 電子發燒友App
電子發燒友App


無刷直流電機的正反轉是什么
無刷直流電機廣泛應用于驅動和伺服系統中,在許多場合,不但要求電機具有良好的起動和調節特性,而且要求電機能夠正反轉,將著重分析無刷直流電機的正反轉原理和實現正反轉的方法。
有刷直流電機的正反轉可以通過改變電源電壓的極性來實現,而無刷直流電機則不能通過改變電源電壓的極性來實現,但無刷直流電機正反轉的原理和有刷直流電機是相同的。
通常采用改變逆變器開關管的邏輯關系,使電樞繞組各相導通順序變化來實現電機的正反轉,為了使電機正反轉均能產生最大平均電磁轉矩以保證對稱運行,必須精確設計轉子位置傳感器與轉子主磁極和定子各相繞組的相互位置關系,以及正確的邏輯關系,下面以兩相導通星形三相六狀態稀土永磁無刷直流電機為例,來分析其正反轉的實現方法,采用霍爾元件轉子位置傳感器來實現永磁無刷直流電機的正反轉調速,三個霍爾元件沿圓周均勻分布粘貼于電機端蓋上,故霍爾元件彼此相差120°電角度。
如何實現無刷直流永磁電動機正反轉
無刷直流永磁電動機實現正反轉方法
無刷直流永磁電動機實現正反轉的方法有兩種:
● 裝置兩套轉子位置傳感器。
● 采用一套轉子位置傳感器,借助邏輯電路改變功率開關晶體管的導通順序,從而實現電動機的正反轉。
可以這么說,由轉子位置傳感器控制的功率開關晶體管導通順序,確定無刷直流永磁電動機電樞磁勢矢量究竟往哪個方向轉,也就決定了電動機的轉向,還真不是電源極性所能確定得了的,加載到無刷直流永磁電動機電樞繞組上的電源極性原本就是不斷交變的。
有刷直流永磁電動機正反轉原理
為便于分析無刷直流永磁電動機正反轉原理,這里先對有刷永磁直流電動機正反轉問題進行討論。
圖1給出了有刷永磁直流電動機正反轉原理。圖1(a)中磁極下電樞電流分布情況下,利用左手定則或比奧·薩乏定律可知,電樞將按順時針方向轉動。如果改變電樞電流方向,使其產生的電樞磁場與圖1(a)中的方向相反,即轉過去180電角度,如圖1(b)所示,則電樞將按逆時針方向轉動。若保持圖1(b)中的電樞電流的方向不變,而把定子磁場旋轉180電角度,如圖1(c)所示,則電樞又將按照順時針方向轉動。
