步進電機一般分為永磁式(PM)、反應式(VR)和混合式(HB)三種類型。目前,二相混合式步進電機的應用最為廣泛。
2012-01-26 14:23:00 2921
2921 
步進電機基礎(2.4)- HB型步進電機的轉子齒數與主極數之間的關系前言基本信息公式前言說明HB型步進電機的轉子齒數與主極數之間的關系1. HB步進電機的相數、轉子齒數、主極數之間的表達式2. 相內
2021-07-07 07:25:50
),而像70BYG、90BYG、130BYG等均為國內標準。3、步進電機的靜態指標術語相數:產生不同對極N、S磁場的激磁線圈對數。常用m表示。拍數:完成一個磁場周期性變化所需脈沖數或導電狀態用n表示
2015-12-28 23:16:46
哪幾種?步進電機分三種:永磁式(PM) ,反應式(VR)和混合式(HB)永磁式步進一般為兩相,轉矩和體積較小,步進角一般為7.5度 或15度;反應式步進一般為三相,可實現大轉矩輸出,步進角一般為1.5
2014-01-21 14:55:59
,若原步進電機轉一圈為M步,細分后轉一圈為M*N步。通常市售的 三相感應式步進電機基本步距角 3度,每圈為 120整步或240半步。 三相混合式步進電機基本步距角 1.2度,每圈為 150整步或
2015-12-28 22:19:35
A-AB-B-BC-C-CD-D-DA-A. 步距角:對應一個脈沖信號,電機轉子轉過的角位移用θ表示。θ=360度(轉子齒數J*運行拍數),以常規二、四相,轉子齒為50齒電機為例。四拍運行時步距角為θ=360度/(50*4
2023-03-01 10:41:08
的激磁電流時,轉子就旋轉一個固定角度即步距角。步距角一般由切換的相電流產生的旋轉力矩得到,所以需要每相極數是偶數。步進電機通常都為兩相以上的,當然也有一些特殊的只有一...
2021-07-06 06:00:20
混合式步進電機(常見的1.8度、0.72度的)轉子不能拿出來,否則會退磁的。除非你有充磁機重新充磁。從前聽過一種說法,修理機械表頭時,磁鐵拿出來后要用軟鐵短路NS極,這樣不會失磁,但是步進電機這樣操作
2020-08-25 14:38:12
A-AB-B-BC-C-CD-D-DA-A.2 相數:一般買的時候都會告訴你是幾相的3、步距角:對應一個脈沖信號,電機轉子轉過的角位移用θ表示。θ=360度(轉子齒數J*運行拍數),以常規二、四相,轉子齒為50齒電機為例。四拍運行時步距角為θ=360度/(50*4)=1.8度(俗稱整步),八拍運行時步距角為θ=3.
2021-08-31 07:47:51
Part 1:名詞概念轉子齒數Z:轉子圓周上均勻分布的小齒個數;定子相數M:步進電機線圈(繞組)個數,以產生不同對極N、S磁場;通電方式C:①C=1 :單相輪流通電、雙相輪流通電;②C=2 :單
2021-07-07 07:01:09
類型。混合式步進電機將前兩類步進電機的優點綜合于一身。混合式步進電機根據線圈極數可分為 兩相、三相、五相步進電機。兩相混合式步進電機目前應用最為廣泛。常見的兩相混合式步進電機的定子...
2021-07-08 09:34:00
步進電機的相數:是指電機內部的線圈組數,目前常用的有二相、三相、四相、五相步進電機。電機相數不同,其步距角也不同,一般二相電機的步距角為0.9°/1.8°、三相的為0.75°/1.5°、五相的為
2021-08-31 07:17:50
相數:產生不同對極N、S磁場的激磁線圈對數。常用m表示。拍數:完成一個磁場周期性變化所需脈沖數或導電狀態用n表示,或指電機轉過一個齒距角所需脈沖數,以四相電機為例,有四相四拍運行方式即
2021-07-07 06:38:47
步進電機的相數是指什么意思?步進電機的拍數是指什么意思?
