòng)器細(xì)分較高的可以達(dá)到60000個(gè)脈沖一轉(zhuǎn),而步進(jìn)電機(jī)實(shí)際是無(wú)法分辨這個(gè)
2020-06-25 08:00:00
是以固定的角度(步距角)一步一步運(yùn)行的,故稱步進(jìn)電機(jī)。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,因此具有較高的定位精度。步進(jìn)驅(qū)動(dòng)器(步進(jìn)驅(qū)動(dòng)電源)向電動(dòng)機(jī)繞組提供脈沖電流,步進(jìn)電動(dòng)機(jī)的運(yùn)行性能決定于電動(dòng)機(jī)與步進(jìn)驅(qū)動(dòng)器的良好配合。
2021-06-29 08:56:51
電機(jī)位置信號(hào)的重要性在永磁同步電機(jī)FOC控制算法中,需要用到一個(gè)非常重要的物理量是電機(jī)的位置信號(hào)。這個(gè)位置信號(hào)到底有多重要呢?還是用數(shù)據(jù)來說話吧。筆者搭建了一個(gè)電機(jī)的電流環(huán)仿真模型,固定電機(jī)轉(zhuǎn)速
2021-08-27 07:36:41
我要做電機(jī)位置隨動(dòng)的仿真,就是模擬信號(hào)轉(zhuǎn)化數(shù)字量,然后電機(jī)根據(jù)數(shù)字指令轉(zhuǎn)相應(yīng)角度(位置),電機(jī)用的是位置編碼電機(jī)就是可以發(fā)出脈沖數(shù)的那種,,真得很急用啊 ,,有沒有大神幫幫忙,或者給我個(gè)思路也可以。!!!!
2014-09-09 01:22:09
27VDC。四、工作量要求1、完成控制系統(tǒng)原理圖設(shè)計(jì);2、完成直流伺服電機(jī)位置控制系統(tǒng)建模,PID控制器的設(shè)計(jì),基于LABVIEW的實(shí)時(shí)控制軟件開發(fā)及實(shí)驗(yàn),完成仿真結(jié)果與實(shí)驗(yàn)結(jié)果的對(duì)比分析,并提出改進(jìn)措施
2019-04-02 09:40:03
控制步進(jìn)電機(jī)位置、速度的實(shí)時(shí)軟件設(shè)計(jì)。實(shí)驗(yàn)用設(shè)備:1.具有ISA總線插槽和USB接口的PC系列微型計(jì)算機(jī)。2.23HS2001型步進(jìn)電機(jī)。3.SH-2H042Ma步進(jìn)電機(jī)驅(qū)動(dòng)器。4.24V直流穩(wěn)壓電源。...
2021-09-10 06:21:45
?3,如果保證電機(jī)位置/電流采集發(fā)生的同時(shí)性;4,如果電機(jī)位置/電流采集不是同一時(shí)刻的,對(duì)控制精度到底有多大的影響,如何衡量呢?5,電機(jī)位置/電流采集會(huì)帶來多少Delay 呢?下圖是一個(gè)電機(jī)位置/電流
2016-10-24 20:45:11
);// 等待15ms讓舵機(jī)到達(dá)指定位置 } for(pos = 0; pos < 90; pos += 1) { // 從0度到180度運(yùn)動(dòng)// 每次步進(jìn)一度myservo.write(pos
2016-06-24 23:45:10
編碼器能夠滿足高精度、高可靠性、低成本的設(shè)計(jì)要求。那么將AS5040磁旋轉(zhuǎn)編碼器應(yīng)用于永磁同步電機(jī)位置檢測(cè)時(shí),需要解決兩個(gè)問題:一是磁旋轉(zhuǎn)編碼器安裝位置初始定位,即確定編碼器輸出的位置信號(hào)與電機(jī)實(shí)際
2021-09-22 09:41:15
兩個(gè)步進(jìn)電機(jī)用一個(gè)定時(shí)器發(fā)生脈沖,要讓一個(gè)轉(zhuǎn)動(dòng)一定位置,再讓另一個(gè)轉(zhuǎn)動(dòng)一定位置,一個(gè)電機(jī)轉(zhuǎn)動(dòng)的不錯(cuò),兩個(gè)電機(jī),位置就慢慢不對(duì)了,是不是有干擾什么的?
