,與易于連接和運(yùn)行的有刷直流電機(jī)和交流感應(yīng)電機(jī)不同,BLDC 和 PMSM 要復(fù)雜得多。 例如,特別是無(wú)傳感器矢量控制(也稱為磁場(chǎng)定向控制或FOC)等技術(shù),具有出色的效率以及消除傳感器硬件的優(yōu)勢(shì),從而降低成本并提高可靠性。設(shè)計(jì)人員面臨的問(wèn)題是,無(wú)
2023-02-07 08:12:00 7498
7498 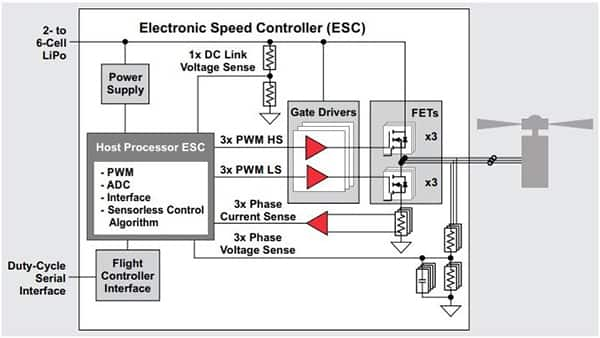
大轉(zhuǎn)矩場(chǎng)合。產(chǎn)品特點(diǎn):高性能、快速加減速、控制精度高額定負(fù)載條件下,0.1秒任意加、減速,自動(dòng)限流,自動(dòng)穩(wěn)壓,保證無(wú)故障最優(yōu)控制無(wú)速度傳感器電流矢量控制:轉(zhuǎn)矩控制精度高;穩(wěn)速控制精度高低頻帶載能力強(qiáng)
2015-12-01 23:59:53
大轉(zhuǎn)矩場(chǎng)合。產(chǎn)品特點(diǎn):高性能、快速加減速、控制精度高額定負(fù)載條件下,0.1秒任意加、減速,自動(dòng)限流,自動(dòng)穩(wěn)壓,保證無(wú)故障最優(yōu)控制無(wú)速度傳感器電流矢量控制:轉(zhuǎn)矩控制精度高;穩(wěn)速控制精度高低頻帶載能力強(qiáng)
2015-08-27 10:57:45
使用正弦波輸出控制無(wú)刷電機(jī),使電機(jī)旋轉(zhuǎn)平滑穩(wěn)定;為了實(shí)現(xiàn)云臺(tái)電機(jī)轉(zhuǎn)動(dòng)角度的精準(zhǔn)控制,需要結(jié)合磁阻傳感器(例如使用TLE5012B磁組傳感器)精準(zhǔn)反饋電機(jī)轉(zhuǎn)動(dòng)的角度,將該反饋角度融合到矢量控制系統(tǒng)FOC中
2016-03-23 18:38:32
用驅(qū)動(dòng)電機(jī)無(wú)電流傳感器控制針對(duì)傳統(tǒng)電機(jī)的矢量控制方法應(yīng)用于車用驅(qū)動(dòng)電機(jī)時(shí),高效工作區(qū)窄,反饋閉環(huán)控制導(dǎo)致過(guò)流等現(xiàn)象問(wèn)題,提出一種無(wú)電流傳感器電機(jī)控制方法。根據(jù)指令轉(zhuǎn)矩和電機(jī)轉(zhuǎn)速,直接控制電壓空間矢量的幅值和相位,實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)矩和轉(zhuǎn)速的控制。
2016-02-01 11:52:42
一個(gè)階段的學(xué)習(xí)結(jié)束了,整理了之前的過(guò)程中的學(xué)習(xí)成果,已經(jīng)過(guò)了工作的年紀(jì),在這里稍微出一下自己做的一套永磁同步電機(jī)的教程,從基礎(chǔ)的矢量控制,到應(yīng)用性較強(qiáng)的MTPA、弱磁控制等,最后深入到無(wú)速度傳感器
2021-08-27 07:24:40
的中心排列 PWM 信號(hào)。為了感應(yīng)轉(zhuǎn)子位置, BLDC 電機(jī)采用霍爾效應(yīng)傳感器來(lái)提供絕對(duì)定位感應(yīng),這就導(dǎo)致了更多線的使用和更高的成本。無(wú)傳感器 BLDC 控制省去了對(duì)于霍爾傳感器的需要,而是采用電機(jī)
2020-12-30 07:00:00
感應(yīng)電動(dòng)機(jī)直接轉(zhuǎn)矩控制 第5章 三相永磁同步電動(dòng)機(jī)直接轉(zhuǎn)矩控制 三相永磁同步電動(dòng)機(jī)直接轉(zhuǎn)矩控制 第6章 無(wú)速度傳感器控制與智能控制 無(wú)速度傳感器控制與智能控制電機(jī)選型經(jīng)典計(jì)算公式、步驟、實(shí)例
2020-06-29 15:25:02
詳細(xì)講解電機(jī)矢量控制
2015-06-15 16:40:41
