提出了一種基于人類使用的2D語義圖以亞米精度定位圖像的算法,OrienterNet,通過將BEV圖與OpenStreetMap中開放可用的全局地圖相匹配來估計查詢圖像的位置和方向,使任何人都能夠在任何可用地圖的地方進行定位。
2023-05-04 09:15:00 285
285 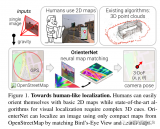
依托機器視覺的機器人定位系統包含攝像機系統和控制系統。 其中攝像機系統中包括計算機(具有圖像采集卡)、攝像機,主要收集視覺圖像,并應用機器視覺算法。
2022-11-30 16:05:49451 二維圖像尺寸測量儀側重于雙遠心鏡頭的整體成像(拍照式),結合高分辨率工業相機及高精度圖像分析處理算法,通過軟件計算后實現測量。外形設計充分利用空間結構,以及人性化設計理念,小巧精致,占地面積小。拍照
2022-10-14 17:13:17
在這幾個領域中,一個最基本的算法就是產品識別和定位,比如視覺引導機器人,要在圖像中識別出要抓取的產品,并定位出坐標,才引導機器人到指定的產品位置。
2022-10-11 15:38:46679 中圖儀器VX系列二維圖像尺寸綜合閃測測量儀采用雙遠心高分辨率光學鏡頭,結合高精度圖像分析算法,并融入一鍵閃測原理。只要在視場范圍內,單次可以測量多個工件,小微型工件甚至可以測量幾十個。只需一鍵,儀器
2022-07-05 15:03:23
中圖儀器VX3000系列二維圖像尺寸批量測量儀器可以滿足各類零部件輪廓尺寸快速測量需求,工件無需定位,任意擺放,一鍵完成二維平面尺寸測量,搭載光學非接觸式測頭還可實現高度尺寸、平面度等參數的精密快速
2022-05-19 15:06:11
分析結果以及用、田所設計的交互式虛擬二維聲源定位系統軟件的使用表明, 該算法是實用和有效的。[hide][/hide]
2009-12-10 16:24:07
室內定位系統方案中,UWB定位技術目前應用較多,得益于UWB定位10-30厘米的超高定位精度。 目前根據使用場景的不同,UWB定位系統的定位維度分為以下4種:0維定位、一維定位、二維定位、三維定位
2021-09-26 15:22:207310 基于灰狼優化算法的機器人源定位追蹤
2021-06-19 11:49:29 5
5 ,更能充分地提取圖像信息,獲取更具有魯棒性的特征,因此基于深度學習的方法已成為二維人體姿態估計算法研究的主流方向。然而,深度學習尚在發展中,仍存在訓練規模大等問題,研究者們主要從設絡以及訓練方式入手對人體姿態
2021-04-27 16:16:077 針對 Taylor算法在TDOA三維定位中受到外界條件的影響而導致大范圍求解失敗的問題,開發TDOA三維定位算法仿真軟件并對 Taylor算法在TDOA三維定位中的應用進行仿真,找到 Taylor
2021-03-24 15:12:3118 介紹了一種基于Altera公司Cyclone2系列Flea芯片的圖像搜索定位視覺識別系統。該系統利用了0V9653 CMOS攝像模塊的分窗口拍攝模式獲取焊點圖像。在Flea中根據一定的圖像處理算法獲取圖像的輪廓,并實現自動搜索定位焊點的功能。
2021-02-03 14:46:268 定位技術是機器人實現自主定位導航的最基本環節,是機器人在二維工作環境中相對于全局坐標的位置及其本身的姿態。目前SLAM (Simultaneous Localization and Mapping即時定位與地圖構建)是業內主流的定位技術,有激光SLAM和視覺SLAM之分。
