引言:和降壓控制器類似,升壓控制器也有多種工作模式,在中/重負載模式工作時,控制器以固定頻率連續規律工作,在輕載模式下則有多種模式可選,本節簡述控制器的多種工作模式和其多相使用方式。
2023-10-26 14:41:38 873
873 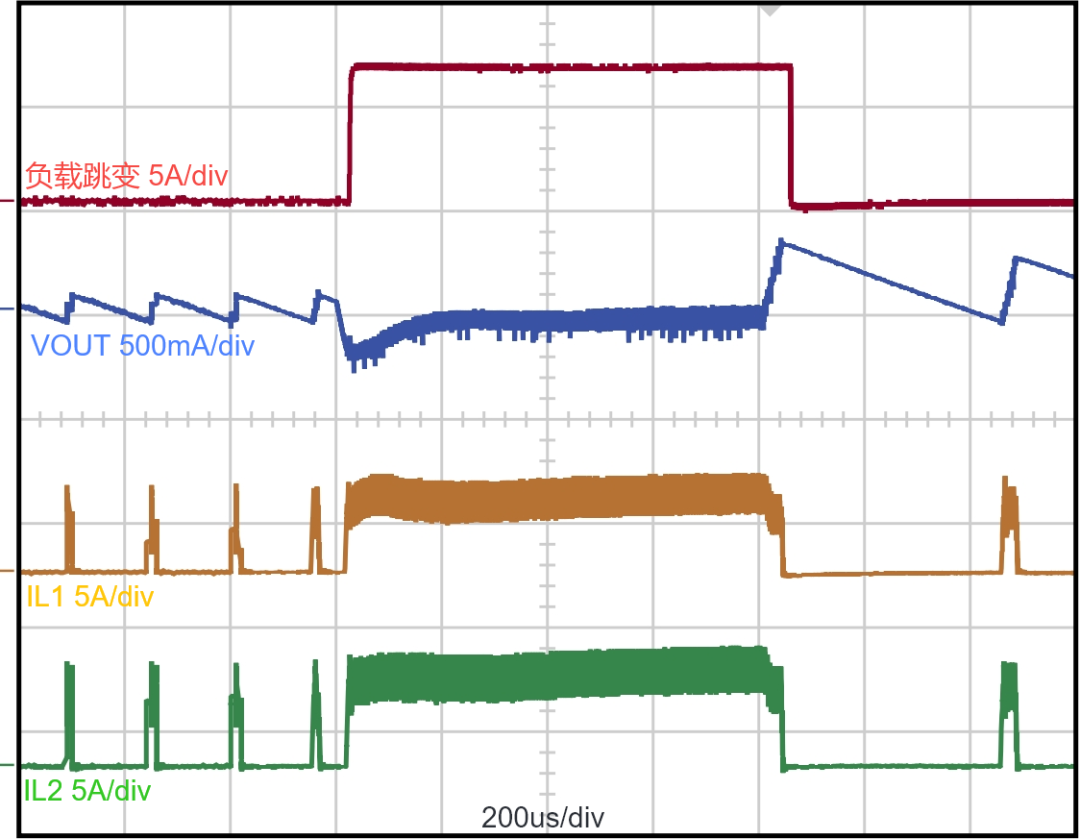
88/86的兩種工作模式的配置一. 最小與最大的工作模式最小工作模式MN/MX* = 1 (高電平)構成小規模的單處理機系統 (只有個微處理器 8088/8086)由CPU本身提供控制總線最大工作
2021-12-08 07:30:13
的恢復力機制。 在典型的超限恢復時間為100毫秒。這種傳感器類型的大熱質量使設備對熱瞬變相當不敏感。 伺服壓力傳感器 圖顯示了基于上述概念的伺服概念是如何應用于制造極高精度壓力傳感器的。 伺服
2019-10-09 14:50:04
前言??上篇中詳細闡述了經典的自抗擾控制算法的原理,本篇將圍繞兩種ADRC算法展開,針對擴張狀態觀測器的參數整定問題進行詳解,同時,對跟蹤微分器的幾個重要應用進行介紹。兩種典型的ADRC算法??自抗
2021-09-07 08:02:01
伺服電機控制器與步進電機控制器有啥不一樣?