之前有朋友反應(yīng)對(duì)電機(jī)矢量控制有很大的學(xué)習(xí)需求,他說(shuō)缺乏“實(shí)干”的書(shū)籍,國(guó)內(nèi)暫時(shí)并沒(méi)有發(fā)現(xiàn)太多實(shí)用的書(shū)籍,這里給大家推薦一本日本一線工程師的電機(jī)矢量控制書(shū)籍——《無(wú)刷直流電機(jī)矢量控制技術(shù)》,作者江琦雅
2021-08-26 09:54:28
1. 矢量控制常用的位置傳感器在電機(jī)磁場(chǎng)定向控制算法中,電機(jī)轉(zhuǎn)子位置的獲取是必要的,在高精度應(yīng)用場(chǎng)合,通常使用編碼器、旋轉(zhuǎn)變壓器進(jìn)行位置反饋,這種方式需要較高的成本。對(duì)于一般的應(yīng)用場(chǎng)合,如電動(dòng)自行車
2021-06-29 09:06:35
電機(jī)矢量控制
2021-09-13 06:30:09
矢量控制方式——矢量控制,最簡(jiǎn)單的說(shuō),就是將交流電機(jī)調(diào)速通過(guò)一系列等效變換,等效成直流電機(jī)的調(diào)速特性,就這么簡(jiǎn)單,至于深入了解,那就得深入了解變頻器的數(shù)學(xué)模型,電機(jī)學(xué)等學(xué)科。矢量控制原理是模仿
2021-06-28 08:26:48
矢量控制常用的位置傳感器是什么?Hall傳感器的原理是什么?
2021-10-19 07:15:29
不足的技術(shù) 使用"矢量控制",可以使電機(jī)在低速,如(無(wú)速度傳感器時(shí))1Hz(對(duì)4極電機(jī),其轉(zhuǎn)速大約為30r/min)時(shí)的輸出轉(zhuǎn)矩可以達(dá)到電機(jī)在50Hz供電輸出的轉(zhuǎn)矩(最大約為額定
2016-01-29 10:05:03
Anders Frederiksen內(nèi)容提要面向電機(jī)和功率級(jí)動(dòng)態(tài)特性的高級(jí)建模技術(shù)可以大幅提高電機(jī)控制效率,確保根據(jù)系統(tǒng)行為的實(shí)時(shí)變動(dòng)實(shí)行精密控制。通過(guò)無(wú)傳感器矢量控制技術(shù),設(shè)計(jì)人員可以增強(qiáng)電機(jī)
2018-10-10 18:16:43
什么是FOC矢量控制總體算法?FOC算法的優(yōu)點(diǎn)有哪些?FOC(電機(jī)矢量控制)與DTC(直接轉(zhuǎn)矩控制)的區(qū)別在哪?
2021-08-06 08:57:17
自行開(kāi)發(fā)了一套基于 PI調(diào)節(jié)器的無(wú)速度傳感器矢量控制系統(tǒng),并且在自行搭建的實(shí)驗(yàn)平臺(tái)進(jìn)行了調(diào)速實(shí)驗(yàn),在實(shí)驗(yàn)過(guò)程中,運(yùn)用了 Matlab與 DSP混合編程的調(diào)試方法,實(shí)驗(yàn)結(jié)果表明,采用 Matlab調(diào)試
2018-11-14 15:23:46
MRAS無(wú)速度傳感器矢量控制系統(tǒng) 現(xiàn)在對(duì)高性能電機(jī)的變頻調(diào)速一般采用矢量控制或者直接轉(zhuǎn)矩控制。而轉(zhuǎn)速的觀測(cè)和閉環(huán)控制是重要的控制環(huán)節(jié)。模型參考自適應(yīng)法(MRAS)就是其中使用頻率較高的一種
2016-01-04 15:39:35
文章目錄寫在前面SPWM異步電機(jī)矢量控制電流滯環(huán)矢量控制SVPWM矢量控制直流電機(jī)雙閉環(huán)控制傳遞函數(shù)模型半實(shí)物模型End寫在前面今天看了看電腦原來(lái)對(duì)文件,發(fā)現(xiàn)之前上過(guò)一門電傳課,學(xué)的時(shí)候做了很多很多
2021-09-06 08:38:23
的魯棒控制方案。利用高速開(kāi)關(guān)控制動(dòng)作在控制器的不同結(jié)構(gòu)之間進(jìn)行切換,使系統(tǒng)的軌跡在狀態(tài)空間中沿著選定的開(kāi)關(guān)流形運(yùn)動(dòng)。本文提出了一種新的無(wú)傳感器矢量控制方案,一方面,該方案克服了速度傳感器的必要性,另一...