2021-10-28 06:45:13
應用技術作者坂本正文譯者王自強公式θs = 180° /P*Nr ?????????????? 公式(2. 1) 步進電機的步距角θs,其中Nr 為轉子極對數,P為定子相數前言說明根據我讀的《步進電機應用技術》這本書,進行的學習過程中的知識記錄和心得體會的記錄
2021-07-07 06:34:16
、90BYG、130BYG等均為國內標準。3、步進電機的靜態指標術語相數:產生不同對極N、S磁場的激磁線圈對數。常用m表示。拍數:完成一個磁場周期性變化所需脈沖數或導電狀態用n表示,或指電機轉過一個齒
2018-10-12 11:07:38
, BYG是指混合式步進電機(混合式步進電機是綜合了永磁式和反應式的優點而設計的步進電機。它又分為兩相、三相和五相,兩相步進角一般為1.8度 ,三相步進角 一 般為 1.2度 ,而五相步進角 一
2021-07-07 06:05:42
淺析步進電機的拍數與相數
2021-03-17 07:19:40
包括反應式步進電機(VR)、永磁式步進電機(PM)、混合式步進電機(HB)和單相式步進電機等。 永磁式步進電機一般為兩相,轉矩和體積較小,步進角一般為7.5度 或15度; 反應式步進電機一般為
2014-01-11 14:49:42
大,力矩大,動態性能好;3、混合式步進電機(HB):結合VR、PM電機優點,輸出力矩大、步距角小、動態性能好,目前使用最為廣泛,下述以該類電機為例進行介紹。二、兩相混合式步進電機結構1、實物圖如下所示,主要由定子、轉子、端蓋組成2、結構示意圖如下所示3、剖視圖分析(剖切轉子S端)定子
2021-07-07 08:09:56
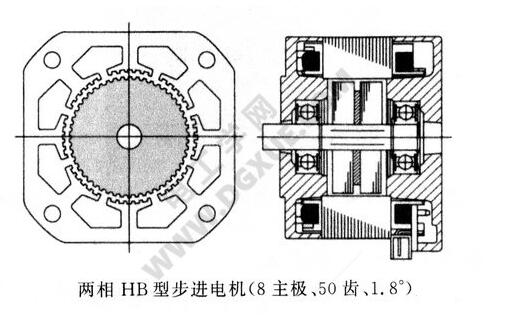
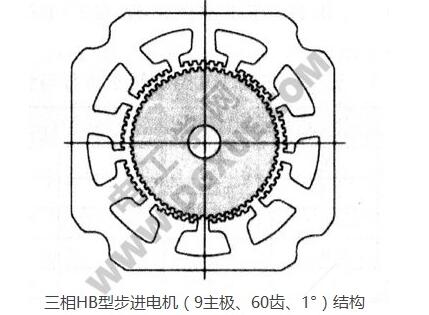
、57、86、110等3、步進電動機構造:由轉子(轉子鐵芯、永磁體、轉軸、滾珠軸承),定子(繞組、定子鐵芯),前后端蓋等組成。最典型兩相混合式步進電機的定子有8個大齒,40個小齒,轉子有50個小齒;三相電機的定子有9個大齒,45個小齒,轉子有50個小齒。4、步進電動機主要參數步進電機的相數:是指電機
2021-06-28 13:06:37
步進電機兩相步進電機 兩相步進電機一共有兩個線圈,A線圈,B線圈,如圖1 圖1 步距角的計算方法:轉子齒數(轉子極對數)Nr,定子相數P Θ=180/Nr*P。 圖1:Θ=180/1*2=90。 控制線圈的通斷,即可以控制線圈的轉動,轉動的時序為 輸入123456789 +A110011...
2021-06-30 07:06:07
首先步距角的概念,θ=360度/(轉子齒數*運行拍數)常規的兩相步進電機步距角1.8°,三相1.2°,四相0.9°;一個步距角對應一個脈沖,也就是說接收到一個脈沖,旋轉一個步距角。以57步進電機
2021-07-08 08:54:11
。步進電動機的種類 根據勵磁式方式的不同分為:反應式、永磁式和混合式(又叫感應子式)三種。反應式步進電機的應用較多。下面以反應式步進電機為例
2008-11-19 23:54:15
混合式步進電機的驅動原理是什么?混合式步進電機的結構是由哪些部分組成的?混合式步進電機如何去實現輸出控制呢?