2021-02-25 07:42:10
模式。當負載慣量已知時,由用戶輸入目標剛性和慣量律,系統自動整定參數。負載變化范圍不能太大。:伺服電機控制器的參數整定翻譯自 SureServo Manual
2018-11-01 11:14:10
轉速調節,而變頻電機則是利用變頻器控制電機的轉速,可以實現更加精細的調節。這兩種調節方式都能使電機工作在最佳狀態下,從而提高其效率和壽命。 其次,兩種電機均具有較小的體積和噪音。伺服電機相對
2023-03-07 15:24:57
伺服電機的三種控制方式
2021-01-21 06:45:01
Mode):顧名思義,用于尋零輪廓位置模式(Profile Position Mode):上位機給定目標絕對/相對位置、速度、加減速參數,伺服內部的軌跡發生器根據以上參數生成目標位置曲線指令,經由驅動器內部實現三環控制輪廓速度模式(Profile Velocity Mode):上位機給定目標速度
2021-06-27 06:41:51
伺服驅動器工作原理一、伺服驅動器簡介 伺服驅動器(servo drives)又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服
2017-03-20 20:11:56
伺服驅動器簡單地說:是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。一般是通過位置、速度和力矩三種方式對伺服馬達進行控制,實現
2021-06-28 08:16:24
直流無刷伺服電機驅動器RMC-DC36.10S1廣泛應用于醫療器械、機器人、儀器儀表、雕刻機、自動控制的教學設備,激光打標機,激光雕刻機、半導體設備、小型數控機床等需要高精度控制的設備上。 DC無
2011-05-11 09:30:05
描述LM5021-2 是一種可工作于 CCM 和 DCM 的離線控制器。脈沖跳躍模式可改善此隔離型反激式控制器的效率,并在大部分負載條件下使曲線平坦化。此外還適用于電力線通信 PSU。主要特色電源
2018-12-13 13:45:33
內核)兩種情況下發生,一般程序一開始都是運行于用戶態,當程序需要使用系統資源時,就必須通過調用軟中斷進入內核態。 每一種工作模式的R13-SP(堆棧指針寄存器,在堆棧操作中使用)都是獨立的。因此,對程序
2023-12-15 10:15:25
。 在程序運行的過程中,可以在兩種狀態之間進行相應的轉換。處理器工作狀態的轉變并不影響處理器的工作模式和相應寄存器中的內容。 CPU上電處于ARM狀態。 三、ARM體系的CPU有以下7種工作模式1
2017-10-25 16:55:35
Atmega48應用于電動自行車控制器方案
2012-08-20 08:42:58
的非同步Buck控制器,通常電感的電流工作于CCM連續電流模式,電感的平均電流即為輸出的負載電流。當負載電流降低時,電感的平均電流也將降低;當負載電流降低時一定值,變換器進入臨界電流模式。此時,若負載電流
2016-08-31 17:01:16
它們的優點及缺點。在實際的應用中,應該根據系統對輸出紋波和效率的具體要求來選取相應的工作模式。 1 跳脈沖模式 對于恒定頻率的常規的非同步Buck控制器,通常電感的電流工作于CCM連續電流模式,電感
2019-03-14 18:00:00
DP1040C是一款應用于 CAN 協議控制器和物理總線之間的接口芯片,可應用于卡車、公交、小汽車、工業控制等領域,速率可達到 1Mbps,具有在總線與 CAN 協議控制器之間進行差分信號傳輸的能力
2020-10-28 17:02:41
Flash控制器的主要的工作任務Flash控制器的兩種策略和方式
2021-02-23 07:31:10
和可靠性高,被廣泛應用于工業過程控制,尤其適用于可建立精確數學模型的確定性控制系統。在工程實際中,應用最為廣泛的調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節,它實際上是一種算法
2016-01-20 15:17:28
電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。速度控制一般都是有變頻器實現,用伺服電機做速度控制,一般是用于快速加減速或是速度精準控制的場合,因為相對于變頻器,伺服電機可以在幾毫...