圖1
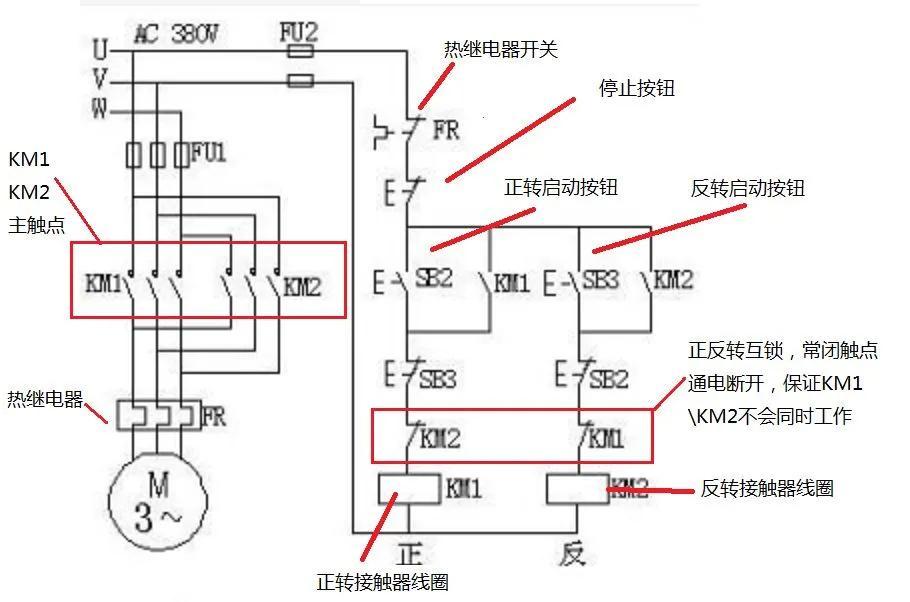
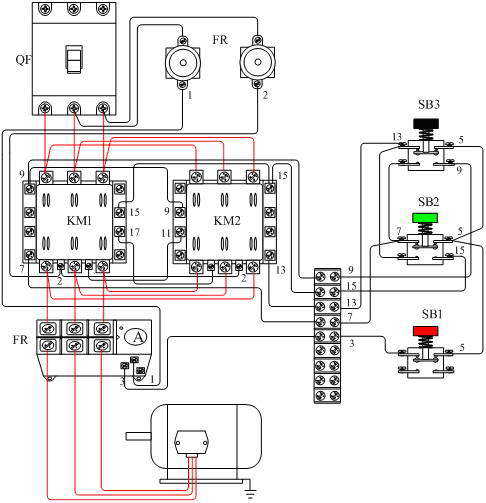
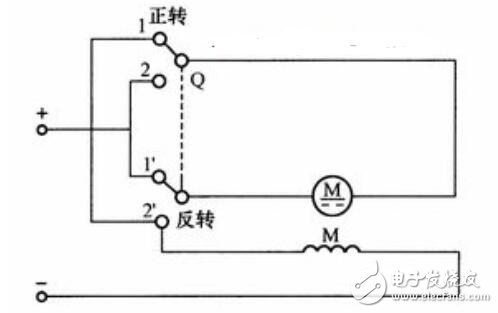
基于以上分析,可以得出結論:對于有刷永磁直流電動機而言,定轉子磁場中,只要有一個磁場且只能有一個磁場,若相對原磁場的方向旋轉180電角度,則電動機就改變其轉動方向。所以,在有刷永磁直流電動機中,改變電源電壓的極性,就可以改變電樞電流的方向,從而改變其轉動方向,實現正反轉,其實際接線如圖2所示。
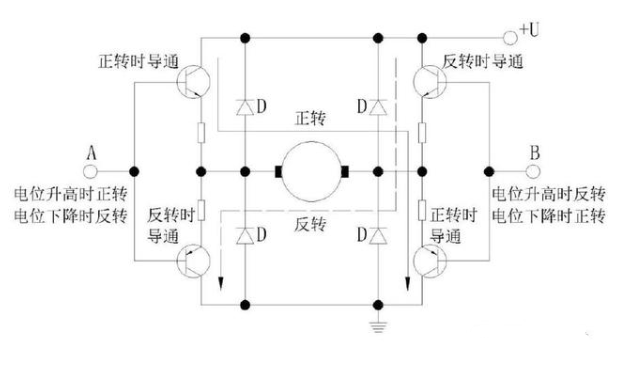
圖 2
無刷直流永磁電動機如何正反轉?
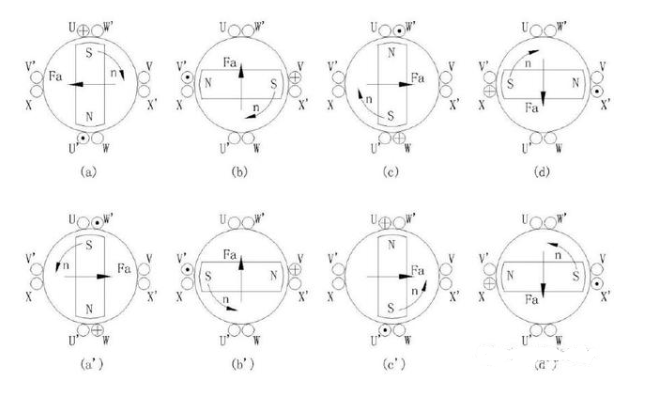
無刷直流永磁電動機的正反轉不能通過改變電源電壓的極性來實現,然而它正反轉的原理與有刷永磁直流電動機相同。圖3表示了在旋轉過程中,一臺四相星形無刷直流永磁電動機定轉子磁場之間的相互關系。每相繞組導通角為90電角度,其相應的驅動信號如圖4所示。
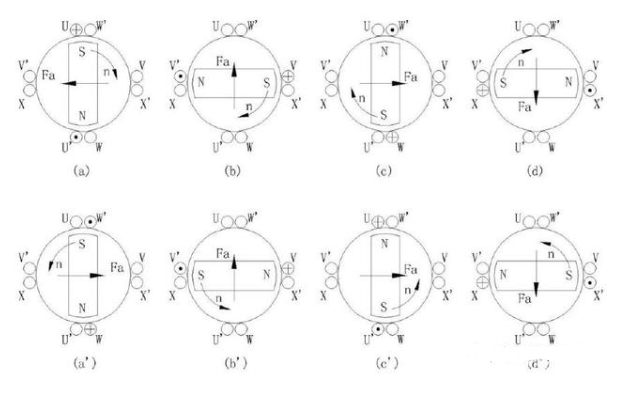
圖 3
在圖3中,我們可以看到:
1) 當t=t1時,U相繞組通電,電流方向和轉子永磁體的位置如圖3(a)中狀態所示,永磁體轉子按順時針方向轉動。如果此時換成W相繞組通電,則定子磁場就相對圖3(a)狀態旋轉過180電角度,如圖3(a’)中狀態所示,永磁體轉子便逆時針方向轉動。
2) 當t=t2時,V相繞組通電,永磁體轉子按順時針方向轉動,如圖3(b)中狀態所示。如果此時換成圖3(a’)逆時針轉至圖3(b’)中狀態,則定子磁場就相對圖3(b)狀態同方向,此時永磁體轉子磁場相差180電角度,轉子繼續按逆時針方向轉動。