2021-12-21 06:29:50
混合式步進電機的結構和驅動原理是什么?如何產生Spwm?
2021-12-21 07:20:31
一、步進電機模型1.步進電機分類 廣義上可將步進電機分為機械式、電磁式、組合式。按結構特點電磁式步進電機可分為:反應式(VR)、永磁式(PM)、混合式(HB)按相數可分為:單相、兩相、多相 2.步進
2021-07-08 07:23:34
電機的極數和轉速有什么關系 如何退出運行的無銘牌電動機的極數
2021-02-25 07:33:22
單片機步進電機控制器是什么?怎樣去制作一種單片機電動機控制器?D306型號三相伺服混合式步進電機驅動器具有哪些特點?怎樣去使用D306三相混合式步進電機驅動器?
2021-07-13 08:09:56
本帖最后由 houshannanhai 于 2017-4-10 10:44 編輯
請教一下,我基于步進電機做了一個Labview的控制程序,可以一邊控制步進電機,一邊顯示電機走過的步數,但是
2017-04-10 10:12:59
、步進電機按轉子的結構分三種:永磁式(PM),反應式(VR)和混合式(HB)。圖1永磁式永磁式步進電機一般為兩相,轉矩和體積較小,步進角一般為7.5度或15度;價格便宜,精度差。圖2 反應反應式步進
2022-05-26 13:58:40
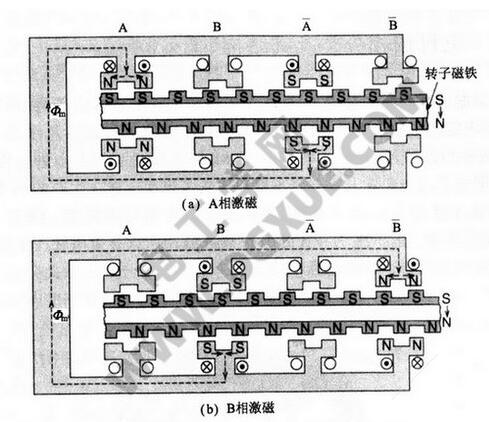
要求旋轉。因為混合式步進電機轉子的永磁磁場也產生一部分的轉矩,所以比反應式步進電機僅由定子磁場產生的轉矩要大。 圖二:二相混合式步進電機定轉子結構圖步進電機有如下的特點:(1)步距角穩定,只與電機結構等
2021-09-10 08:45:23
樣,得認清女人的類別,挑一類自己好口的進行針對性的進攻這樣方可告捷啊。于是就百度啊google啊,得到以下結論:步進電機分三種:永磁式(PM)、反應式(VR)和混合式(HB)。永磁式步進一般為兩相,轉矩
2019-07-27 04:30:00
與特性根據我讀的《步進電機應用技術》這本書,進行的學習過程中的知識記錄和心得體會的記錄。定子相數的分類、結構、原理當步進電機切換一次定子繞組的激磁電流時,...
2021-06-30 07:09:42
如何選擇電機的種類?不同相數的步進電機的優缺點是什么?
2021-10-12 08:47:18
1. 仿真圖2. 驅動電路原理解析2.1 兩相四線混合式步進電機驅動原理首先給出兩相四線混合式步進電機的整步驅動順序圖。可以看出,兩相驅動電壓的相位差為90°,因此,第一節中驅動電路的兩個脈沖電壓源
2021-07-08 07:24:12
兩相混合式步進電機H橋驅動電路設計原理
2021-02-19 06:00:06
兩相混合式步進電機及其驅動技術
2013-04-11 13:54:40
兩相混合式步進電機細分用32輸出可調的PWM波形 不用DA可以實現細分嗎
2015-08-20 13:45:39
新手求助,基于PIC的兩相混合式步進電機閉環細分驅動器設計!求大神指導!