2021-09-06 06:02:14
無(wú)刷直流電機(jī)(BLDC)和永磁同步電機(jī)(PMSM)的區(qū)別在哪?SPWM控制是什么?三相PMSM矢量控制技術(shù)包括哪幾部分?
2021-07-27 07:10:16
什么是矢量控制時(shí)序?
2022-02-11 06:38:40
變頻器VF輸出電壓和頻率成正比,電流大小和相位由負(fù)載決定,那么矢量控制時(shí)的輸出電壓和電流在數(shù)量和相位上有什么緊密聯(lián)系的點(diǎn),能夠?qū)崿F(xiàn)精準(zhǔn)控制輸出和低頻高扭矩輸出?詳細(xì)解釋矢量控制的輸出電壓電流聯(lián)系以及和負(fù)載之間的關(guān)系?
2024-02-18 19:58:37
變頻器的三種控制模式,恒壓頻比模式,無(wú)速度傳感器矢量模式,有速度傳感器矢量模式,從控制性能和穩(wěn)定性來(lái)說(shuō)這三種逐漸優(yōu)良。但是有些不明白的點(diǎn),變頻器在恒壓頻比控制模式下無(wú)論是空載還是滿載在額定頻率下速度
2024-02-02 17:03:56
的影響較小。2) 當(dāng)調(diào)速范圍不大,在1:10的速度范圍內(nèi)時(shí),常采用無(wú)速傳感器的轉(zhuǎn)速開(kāi)環(huán)矢量控制方式,這時(shí)其靜態(tài)機(jī)械特性已經(jīng)相當(dāng)完美;當(dāng)調(diào)速范圍較大,即在低速下也要求具有高動(dòng)態(tài)性能和高轉(zhuǎn)速精度時(shí),才需要有帶
2014-04-10 14:54:21
的影響較小。2) 當(dāng)調(diào)速范圍不大,在1:10的速度范圍內(nèi)時(shí),常采用無(wú)速傳感器的轉(zhuǎn)速開(kāi)環(huán)矢量控制方式,這時(shí)其靜態(tài)機(jī)械特性已經(jīng)相當(dāng)完美;當(dāng)調(diào)速范圍較大,即在低速下也要求具有高動(dòng)態(tài)性能和高轉(zhuǎn)速精度時(shí),才需要有帶
2014-05-09 09:31:02
在變頻器控制模式中,有無(wú)速度矢量傳感器模式,該模式又分為兩種,無(wú)感矢量0和無(wú)感矢量1,這兩種模式的本質(zhì)原理是什么?對(duì)變頻器的控制電機(jī)性能和系統(tǒng)穩(wěn)定性響應(yīng)什么的有什么影響?具體應(yīng)用上哪種方式更好一點(diǎn),或者而言這兩種模式的優(yōu)缺點(diǎn)是什么?更適合用于什么場(chǎng)合?針對(duì)不同功率的變頻器和電機(jī)?
2024-02-22 21:45:53
,處理定向定子通量電流。 無(wú)傳感器控制 要想在矢量控制模式中運(yùn)行AC電機(jī),重要的是同步應(yīng)用電壓的頻率和來(lái)自轉(zhuǎn)子中的永磁轉(zhuǎn)子通量位置。這樣就產(chǎn)生了無(wú)傳感器操作模式,其中,速度和位置算法取代了傳感器
2018-10-31 17:21:52
PMSM無(wú)傳感器矢量控制原理PSoC4簡(jiǎn)介基于PSoC4的無(wú)傳感器矢量控制方案基于PSoC4的設(shè)計(jì)實(shí)例
2021-02-24 06:12:44
精準(zhǔn)的數(shù)字矢量控制算法。 本文檔中討論了這個(gè)算法的實(shí)現(xiàn)。FOC算法在很大速度范圍內(nèi)保持高效,并且通過(guò)處理一個(gè)電機(jī)的動(dòng)態(tài)模型來(lái)將具有瞬態(tài)相位的轉(zhuǎn)矩變化考慮在內(nèi)。 解決方案中提出了消除相位電流傳感器以及使用一個(gè)觀察器來(lái)實(shí)現(xiàn)速度無(wú)傳感器控制的方法。
2019-12-10 17:17:02
表貼式永磁同步電機(jī)FOC矢量控制中電流環(huán)PI控制器參數(shù)的調(diào)試過(guò)程是怎樣的?