2021-09-06 06:00:20
我們知道,SPI_NSS有兩種模式,SPI_NSS_Hard和SPI_NSS_Soft。SPI_NSS_Hard,硬件自動拉高拉低片選,在速率上是遠比軟件方式控制要高的,缺點是當STM32為主
2021-08-11 09:26:34
ADI HMC系列該系列支持SPI接口,有兩種通信MODE,SPI_OPEN_MODE和SPI_HMC_MODE。這兩種模式由軟件控制,根據上電時SCK和SEN誰先出現rise edge來選擇,如果
2021-11-05 07:03:31
TMCM1636伺服驅動控制器有何功能?TMCM1636伺服驅動控制器有哪些應用?
2021-10-08 08:32:46
1. 初步了解stm32F4有兩種CPU模式:特權模式和用戶模式。當發生異常或中斷時會進入到特權模式中stm32F4有兩個系統棧,一個是MSP,一個是PSP。CPU在用戶模式中使用PSP作為棧,當
2021-08-13 06:09:39
發的項目中去。項目描述:此項目意在對交流伺服電機的兩種信號模式進行整合,即差分與方向脈沖,整合到一個信號發生器中,并且能夠對信號的頻率,長度等進行設置,使電機能按照設定的順序動作進行運轉,從而完成交流伺服電機在工業場合的一些較為簡單的動作順序控制。
2015-07-03 19:28:38
。 Zeigler-Nichols方法:Zeigler-Nichols提出了用于調節PID控制器的閉環方法。這些是連續循環法和阻尼振蕩法。這兩種方法的程序是相同的,但振蕩行為是不同的。在這里,首先我們必須設置p-控制器常數Kp為特定
2020-09-01 17:58:40
高等諸多優點,經過發展,運動控制器幾乎應用于所有的工業企業中。運動控制器既可以應用于傳統機床的數控化改造,也可以應用于新型數控機床的設計,降低成本、節約能源并且提高效率。四元數致力于運動控制、圖像與視覺傳感
2021-08-02 10:04:58
為什么我的只有這兩種模式?設置那邊是三種
2019-09-09 01:56:53
伺服驅動器簡單地說:是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。一般是通過位置、速度和力矩三種方式對伺服馬達進行控制,實現
2021-06-28 08:06:46
USS是什么意思?USS通信與串口通信區別在什么地方?運動控制器PLC的結構是如何構成的?什么是伺服驅動器 ?
2021-06-28 08:03:17
分析閃存控制器的架構,首先得了解SSD。一般來說SSD的存儲介質分為兩種,一種是采用閃存(Flash芯片)作為存儲介質,另外一種是采用DRAM作為存儲介質。我們通常所說的SSD就是基于閃存的固態硬盤
2019-09-27 07:12:52
:set of set-point關節伺服控制,輪廓位置模式是最常用的模式,用于從一個點運動到另一個點(point to point),其也是控制模式中比較復雜的模式。該模式包含了兩個部分,軌跡規劃器
2021-06-28 07:07:53
在變頻器控制模式中,有無速度矢量傳感器模式,該模式又分為兩種,無感矢量0和無感矢量1,這兩種模式的本質原理是什么?對變頻器的控制電機性能和系統穩定性響應什么的有什么影響?具體應用上哪種方式更好一點,或者而言這兩種模式的優缺點是什么?更適合用于什么場合?針對不同功率的變頻器和電機?
