步進(jìn)電機(jī)一般分為永磁式(PM)、反應(yīng)式(VR)和混合式(HB)三種類型。目前,二相混合式步進(jìn)電機(jī)的應(yīng)用最為廣泛。
2012-01-26 14:23:00 2921
2921 
在控制步進(jìn)電機(jī)的失步方面,步進(jìn)電機(jī)的加速曲線也非常重要,加速的規(guī)律一般有兩種,一是按照直線規(guī)律升速,二是按指數(shù)規(guī)律升速!
2018-09-14 08:51:1913417 在選用西門子伺服電機(jī)時(shí),為了能夠滿足實(shí)際工況的需要,需要考慮所選電機(jī)的扭矩轉(zhuǎn)速特性曲線、電壓極限特性曲線。本文為大家進(jìn)行相關(guān)內(nèi)容的介紹。
2023-11-01 15:21:271188 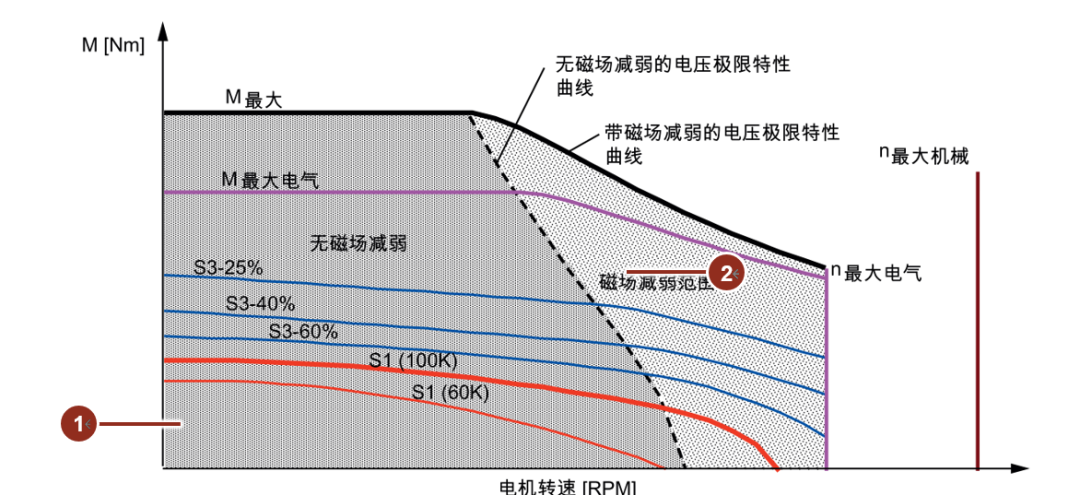
一、設(shè)計(jì)目的分析步進(jìn)電機(jī)的驅(qū)動(dòng)原理,將單片機(jī)應(yīng)用于步進(jìn)電機(jī)的控制接口設(shè)計(jì);利用中斷定時(shí)方法,實(shí)現(xiàn)步進(jìn)電機(jī)的位置控制、方向控制和速度控制。利用ZLG7290鍵盤/顯示電路,設(shè)置給定信號(hào),并顯示實(shí)際信息
2021-12-02 07:45:41
大牛們,幫我分析下下面的電路能否驅(qū)動(dòng)兩相步進(jìn)電機(jī)其中1/2/3/4接單片機(jī),另外1綠(地)2棕3黃4橙5紅分別接步進(jìn)電機(jī),電路已經(jīng)搭好了,電機(jī)不轉(zhuǎn),幫我分析下原因唄,謝謝,各位大牛們!
2017-03-15 16:33:57
步進(jìn)電機(jī)S(SigMoid)曲線加減速【查表法】原創(chuàng)Renjiankun 最后發(fā)布于2019-01-11 14:18:00 閱讀數(shù) 17578 收藏展開首先感謝以下博客的博主提供的參考公式
2021-07-08 09:38:52
S型曲線的的方程,在[-5,5]的圖形如下圖所示:如要將此曲線應(yīng)用在步進(jìn)電機(jī)的加、減速過程中,需要將方程在XY坐標(biāo)系進(jìn)行平移,同時(shí)對(duì)曲線進(jìn)行拉升變化:其中的A分量在y方向進(jìn)行平移,B分量在y方向進(jìn)行
2021-07-07 06:54:44
步進(jìn)電機(jī)與伺服電機(jī)對(duì)比分析采用閉環(huán)技術(shù)的步進(jìn)電機(jī)
2021-02-05 06:05:47
功能,可涵蓋機(jī)械的剛性不足,并且系統(tǒng)內(nèi)部具有頻率解析機(jī)能(FFT),可檢測出機(jī)械的共振點(diǎn),便于系統(tǒng)調(diào)整。3、矩頻特性不同步進(jìn)電機(jī)的輸出力矩隨轉(zhuǎn)速升高而下降,且在較高轉(zhuǎn)速時(shí)會(huì)急劇下降,所以其最高工作轉(zhuǎn)速
2018-09-26 10:35:33
步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別工作原理控制方式工作設(shè)備和工作流程低頻特性不同矩頻特性不同過載能力不同速度響應(yīng)性能不同出處 》》》》》》》》》》》》》工作原理步進(jìn)電機(jī): 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移
2021-06-28 09:31:00
條件下測得運(yùn)行中輸出力矩與脈沖頻率關(guān)系的曲線稱為電機(jī)矩頻特性,這是電機(jī)諸多動(dòng)態(tài)曲線中最重要的,也是電機(jī)選擇的根本依據(jù)。在低速時(shí)的電機(jī)力矩接近靜轉(zhuǎn)矩,隨著電機(jī)轉(zhuǎn)速增加,感應(yīng)電動(dòng)勢加大,削弱了外加電壓
2023-03-01 10:29:10