2023-10-25 07:17:50
兩個(gè)步進(jìn)電機(jī)用一個(gè)定時(shí)器發(fā)生脈沖,要讓一個(gè)轉(zhuǎn)動(dòng)一定位置,再讓另一個(gè)轉(zhuǎn)動(dòng)一定位置,一個(gè)電機(jī)轉(zhuǎn)動(dòng)的不錯(cuò),兩個(gè)電機(jī),位置就慢慢不對(duì)了,是不是有干擾什么的???
2019-04-03 07:39:29
步進(jìn)電機(jī)基礎(chǔ)(8.3)-步進(jìn)電機(jī)的問題解決方案-改善暫態(tài)特性的解決方法前言基本信息前言說明8.3 改善暫態(tài)特性的解決方法1. 利用阻尼器的改善2 . 利用驅(qū)動(dòng)電路的改善(1) 半步進(jìn)1-2相激磁
2021-07-07 06:27:00
閉環(huán)控制步進(jìn)電機(jī)是控制論的一個(gè)基本概念。指作為被控的輸出以一定方式返回到作為控制的輸入端,并對(duì)輸入端施加控制影響的一種控制關(guān)系。步進(jìn)電動(dòng)機(jī)的閉環(huán)控制是采用位置反饋和 速度反饋來確定與轉(zhuǎn)子位置相適應(yīng)
2018-08-30 10:41:23
位置檢測(cè)手段間的各類伺服系統(tǒng)進(jìn)行初始定位過程中,大多運(yùn)用到霍爾元件檢測(cè)轉(zhuǎn)子初始位置”,故霍爾元件安裝位置檢測(cè)成為何服系統(tǒng)配裝電機(jī)必須經(jīng)歷的步驟。由于永磁同步電機(jī)伺服電機(jī)系統(tǒng)能夠向智能化方向發(fā)展,有必要
2020-06-30 10:28:19
關(guān)于STM32PID閉環(huán)控制智能電機(jī)位置知識(shí)點(diǎn)你想知道的都在
2021-10-20 06:55:28
二次 函數(shù)增加。這種加速方法對(duì)步進(jìn)電機(jī)運(yùn)行十分有利,因?yàn)閱?dòng)時(shí),加速度平緩, 一旦步進(jìn)電機(jī)具有一定的速度,加速度增加很快。這樣一方面使加速度平穩(wěn)過渡, 有利于提高機(jī)器的定位精度,另一方面可以縮短加速
2018-10-31 11:13:25
怎么才能實(shí)現(xiàn)高精度的步進(jìn)電機(jī)位置控制
2023-10-13 07:40:50
我現(xiàn)在搞異步電機(jī)位置控制。請(qǐng)問高手,電機(jī)精確定位硬件上有什么特殊要求嗎?謝謝!我電機(jī)上接了碼盤,可是電機(jī)有慣性,發(fā)送停止命令,電機(jī)還要再轉(zhuǎn)一下才停。怎么解決?謝謝!
2018-11-22 10:04:51
供電,但由于慣性,電機(jī)總是還會(huì)旋轉(zhuǎn)一段距離,累計(jì)誤差很大,請(qǐng)問有什么更好的方法來控制電機(jī)位置嗎,如何解決電機(jī)慣性的問題 這里不對(duì)轉(zhuǎn)速有任何要求,只要求位置精確
2020-03-13 05:20:31
用于測(cè)量步進(jìn)電機(jī)旋轉(zhuǎn)精度的搞定度絕對(duì)位置旋轉(zhuǎn)編碼器BH38 也在 寫文章-CSDN博客 進(jìn)行了測(cè)試。在本實(shí)驗(yàn)中,將根據(jù) 使用高精度旋轉(zhuǎn)編碼器BH60測(cè)量步進(jìn)電機(jī)轉(zhuǎn)動(dòng)角度 文章中的方法對(duì)本款測(cè)試步進(jìn)電機(jī)的旋轉(zhuǎn)精度進(jìn)行測(cè)量。 01初步運(yùn)動(dòng)測(cè)試1.實(shí)驗(yàn)方案1實(shí)驗(yàn)方案采用 42HS48EIS步進(jìn)
2021-07-07 08:04:16