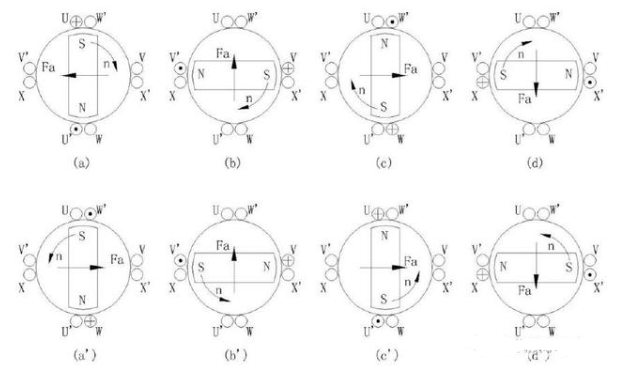
圖 3
3)當t=t3時,W相繞組通電,永磁體轉子按順時針方向轉動,如圖3(c)中狀態所示。如果此時換成圖3(b’)逆時針轉至圖3(c’)中狀態,U相繞組通電,則定子磁場就相對如圖3(c)狀態旋轉過180電角度,如圖3(c’)中狀態所示,轉子便按逆時針方向轉動。
4)當t=t4時,X相繞組通電,永磁體轉子按順時針方向轉動,如圖3(d)中狀態所示。如果此時換成圖3(c’)逆時針轉至圖3(d’)中狀態,則定子磁場就相對圖3(d)狀態同方向,此時永磁體轉子磁場相差180電角度,轉子繼續按逆時針方向轉動。
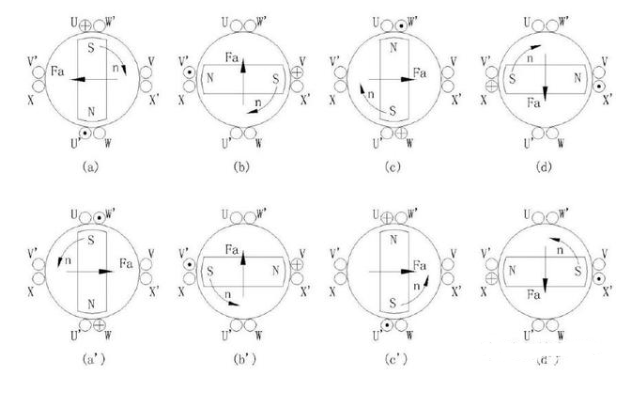
圖 3
由上面的分析可以看到:當無刷直流永磁電動機電樞繞組的通電狀態按(a)-(b)-(c)-(d) -(a)順序連續變化時,永磁體轉子便按順時針方向轉動;如果電樞繞組的通電狀態按(a’)-(b’)-(c’)-(d’) -(a’)順序連續變化時,則永磁體轉子就按逆時針方向轉動。比較狀態(a)和(a’),(b)和(b’),(c)和(c’),(d)和(d’),可以發現它們之間的差別僅在于:要么反轉電動機的定子磁場與正轉電動機的定子磁場之間相差180電角度,要么反轉電動機的永磁體轉子磁場與正轉電動機的永磁體轉子磁場之間相差180電角度。這與有刷直流永磁電動機實現正反轉的原理是一致的。
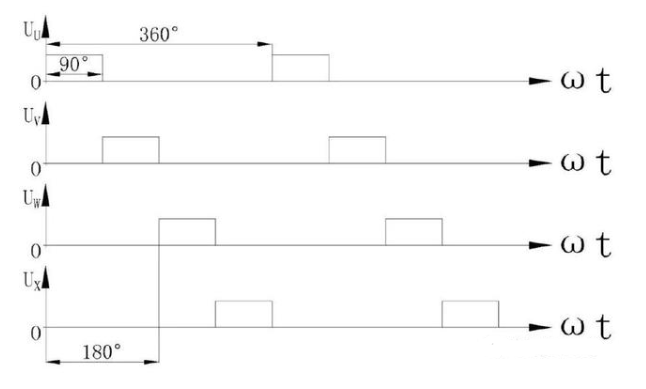
圖 4
無刷直流永磁電機正反轉控制原理圖