的。通常情況下,在同一篇文章或同一本書,上述三個(gè)名詞只采用一個(gè),很少見到同時(shí)采用兩個(gè)或以上的。在步進(jìn)電機(jī)中都是指步進(jìn)電機(jī)中轉(zhuǎn)子繞組產(chǎn)生的可以用來帶動(dòng)機(jī)械負(fù)載的驅(qū)動(dòng)“矩”。所謂“矩”是指作用力和支點(diǎn)與力作用方向相垂直的距離的乘積。步進(jìn)電機(jī)中的力矩(g.cm),轉(zhuǎn)矩(n.m),扭矩(kg.m)有什么區(qū)別?對(duì)于杠
2021-09-15 06:01:52
頻率。 5) 最大空載的運(yùn)行頻率: 電機(jī)在某種驅(qū)動(dòng)形式,電壓及額定電流下,電機(jī)不帶負(fù)載的最高轉(zhuǎn)速頻率。 6) 運(yùn)行矩頻特性: 電機(jī)在某種測試條件下測得運(yùn)行中輸出力矩與頻率關(guān)系的曲線稱為運(yùn)行矩頻
2023-03-01 10:41:08
現(xiàn)象:步進(jìn)電機(jī)轉(zhuǎn)速慢的情況下會(huì)產(chǎn)生震動(dòng)原因:本身的兩個(gè)特性:矩頻特性、低頻特性(1) 矩頻特性:研控57步進(jìn)電機(jī)啟動(dòng)時(shí)脈沖頻率過高,電機(jī)輸出扭矩較小,負(fù)載較重時(shí)可能會(huì)丟步,從而產(chǎn)生震動(dòng)。選步進(jìn)電機(jī)
2021-06-28 09:05:38
的余量保證其運(yùn)行可。在實(shí)際工作過程中,各種頻率下的負(fù)載力矩必須在矩頻特性曲線的范圍內(nèi)。一般地說最大靜力矩的電機(jī),負(fù)載力矩大。步進(jìn)電機(jī)力矩計(jì)算方法,選擇步進(jìn)電機(jī)需要進(jìn)行以下計(jì)算:首先是計(jì)算齒輪的減速比根據(jù)...
2021-09-03 07:16:10
矩一樣的電機(jī),由于電流參數(shù)不同,其運(yùn)行特性差別很大,可依據(jù)矩頻特性曲線圖,判斷電機(jī)的電流(參考驅(qū)動(dòng)電源、及驅(qū)動(dòng)電壓)綜上所述選擇電機(jī)一般應(yīng)遵循以下步驟:4、力矩與功率換算步進(jìn)電機(jī)一般在較大
2014-01-21 15:17:44
,靜力矩一旦選定,電機(jī)的機(jī)座及長度便能確定下來(幾何尺寸)3、電流的選擇 靜力矩一樣的電機(jī),由于電流參數(shù)不同,其運(yùn)行特性差別很大,可依據(jù)矩頻特性曲線圖,判斷電機(jī)的電流(參考驅(qū)動(dòng)電源、及驅(qū)動(dòng)電壓) 綜上所述
2018-11-26 16:58:21
步進(jìn)電機(jī)和伺服電機(jī)對(duì)比分析哪個(gè)好?
2021-10-13 08:15:46
步進(jìn)電機(jī)和伺服電機(jī)控制的方式有何不同?步進(jìn)電機(jī)和伺服電機(jī)的低頻特性有何不同?
2021-09-28 07:55:48
步進(jìn)電機(jī)基礎(chǔ)(3.1)-步進(jìn)電機(jī)的原理與特性之基礎(chǔ)理論前言基本信息公式前言說明步進(jìn)電機(jī)的原理與特性之基礎(chǔ)理論3. 1 基礎(chǔ)理論1. 轉(zhuǎn)矩的產(chǎn)生及負(fù)載角1) PM型電機(jī)的轉(zhuǎn)矩及負(fù)載角2) VR型電機(jī)
2021-06-30 07:21:55
步進(jìn)電機(jī)介紹步進(jìn)電機(jī)的主要構(gòu)造步進(jìn)電機(jī)的工作原理步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)控制步進(jìn)電機(jī)的主要特性
2021-03-02 07:31:08
我是剛剛接觸步進(jìn)電機(jī),想知道步進(jìn)電機(jī)有哪些特性,我公司是賣步進(jìn)電機(jī)和德國MEYLE編碼器,我一直不會(huì)區(qū)分兩種產(chǎn)品的特性和功能。求助大神幫忙解說?
