 電子發(fā)燒友App
電子發(fā)燒友App


如今,增強現(xiàn)實(AR)是一個著名的概念,但它的起源可以追溯到60年代,當時Sutherland在1968年提出了第一個公認的基于頭戴設備(HMD)的增強現(xiàn)實原型(AR)。在薩瑟蘭之后,20多年過去了,增強現(xiàn)實這個術(shù)語才由Tom Caudell和David Mizell這兩位受雇于波音公司的科學家正式創(chuàng)造出來,他們開發(fā)了一個實驗性的增強現(xiàn)實系統(tǒng),目的是簡化空氣公司的制造過程。AR的概念直到1994年才被Milgram和Kishino作為實空間、虛空間和混合空間的所有中間形態(tài)之間的關(guān)系正式提出。1999年,ARToolKit在SIGGRAPH上公開發(fā)布,這是第一次在美國的研究實驗室之外看到一個可用的AR系統(tǒng),這預示著AR行業(yè)的開端,AR行業(yè)在兩年之后就以開源軟件的形式發(fā)布了。
直到幾年前,缺乏價格低廉的設備是廣泛采用AR應用程序的主要障礙。
如今,移動設備的廣泛應用消除了這一限制,因為智能手機和平板電腦擁有開發(fā)和部署AR應用程序所需的所有傳感器和處理單元。全球增強現(xiàn)實市場發(fā)展迅速,增強現(xiàn)實技術(shù)的廣泛應用對社會產(chǎn)生了不可否認的影響。
總的來說,AR在工業(yè)領(lǐng)域的應用是相關(guān)的,因為它極大地改善了產(chǎn)品設計和生產(chǎn)開發(fā)中的溝通:它有助于在開發(fā)過程的早期階段識別和避免設計錯誤;它減少了物理原型的數(shù)量,為企業(yè)節(jié)省了時間和成本。在許多工業(yè)應用中,增強現(xiàn)實被認為是改善和加速產(chǎn)品和過程開發(fā)的有價值的工具。
現(xiàn)在可以確定AR在工業(yè)領(lǐng)域的至少五個主要應用領(lǐng)域:人-機器人協(xié)作、維護-裝配-維修、培訓、產(chǎn)品檢驗和建筑監(jiān)控。在人機協(xié)作領(lǐng)域,AR用于創(chuàng)建與工業(yè)機器人交互的高效接口。在維護-裝配-維修任務中,AR提高了他們自己的生產(chǎn)力。在培訓操作中,用戶可以在AR中找到增強技能的強大解決方案。在產(chǎn)品檢驗過程中,控制人員可以使用功能強大且多功能的AR系統(tǒng)來發(fā)現(xiàn)產(chǎn)品的任何差異。最后,在建筑物監(jiān)控操作中,AR以簡單直觀的方式強調(diào)設施的任何錯誤或偏差。
人機協(xié)作
第四次工業(yè)革命帶來了新的技術(shù)挑戰(zhàn)。工業(yè)機器人的能力在穩(wěn)步提升,合作互動的預期也在增強。操作員需要在一個安全的環(huán)境中工作,以增強他們對機器人的信任。為了創(chuàng)建一個機器人與人類并肩工作的系統(tǒng),必須開發(fā)新的界面,讓用戶以最自然的方式與他們互動。由于這些原因,新的科學學科正在出現(xiàn)。人類機器人協(xié)作(Human Robot Collaboration, HRC)是一門新的科學學科,它試圖了解如何使用創(chuàng)新的接口來改進人類與機器人的協(xié)作。創(chuàng)造一個安全可靠的人-機系統(tǒng)是一項復雜的挑戰(zhàn)。一個人與人的協(xié)作系統(tǒng)被認為是安全的,因為一個人可以自然地理解另一個人的意圖。在機器人的例子中,同樣的行為可以提前向用戶顯示機器人在真實環(huán)境中將要應用的動作或力量:這樣操作員就可以清楚地了解機器人的意圖。AR確實可以用來實現(xiàn)這個目的,因為它能夠在真實的環(huán)境中顯示信息,提高操作人員對系統(tǒng)的認識。在眾多應用中,AR是一項很有前途的技術(shù),它可以增強用戶的理解能力。
移動機器人運動