對(duì)拓達(dá)伺服步進(jìn)電機(jī)的頻響也有了確定的控制,因?yàn)?b class="flag-6" style="color: red">位置環(huán)不能精確控制伺服步進(jìn)電機(jī)以何種速度和加速度達(dá)到預(yù)定位置,而速度環(huán)和加速度環(huán)可以。所以要根據(jù)需求選擇閉環(huán)控制策略。一般來說高精度的定位控制不光要用位置環(huán)還要合并使用速度環(huán)和加速度環(huán)來控制。
2018-08-25 10:05:53
。AS5040磁旋轉(zhuǎn)編碼器能夠滿足高精度、高可靠性、低成本的設(shè)計(jì)要求。 那么將AS5040磁旋轉(zhuǎn)編碼器應(yīng)用于永磁同步電機(jī)位置檢測(cè)時(shí),需要解決兩個(gè)問題:一是磁旋轉(zhuǎn)編碼器安裝位置初始定位,即確定編碼器輸出的位置
2023-03-09 15:30:26
如題無(wú)刷電機(jī)做位置伺服控制:無(wú)刷直流電機(jī)的極對(duì)數(shù)為1對(duì),電機(jī)的旋轉(zhuǎn)精度是不是正負(fù)60度。如果想要提高定位精度是不是選用極對(duì)數(shù)高的無(wú)刷機(jī)做位置伺服控制
2015-11-10 21:29:08
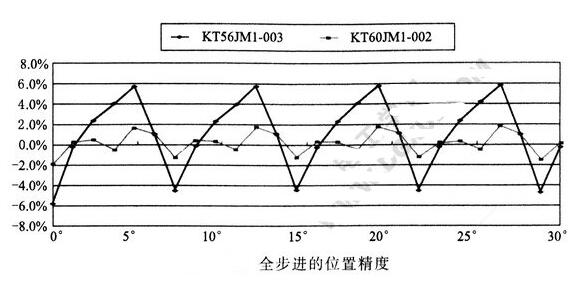
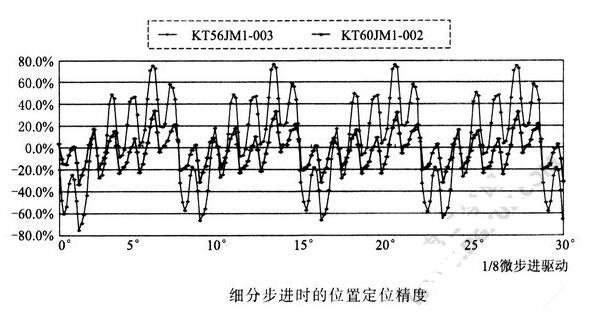
步進(jìn)電機(jī)基礎(chǔ)(8.4)-步進(jìn)電機(jī)的問題解決方案-位置定位精度的解決方法前言基本信息前言說明8.2 位置定位精度的解決方法1 . 驅(qū)動(dòng)電路的改善(1) 額定電壓(電流)驅(qū)動(dòng):(2) 2相激磁驅(qū)動(dòng):(3
2021-07-07 07:16:07
是計(jì)算步進(jìn)電機(jī)負(fù)載指針實(shí)際位置與指定位置的偏差,并實(shí)時(shí)顯示位置變化曲線,設(shè)計(jì)方法:實(shí)際位置采樣的電壓值輸入此模塊后,先乘以16/5(步進(jìn)電機(jī)負(fù)載的線位移范圍為0~16 em,對(duì)應(yīng)于采集電壓的0~5 V
2019-04-09 09:40:01
直線電機(jī)定位精度和重復(fù)定位精度,直線電機(jī)模組通常用于自動(dòng)化機(jī)械和設(shè)備上,因此我們必須嚴(yán)格控制精度的變化,并始終進(jìn)行精度測(cè)量。但是,精度測(cè)量的原理是什么?您對(duì)定位精度了解多少?讓我們帶大家一起學(xué)習(xí)!一
2021-07-12 06:56:34
我想用類似紅外對(duì)管電路控制步進(jìn)電機(jī)到達(dá)指定位置時(shí)停止,有啥好方案
2014-12-18 09:28:15
伺服電機(jī)與步進(jìn)電機(jī)定位精度上哪個(gè)更精確些?在使用上哪個(gè)操作比較簡(jiǎn)單些
2023-12-12 08:07:14
一、實(shí)驗(yàn)?zāi)康?:1. 學(xué)習(xí)和掌握步進(jìn)電機(jī)及其驅(qū)動(dòng)器的操作和使用方法 ;2. 學(xué)習(xí)和掌握步進(jìn)電機(jī)單軸定位控制方法 ; 3. 了解步進(jìn)電機(jī)的頻率特性 ;
2008-10-07 23:53:02 0
0 一種實(shí)用的步進(jìn)電機(jī)驅(qū)動(dòng)電路
步進(jìn)電機(jī)具有快速啟停、精確定位的特點(diǎn),在數(shù)字控制領(lǐng)域經(jīng)常使用步進(jìn)電機(jī)作為位置控制的執(zhí)行機(jī)構(gòu).步進(jìn)電機(jī)在
2010-01-09 21:13:451773 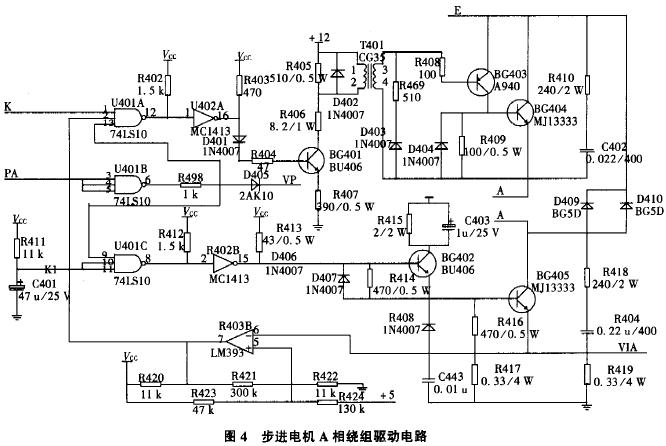