2014-06-16 14:53:30
步進(jìn)電機(jī)基礎(chǔ)(6.1)-步進(jìn)電機(jī)的特性測量方法-靜態(tài)特性前言基本信息前言說明說明6.1 靜態(tài)特性1 . 靜態(tài)轉(zhuǎn)矩特性2. 靜 態(tài) 轉(zhuǎn) 矩 特 性 測 量1.轉(zhuǎn)矩表:2. 滑輪重量法:3. 應(yīng)力計(jì)
2021-07-07 07:28:34
步進(jìn)電機(jī)基礎(chǔ)(6.2)-步進(jìn)電機(jī)的特性測量方法-動(dòng)態(tài)特性的測量法前言基本信息前言說明6.1 靜態(tài)特性1 . 滑輪平衡法前言基本信息名稱描述說明教材名稱步進(jìn)電機(jī)應(yīng)用技術(shù)作者坂本正文譯者王自強(qiáng)前言
2021-07-08 07:46:31
:電機(jī)在某種測試條件下測得運(yùn)行中輸出力矩與頻率關(guān)系的曲線稱為運(yùn)行矩頻特性,這是電機(jī)諸多動(dòng)態(tài)曲線中最重要的,也是電機(jī)選擇的根本。 其它特性還有慣頻特性、起動(dòng)頻率特性等。 電機(jī)一旦選定,電機(jī)的靜力矩確定,而
2018-10-12 11:07:38
步進(jìn)電機(jī)的原理與特性之基本特性 相關(guān)資料分享,步進(jìn)電機(jī)基礎(chǔ)(3.2)-步進(jìn)電機(jī)的原理與特性之基本特性前言基本信息公式前言說明基本特性1. 靜態(tài)轉(zhuǎn)矩特性2. 動(dòng)態(tài)轉(zhuǎn)矩特性1) 脈沖頻率-轉(zhuǎn)矩特性2
2021-07-08 08:27:07
過程中,各種頻率下的負(fù)載力矩必須在矩頻特性曲線的范圍內(nèi)。一般地說最大靜力矩Mjmax大的電機(jī),負(fù)載力矩大。2、選擇步進(jìn)電機(jī)時(shí),應(yīng)使步距角和機(jī)械系統(tǒng)匹配,這樣可以得到機(jī)床所需的脈沖當(dāng)量。在機(jī)械傳動(dòng)
2018-10-12 09:50:49
下來(幾何尺寸)3、電流的選擇靜力矩一樣的電機(jī),由于電流參數(shù)不同,其運(yùn)行特性差別很大,可依據(jù)矩頻特性曲線圖,判斷電機(jī)的電流(參考驅(qū)動(dòng)電源、及驅(qū)動(dòng)電壓)綜上所述選擇電機(jī)一般應(yīng)遵循以下步驟: 4、力矩與功率
2011-08-16 08:35:44
電機(jī)特性曲線
2012-02-01 21:34:53
步進(jìn)電機(jī)的步距角是1.8°,三相步進(jìn)電機(jī)的步距角是1.2°,五相步進(jìn)電機(jī)的步距角是0.72°。2、低頻特性:步進(jìn)電機(jī)低速運(yùn)轉(zhuǎn)時(shí)會(huì)出現(xiàn)低頻振動(dòng)的現(xiàn)象;伺服電機(jī)運(yùn)轉(zhuǎn)時(shí)非常平穩(wěn)。3、矩頻特性:步進(jìn)電機(jī)的轉(zhuǎn)矩
2021-06-28 07:57:52
不同的幅頻和相頻曲線”,但并沒有給出計(jì)算公式,且后面的圖例中也沒有給出相頻特性。故在此求教,能否給出AD606幅頻和相頻曲線的計(jì)算公式,或典型相頻特性曲線?謝謝!
2019-01-17 13:44:27
C語言是如何控制步進(jìn)電機(jī)的曲線與直線加速的?有哪些實(shí)現(xiàn)步驟?