2021-09-23 06:35:41
大轉(zhuǎn)矩場(chǎng)合。產(chǎn)品特點(diǎn):高性能、快速加減速、控制精度高額定負(fù)載條件下,0.1秒任意加、減速,自動(dòng)限流,自動(dòng)穩(wěn)壓,保證無(wú)故障最優(yōu)控制無(wú)速度傳感器電流矢量控制:轉(zhuǎn)矩控制精度高;穩(wěn)速控制精度高低頻帶載能力強(qiáng)
2016-01-16 22:05:55
大轉(zhuǎn)矩場(chǎng)合。產(chǎn)品特點(diǎn):高性能、快速加減速、控制精度高額定負(fù)載條件下,0.1秒任意加、減速,自動(dòng)限流,自動(dòng)穩(wěn)壓,保證無(wú)故障最優(yōu)控制無(wú)速度傳感器電流矢量控制:轉(zhuǎn)矩控制精度高;穩(wěn)速控制精度高低頻帶載能力強(qiáng):SVC/0.5Hz/150%轉(zhuǎn)矩`
2016-05-30 17:12:11
異步電機(jī)的無(wú)速度傳感矢量控制設(shè)計(jì)矢量控制技術(shù)在速度和轉(zhuǎn)矩控制經(jīng)過(guò)了長(zhǎng)期的發(fā)展,逐漸趨于成熟,這使得在電機(jī)領(lǐng)域交流控制可以擁有與直流控制系統(tǒng)一樣甚至更好性能成為可能。由于無(wú)速度傳感器矢量控制沒(méi)有速度
2016-01-21 15:40:59
矢量控制技術(shù)與其他方式的比較推薦課程:張飛軟硬開(kāi)源,基于STM32 BLDC直流無(wú)刷電機(jī)驅(qū)動(dòng)器視頻套件http://t.elecfans.com/topic/42.html?elecfans_trackid=bbs_post
2014-09-16 15:14:15
推薦課程:張飛軟硬開(kāi)源:基于STM32的BLDC直流無(wú)刷電機(jī)驅(qū)動(dòng)器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd 永磁同步電機(jī)矢量控制原理1.永磁同步電動(dòng)機(jī)
2014-01-22 09:46:51
永磁同步電機(jī)的矢量控制原理是什么?永磁同步電機(jī)的矢量控制進(jìn)行坐標(biāo)變換的原因是什么?
2021-10-14 06:21:27
現(xiàn)代電機(jī)控制技術(shù)矢量控制推薦課程:張飛軟硬開(kāi)源,基于STM32 BLDC直流無(wú)刷電機(jī)驅(qū)動(dòng)器視頻套件http://t.elecfans.com/topic/42.html?elecfans_trackid=bbs_post
2017-11-03 08:50:07
我想用28035做電機(jī)PMSM的矢量控制(FOC),但電機(jī)上只安裝了三個(gè)霍爾傳感器,沒(méi)有編碼器,請(qǐng)問(wèn)這樣可以做FOC算法嗎?因?yàn)橹翱吹竭^(guò)說(shuō)做FOC一定要用到編碼器.不知道有沒(méi)有了解的。
2018-12-04 11:22:40
之前一直使用PI控制器做異步電機(jī)矢量控制,最近想把ADRC控制也放到異步電機(jī)矢量控制上去,所以對(duì)其進(jìn)了仿真,可遇到了一個(gè)一直沒(méi)有解決掉的問(wèn)題,現(xiàn)記錄下來(lái),請(qǐng)各位先輩進(jìn)行指教以及為遇到同樣問(wèn)題的人
2021-08-27 06:55:33
FOC矢量控制算法的原理是什么?FOC與DTC控制有何區(qū)別?
