 電子發燒友App
電子發燒友App


定時計數器T0作定時應用技術(一)
1. 實驗任務
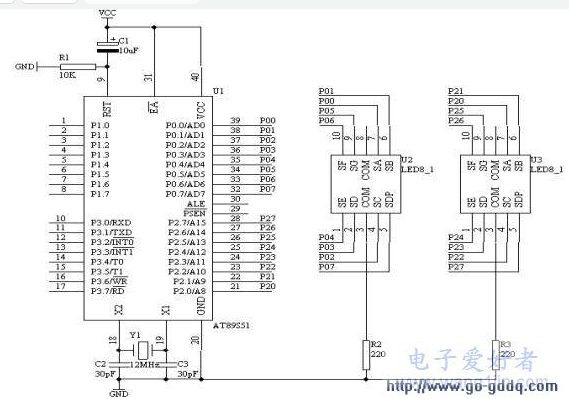
用AT89S51單片機的定時/計數器T0產生一秒的定時時間,作為秒計數時間,當一秒產生時,秒計數加1,秒計數到60時,自動從0開始。硬件電路如下圖所示
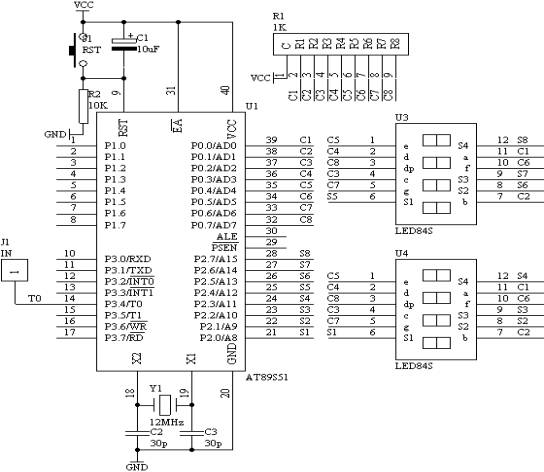
2. 電路原理圖 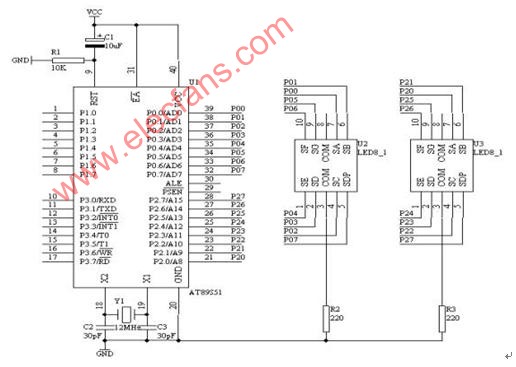
圖4.15.1
3. 系統板上硬件連線
(1. 把“單片機系統”區域中的P0.0/AD0-P0.7/AD7端口用8芯排線連接到“四路靜態數碼顯示模塊”區域中的任一個a-h端口上;要求:P0.0/AD0對應著a,P0.1/AD1對應著b,……,P0.7/AD7對應著h。
(2. 把“單片機系統”區域中的P2.0/A8-P2.7/A15端口用8芯排線連接到“四路靜態數碼顯示模塊”區域中的任一個a-h端口上;要求:P2.0/A8對應著a,P2.1/A9對應著b,……,P2.7/A15對應著h。
4. 程序設計內容
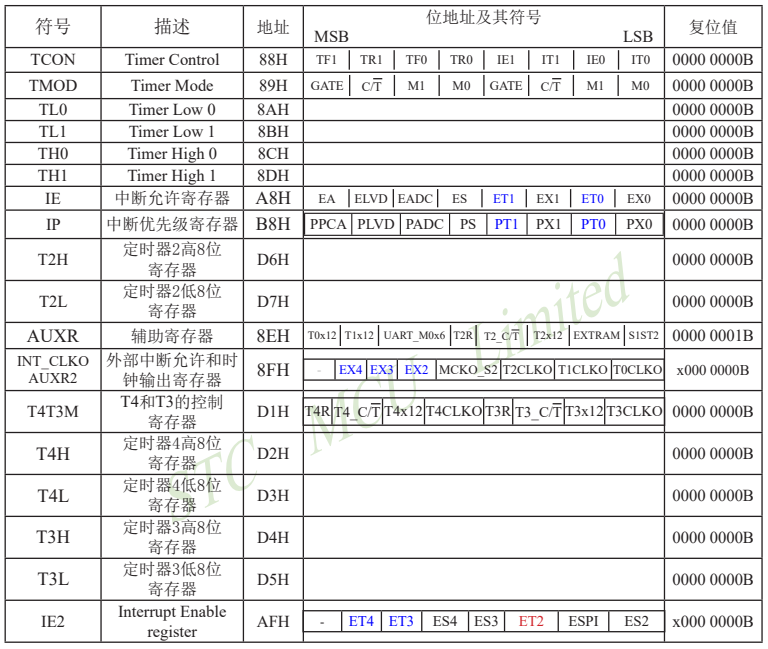
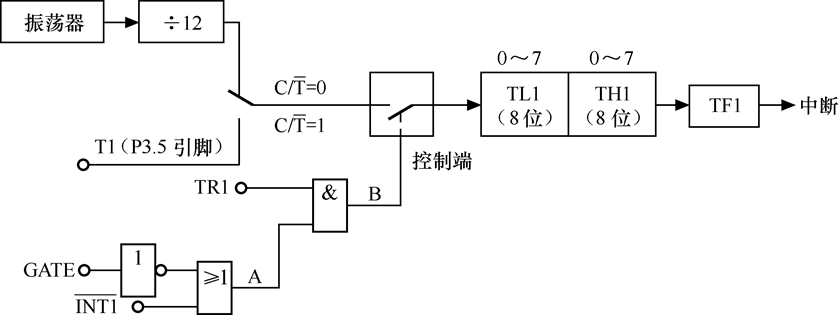
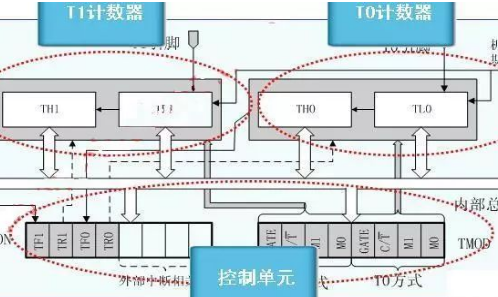
AT89S51單片機的內部16位定時/計數器是一個可編程定時/計數器,它既可以工作在13位定時方式,也可以工作在16位定時方式和8位定時方式。只要通過設置特殊功能寄存器TMOD,即可完成。定時/計數器何時工作也是通過軟件來設定TCON特殊功能寄存器來完成的。
現在我們選擇16位定時工作方式,對于T0來說,最大定時也只有65536us,即65.536ms,無法達到我們所需要的1秒的定時,因此,我們必須通過軟件來處理這個問題,假設我們取T0的最大定時為50ms,即要定時1秒需要經過20次的50ms的定時。對于這20次我們就可以采用軟件的方法來統計了。
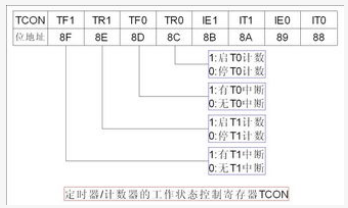
因此,我們設定TMOD=00000001B,即TMOD=01H
下面我們要給T0定時/計數器的TH0,TL0裝入預置初值,通過下面的公式可以計算出
TH0=(216-50000) / 256
TL0=(216-50000) MOD 256
當T0在工作的時候,我們如何得知50ms的定時時間已到,這回我們通過檢測TCON特殊功能寄存器中的TF0標志位,如果TF0=1表示定時時間已到。
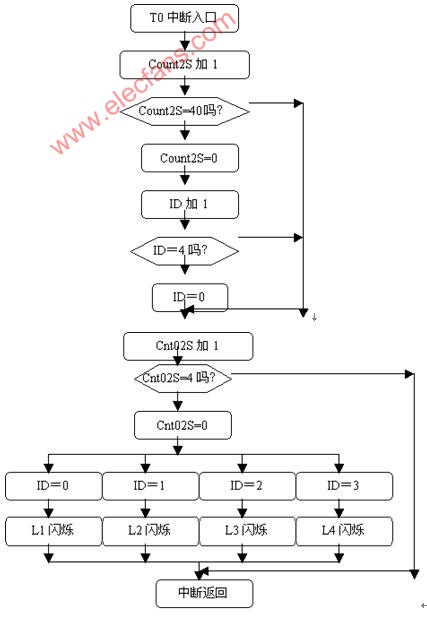
5. 程序框圖 
6. 匯編源程序(查詢法)
SECOND EQU 30H
TCOUNT EQU 31H
ORG 00H
START: MOV SECOND,#00H
MOV TCOUNT,#00H
MOV TMOD,#01H
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
SETB TR0
DISP: MOV A,SECOND
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOVC A,@A+DPTR
MOV P2,A
WAIT: JNB TF0,WAIT
CLR TF0
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
INC TCOUNT
MOV A,TCOUNT
CJNE A,#20,NEXT
MOV TCOUNT,#00H
INC SECOND
MOV A,SECOND
CJNE A,#60,NEX
MOV SECOND,#00H
NEX: LJMP DISP
NEXT: LJMP WAIT