2021-12-20 06:10:58
的共振點(diǎn)便于系統(tǒng)調(diào)整。4. 矩頻特性不同步進(jìn)電機(jī)的輸出力矩會(huì)隨轉(zhuǎn)速升高而下降,交流伺服電機(jī)為恒力矩輸出,5. 過載能力不同步進(jìn)電機(jī)一般不具有過載能力,而交流電機(jī)具有較強(qiáng)的過載能力。6. 運(yùn)行性能不同步進(jìn)
2017-07-13 13:18:49
的負(fù)載力矩必須在矩頻特性曲線的范圍內(nèi)。一般地說最大靜力矩Mjmax大的電機(jī),負(fù)載力矩大。 選擇步進(jìn)電機(jī)時(shí),應(yīng)使步距角和機(jī)械系統(tǒng)匹配,這樣可以得到機(jī)床所需的脈沖當(dāng)量。在機(jī)械傳動(dòng)過程中為了使得有更小的脈沖
2016-12-25 12:53:43
出現(xiàn)振動(dòng)現(xiàn)象。交流伺服系統(tǒng)具有共振抑制功能,可涵蓋機(jī)械的剛性不足,并且系統(tǒng)內(nèi)部具有頻率解析機(jī)能(FFT),可檢測出機(jī)械的共振點(diǎn),便于系統(tǒng)調(diào)整。三、矩頻特性不同步進(jìn)電機(jī)的輸出力矩隨轉(zhuǎn)速升高而下降,且在較高
2016-08-19 22:01:04
差別很大,可依據(jù)矩頻特性曲線圖,判斷電機(jī)的電流(參考驅(qū)動(dòng)電源以及驅(qū)動(dòng)電壓)。5、力矩與動(dòng)率換算步進(jìn)電機(jī)一般在較大范圍內(nèi)調(diào)速使用,其功率是變化的,一般只用力矩來衡量,力矩與功率換算如下:P=T*n*2πr/60其中P為功率,單位為瓦;N為轉(zhuǎn)速,單位是轉(zhuǎn)、分鐘;T為力矩,單位是牛頓*米。
2016-10-01 14:05:01
某3相步進(jìn)電機(jī)的矩頻特性曲線所謂矩頻特性曲線,是指步進(jìn)電機(jī)扭矩與輸入信號(hào)頻率關(guān)系的曲線,其實(shí)相當(dāng)于其他電機(jī)如伺服電機(jī)的轉(zhuǎn)矩-轉(zhuǎn)速特性曲線。從曲線上可以看出,隨著輸入頻率的升高,步進(jìn)電機(jī)扭矩下降很快
2016-01-18 14:07:53
三極管特性曲線詳細(xì)分析,特性曲線看不懂,
2015-06-29 16:34:40
步進(jìn)電機(jī)基礎(chǔ)(8.3)-步進(jìn)電機(jī)的問題解決方案-改善暫態(tài)特性的解決方法前言基本信息前言說明8.3 改善暫態(tài)特性的解決方法1. 利用阻尼器的改善2 . 利用驅(qū)動(dòng)電路的改善(1) 半步進(jìn)1-2相激磁
2021-07-07 06:27:00
的步進(jìn)角,給一個(gè)脈沖,它就轉(zhuǎn)動(dòng)一個(gè)步進(jìn)角,于是它取名:步進(jìn)電機(jī)第二個(gè)問題:步進(jìn)電機(jī)的特性?在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收...
2021-07-08 10:01:44
平穩(wěn),即使在低速時(shí)也不會(huì)出現(xiàn)振動(dòng)現(xiàn)象。交流伺服系統(tǒng)具有共振抑制功能,可涵蓋機(jī)械的剛性不足,并且系統(tǒng)內(nèi)部具有頻率解析機(jī)能(FFT),可檢測出機(jī)械的共振點(diǎn),便于系統(tǒng)調(diào)整。三、矩頻特性不同步進(jìn)電機(jī)的輸出力矩隨轉(zhuǎn)速
2018-09-04 10:08:37
倍速鏈輸送具有哪些優(yōu)點(diǎn)?伺服電機(jī)和步進(jìn)電機(jī)的控制方式有何區(qū)別?伺服電機(jī)和步進(jìn)電機(jī)的過載特性有何區(qū)別?
2021-10-11 06:31:15
開閉環(huán) Open closed loop——————關(guān)于伺服電機(jī)和步進(jìn)電機(jī)的部分原理差異步進(jìn)電機(jī)與伺服電機(jī)的本質(zhì)都是通過驅(qū)動(dòng)器控制電機(jī),但是在控制原理上有不同之處。Step and servo
2021-06-28 07:10:10
關(guān)系的曲線稱為運(yùn)行矩頻特性,這是電機(jī)諸多動(dòng)態(tài)曲線中最重要的,也是電機(jī)選擇的根本依據(jù)。如下圖所示:其它特性還有慣頻特性、起動(dòng)頻率特性等。電機(jī)一旦選定,電機(jī)的靜力矩確定,而動(dòng)態(tài)力矩卻不然,電機(jī)的動(dòng)態(tài)力矩
2018-08-28 15:36:30
項(xiàng)目評(píng)估,要用到步進(jìn)電機(jī),選型?1、什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(即步矩角
2021-07-08 07:12:06
步進(jìn)電機(jī)與伺服電機(jī)的工作原理是什么?單/雙極性步進(jìn)電機(jī)對(duì)比分析哪個(gè)好?步進(jìn)電機(jī)有哪些基本參數(shù)?
2021-09-24 08:08:37
使用單一電源供電,驅(qū)動(dòng)五相電機(jī)時(shí)采用三相勵(lì)磁PWM輸出方式,改善了驅(qū)動(dòng)的矩頻特性;同時(shí),此驅(qū)動(dòng)器在不脈沖細(xì)分的情形下,可以驅(qū)動(dòng)二、三、四相步進(jìn)電機(jī)。此設(shè)計(jì)在電腦繡花機(jī)系統(tǒng)中投入應(yīng)用,并取得良好的效果.