2020-12-26 10:59:431061 視覺定位是自動駕駛和移動機器人領域的核心技術之一,旨在估計移動平臺當前的全局位姿,為環境感知和路徑規劃等其他環節提供參考和指導。國內知名互聯網公司-美團無人配送團隊長期在該方面進行深入探索,積累
2020-11-13 10:50:054070 
為了進一步提高混沌系統的混沌特性,為圖像加密算法提供更可靠的混沌系統,增強圖像加密算法的安全性,提出了一種基于二維反三角超混沌系統的新型圖像加密算法。首先,在一維三角混沌函數的基礎上構建了一個二維反
2020-08-31 14:23:007 當前機器視覺在各種導航系統中的應用日漸成熟,這種技術正是建立在數字信號和圖像處理成熟理論和算法基礎之上,本系統借鑒機器視覺導航技術主要為智能型道路劃線車提供精確的定位,以使劃線車能夠準確的獲知在道路
2020-08-18 17:20:002 ;(4)將草莓放置在盤中。這4步中的前兩步屬于定位步驟,在整個機器手的設計中具有重要地位。因此,如何設計精準的定位算法是草莓機器手設計的關鍵。目前主流的定位算法大多基于機器視覺技術。
2020-03-02 08:07:00961 為了進一步提高混沌系統的混沌特性,為圖像加密算法提供更可靠的混沌系統,增強圖像加密算法的安全性,提出了一種基于二維反三角超混沌系統的新型圖像加密算法。首先,在一維三角混沌函數的基礎上構建了一個二維反
2019-11-05 16:43:542 可以知,TDOA定位算法通過UWB信號進行基站的同步,定位精度高,UWB標簽功耗低,且標簽容量可以達到上千個,數據延時也非常低,是UWB定位系統方案的首選定位算法。 以上就是UWB定位的三種
2019-11-01 18:55:1314661 算法決定了室內定位的模式。室內定位種類雖然比較多,但是室內定位算法一般都是通用的。總結起來室內定位有3種常見的定位算法。 一、室內定位算法-近鄰法
2019-09-26 18:54:3125465 算法。首先給出基于深度學習網絡的系統整體結構;其次,搭建目標檢測多層卷積神經網絡(CNN),生成自主駕駛機車前方視野范圍內行人的二維坐標及邊界框的尺寸;再次,通過多項式擬合計算出圖像中行人到機車之間的第三維距離;最后
2019-03-28 16:49:5212 本文主要設計一種殘缺二維碼的識別算法,通過設計具備記憶能力的神經網絡,建立殘缺二維碼與電纜信息的映射關系,從而在二維碼因外界原因出現殘缺的時候,能夠讀取與之對應的電纜信息。該算法中的神經網絡采用
2018-11-19 16:01:4425 的定位模式。室內定位種類雖然 多 ,但是 室內定位 算法很多都是通用的,總結起來有下面 3 種常用的算法。 一、 近鄰法 最簡單的方式,直接選定那個信號強度最大的 AP 的位置,定位結果是熱點位置數據庫中存儲的當前連接的 Wi-Fi 熱點的位置。 二、 基于無線信號
2018-07-27 10:50:3211011 
目前RFID定位主要采用LANDARC及其衍生的方法。較常采用的方法是在一個二維平面上,每隔1~2 m擺放一個參考標簽,而且需要4個以上的遠距RFID讀取器,硬件成本較高。
2018-05-02 10:06:006064 
信息來對未知節點進行定位,因此,將定位算法分為基于距離的定位算法以及距離無關的定位算法。 在無線傳感器網絡的節點定位過程中,未知節點在x軸和y軸方向上的定位精度較z軸更重要。為此,在RSSI高斯混合(RGM)算法的基礎上提出一種基于平面投影的定位算法。通過
2018-03-12 14:16:440 三維節點定位問題主要應用于醫療保健、安防及緊急控制等系統。精確的三維節點定位有助于無人系統的發展,無人系統能夠通過無線傳感器網絡( Wireless Sensor Network, WSN)檢測