2024-02-22 21:45:53
臺達PLC在使用Modbus通訊時有兩種模式:分別是Modbus—RTU和Modbus—ASCII,下面我們就這兩種模式分別舉例說明 。 Modbus—RTU模式說明 如下圖所示:PLC在
2023-03-16 17:51:01
常用四軸的兩種PID算法 這里主要講解的PID算法屬于一種線性控制器,這種控制器被廣泛應用于四軸上。要控制四軸,顯而易見的是控制它的角度,那么最簡單,同時也是最容易想到的一種控制策略就是角度單環PID控制器,系統框圖如圖所示:
2019-05-30 10:08:56
隨著顯示屏技術的不斷發展,真彩液晶顯示屏以其高分辨率、高對比度及高清晰度等優勢逐漸在嵌入式顯示系統中占據重要地位。目前,基于嵌入式平臺的LCD顯控技術的實現主要有兩種方式:ARM內嵌LCD控制器
2020-03-24 06:04:32
目前伺服控制器的設計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環境比較惡劣的條件如高溫高壓下DSP的應用效果會大打折扣,因此以FPGA為控制核心,對應用于機載三軸伺服控制平臺的控制器進行了設計與優化。
2019-07-16 07:41:04
目前伺服控制器的設計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環境比較惡劣的條件如高溫高壓下DSP的應用效果會大打折扣,因此以FPGA為控制核心,對應用于機載三軸伺服控制平臺的控制器進行了設計與優化。
2019-07-08 06:28:36
嗨, 如何在剪切模式下配置ST369。 在數據表中,我找到了以下配置:- 防剪裁模式- 動態范圍壓縮模式。 是否存在關閉兩種模式的配置? 提前致謝, 克里斯蒂安#sta369bw#clipping-mode
2019-08-02 14:10:23
伺服驅動器和伺服電機的接線方法是什么?伺服驅動器如何進行參數配置?如何通過PLC控制伺服電機的正反轉及定長控制?
2021-09-29 08:38:16
現今,工業控制設備主要分為兩種:工業控制機和可編程控制器(PLC)。工業控制機是由通用的微機推廣應用而發展起來的。目前,可編程控制器正朝著兩個方向發展。一是朝著小型、簡易、價格低廉的方向發展,主要用于單機控制和規模比較小的自動化生產線控制。二是朝著大型、高速、多功能和多層分布式全自動化方向發展。
2019-08-13 08:02:21
模式多用于DC/AC逆變電源,或DC/DC電壓變換;后兩種工作模式多用于開關穩壓電源。另外,開關電源輸出電壓也有三種工作方式:直接輸出電壓方式、平均值輸出電壓方式、幅值輸出電壓方式。同樣,前一種
2018-10-15 13:37:16
怎樣去制作一款基于STM32F103的無刷電機(BLDC)控制器?基于STM32F103的無刷電機(BLDC)控制器支持那兩種模式?
2021-07-20 06:00:04
怎樣去設計三軸伺服控制器?如何對三軸伺服控制器的性能進行測試?
2021-04-28 06:04:11
按鍵掃描的兩種模式:支持連續按就是:一直按著也算有效例如:按鍵檢測時間為1ms按了1s的話等同于按了十次不支持連續按就是:一直按著也只算按了一次也即是上一次按鍵是松開的這一次按下才有效例如
2022-01-06 08:00:20
我們常用到的有哪幾種模式的接口?日常我們用到的JTAG和SWD兩種模式的接口是怎樣的?
2022-02-23 07:14:11
晶體具有兩種諧振模式:串聯(兩個頻率中的低頻率)和并聯(反諧振,兩個頻率中的高頻率)。所有在振蕩電路中呈現純阻性時的晶體都表現出兩種諧振模式。在串聯諧振模式中,動態電容的容抗Cm、感抗Lm相等且極性
2019-05-29 08:10:57
筆記本電腦(Notebook)當作主控,撰寫人機接口主控程序,以射頻(RF)無線模塊進行溝通,主控計算機可下達指令給機器人并接收機器人的狀態回傳數據。本文設計的主題是將此機器人群控系統應用于兩種機器人隊形變換,分別是橫縱隊形變換跟四角位置隊形變換。
2019-06-27 07:02:14
本文針對雙極化天線小型化、高隔離度、設計簡單的需求,提出一種應用于無線局域網(WLAN)的雙極化槽天線,饋線采用共面波導結構,利用其兩種正交的模式激勵天線單元水平和垂直兩種極化。
2021-05-24 06:34:29
求一個基于BP神經網絡PID控制器應用于雙閉環直流調速系統BP_PID控制器學習參數怎么設置?