2013-04-11 13:22:48
誰有PL2303的驅動適合win8的 謝謝啦 還有我用L298驅動二相混合式步進電機怎動不了求一個不帶按鍵的C程序 謝謝大神
2015-12-31 12:08:24
二相混合式步進電機simulink仿真模型怎么搭建?
2021-10-28 07:53:18
細分原理二相混合式步進電機電磁轉矩方程?p-轉子級數;Zr-轉子齒數Zr=2*p;Ta-a相電磁轉矩;Tb-b相電磁轉矩;Td-定位矩(關于二相混合式步進電機的數學模型可參見我的另一篇博客https
2020-06-14 22:33:19
細分原理二相混合式步進電機電磁轉矩方程p-轉子級數;Zr-轉子齒數Zr=2*p;Ta-a相電磁轉矩;Tb-b相電磁轉矩;Td-定位矩(關于二相混合式步進電機的數學模型可參見我的另一篇博客https
2021-07-08 09:59:07
在位置跟蹤伺服系統中二相混合式步進電機閉環矢量控制simulink仿真閉環矢量控制系統simulink圖?閉環矢量控制系統系統結構框圖?二相混合式步進電機的數學模型矩角特性?其中 Nr-轉子齒數
2020-06-14 22:35:18
上圖中的Te仿真中有兩個小錯誤,正確方程應為:模型文件名為:model_of_Two_phase_Hybrid_stepping_motor.slx(2019b)參考文獻:基于MATLAB/Simulink的二相混合式步進電機的建模與仿真
2021-08-31 06:13:04
``什么是電機的極數三相異步電動機“極數”是指定子磁場磁極的個數。定子繞組的連接方式不同,可形成定子磁場的不同極數。選擇電動機的極數是由負荷需要的轉速來確定的,電動機的極數直接影響電動機的轉速
2017-08-19 22:20:03
“電子齒數”是對來自上位裝置輸入指令的1個脈沖對應于工件所走的移動量進行任意設定的功能。 設編碼器為17位編碼器,則其分辨率為131072,那么伺服旋轉一周編碼器反饋回來131072個脈沖
2021-09-07 08:44:13
下圖為兩相四線混合式步進電機用雙H橋驅動電路。圖中Ra、La、Rb、Lb分別為兩相四線混合式步進電機的兩相電阻及電感參數。
2021-07-07 07:15:42
步進電機的相數是指電機內部的線圈組數,如4相就是有ABCD四組線圈。拍數是指完成一個循環的通電次數。例如按照ABCD順序完成一個循環,就稱為單4拍。相鄰的兩個線圈也可以同時通電,例如可以按照
2021-07-08 08:20:07
(PM) ,反應式(VR)和混合式(HB)永磁式步進一般為兩相,轉矩和體積較小,步進角一般為7.5度 或15度;反應式步進一般為三相,可實現大轉矩輸出,步進角一般為1.5度,但噪聲和振動都很大。在歐美等
2018-08-28 15:36:30
分析了電腦繡花機系統中,現有的五相混合式步進電機驅動器存在低頻轉矩振蕩、高頻輸出轉矩不足和多電源供電及不通用等諸多不足之處的基礎上,設計出一種基于單片機的通用型五相混合式步進電機驅動器.該驅動器
2011-03-07 12:15:26
如何使用uln2003驅動39BYG混合式1.8°步進角的步進電機?
2021-10-28 07:24:24
設置一段一相,幾乎取消的多相電機互繞的端部。對于n段電機,各段的轉子或者定子錯開其極距角的1/n,可將極距進一步進行n倍細分。 2.3 混合式步進電機 單純的變磁阻電機,旋轉的方向取決于脈沖電流
2023-03-03 15:44:49
1.步進電機的基本知識(1)拍數——每一次循環所包含的通電狀態數(電機轉過一個齒距角所需脈沖數)(2)單拍制分配方式——狀態數=相數(3)雙拍制分配方式——狀態數=相數的兩倍(4)步距角 ——步進機
2021-07-08 09:33:28
時的振動和噪聲?四相混合式步進電機與驅動器的串聯接法和并聯接法有什么區別?混合式步進電機驅動器的脫機信號FREE一般在什么情況下使用?