2011-03-07 12:15:26
可能是更復(fù)雜的系統(tǒng)。但是它們對(duì)信號(hào)進(jìn)行調(diào)理的最重要的特性就是頻率響應(yīng)特性曲線。大部分時(shí)候,我們需要了解它的頻率響應(yīng)曲線來進(jìn)行系統(tǒng)設(shè)計(jì)和驗(yàn)證。LOTO示波器的上位機(jī)軟件具備了掃頻和頻響特性曲線測繪功能。如果
2022-09-06 15:55:55
轉(zhuǎn)速頻率。3.運(yùn)行矩頻特性:電機(jī)在某種測試條件下測得運(yùn)行中輸出力矩與頻率關(guān)系的曲線稱為運(yùn)行矩頻特性,這是電機(jī)諸多動(dòng)態(tài)曲線中最重要的,也是電機(jī)選擇的根本依據(jù)。其它特性還有慣頻特性、起動(dòng)頻率特性等。 電機(jī)一旦
2022-01-11 07:43:33
求教,如何在matlab-simulink環(huán)境下獲得直流電機(jī)的機(jī)械特性曲線,不要用數(shù)據(jù)擬合的曲線。比如在上面的仿真中如何獲得電機(jī)的轉(zhuǎn)矩-轉(zhuǎn)速的機(jī)械特性曲線?
2013-03-21 08:35:35
上也反映了電機(jī)的能力,近似于傳統(tǒng)電機(jī)所稱的“功率”,也是影響步進(jìn)電機(jī)性能的重要因素。 4、距頻特性 步進(jìn)電機(jī)在某種測試條件下測得運(yùn)行中輸出力矩與頻率關(guān)系的曲線稱為運(yùn)行矩頻特性,這是電機(jī)諸多動(dòng)態(tài)曲線
2023-03-10 10:33:09
怎么實(shí)現(xiàn)步進(jìn)電機(jī)S型曲線加減速算法?
2021-10-12 10:02:51
實(shí)時(shí)生成步進(jìn)電機(jī)速度曲線一種用于步進(jìn)電機(jī)加速度的新算法可以實(shí)現(xiàn)速度曲線的實(shí)時(shí)參數(shù)化和計(jì)算。該算法可以在低端微控制器上運(yùn)行,只使用簡單的定點(diǎn)算術(shù)運(yùn)算并且不使用數(shù)據(jù)表。它以恒定的加速度和減速度形成線性
2021-07-07 07:18:49
目錄1. 概述2. 硬件設(shè)計(jì)3. 軟件設(shè)計(jì)1. 概述步進(jìn)電機(jī)的主要特性:步進(jìn)電機(jī)必須驅(qū)動(dòng)才可以運(yùn)轉(zhuǎn),驅(qū)動(dòng)信號(hào)必須為脈沖信號(hào),無脈沖電機(jī)靜止,若加入適當(dāng)?shù)拿}沖信號(hào),則會(huì)以一定的角度(稱為步角)轉(zhuǎn)動(dòng)
2021-09-16 08:25:45
適用于對(duì)于加減速平穩(wěn)性要求較高的場合。每個(gè)頻率下的最大輸出力矩可以由電機(jī)矩頻特性曲線得到,但是一般的矩頻特性曲線是整體呈下降趨勢的非線性曲線TM=TM0-af 這種近似的關(guān)系要根據(jù)電機(jī)自身的矩頻特性曲線
2016-01-12 11:04:45
請問一下步進(jìn)電機(jī)有哪些特性呢?
2021-10-27 07:33:08
你好,LTSpice用AC小信號(hào)分析完之后如何查看幅頻和相頻特性曲線呢?比如我想查看輸入信號(hào)Vi和Vo的增益和相位關(guān)系,是否按照以下公式:
20*log10(abs(vo)/abs(vi))。
按照
2023-11-15 06:50:47
伺服電機(jī)具有哪些缺陷?閉環(huán)步進(jìn)電機(jī)與伺服電機(jī)對(duì)比分析哪個(gè)好?
2021-09-27 08:13:44
什么是混合伺服?閉環(huán)步進(jìn)電機(jī)的基本特性有哪些?
2021-10-09 06:09:11
單相永磁步進(jìn)電機(jī)特性的數(shù)值計(jì)算與分析:介紹了單相步進(jìn)電機(jī)結(jié)構(gòu)簡單控制方便等更多的特點(diǎn)。
2009-04-02 14:50:10 23
23 步進(jìn)電機(jī)是一種易于精確控制的電機(jī),由于其良好的性能而受到廣泛的應(yīng)用。其控制方法也多種多樣。介紹了8051系列單片機(jī)對(duì)步進(jìn)電機(jī)的控制方法,并且提出和對(duì)比了幾種步進(jìn)電機(jī)