2021-10-13 08:10:12
本文實現了兩種供電方式的設計,并使其應用于多功能手持測試終端,有效降低產品的成本,并且為設備維護帶來了方便。
2021-04-15 06:48:32
控制器有兩種喚醒方式,一個是硬線喚醒,通過IGN線實現對控制器的上電;另一種是通過接收CAN信號來實現對控制器上電。請問這兩種方式的優劣?不勝感激。。。
2018-10-11 14:51:19
控制器有兩種喚醒方式,一個是硬線喚醒,通過IGN線實現對控制器的上電;另一種是通過接收CAN信號來實現對控制器上電。請問這兩種方式的優劣?不勝感激!
2018-10-11 14:43:32
隨著電液伺服控制理論的發展, 很多先進的控制策略被應用于電液伺服控制領域中。
2019-09-24 08:21:27
單片機最小系統,即單片機能正常工作的最簡單的電路。復位電路是單片機最小系統的組成部分之一。對于不同單片機,復位方式有高電平復位和低電平復位,從而相對應地就有兩種復位電路,高電平和低電平復位電路,本文以上電復位為例,簡單談談這兩種復位電路的工作原理。高電平上電復位電路...
2022-01-17 08:52:21
指令;在程序運行的過程中,可以在兩種狀態之間進行相應的轉換。處理器工作狀態的轉變并不影響處理器的工作模式和相應寄存器中的內容。CPU上電處于ARM狀態三、ARM體系的CPU有以下7種工作模式:1、用戶
2020-08-20 12:30:00
西門子1PH7電機有伺服和矢量兩種電機,請問如何分別?謝謝!
2023-12-12 06:19:02
設備振弦采集儀NLM5xx有實時接收和超時休眠兩種工作模式,兩種工作模式如何切換呢?
2022-05-17 13:21:10
關于ad9613的數據手冊是不是有問題?為什么沒有詳細介紹ad9613的兩種輸出模式是怎么設置的?看起來也不像是通過硬件上的端口設置的啊?
2018-09-14 14:34:11
基于FPGA的MCU設計有兩種基本實現方式如何實現微控制器與FPGA的接口設計
2021-05-06 10:05:17
定時器控制器的工作模式有哪些?
2020-12-24 07:20:43
伺服電機的主要應用領域是什么?什么是伺服電機的速度控制模式?什么是伺服電機的位置控制模式?
2021-06-28 09:06:45
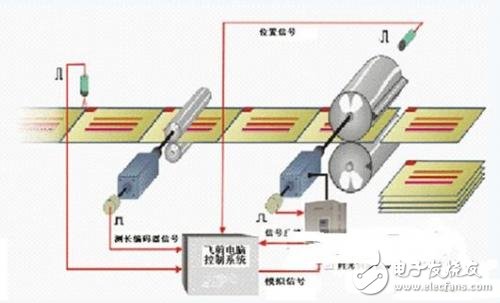
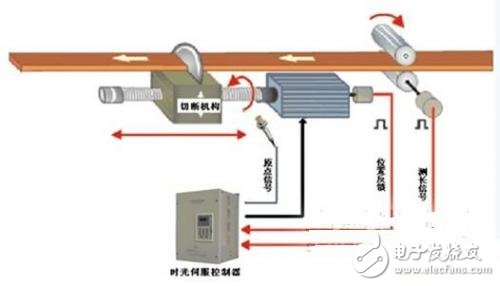
系統功能超聲波滾刀機是一種應用于高速定長切割的設備, 該設備使用伺服系統電機進行送料(也可使用變頻電機送料加編碼器反饋的方式),使用滾刀加超聲波的擠壓來將材料切斷.控制系統特點1、系統雙伺服控制電機
2021-09-09 09:02:26
運動控制器控制伺服電機的指令方式運動控制器以模擬量信號控制伺服電機的調試步驟
2021-01-21 07:15:51
和靈活性,可實時完成運動控制過程中復雜的邏輯處理和控制算法,能實現多軸高速高精度的伺服控制。本文選用DSP與FPGA作為運動控制器的核心部件,設計了通用型運動控制器。其中DSP用于運動軌跡規劃、速度控制
2019-07-31 08:15:26
伺服驅動器(servo drives)又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。
2017-06-08 09:13:0051291 本文主要詳解PLC控制伺服系統步驟,首先介紹了PLC工作原理以及PLC控制伺服電機3種方式,其次闡述了西門子PLC控制的伺服控制系統,具體的跟隨小編一起來了解一下。
2018-06-01 10:46:1250851 伺服的結構是怎樣的?一個最簡易的伺服控制單元,就是一個伺服電機加伺服控制器,今天就來解析下伺服電機與伺服控制器。
2018-07-04 10:52:4242703 這種方式與步進電機的控制方式類似,運動控制器給伺服驅動器發送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號;伺服驅動器工作在位置控制模式,位置閉環由伺服驅動器完成。日系伺服和國產伺服產品大都采用這種模式。其優點是系統調試簡單,不易產生干擾,但缺點是伺服系統響應稍慢。