2021-09-18 06:51:32
的工作特點(diǎn)對(duì)傳統(tǒng)的矢量控制系統(tǒng)進(jìn)行改進(jìn)。機(jī)車運(yùn)行條件惡劣,震動(dòng)強(qiáng)烈且工作環(huán)境灰塵多,這些條件對(duì)速度傳感器會(huì)有很大的危害。所以機(jī)車在某些情況下不能使用速度傳感器,在系統(tǒng)設(shè)計(jì)時(shí)要考慮實(shí)現(xiàn)無(wú)速度傳感器運(yùn)行
2019-09-29 08:27:31
相信在搞電機(jī)控制的小伙伴應(yīng)該知道目前對(duì)永磁同步電機(jī)(PMSM)的控制技術(shù)主要有磁場(chǎng)定向矢量控制(FOC)和直接轉(zhuǎn)矩控制技術(shù)(DTC)。今天主要是想說(shuō)一說(shuō)磁場(chǎng)定向矢量控制(FOC)磁場(chǎng)定向矢量控制
2021-08-27 07:38:34
什么是無(wú)速度傳感器矢量控制系統(tǒng)?怎樣對(duì)無(wú)速度傳感器矢量控制系統(tǒng)進(jìn)行調(diào)試?
2021-04-28 06:49:48
據(jù)我了解 ,直流無(wú)刷的控制是按照直流電機(jī)的控制思路來(lái)控制的,但是在網(wǎng)上也能看到用矢量控制來(lái)實(shí)現(xiàn)的。所以想請(qǐng)教一下大家,矢量控制對(duì)于永磁同步電機(jī)和直流無(wú)刷的控制有啥區(qū)別?
2018-09-08 18:53:04
基于PLC分級(jí)遞階分布式控制的無(wú)速度傳感器矢量控制調(diào)速系統(tǒng):提出了一種實(shí)用的基于PLC 分級(jí)遞階分布式控制的多電機(jī)無(wú)速度傳感器矢量控制調(diào)速系統(tǒng)設(shè)計(jì)的新方法。實(shí)驗(yàn)結(jié)果表明
2009-06-08 14:01:26 26
26 根據(jù)感應(yīng)電機(jī)無(wú)速度傳感器矢量控制、模糊控制及自適應(yīng)原理,在無(wú)速度傳感器矢量控制系統(tǒng)中采用模型參考自適應(yīng)模糊控制(MR2FAS) 進(jìn)行感應(yīng)電機(jī)的轉(zhuǎn)速估計(jì),并與模型參考自適應(yīng)(MR
2009-07-06 09:07:3518 本文提出了一種基于DSP 的隱極電機(jī)的無(wú)位置傳感器的矢量控制方法。本算法充分利用了隱極電機(jī)的特性來(lái)進(jìn)行近似地估計(jì)轉(zhuǎn)子的位置,大大減低了算法的運(yùn)算量。此外,本算法還
2009-08-12 09:48:0614 基于MATLAB的無(wú)速度傳感器矢量控制仿真:設(shè)計(jì)了參數(shù)自調(diào)整模糊控制代替常規(guī)的PI調(diào)節(jié)器,構(gòu)建無(wú)速度傳感器異步機(jī)矢量控制系統(tǒng),并運(yùn)用Matlab\Simulink工具構(gòu)造異步電動(dòng)機(jī)的矢量
2009-11-18 11:15:4751 基于DSP的異步電機(jī)矢量控制系統(tǒng)設(shè)計(jì)
0 引言
隨著現(xiàn)代控制理論、微處理技術(shù)和電力電子技術(shù)的不斷發(fā)展,基于矢量控制的高性能交流傳動(dòng)系統(tǒng)得到廣泛
2010-01-22 11:24:231983 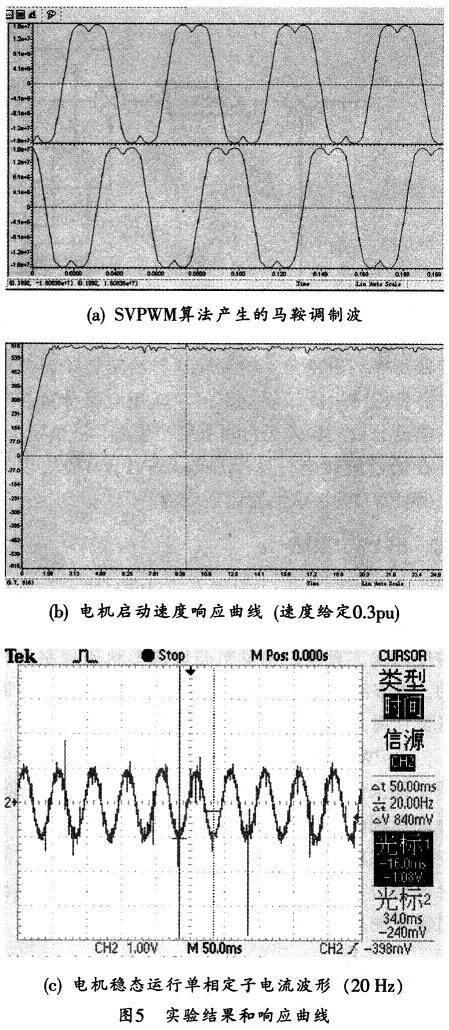
MATLAB-DSP在無(wú)傳感器矢量控制中的應(yīng)用
1.引言
Matlab是一個(gè)強(qiáng)大的分析、計(jì)算和可視化工具,特別適用于控制系統(tǒng)