2009-11-07 15:11:00136 步進(jìn)電機(jī)加速的新算法能夠?qū)⑺俣?b class="flag-6" style="color: red">曲線參數(shù)化并進(jìn)行實(shí)時(shí)計(jì)算。這種算法能在低端微控制器上運(yùn)行,只采用簡單的定點(diǎn)運(yùn)算,沒有數(shù)據(jù)表。它為恒加速和減速線性上升開發(fā)出一種
2010-01-02 11:09:53206 步進(jìn)電機(jī)加速曲線S曲線,能根據(jù)實(shí)際需要生成電機(jī)開始加速到最大速度期間脈沖頻率,結(jié)果能生成EXCEL
2016-01-19 14:13:2456 基于S曲線的步進(jìn)電機(jī)加減速的控制,下來看看
2016-05-03 13:52:5930 步進(jìn)電機(jī)控制系統(tǒng)建模及運(yùn)行曲線仿真,下來看看
2016-05-04 14:09:5618 步進(jìn)電機(jī)S曲線驅(qū)動(dòng)程序,可以用作步進(jìn)電機(jī)的加減速控制。
2017-08-31 11:06:26106 介紹一種基于步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)矩頻特性的“計(jì)時(shí)”測試?yán)碚摚兄频?b class="flag-6" style="color: red">步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)矩頻特性測試系統(tǒng)。該系統(tǒng)由自制的整形電路、異或檢相器和MCS8098單片機(jī)組成。
2017-08-31 16:08:235 是指在單脈沖、電流不變的情況下,步進(jìn)電動(dòng)機(jī)的靜轉(zhuǎn)矩T與轉(zhuǎn)子失調(diào)角θ之間的關(guān)系曲線T=f。矩角特性是步進(jìn)電動(dòng)機(jī)的基本特性,正確而方便地測定這一特性是很重要的,但至今仍感到困難,人們早就想通過旋轉(zhuǎn)感應(yīng)電壓,來測出步進(jìn)電動(dòng)機(jī)的矩角特性。
2017-11-21 16:46:0812317 
以前自己有研究過S曲線加減速,步進(jìn)電機(jī)盡量都跑這種曲線,原因就是當(dāng)電機(jī)驅(qū)動(dòng)器給電機(jī)一個(gè)較高的頻率的時(shí)候,步進(jìn)電機(jī)很可能反應(yīng)不過來,造成堵轉(zhuǎn),或者這個(gè)頻率變化的斜率太大剛由低頻起轉(zhuǎn)突然就變到高頻了一樣
2017-11-27 18:36:259 的物理特性出發(fā),研究了步進(jìn)電機(jī)的加速過程,并開發(fā)出一款步進(jìn)電機(jī)加速曲線生成工具軟件,該工具軟件可以根據(jù)設(shè)定的步進(jìn)電機(jī)參數(shù)和加速過程需求參數(shù)自動(dòng)地生成加速曲線數(shù)據(jù),并且可以方便地導(dǎo)出成.C和.H文件供單片機(jī)程
2018-01-24 15:38:142 步進(jìn)電機(jī)加速曲線計(jì)算器
2018-02-05 11:18:3710 步進(jìn)拖動(dòng)的特性由驅(qū)動(dòng)線路、機(jī)械結(jié)構(gòu)和步進(jìn)電動(dòng)機(jī)各自的特性所決定。步進(jìn)電機(jī)的工作狀態(tài)可以分為靜態(tài)、穩(wěn)態(tài)和過渡態(tài)三種。
2018-02-07 12:48:0811718 步進(jìn)電機(jī)的正反轉(zhuǎn)控制是通過改變電機(jī)通電相序來實(shí)現(xiàn)的。為達(dá)到對(duì)步進(jìn)電機(jī)啟/停運(yùn)行過程的快速和精確控制,從其動(dòng)力學(xué)特性出發(fā),推導(dǎo)出符合步進(jìn)電機(jī)矩頻特性的曲線應(yīng)該是指數(shù)型運(yùn)行曲線,并將這一曲線量化后,存入EEPROM。步進(jìn)電機(jī)在運(yùn)行過程中,每個(gè)通電狀態(tài)保持時(shí)間的長短,由當(dāng)前速度對(duì)應(yīng)的延時(shí)時(shí)間值決定。