步進(jìn)電機(jī)的結(jié)構(gòu)特點(diǎn)使之適合于精細(xì)的位置控制應(yīng)用。與直流電機(jī)相比較, 在這類應(yīng)用場(chǎng)合中,步進(jìn)電機(jī)的優(yōu)點(diǎn)有: ●電機(jī)停止時(shí)具有保持轉(zhuǎn)矩 ●控制簡(jiǎn)單,開環(huán)控制定位精度高且具有較高的重復(fù)定位精度 ●不需要電刷,因而提高了電機(jī)的可靠性與使用壽命 ●調(diào)速方
2011-01-13 16:49:5977 電磁發(fā)射用直線感應(yīng)電機(jī)位置檢測(cè)系統(tǒng)_何娜
2017-01-08 12:03:281 基于改進(jìn)反電勢(shì)積分的永磁同步電機(jī)位置檢測(cè)_劉剛
2017-01-08 13:38:539 基于終端滑模負(fù)載觀測(cè)器的永磁同步電機(jī)位置系統(tǒng)反步控制_方一鳴
2017-01-08 13:49:171 電機(jī)位置編碼器廣泛用于伺服驅(qū)動(dòng)器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會(huì)帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對(duì)這些挑戰(zhàn),筆者將以
2017-04-26 13:16:121274 由于開環(huán)控制系統(tǒng)具有操作方便,價(jià)格低廉的優(yōu)點(diǎn),所以我國(guó)所采用基本是以開環(huán)控制反應(yīng)式步進(jìn)電機(jī)為主。雖然步進(jìn)電機(jī)應(yīng)用廣泛,但其并不能如同普通的交(直)流電機(jī)在常規(guī)條件下使用,且從起點(diǎn)到終點(diǎn)的運(yùn)行速度在理論狀況下,在電機(jī)的極限起動(dòng)頻率大于運(yùn)行的速度時(shí),電機(jī)可按要求運(yùn)行,并可達(dá)到預(yù)期的運(yùn)行速度。
2017-11-01 10:51:0320542 電機(jī)位置編碼器廣泛用于伺服驅(qū)動(dòng)器、機(jī)器人、機(jī)床、印刷機(jī)、紡織機(jī)和電梯等工業(yè)電機(jī)控制應(yīng)用。用接口把這些編碼器連接到您系統(tǒng)的其它部分會(huì)帶來一些棘手的電磁兼容(EMC)問題。為幫您應(yīng)對(duì)這些挑戰(zhàn),筆者將以
2017-11-17 01:53:522544 電機(jī)控制系統(tǒng)中的電機(jī)位置信息采集技術(shù)
2018-08-22 00:20:003906 步進(jìn)電機(jī)位移與輸入脈沖信號(hào)數(shù)相對(duì)應(yīng),精度高、響應(yīng)特性好、可靠性高、速度可在較寬范圍內(nèi)平滑調(diào)節(jié),是控制系統(tǒng)中一種重要的自動(dòng)化執(zhí)行元件。
2018-09-07 09:14:004169 
系統(tǒng)的干擾引起控制器或驅(qū)動(dòng)器的誤動(dòng)作,我們只能想辦法找出干擾源,降低其干擾能力(如屏蔽,加大間隔距離等),切斷傳播途徑,提高自身抗干擾能力,常見措施:
2019-12-10 08:56:046706 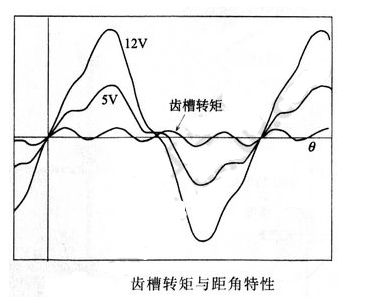
其中(1)的高次諧波為主要原因。步進(jìn)電機(jī)使用方波電流驅(qū)動(dòng),必然含有大量的高次諧波,由此產(chǎn)生振動(dòng)和噪音。因此驅(qū)動(dòng)電流最好為正弦波。接近正弦波的驅(qū)動(dòng)方法有步進(jìn)電機(jī)的細(xì)分步進(jìn)驅(qū)動(dòng)。下圖為電機(jī)1/4細(xì)分、半步、整步驅(qū)動(dòng)的振動(dòng)比較,其振動(dòng)為依次增加的。