2021-10-13 09:04:55
三相混合式步進電機驅動器B3C的工作原理根據正弦電流細分驅動的原理,設計出三相混合式細分型步進電機驅動器,系統采用電流跟蹤和脈寬調制技術,使電機的相電流為相位相
2008-12-19 01:36:33 136
136 本文介紹了森創-兩相混合式步進電機的組成部分及優點。
2009-04-02 13:59:38100 本文針對電流控制的兩相混合式步進電機給出了一種驅動方案。
2009-04-02 15:24:0740 DY3A/DY3B 混合式步進電機使用手冊
2010-01-09 10:19:1820 二相混合式步進電機驅動器的優化設計:從 改善步進電機動靜態性能的角度出發,給出了基于8051的二相混合式步進電機驅動器的優化設計方案,主要介紹了系統結構、通訊策略、
2010-01-14 09:44:21100 三相混合式多細分步進電機驅動器
本文根據正弦電流細分驅動的原理,設計出三相混合式多細分步進電機驅動器。系統采用電流跟跟蹤和脈寬調制技術,使用電機的相
2010-02-22 10:58:092135 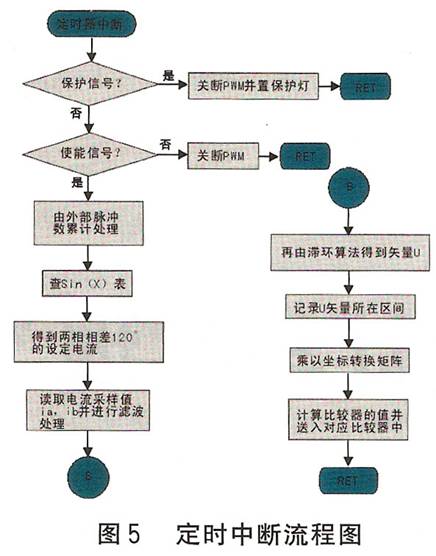
在分析了步進電機的驅動特性和斬波恒流細分驅動原理和混合式步進電機驅動芯片L297/298的性能、結構的基礎上,結合8751單片機,設計出了混合式步進電機驅動器.實測表明,此細分
2011-09-27 16:25:0674 三相混合式步進電機比二相步進電機有更好的低速平穩性及輸出力矩,所以三相混合式步進電機比二相步進電機有更好應用前景。
2012-02-29 10:50:402835 
基于DSP的三相混合式步進電機的SVPWM控制。
2016-04-18 09:47:4914 多細分二相混合式步進電機驅動器的研制,下來看看
2016-04-25 10:40:3618 多細分三相混合式步進電機驅動器研究及實現
2016-04-25 10:40:3645 二相混合式步進電機驅動器的優化設計,下來看看
2016-04-25 10:40:3622 混合式步進驅動單元的研究,有需要 的下來看看
2016-04-25 10:40:3616 基于DSP的兩相混合式步進電機細分驅動設計
2016-04-25 10:54:0917 一、型號說明 混合式步進電機采用稀土永磁 材料制造 與反應式步進電機相比具有電磁損耗小 轉換效率高 動態特性好等優點 混合步進電機的電磁靜力矩為電機阻尼 ,取消了反應式電機的機械阻尼盤 無需人工調整 運行平穩 噪音小不易失步 混合式步進電機取代反應式電機是經濟型數控系統的發展趨勢。
2017-11-13 12:46:4116 混合式(即HB型)步進電機有兩相、三相、五相式,轉子因與相數無關,而采用相同轉子,本文以兩相HB型混合式步進電機為例加以說明。HB型的名稱由其轉子結構得來,其轉子是PM型永磁步進電機與VR型變磁阻