2018-03-12 13:46:460 基于無線通信和網絡技術的三維空間定位是目前物聯網領域的一個研究熱點,針對當前三維目標定位算法的精度低、復雜度高、功耗大等實際問題,提出了一種新型的分布式三維定位機制。該算法采用合作位置感應算法
2018-02-27 16:21:060 針對城市環境中全球定位系統( GPS)信號易受到高層建筑遮擋而無法提供準確位置信息的問題,提出了一種基于建筑物豎直側平面特征及建筑物二維輪廓地圖的移動機器人定位方法。該方法利用車載視覺,首先對兩視圖
2018-01-30 16:04:131 針對接收信號強度值( RSSI)的時變特性降低定位精度的問題,提出了一種基于二維網格特征參數融合的室內匹配定位算法。該算法融合RSSI和信號到達時間差(TDOA)構建網格特征參數模型,基于二維網格
2018-01-29 11:52:370 未知節點距已知節點可能的橢圓運動軌跡,進而運用牛頓迭代法求解所構造的二次軌跡方程組,實現對未知節點的定位.同時,對定位可能出現的錯誤進行了概率分析,得出錯誤概率與錨點個數之間的函數關系,實驗定位與傳統算法相
2018-01-05 16:28:131 針對如何檢測數字圖像內容是否完整、有無篡改,提高認證圖像質量的問題,提出了一種基于二維直方圖移位的圖像認證算法。首先,在棋盤格結構中利用兩種預測差值計算方法構建原始圖像的二維直方圖,由預先設定的參數
2018-01-03 13:40:100 為了提高WSN節點定位精度,針對測距誤差對定位結果的影響,提出基于模糊C均值聚類的定位算法。算法首先利用多邊定位算法得到若干個定位結果,利用模糊C均值聚類算法對定位結果進行聚類分析,然后,根據聚類
2017-11-09 17:47:1310 特性,增加了樣本的多樣性,克服了重采樣過程中的粒子退化問題,并針對二維平面機動模型進行仿真。仿真實驗表明,本文算法能夠適用于機載無源定位系統,能夠有效的提高濾波精度,跟蹤性能優于經典的粒子濾波算法。
2017-11-08 15:32:321 。但是目前各種RFID 定位算法均是。二維算法6-8,文中提出種RFID.三維矯正定位算法,與原有LANDMARC系統相比,定位精度
2017-10-31 16:08:0413 二維直線閾值分割法所需要的閾值點,由此得到一條閾值直線,根據這條直線在二維圖像中對其進行劃分。該算法抗噪性能優秀,比基于二維Otsu 法葉的直方圖法和二維直線閾值法耗費時間更少,而且過程更簡單,更加適用于實時應用中。
2017-10-30 18:21:3615 為了在生產過程中實現對被測工件尺寸和其它參數精確、快速和可靠測量,設計了一種嵌入式二維圖像測量系統;介紹了其硬件電路原理及實現、二維圖像測量原理、圖像處理算法和應用程序開發;對系統電路的重要單元模塊
2017-09-22 16:08:148 車牌識別(LPR)技術是計算機視覺、圖像處理技術與模式識別技術的融合,是智能交通系統中一項非常重要的技術。一般說來,車牌識別前期的處理技術至關重要,其前期技術包括:車牌的定位、車牌圖像的二值化及字符分割。本文主要針對車牌定位算法進行研究。
2017-09-06 15:14:246 在足球機器人的各種關鍵技術中,機器視覺是應用范圍最廣,最為基本的技術之一。移動機器人視覺的研究主要集中在顏色模型建立、目標識別、定位以及跟蹤等方面。仿人機器人視覺系統的識別與定位算法也是目前的研究
2016-09-21 11:31:5552 移動機器人視覺的研究主要集中在顏色模型建立、目標識別、定位以及跟蹤等方面。目標的實時識別與定位是足球機器人在足球賽中精確踢球的前提。文章主要是針對目前足球機器人在視覺系統上所存在的問題進行了顏色模型建立及目標定位算法的改進,加入了目標追蹤算法,確保目標識別與定位的準確。