2019-12-10 09:25:348494 直線電機(jī)模組一般都是使用在自動(dòng)化機(jī)械設(shè)備上,所以我們要嚴(yán)格把控好精度的變化,要時(shí)刻進(jìn)行精度測(cè)量,但是精度測(cè)量的方法你知道多少呢?下面就帶大家一起學(xué)習(xí)吧! ①、運(yùn)行平行度:在安裝直線電機(jī)模組的平臺(tái)
2020-03-20 16:39:004385 顧名思義,無(wú)刷直流電機(jī)沒有電刷觸點(diǎn),需要使用電機(jī)位置傳感器(MPS)來測(cè)量定子與轉(zhuǎn)子之間的相對(duì)位置,以確保定子線圈按正確順序通電。電機(jī)位置傳感器在啟動(dòng)時(shí)至關(guān)重要,因?yàn)榇藭r(shí)微控制器沒有可用的反電動(dòng)勢(shì)來確定轉(zhuǎn)子和定子的相對(duì)位置。
2020-05-04 16:57:006158 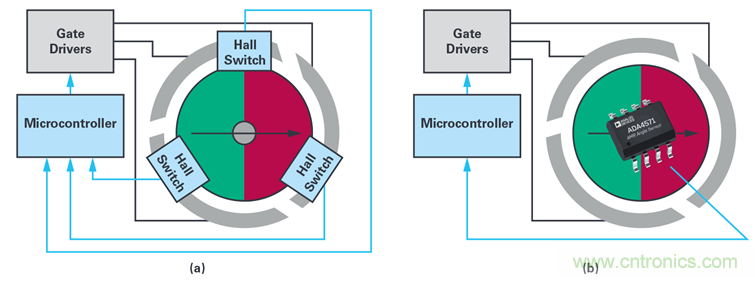
直流無(wú)刷電機(jī)位置傳感器有:磁敏式、光電式和電磁式三種類型。 使用磁敏式位置傳感器的直流無(wú)刷電機(jī),其磁敏器件(如霍爾元件、磁敏二極管、磁敏導(dǎo)電管、磁敏電阻或?qū)S眉呻娐返龋┍话惭b在一個(gè)定子組件上,用于
2020-12-31 10:35:274707 無(wú)刷電機(jī)位置傳感器有:磁敏式、光電式和電磁式三種類型 使用磁敏式位置傳感器的直流無(wú)刷電機(jī),其磁敏器件(如霍爾元件、磁敏二極管、磁敏導(dǎo)電管、磁敏電阻或?qū)S眉呻娐返?被安裝在一個(gè)定子組件上,用于檢測(cè)
2021-09-17 11:05:413091 關(guān)于定位控制(Positioning,調(diào)節(jié)(Regulated)和控制(Controlled)操作之間存在一些區(qū)別。步進(jìn)電機(jī)小需要連續(xù)的位置控制,而在控制操作中得到應(yīng)用。
2022-10-19 12:57:561872 電子發(fā)燒友網(wǎng)站提供《帶按鈕的Arduino控制伺服電機(jī)位置.zip》資料免費(fèi)下載
2022-11-07 15:04:253 電子發(fā)燒友網(wǎng)站提供《直流電機(jī)位置控制開源分享.zip》資料免費(fèi)下載
2022-11-07 09:16:312 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和
轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)
無(wú)需使用位置傳感器僅通過開環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而
被廣泛用于需要定位的設(shè)備中。
2023-01-13 10:47:30515 電子發(fā)燒友網(wǎng)站提供《從SD卡獲取伺服電機(jī)位置.zip》資料免費(fèi)下載
2023-01-31 10:17:080 伺服電機(jī)和步進(jìn)電機(jī)都可以達(dá)到高精度的要求,但是伺服電機(jī)通常比步進(jìn)電機(jī)具有更高的精度。這是因?yàn)樗欧?b class="flag-6" style="color: red">電機(jī)采用了閉環(huán)控制系統(tǒng),可以通過實(shí)時(shí)的反饋控制,準(zhǔn)確地控制電機(jī)的位置、速度和轉(zhuǎn)矩等參數(shù),從而保證了更高的控制精度。同時(shí),伺服電機(jī)具有更高的響應(yīng)速度和更好的動(dòng)態(tài)性能,可以在更短的時(shí)間內(nèi)響應(yīng)和調(diào)整輸出參數(shù)。
2023-03-07 15:05:094103 關(guān)于步進(jìn)電機(jī)你需要知道的一切