2018-04-25 10:04:0519117 轉動一個固定的角度(即步進角)。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的。那么什么是混合式步進電機,混合式步進電機和反應式步進電機有什么區別嗎?接下來跟隨小編詳細的來了解一下混合式步進電機。
2018-04-25 10:59:1115748 低1/2。 ②跟混合式(HB)型步進電機比較,氣隙大,爪級構造,步距角度大,即同一轉速情況下,想切換的次數小、噪音較低。 ⑵缺點: ①因分辨率低(步距角7.5比較大)的關系,位置定位誤差比混合式(HB)型步進電機要差,特別是1相激磁時的角度精度會更
2020-05-31 09:26:423358 次之,在運行特性上有區別,混合式電機運轉時相對性較穩定,輸出力矩相對性比較大,運轉聲音小。
2020-08-08 09:14:001429 步進電機從其結構形式上可分為反應式步進電機、永磁式步進電機、混合式步進電機、單相步進電機、平面步進電機等多種類型。
2020-12-26 08:30:353527 H橋功率驅動電路可應用于步進電機、交流電機及直流電機等的驅動。永磁步進電機或混合式步進電機的勵磁繞組都必須用雙極性電源供電,也就是說繞組有時需正向電流,有時需反向電流,這樣繞組電源需用H橋驅動。本文以兩相混合式步進電機驅動器為例來設計H橋驅動電路。
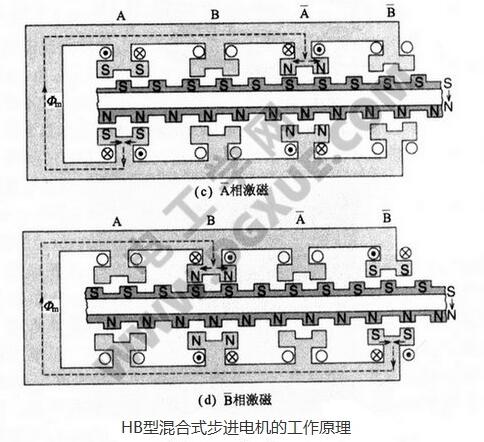
2021-01-31 06:21:3529 此前已經以PM型步進電機為例介紹了步進電機的工作。本文將介紹當今應用廣泛的混合式步進電機的結構和工作原理。
2021-06-12 10:48:006608 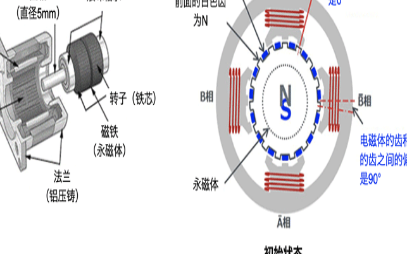
此前已經以PM型步進電機為例介紹了步進電機的工作。本文將介紹當今應用廣泛的混合式步進電機的結構和工作原理。混合式步進電機的結構,混合式步進電機是兼具VR型和PM型電機優點的步進電機。
2023-02-24 09:51:101220 
兩相混合式步進電機的物理結構通常情況下一般主要分為定子和轉子。其軸向結構如圖 2-4所示。定子結構的部分有鐵芯和繞組等有關組成而轉子結構的部分有鐵芯和轉軸。通過磁體產生的磁場,將兩段鐵芯磁化成兩極性,都各有50個小齒,而且在設計時錯開了1/2齒。
2023-03-01 10:09:021780 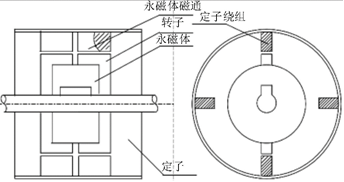
混合式步進電機(Hybrid Stepper Motor)是目前應用較廣泛的一種步進電機,其工作原理是將永磁式和可變磁阻式兩種原理結合在一起。
混合式步進電機的轉子由多個磁極組成,通常