2016-09-19 11:18:422412 基于目前思坦水聲定位系統主控軟件系統,采用了水聲二次定位系統的水聲傳播原理,結合水面GPS定位技術,針對水下目標的位置坐標進行精確確定技術的方法編寫的定位算法,通過思坦水聲定位系統主控軟件測試和大量實驗,軟件已經大量使用,研究的水下二次定位系統的定位算法可行性。
2015-12-24 15:43:108 移動機器人激光全局定位系統的算法研究移動機器人激光全局定位系統的算法研究
2015-12-18 16:29:3814 提出了一種新的二維DCT和IDCT的FPGA實現結構,采用行列快速算法將二維算法分解為兩個一維算法實現,其中每個一維算法采用并行的流水線結構,每一個時鐘處理8個數據,大大提高電路
2012-01-12 10:35:5459 為了實現快速穩定無偏定位跟蹤,提出了一種新的雙站純角度快速漸進無偏定位跟蹤算法。該算法通過對未知狀態變量含二次約束的偽線性方程進行約束最小二乘(CLS)極小化處理,最
2011-10-08 15:33:1830 本內容提供了復雜背景圖像中的車牌定位算法
2011-05-19 10:50:1747 摘要! 以利用投影特征將二維數據簡化為一維的算法為基礎! 提出了一種基于平移量的機器 人灰度圖像匹配算法!以減少計算時間并提高計算效率 本算法實時性強!時間復雜度小 經過實驗
2011-03-29 16:43:2236 文中提出新的高精度, 快速二維聲源定位算法。計算機采集四個聲音傳感器, 一個風速傳感器和一個風向傳感器的信號, 計算出聲源的位置和當地的聲速。用語言進行的仿真分析結
2010-07-08 16:10:08134 二維最大相關法圖像分割算法充分利用了圖像像素的灰度分布信息和各像素間的空間相關信息,因此算法的抗干擾能力強、圖像分割效果好。但該算法的搜索空間大、計算時間長。
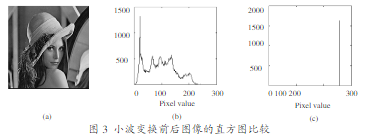
2010-07-08 14:51:4718 一種基于二維離散小波變換的醫學圖像增強算法
噪聲是影響醫學圖像質量的最重要的因素之一。去除噪聲,增強圖像以提高圖像質量是醫學圖像處理的重要課題。傳
2010-02-22 17:15:5151 針對相干分布式信源二維波達方向估計算法多采用譜峰搜索導致計算復雜度較大的問題,該文提出了一種二維波達方向分離估計算法。該算法通過將積分形式的相干分布式信源方向
2009-11-24 15:19:3715 以 QR 矩陣碼為例,介紹一種實用的二維條碼識別算法。首先探討了二維條碼的定位與分割算法,利用Hough 變換與Sobel 邊緣檢測把條碼圖像從原始采集的圖像中有效地分割出來;然
2009-08-12 17:30:0639 本文提出一種將時空二維混沌應用到數字水印中去的算法。首先利用時空二維混沌直接生成信息模板,加入到作品圖像離散余弦變換(DCT)域的頻率成分中去。合法使用者通過時
2009-07-15 11:13:0410 對機器視覺二維反求測量系統進行了研究,以實現二維復雜平面邊緣尺寸的數字化錄入。采用虛擬網格技術實現大場景下的測量標定。利用雙CCD 分區域獲取圖象,通過設置規則參照
2009-07-11 11:05:1810 本文介紹了一種采用激光定位技術,利用二維CMOS圖像傳感器(OV7110)作為敏感元件、通過CPLD接口電路與DSP處理器鏈接組成的二維圖像位移傳感器,此傳感器通過通訊接口輸出實時
2009-07-02 09:18:5229
 電子發燒友App
電子發燒友App


















 工商網監
工商網監
評論