2023-03-07 16:58:211214 
步進(jìn)電機(jī)和伺服電機(jī)都是常見的電動(dòng)機(jī)種類,它們有著不同的工作原理和應(yīng)用場(chǎng)合。
步進(jìn)電機(jī)是一種定角度運(yùn)轉(zhuǎn)的電動(dòng)機(jī),它的轉(zhuǎn)動(dòng)是根據(jù)外部提供的脈沖信號(hào)來實(shí)現(xiàn)的。步進(jìn)電機(jī)具有精度高、控制簡(jiǎn)單、適合低速運(yùn)動(dòng)等特點(diǎn),適用于需要高精度定位控制的場(chǎng)合,如印刷機(jī)、繪圖儀、數(shù)碼相機(jī)等。
2023-03-07 17:59:044525 步進(jìn)電機(jī)是一種特殊的電動(dòng)機(jī),相較于傳統(tǒng)的直流電機(jī)或交流電機(jī),其具有以下幾個(gè)特點(diǎn):
高精度定位:步進(jìn)電機(jī)可以通過控制脈沖信號(hào)來實(shí)現(xiàn)準(zhǔn)確的位置定位,通常可達(dá)到0.9度或更小的步距角度,精度高于傳統(tǒng)電機(jī)。
2023-03-08 14:17:275778 步進(jìn)電機(jī)和伺服電機(jī)是兩種常見的電機(jī)類型,它們的應(yīng)用場(chǎng)景和控制方式不同,下面是它們的區(qū)別和選型方法:
步進(jìn)電機(jī)是一種開環(huán)控制電機(jī),控制信號(hào)為脈沖信號(hào),通過控制脈沖數(shù)量和頻率來控制電機(jī)的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)具有簡(jiǎn)單的控制方式、低成本和較高的精度,但通常不能提供高速運(yùn)動(dòng)和高負(fù)載扭矩。
2023-03-08 14:40:451257 一般情況下,伺服電機(jī)的精度要高于步進(jìn)電機(jī)。伺服電機(jī)可以根據(jù)反饋信號(hào)實(shí)時(shí)調(diào)整輸出的電流和位置,能夠更加精準(zhǔn)地控制位置和速度。而步進(jìn)電機(jī)只能按照預(yù)設(shè)的步數(shù)和速度運(yùn)轉(zhuǎn),難以在高速和負(fù)載變化的情況下保持穩(wěn)定的精度。然而,在低速、低負(fù)載、短行程等應(yīng)用場(chǎng)景下,步進(jìn)電機(jī)也可以達(dá)到較高的精度。
2023-03-09 10:45:586264 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無(wú)需使用位置傳感器僅通過開環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:321228 
基于ADRC的永磁同步電機(jī)位置環(huán)控制 原理 仿真 總結(jié) 原理 位置環(huán)ADRC: 仿真位置環(huán)內(nèi)部:ESO內(nèi)部:參數(shù)設(shè)置:轉(zhuǎn)速環(huán):電流環(huán):電機(jī)參數(shù):螺旋槳模塊(查表法):此外螺旋槳加不加都可以,看情況
2023-03-14 09:33:071 下面從速度-轉(zhuǎn)矩特性考慮要增加動(dòng)態(tài)轉(zhuǎn)矩的解決方法。增加轉(zhuǎn)矩時(shí),根據(jù)速度的高低,其解決方法各不相同。而解決方法既有電機(jī)方面的,又有驅(qū)動(dòng)電路方面的。
在低速時(shí)轉(zhuǎn)矩隨轉(zhuǎn)子齒數(shù)增加而變大。選擇