2010-03-22 14:29:241095 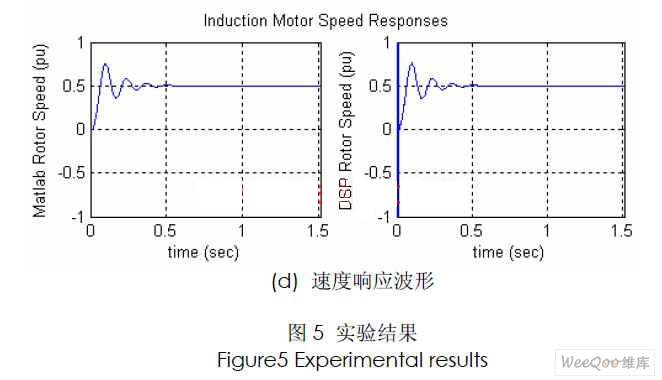
該書(shū)介紹了無(wú)速度傳感器矢量控制系統(tǒng)的具體電路、工作原理、參數(shù)設(shè)計(jì)和調(diào)整方法。此外還介紹了幾種典型的無(wú)速度傳感器的速度推算和觀測(cè)方案。書(shū)末列出了日、法、英、美、徳等國(guó)最新無(wú)速度傳感器矢量控制變頻器的技術(shù)數(shù)據(jù)和規(guī)格,以供讀者參考。
2015-11-05 16:53:370 基于DSP的異步電機(jī)無(wú)速度傳感器矢量控制系統(tǒng)的研究與實(shí)現(xiàn)
2016-04-18 09:47:4921 基于單元串聯(lián)的無(wú)速度傳感器矢量控制算法研究_黃哲
2017-01-08 10:57:060 一種高性能感應(yīng)電機(jī)無(wú)速度傳感器矢量控制策略_常乾坤
2017-01-08 11:28:383 基于等效滑膜控制的永磁同步電機(jī)矢量控制_宋海良
2017-02-07 18:22:067 同步電機(jī)矢量控制
2017-04-24 09:40:060 提出了一種實(shí)用的基于PLC分級(jí)遞階分布式控制的多電機(jī)無(wú)速度傳感器矢量控制調(diào)速系統(tǒng)設(shè)計(jì)的新方法。
2017-09-08 15:00:4511 異步電機(jī)_矢量控制
2017-11-29 15:41:0116 演講題目:《飛思卡爾完善的永磁同步電機(jī)無(wú)位置傳感器矢量控制解決方案》,演講者:飛思卡爾微控制器方案部高級(jí)應(yīng)用工程師 葉萬(wàn)富。
2018-06-21 10:30:005589 )分別加以控制,并同時(shí)控制兩分量間的幅值和相位,這樣即可等效于直流電機(jī)。矢量控制方式又有基于轉(zhuǎn)差頻率控制的矢量控制方式、無(wú)速度傳感器矢量控制方式和有速度傳感器的矢量控制方式等。
2018-07-24 16:09:2237707 
近年來(lái),異步電機(jī)的無(wú)速度傳感器矢量控制成為研究熱點(diǎn)。目前,異步電機(jī)無(wú)速度傳感器矢量控制在中高速段已獲得良好的控制性能,但在極低速段(<1Hz)卻仍未實(shí)現(xiàn)良好的控制。這是因?yàn)槌S玫漠惒?b class="flag-6" style="color: red">電機(jī)無(wú)速度傳感器
2019-09-30 07:57:003894 
面向電機(jī)和功率級(jí)動(dòng)態(tài)特性的高級(jí)建模技術(shù)可以大幅提 高電機(jī)控制效率,確保根據(jù)系統(tǒng)行為的實(shí)時(shí)變動(dòng)實(shí)行精 密控制。通過(guò)無(wú)傳感器矢量控制技術(shù),設(shè)計(jì)人員可以增 強(qiáng)電機(jī)系統(tǒng)的性能,降低功耗,并且符合旨在提高能效 的新法規(guī)要求。基于新一代數(shù)字信號(hào)處理技術(shù)的新型電 機(jī)控制方案有望加速先進(jìn)控制方案的運(yùn)用。
2021-01-05 02:22:0015 用于超高效電機(jī)控制的無(wú)位置傳感器矢量控制技術(shù)
2021-05-19 08:25:0110 永磁同步電機(jī)矢量控制原理說(shuō)明。
2021-05-19 10:02:2660 交流電機(jī)矢量控制說(shuō)明。
2021-05-19 10:28:2812 基于矢量控制的永磁同步電機(jī)控制方法綜述