2019-02-17 11:16:2710987 技術需知伺服電機調試的基本步驟, 運動控制器控制伺服電機通常采用兩種指令方式: 1、數字脈沖 這種方式與步進電機的控制方式類似,運動控制器給伺服驅動器發送脈沖/方向或CW/CCW類型的脈沖指令信號
2020-06-12 14:45:485452 伺服電機的控制模式:1、位置模式,2、速度模式。
2019-10-07 16:48:0014851 伺服的結構是怎樣的?一個最簡易的伺服控制單元,就是一個伺服電機加伺服控制器,今天就來解析下伺服電機與伺服控制器。
2020-09-24 10:54:3412382 
伺服驅動器又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。一般是通過位置、速度和力矩三種
2023-03-07 09:52:4025147 伺服控制器是一種用于控制電機運動的高精度電子設備,主要作用是精確控制電機的位置、速度和加速度等運動參數,從而實現各種運動控制任務。伺服控制器通常使用閉環控制方式,即通過電機編碼器或位置傳感器的反饋信號與期望的控制信號進行比較,從而調整輸出信號以控制電機。
2023-03-09 09:52:061953 伺服控制器的工作原理是通過反饋控制實現對電機運動的精確控制。伺服控制器通常使用閉環控制方式,即將編碼器或位置傳感器的反饋信號與期望的控制信號進行比較,從而調整輸出信號以控制電機。
2023-03-09 09:54:471165 伺服控制器(Servo Controller)是一種電子設備,用于控制伺服電機的運動和位置。伺服電機是一種精密的電機,具有高精度、高速度和高力矩等特點,廣泛應用于各種需要精準控制的自動化設備和機器人
2023-03-12 11:12:193787 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的伺服控制,其實就是對伺服電機的位置控制。 其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-04-27 17:34:351116 
控制器控制伺服電機通常采用兩種指令方式:數字脈沖和模擬信號。數字脈沖這種方式與步進電機的控制方式類似,運動控制器給伺服驅動器發送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號;伺服驅動器工作在位
2023-05-09 14:43:031011 目前伺服控制器的設計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環境比較惡劣的條件如高溫高壓下DSP的應用效果會大打折扣,因此以FPGA為控制核心,對應用于機載三軸伺服控制平臺的控制器進行了設計與優化。
2023-09-04 16:53:01331 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-08-09 09:25:28602 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-09-08 11:22:48737 什么是定長控制功能?變頻器要如何設置定長控制模式?變頻器定長模式的控制設置是如何工作的? 定長控制功能是變頻器控制系統中的一種模式,其主要作用是控制控制中所需軸的行程長度,從而實現工作流程中精確
2023-10-22 14:38:20924 定長控制功能是變頻器控制系統中的一種模式,其主要作用是控制控制中所需軸的行程長度,從而實現工作流程中精確的工作時間和產量控制。定長控制功能應用廣泛,常見于紡織、塑料、包裝等制造行業中的自動生產
2023-10-26 12:00:08554 
伺服電機是一種專門設計用于精確控制位置、速度和加速度的電動機。它通常與伺服驅動器(也稱為伺服放大器或伺服控制器)一起使用,形成一個閉環控制系統。這種系統能夠提供高精度的運動控制,并且廣泛應用于機器人
2024-02-16 10:55:00482
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論