2023-03-08 16:10:341801 混合式步進電機是兼具VR型和PM型電機優點的步進電機。VR(Variable Reluctance)型電機使用齒輪狀的鐵芯作為轉子。其優點是可以通過機械加工減小步距角,缺點是轉矩稍低,難以同時實現
2023-03-10 09:12:36545 
低、發熱大,可靠
性難以保證。
永磁式
永磁式步進電機的轉子用永磁材料制成,轉子的極數與定子的極數相同。其特點是動態性能好、輸出力矩大,但這種電機度
差,步距角大(一般為7.5度或15度)。
混合式
混合式步進電機綜合了反應式和永磁式的
2023-03-21 13:58:091 兩相混合式步進電機數學模型 式中 Ls為自感,它與轉子的機械角位置 θ 有關。 由于混合式步進電機中磁芯造成很大的氣隙, 其可變磁阻對于輸出總力矩的貢獻可以忽略,式 (2)作為單相繞組等效電路
2023-03-22 09:52:400 和性能。本節將介紹其一般的關系式。
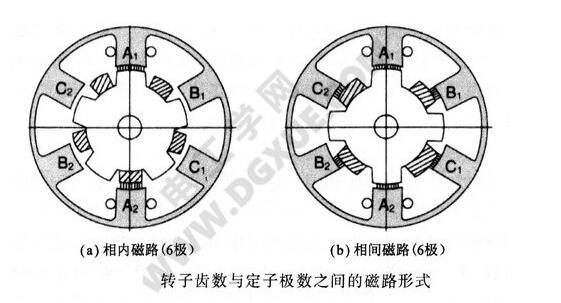
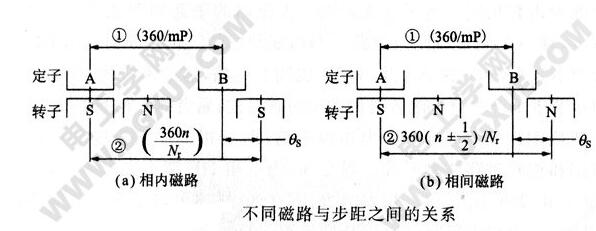
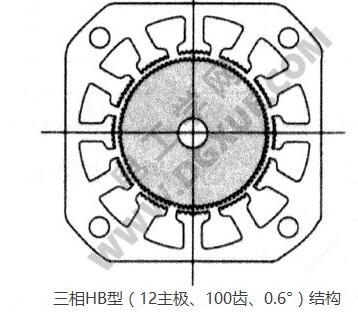
如 HB型步進電機為P相,轉子齒數Nr , 則依據式(2. 1) 可知其步距角0, 為 θs=180°/PNr 此時,定子1相主極數(AA相的總和)為m個,均勻配置,其內徑配的多個細齒齒數相同。轉子永久磁鐵產生磁通的磁路
2023-03-23 14:15:300 目錄在位置跟蹤伺服系統中二相混合式步進電機閉環矢量控制simulink仿真 閉環矢量控制系統simulink圖? 閉環矢量控制系統系統結構框圖 二相混合式步進電機的數學模型 矩角特性 電壓方程
2023-03-24 10:30:591 反應式步進電機與混合式步進電機的區別如下:
1、在結構和材料上不同,混合式電機內部具有永久磁性材料,故混合式電機有自阻(即在電機未加電的情況下有一定的自鎖力),而反應式電機沒有自阻。
2、在運行性能上有差別,混合式電機運行時相對較平穩,輸出力矩相對較大,運行聲音小。
2023-03-27 15:42:33745 的品種也非常繁多。對于工業應用來說,每轉 200 步的兩相混合式步進電機最為常見。這里的 “混合” 是指它利用永磁體和帶齒鐵轉子的工作方式(例如可變磁阻電機),而 “200 步” 則指電機每步移動 1.8°,該步數為轉子和定子上齒數的函數
2023-08-23 15:22:55715 
,以實現更高的性能和靈活性。在結構設計上,混合式步進電機采納了VR型電機的齒輪狀鐵芯轉子,這使得它能夠通過機械加工達到較小的步距角,同時結合了PM型電機的強力永磁體,以增強轉矩輸出,實現了小型化與高轉矩的并存。 混合式步進電機的轉子設計獨特,它由兩
2024-02-06 10:01:46236 
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論