2021-06-29 14:17:4551 基于矢量控制的永磁同步交流伺服電機(jī)控制系統(tǒng)程序(電源技術(shù)交流)-基于矢量控制的永磁同步交流伺服電機(jī)控制系統(tǒng)程序
2021-09-23 15:57:2130 使用MCU的DAC來(lái)觀測(cè)矢量控制FOC電機(jī)控制波形
2021-12-08 16:51:2119 在 STM32 控制框架內(nèi)設(shè)計(jì)了無(wú)位置傳感器電機(jī)矢量控制系統(tǒng),采用基于鎖相環(huán)的滑模觀測(cè)器對(duì)轉(zhuǎn)子位置及轉(zhuǎn)速精確估計(jì)并完成電機(jī)矢量控制。給出控制系統(tǒng)的總體設(shè)計(jì)框架及其實(shí)現(xiàn)方法,進(jìn)行性能仿真分析。
2022-10-21 15:53:542 以電機(jī)和功率級(jí)動(dòng)力學(xué)為中心的高級(jí)建模技術(shù)可以顯著提高電機(jī)控制效率,確保實(shí)時(shí)適應(yīng)系統(tǒng)行為波動(dòng)的精確控制。通過(guò)應(yīng)用無(wú)傳感器矢量控制技術(shù),設(shè)計(jì)人員可以提高電機(jī)系統(tǒng)的性能并降低功耗,并符合旨在提高能源效率的新興政府法規(guī)。由下一代數(shù)字信號(hào)處理技術(shù)實(shí)現(xiàn)的新電機(jī)控制方案有望加速先進(jìn)控制方案的采用。
2023-02-02 11:33:391449 
以電機(jī)和功率級(jí)動(dòng)力學(xué)為中心的高級(jí)建模技術(shù)可以顯著提高電機(jī)控制效率,確保實(shí)時(shí)適應(yīng)系統(tǒng)行為波動(dòng)的精確控制。通過(guò)應(yīng)用無(wú)傳感器矢量控制,設(shè)計(jì)人員可以提高電機(jī)系統(tǒng)的性能并降低功耗,并符合旨在提高能源效率的新興政府法規(guī)。由下一代數(shù)字信號(hào)處理技術(shù)實(shí)現(xiàn)的新電機(jī)控制技術(shù)有望加速先進(jìn)控制方案的采用。
2023-03-06 13:45:14803 
矢量控制是一種具有高精度的電機(jī)控制技術(shù),可以實(shí)現(xiàn)電機(jī)轉(zhuǎn)矩、速度和位置的精確控制。基于矢量控制技術(shù)的電機(jī)控制器能夠精確調(diào)節(jié)電機(jī)的電流、電壓和頻率,以達(dá)到最佳性能和效率。
2023-03-28 15:15:029709 矢量控制是一種高級(jí)的電機(jī)控制方法,它的基本原理是通過(guò)對(duì)電機(jī)的磁場(chǎng)進(jìn)行控制,來(lái)實(shí)現(xiàn)對(duì)電機(jī)的轉(zhuǎn)矩、轉(zhuǎn)速和位置的控制。矢量控制技術(shù)將三相電機(jī)的電流、電壓和頻率進(jìn)行坐標(biāo)變換,將其轉(zhuǎn)換為直角坐標(biāo)系下的兩個(gè)分量x和y的形式,然后可以分別對(duì)這兩個(gè)分量進(jìn)行控制,從而精確地控制電機(jī)的磁場(chǎng)和電流。
2023-03-28 15:44:093673 標(biāo)量控制和矢量控制是電機(jī)控制領(lǐng)域中兩種不同的控制方法。
標(biāo)量控制是指控制電機(jī)的轉(zhuǎn)速,同時(shí)控制轉(zhuǎn)速來(lái)間接實(shí)現(xiàn)對(duì)電機(jī)的轉(zhuǎn)矩控制。利用電機(jī)等效電路模型,通過(guò)調(diào)整電機(jī)的電壓、電流和頻率等參數(shù)實(shí)現(xiàn)轉(zhuǎn)速控制。標(biāo)量控制器適用于負(fù)載變化較小、負(fù)載要求不高的場(chǎng)合,如風(fēng)扇、水泵等傳統(tǒng)的電機(jī)應(yīng)用。