2018-08-24 15:39:181420 
針對(duì)不同約束條件下步進(jìn)電機(jī)加減速的控制問題,首先分析了 S 曲線算法原理,尋找 S 曲線算法與其它常見的步進(jìn)電機(jī)運(yùn)動(dòng)控制算法之間的聯(lián)系。然后在分析 S 曲線傳統(tǒng)的七段模型后,提出了基于 S 曲線
2019-03-13 08:00:000 本文檔的主要內(nèi)容詳細(xì)介紹的是STM32步進(jìn)電機(jī)S曲線加速的源代碼資料免費(fèi)下載。
2019-04-28 08:00:0062 由于步進(jìn)電機(jī)轉(zhuǎn)子慣量作用,即使空載運(yùn)行一步,也會(huì)產(chǎn)生超越角(over-shoot),并在超越角與返回角(under-shoot)之間來回振蕩,經(jīng)過哀減后靜止于所定角度,此為步進(jìn)電機(jī)暫態(tài)響應(yīng)特性。
2019-10-08 16:14:271132 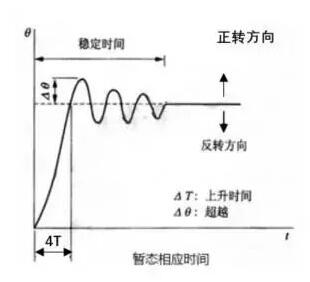
步進(jìn)電機(jī)的線圈通直流電時(shí),帶負(fù)載轉(zhuǎn)子的電磁轉(zhuǎn)矩(與負(fù)載轉(zhuǎn)矩平衡而產(chǎn)生的恢復(fù)電磁轉(zhuǎn)矩稱為靜態(tài)轉(zhuǎn)矩或靜止轉(zhuǎn)矩)與轉(zhuǎn)子功率角的關(guān)系稱為角度-靜止轉(zhuǎn)矩特性,這就是電機(jī)的靜態(tài)特性。
2019-12-11 09:02:0510552 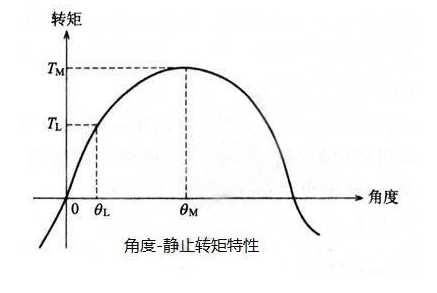
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
2021-03-02 17:45:543639 “牽入轉(zhuǎn)矩特性”也稱為“啟動(dòng)轉(zhuǎn)矩特性”,表示可以使停止?fàn)顟B(tài)的步進(jìn)電機(jī)啟動(dòng)的頻率(脈沖頻率)與負(fù)載轉(zhuǎn)矩之間的關(guān)系。牽入轉(zhuǎn)矩曲線內(nèi)的區(qū)域稱為“自啟動(dòng)區(qū)域”,是可以啟動(dòng)、停止和反轉(zhuǎn)的區(qū)域。另外,將負(fù)載轉(zhuǎn)矩為零的頻率=可以啟動(dòng)步進(jìn)電機(jī)的極限頻率稱為“最大自啟動(dòng)頻率”。如圖所示,頻率越高,可啟動(dòng)的負(fù)載轉(zhuǎn)矩越低。
2021-06-12 16:27:005566 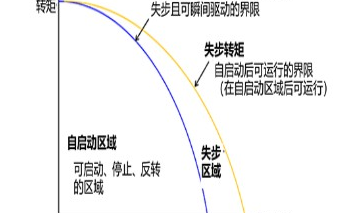
液壓泵的特性曲線包括一般特性曲線,全特性曲線和無因次特性曲線,理解這些特征曲線有利于力士樂柱塞泵的分析,開發(fā),使用和維護(hù)。
2021-10-08 14:14:062002 之前做電機(jī)相關(guān)的項(xiàng)目比較少,最近有個(gè)項(xiàng)目涉及到步進(jìn)電機(jī)的精確控制,參考了一些資料研究了一下S型曲線加減速,這里總結(jié)一下分享給大家。硬件是:STM32+驅(qū)動(dòng)器+步進(jìn)電機(jī)。STM32定時(shí)器輸...
2021-11-25 10:51:1284 在新開始的“步進(jìn)電機(jī)”篇系列文章中,將介紹步進(jìn)電機(jī)的結(jié)構(gòu)、步進(jìn)電機(jī)的工作原理、步進(jìn)電機(jī)的特性和步進(jìn)電機(jī)的驅(qū)動(dòng)方法。什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。
2023-02-24 09:51:091897 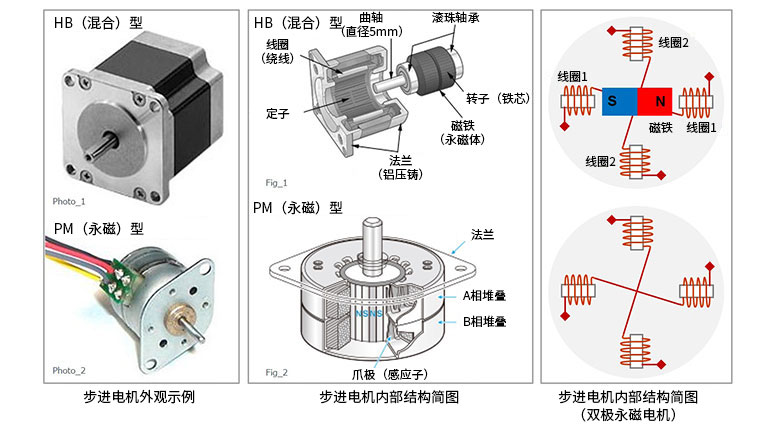
本文將介紹步進(jìn)電機(jī)的基本特性。步進(jìn)電機(jī)的基本特性:下圖顯示了步進(jìn)電機(jī)的轉(zhuǎn)矩和速度之間的關(guān)系。縱軸為轉(zhuǎn)矩,橫軸為脈沖頻率。
2023-02-24 09:51:101168 