2023-03-21 15:03:520 步進(jìn)電機(jī)基本上以開環(huán)電路驅(qū)動(dòng),用于位置控制。換句話說,步進(jìn)電機(jī)以外的電機(jī)尤其是高精度的步進(jìn)電機(jī)之外并沒有做開環(huán)控制定位的,而用開環(huán)電路驅(qū)動(dòng)的電機(jī)只有步進(jìn)電機(jī)。例如無(wú)刷電機(jī), 首先為切換相,需要測(cè)出
2023-03-22 09:47:362 廣泛地應(yīng)用,但步進(jìn)電機(jī)并不
能象普通的直流電機(jī),交流電機(jī)在常規(guī)下使用。它必須由雙環(huán)形脈沖信號(hào)、功率驅(qū)動(dòng)電路等組成控制系統(tǒng)方可使用。因此也經(jīng)
常會(huì)出現(xiàn)一些定位不準(zhǔn)的故障。
2023-03-23 10:50:161 角位移量以達(dá)到準(zhǔn)確定位的目的;同
時(shí)也可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度而達(dá)到調(diào)速的目的。步進(jìn)電機(jī)作為一種控制用的特種電機(jī),因其沒
有積累誤差(精度為100%)而廣泛應(yīng)用于各種開環(huán)控制。
2023-03-23 10:34:222 步進(jìn)電機(jī)基礎(chǔ)(8.3)-步進(jìn)電機(jī)的問題解決方案-改善暫態(tài)特性的解決方法 前言 基本信息 前言說明 8.3 改善暫態(tài)特性的解決方法 1. 利用阻尼器的改善 2 . 利用驅(qū)動(dòng)電路的改善 (1) 半步進(jìn)
2023-03-24 11:05:350 65---觸摸屏控制步進(jìn)電機(jī)位置實(shí)驗(yàn):
硬件需求:PC機(jī),PCM模塊一個(gè),microUSB線,5V/0.5A直流電源,12V/1A直流電
源,42步進(jìn)電機(jī)1個(gè),A4988步進(jìn)電機(jī)驅(qū)動(dòng)器一個(gè),導(dǎo)線
2023-03-24 10:35:030 . 驅(qū)動(dòng)電路的改善
(1) 額定電壓(電流)驅(qū)動(dòng):
參看圖6.8,從額定電壓降低電壓來驅(qū)動(dòng)步進(jìn)電機(jī),發(fā)現(xiàn)位置定位精度變差。
例如:在空載時(shí),用編碼器作為負(fù)載,在額定電壓(電流)時(shí)的精度與低于
2023-03-24 10:02:100 在一些自動(dòng)控制領(lǐng)域中,步進(jìn)電機(jī)的使用仍占著相當(dāng)大的比例,步進(jìn)電機(jī)與驅(qū)動(dòng)電路組成的開環(huán)數(shù)控系統(tǒng),因其簡(jiǎn)單的結(jié)構(gòu)、低廉的價(jià)格和可靠的性能,目前已在很多行業(yè)中(工業(yè)自動(dòng)化、醫(yī)療自動(dòng)化、紡織自動(dòng)化等)廣泛應(yīng)用。步進(jìn)電機(jī)經(jīng)常被用于精確定位的場(chǎng)合,因而保證電機(jī)不發(fā)生失步至關(guān)重要。
2023-04-15 16:33:4412518 
本篇來介紹電機(jī)的位置環(huán)控制,實(shí)現(xiàn)電機(jī)快速準(zhǔn)確地轉(zhuǎn)動(dòng)到指定位置。回顧上篇,電機(jī)速度PID控制的結(jié)構(gòu)圖如下,目標(biāo)值是設(shè)定的速度,通過編碼器獲取電機(jī)的轉(zhuǎn)速作為反饋,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。再來看電機(jī)位置PID
2023-05-06 11:50:367 用于倉(cāng)儲(chǔ)、制造和服務(wù)設(shè)施的橋式起重機(jī)通常對(duì)日常運(yùn)營(yíng)至關(guān)重要。起重機(jī)用戶要求效率、可靠性和安全性。虹科Dimetix激光測(cè)距儀作為可以定位起重機(jī)位置的傳感器,它們提供高精度和可調(diào)節(jié)的非接觸式測(cè)量。