如何實現圖3所示狀態無刷直流永磁電動機電樞繞組的通電狀態按(a)-(b)-(c)-(d) -(a)順序連續變化到按(a’)-(b’)-(c’)-(d’) -(a’)順序連續變化轉換呢?電動機電樞繞組的通電是借助驅動信號來控制的,當電動機按順時針方向轉動時,其相繞組U、V、W、X分別與驅動信號UU、UV、UW、UX—一對應,我們需要按下列步驟變更驅動信號的驅動對象,以實現控制無刷永磁同步電動機反轉或逆時針旋轉。
● 初始狀態
在本應是U相繞組通電的轉子位置上,不讓U相繞組通電,而讓W相繞組通電,也就是在此刻把驅動信號Uu去驅動W相繞組,使W相繞組通電,便實現了由狀態(a)到(a’)的切換。
● 轉過90電角度
此時順時針與逆時針旋轉的轉子磁極轉向相反方向,即轉子磁場互差180電角度,定子電樞磁場同方向才能使逆時針旋轉的轉子磁極旋轉的磁極繼續逆時針方向旋轉。故同為UV去驅動V相繞組,使V相繞組通電,實現了由狀態(b)到(b’)的切換。
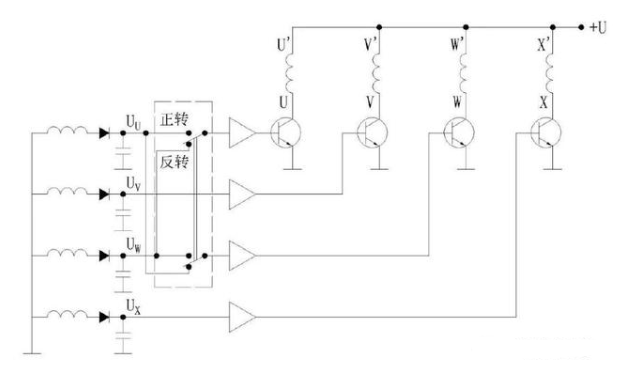
圖 5
● 轉過180電角度
此時順時針與逆時針旋轉的轉子磁極轉向同方向,即轉子磁場同與初始狀態互差180電角度,在本應是W相繞組通電的轉子位置上,不讓W相繞組通電,而讓U相繞組通電,也就是在此刻把驅動信號UW去驅動U相繞組,使U相繞組通電,便實現了由狀態(c)到(c’)的切換。
● 轉過270電角度
此時順時針與逆時針旋轉的轉子磁極又轉向相反方向,即轉子磁場互差180電角度,定子電樞磁場同方向才能使逆時針旋轉的轉子磁極旋轉的磁極繼續逆時針方向旋轉。故同為UX去驅動X相繞組,使X相繞組通電,實現了由狀態(d)到(d’)的切換。

圖 5
● 轉過360電角度
回到初始狀態,重復上述過程。
采用接觸式或無接觸式聯動開關就可以完成(a)-(b)-(c)-(d) -(a)順序連續變化到按(a’)-(b’)-(c’)-(d’) -(a’)順序連續變化切換,從而實現了電動機由順時針方向轉動到逆時針方向轉動的變換。圖5是它的原理圖,圖中方塊1為聯動開關。









 工商網監
工商網監
評論