步進(jìn)電機(jī)的速度 - 扭矩曲線
2023-03-07 17:09:217360 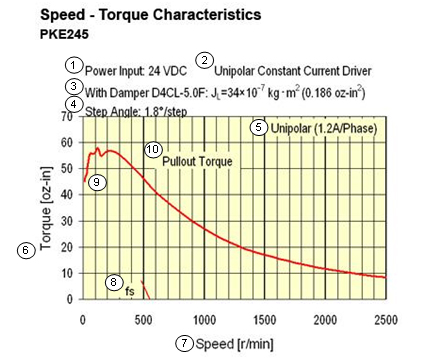
步進(jìn)電機(jī)的頻率特性主要指其轉(zhuǎn)速與輸入脈沖信號(hào)頻率之間的關(guān)系。由于步進(jìn)電機(jī)的運(yùn)動(dòng)是由輸入脈沖信號(hào)控制的,因此輸入脈沖信號(hào)的頻率會(huì)直接影響步進(jìn)電機(jī)的轉(zhuǎn)速和運(yùn)動(dòng)精度。
2023-03-08 14:24:331240 另外,步進(jìn)電機(jī)的牽入轉(zhuǎn)矩特性和失步轉(zhuǎn)矩特性會(huì)因勵(lì)磁方法和驅(qū)動(dòng)電路而異。因此,對(duì)步進(jìn)電機(jī)的特性研究中,需要進(jìn)行包括驅(qū)動(dòng)方法和電路在內(nèi)的整體評(píng)估。
2023-03-09 11:52:28454 
基礎(chǔ)參數(shù)介紹 轉(zhuǎn)矩 相、極 步距角、極性 步進(jìn)方式 四、步進(jìn)電機(jī)特性 矩角特性 靜態(tài)特性 靜態(tài)穩(wěn)定區(qū) 多拍的矩角特性族動(dòng)態(tài)特性 轉(zhuǎn)子的震蕩過程 共振現(xiàn)象 共振的解決方案矩頻特性與起動(dòng)慣頻特性 該文章主要介
2023-03-21 14:32:299 步進(jìn)電機(jī)基礎(chǔ)(3.2)-步進(jìn)電機(jī)的原理與特性之基本特性 前言 基本信息 公式 前言說明 基本特性 1. 靜態(tài)轉(zhuǎn)矩特性 2. 動(dòng)態(tài)轉(zhuǎn)矩特性 1) 脈沖頻率-轉(zhuǎn)矩特性 2) 脈沖頻率-慣量特性3. 暫態(tài)
2023-03-23 13:51:012 本章為步進(jìn)電機(jī)的基礎(chǔ)理論,主要講解轉(zhuǎn)矩是如何產(chǎn)生的?如何用數(shù)學(xué)公式表示。并且對(duì)步進(jìn)電機(jī)的基本特性:靜態(tài)特性、動(dòng)態(tài)特性、暫態(tài)特性加以說明,以便讀者更好地理解并掌握此三種基 本特性。
步進(jìn)電機(jī)可視
2023-03-23 10:54:3769 為了評(píng)估步進(jìn)電機(jī)的特性必須要有必要的測量方法。本章針對(duì)步進(jìn)電機(jī)的基本特性①靜態(tài)特性:靜態(tài)轉(zhuǎn)矩特性,步進(jìn)角度精度;②動(dòng)態(tài)特性:速度-轉(zhuǎn)矩特性;③暫態(tài)特件;介紹各種測量方法。并且進(jìn)一步
說明引起步進(jìn)電機(jī)產(chǎn)生振動(dòng)和噪音的原因,以及振動(dòng)和噪音的測量方法。
2023-03-23 10:00:441 步進(jìn)電機(jī)基礎(chǔ)(8.3)-步進(jìn)電機(jī)的問題解決方案-改善暫態(tài)特性的解決方法 前言 基本信息 前言說明 8.3 改善暫態(tài)特性的解決方法 1. 利用阻尼器的改善 2 . 利用驅(qū)動(dòng)電路的改善 (1) 半步進(jìn)
2023-03-24 11:05:350 根據(jù)上一節(jié)內(nèi)容,已經(jīng)計(jì)算了一條任意S曲線的函數(shù)。在步進(jìn)電機(jī)S曲線加減速的控制中,需要的S曲線如圖1所示,橫軸為時(shí)間,縱軸為角速度,其中w0為起始角速度,w1為終止角速度
2023-10-26 15:02:43791 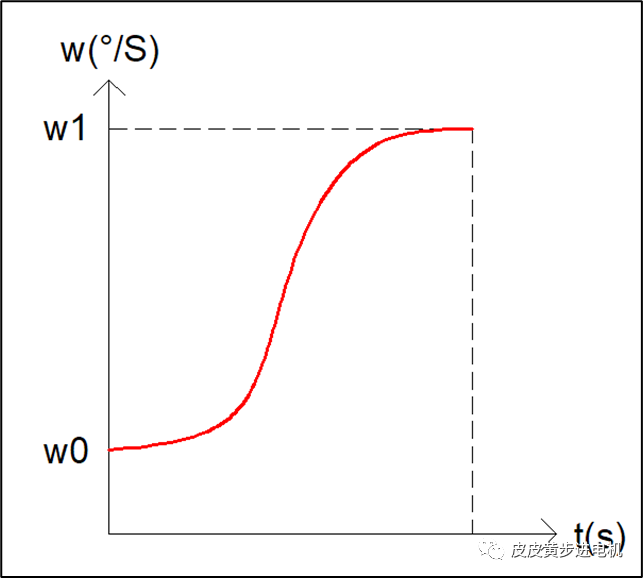
等,因此在各種自動(dòng)化設(shè)備和精密儀器中得到廣泛應(yīng)用。 步進(jìn)電機(jī)的特性曲線圖揭示了其轉(zhuǎn)矩與脈沖頻率(或稱為驅(qū)動(dòng)頻率)之間的關(guān)系。在這張圖中,垂直軸代表轉(zhuǎn)矩,而水平軸代表脈沖頻率,用每秒脈沖數(shù)(pps)來度量。圖表中的藍(lán)
2024-02-06 09:33:21228 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論