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
7. C語言源程序(查詢法)
#include
unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00};
unsigned char second;
unsigned char tcount;
void main(void)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
tcount=0;
second=0;
P0=dispcode[second/10];
P2=dispcode[second%10];
while(1)
{
if(TF0==1)
{
tcount++;
if(tcount==20)
{
tcount=0;
second++;
if(second==60)
{
second=0;
}
P0=dispcode[second/10];
P2=dispcode[second%10];
}
TF0=0;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
}
}
}
1. 匯編源程序(中斷法)
SECOND EQU 30H
TCOUNT EQU 31H
ORG 00H
LJMP START
ORG 0BH
LJMP INT0X
START: MOV SECOND,#00H
MOV A,SECOND
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOVC A,@A+DPTR
MOV P2,A
MOV TCOUNT,#00H
MOV TMOD,#01H
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
SETB TR0
SETB ET0
SETB EA
SJMP $
INT0X:
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
INC TCOUNT
MOV A,TCOUNT
CJNE A,#20,NEXT
MOV TCOUNT,#00H
INC SECOND
MOV A,SECOND
CJNE A,#60,NEX
MOV SECOND,#00H
NEX: MOV A,SECOND
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOVC A,@A+DPTR
MOV P2,A
NEXT: RETI
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
2. C語言源程序(中斷法)
#include
unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00};
unsigned char second;
unsigned char tcount;
void main(void)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
ET0=1;
EA=1;
tcount=0;
second=0;
P0=dispcode[second/10];
P2=dispcode[second%10];
while(1);
}
void t0(void) interrupt 1 using 0
{
tcount++;
if(tcount==20)
{
tcount=0;
second++;
if(second==60)
{
second=0;
}
P0=dispcode[second/10];
P2=dispcode[second%10];
}
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
}











 工商網監
工商網監
評論