2023-06-25 09:35:00285 (1)在數(shù)控機(jī)床中,伺服電機(jī)位置模式常用于驅(qū)動(dòng)進(jìn)給軸。通過位置模式,可以實(shí)現(xiàn)對(duì)切削工具的精確位置控制,以實(shí)現(xiàn)高精度的加工操作。 (2)在自動(dòng)化生產(chǎn)線中,伺服電機(jī)位置模式常用于驅(qū)動(dòng)定位裝置、機(jī)械
2023-08-15 08:25:01484 步進(jìn)電機(jī)基本上以開環(huán)電路驅(qū)動(dòng),用于位置控制。換句話說,步進(jìn)電機(jī)以外的電機(jī)尤其是高精度的步進(jìn)電機(jī)之外并沒有做開環(huán)控制定位的,而用開環(huán)電路驅(qū)動(dòng)的電機(jī)只有步進(jìn)電機(jī)。例如無(wú)刷電機(jī),首先為切換相,需要測(cè)出轉(zhuǎn)子
2023-09-24 08:08:441737 
基于步進(jìn)電機(jī)驅(qū)動(dòng)原理,對(duì)步進(jìn)電機(jī)驅(qū)動(dòng)方式進(jìn)行分析,提出了基于西門子S7-1200系列PLC的步進(jìn)電機(jī)位置控制裝置的電氣系統(tǒng)硬件接線及軟件設(shè)計(jì)。通過測(cè)試,該裝置能對(duì)位置進(jìn)行精確控制及狀態(tài)監(jiān)控,在光伏發(fā)電追光系統(tǒng)中可用于光伏板的控制,也適用于PLC運(yùn)動(dòng)控制教學(xué)實(shí)訓(xùn),在自動(dòng)化裝置中有較好的推廣價(jià)值。
2023-10-23 14:38:162584 
無(wú)磁鐵雙線圈技術(shù)為機(jī)器人、工業(yè)和醫(yī)療設(shè)備中使用的電機(jī)位置傳感器及編碼器帶來高分辨率、高精度和高可靠性
2023-10-27 10:00:55538 步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-10-30 11:30:52942 
步進(jìn)電機(jī)是一種將電子信號(hào)轉(zhuǎn)化為機(jī)械運(yùn)動(dòng)的電動(dòng)機(jī),廣泛應(yīng)用于機(jī)器人、打印機(jī)、數(shù)碼相機(jī)等領(lǐng)域。步進(jìn)電機(jī)由于其精度高、固有扭矩大、容易控制等特點(diǎn),在精密定位和運(yùn)動(dòng)控制中起著舉足輕重的作用。本文將詳細(xì)介紹
2023-12-20 11:21:24768 伺服位置誤差大的原因及解決方法 伺服電機(jī)是一種精密控制裝置,可以實(shí)現(xiàn)高精度、高穩(wěn)定性的位置控制。然而,伺服電機(jī)在使用過程中常常出現(xiàn)定位誤差過大的問題。本文將從機(jī)械結(jié)構(gòu)、控制系統(tǒng)、環(huán)境因素、測(cè)量誤差
2023-12-25 13:57:521856 步進(jìn)電機(jī)丟步的原因和解決方法 步進(jìn)電機(jī)是一種常見的電動(dòng)機(jī)類型,特點(diǎn)是可以實(shí)現(xiàn)精確的位置控制和旋轉(zhuǎn)運(yùn)動(dòng)。然而,在實(shí)際使用過程中,步進(jìn)電機(jī)有時(shí)會(huì)出現(xiàn)丟步的現(xiàn)象,即無(wú)法按照預(yù)定步長(zhǎng)準(zhǔn)確移動(dòng)。這種情況可能會(huì)
2024-02-01 16:32:47706
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論