2023-03-28 15:59:014576 異步電機(jī)的控制方法可以劃分為矢量控制與標(biāo)量控制。
在標(biāo)量控制中,僅對(duì)電壓、電流、以及磁鏈等矢量的幅值和旋轉(zhuǎn)頻率進(jìn)行控制,如恒壓頻比(VF)控制技術(shù)。
在矢量控制中,將矢量的瞬時(shí)位置納入控制范疇,如矢量控制(F0C)、直接轉(zhuǎn)矩控制(DTC)、模型預(yù)測(cè)控制(MPC) 等高性能控制方
法。
2023-03-29 11:41:271 導(dǎo)讀:本期文章主要介紹異步電機(jī)無(wú)速度傳感器矢量控制。首先分析無(wú)速度傳感器的優(yōu)勢(shì),然后分次介紹不同的速度估計(jì)方法,最后進(jìn)行MATLAB/Simulink仿真模型搭建,驗(yàn)證方法的可行性和有效性。 如果
2023-03-29 11:42:460 導(dǎo)讀:本期文章主要介紹基于三電平SVPWM發(fā)波的異步電機(jī)矢量控制。現(xiàn)有的參考文獻(xiàn)指出,基于三電平SVPWM發(fā)波的異步電機(jī)矢量控制相比較于兩電平SVPWM發(fā)波的具有更好的動(dòng)態(tài)響應(yīng)和穩(wěn)態(tài)性能。 如果需要
2023-03-30 09:51:120 3. 控制程序描述 介紹本應(yīng)用筆記的目標(biāo)軟件。 3.3 控制的內(nèi)容 3.3.1 配置選項(xiàng) 可以使用RA配置器來(lái)配置電機(jī)的無(wú)傳感器矢量控制模塊的配置選項(xiàng)。生成代碼時(shí),發(fā)生更改的選項(xiàng)會(huì)自動(dòng)反映
2023-05-26 23:20:01268 
面向高效電機(jī)控制的無(wú)傳感器矢 量控制技術(shù)繼續(xù)發(fā)展
2024-01-04 10:56:56222 
RA6T2無(wú)傳感器矢量控制應(yīng)用筆記
2023-08-14 09:49:42110 
RA6T2無(wú)傳感器矢量控制應(yīng)用筆記
2023-08-19 08:08:0098 RA6T2無(wú)傳感器矢量控制應(yīng)用筆記
2023-08-26 08:07:2595 RA6T2無(wú)傳感器矢量控制應(yīng)用筆記
2023-09-04 16:22:52116 RA6T2無(wú)傳感器矢量控制應(yīng)用筆記
2023-09-14 08:07:3599 RA6T2無(wú)傳感器矢量控制應(yīng)用筆記
2023-09-22 08:07:32108 RA6T2無(wú)傳感器矢量控制應(yīng)用筆記
2023-10-10 09:34:17117 無(wú)刷直流電機(jī)是矢量控制的主要選擇,其中磁場(chǎng)定向是主要方法。通過(guò)使用無(wú)刷電機(jī)的矢量控制(FOC),可以獲得最高效率,高達(dá)95%,并且對(duì)于高速操作也非常有效。 矢量控制是一種通過(guò)調(diào)整電機(jī)電流的大小和方向
2024-01-11 11:47:00376 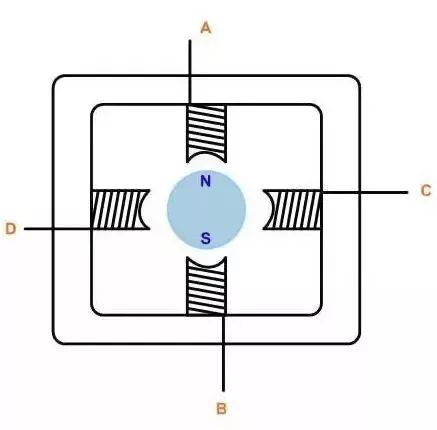
電子發(fā)燒友網(wǎng)站提供《永磁同步電機(jī)的矢量控制帶感應(yīng)傳感器的電機(jī)應(yīng)用指南.pdf》資料免費(fèi)下載
2024-01-30 09:36:350
 電子發(fā)燒友App
電子發(fā)燒友App

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論