工業(yè)通常使用自動導向車輛(AGV),而不是使用人類熟練工人進行物質(zhì)運輸。AGV是一種可以獨立移動的機器人,通常用于在生產(chǎn)設備周圍運輸設備。大多數(shù)情況下,AGV遵循預先定義的路徑,一方面使工作人員能夠很容易地預測機器人的意圖,另一方面它對AGV能夠執(zhí)行的任務類型施加了一些限制。下一代AGV將能夠在不遵循預定路徑的情況下移動,并能夠?qū)崟r決定在給定環(huán)境下最佳的軌跡。這種行為引入了一定程度的不確定性,因此車輛意圖的溝通必須盡可能清晰。事實上,提高這些系統(tǒng)安全性的一種方法可能是賦予機器人理解和預測人類運動的能力。然而,創(chuàng)建這樣一個智能系統(tǒng)是一項復雜的任務,因為人類是高度不可預測的。一個合理的選擇是把理解他人意圖的負擔從機器人身上轉(zhuǎn)移到人類身上。為了保證這個系統(tǒng)的安全性,機器人必須明確地表達它將要進行的預期動作:由于視覺是人類最發(fā)達的感官之一,通過可視化系統(tǒng)明確地表達預期動作無疑是一個很好的選擇。此外,可視化系統(tǒng)可以使用AR技術(shù)來顯示機器人在真實環(huán)境中的預期運動。一些項目已經(jīng)采用了這種方法:例如,Chadalavada等人在Linde CitiTruck AGV上增加了一個標準投影儀(Optoma ML 750)。投影儀用于直接顯示機器人在地板上的運動,使人類能夠在幾秒鐘的時間范圍內(nèi)探測到它未來的運動。
機器人的手臂運動
在工廠中,完成不同的任務,其中一個任務由取放動作或裝配過程表示。這些活動通常是由所謂的“手臂機器人”執(zhí)行的,它們能夠抓取物體并將其放置在特定的區(qū)域。對于AGV的運動,提前了解機器人手臂所走的路徑對人類預測機器人的意圖至關(guān)重要。一些研究正在探索使用AR來可視化機器人手臂在真實環(huán)境中的運動。Ameri等人開發(fā)了增強現(xiàn)實系統(tǒng),改善了工人和工業(yè)機器人之間的互動。通過這個AR界面,工作人員不僅可以知道要抓取哪些對象,還可以知道機器人將遵循哪些軌跡:這樣一來,用戶就可以決定取消他們在執(zhí)行機器人之前給出的錯誤命令。
顯示機器人的意圖信息可以改善協(xié)作系統(tǒng),但不僅要考慮信息的類型,還要考慮顯示信息的時間。理解何時必須顯示數(shù)據(jù)是最基本的,因為工作人員必須在正確的時間知道正確的信息,以便準確地理解機器人在做什么,從而感到安全。魯法爾迪(E Ruffaldi)等人提出了一個系統(tǒng),在這個系統(tǒng)中,HRC的工作頭盔中集成了一個增強現(xiàn)實立體眼鏡,以及一個用于協(xié)作應用的仿人機器人(Baxter robot,來自Rethink Robotics)。作者的目標是顯示關(guān)于機器人在特定時間正在做什么的信息,而不給操作員帶來過多的數(shù)據(jù)。具體來說,如果機器人識別的對象在操作員的視野內(nèi),則在平視顯示中對該對象進行增強。此外,在末端執(zhí)行器附近放置一個三維箭頭來顯示機器人的運動方向。
維護、裝配和修理
維護、維修和裝配任務是AR的另一個戰(zhàn)略研究領(lǐng)域,因為降低成本是許多行業(yè)的一個關(guān)鍵目標。這類任務帶來的問題之一與它們的復雜性有關(guān):技術(shù)人員可能需要參考指導手冊來正確完成指定的程序。在程序所涉及的設備和手冊之間持續(xù)切換注意力可能會給技術(shù)人員帶來很高的認知負荷。
交互式電子技術(shù)手冊(IETMs)已被提出,以解決與標準技術(shù)手冊(TM)相關(guān)的不準確性和困難,其在提高專家和沒有經(jīng)驗的技術(shù)人員的性能方面的有效性已被證明為。然而,IETMs并不完全是技術(shù)人員和機器之間交互過程的一部分,事實證明,這種分離增加了任務的時間和成本,也增加了技術(shù)人員的認知負荷。
AR可以輕松有效地解決TMs和IETMs所帶來的分離問題,并對AR在維護、維修和裝配任務中帶來的好處進行了全面的分析。基于ar的文檔已被證明可以將成本降低25%,并將性能提高30%。國際數(shù)據(jù)公司(IDC)預測,現(xiàn)場組裝和安全將吸引投資基于“增大化現(xiàn)實”技術(shù)和虛擬現(xiàn)實技術(shù)在未來四年3.62億美元,到2021年底,工業(yè)維護將是最大的工業(yè)用例高達52億美元的投資。
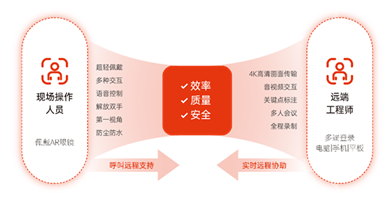
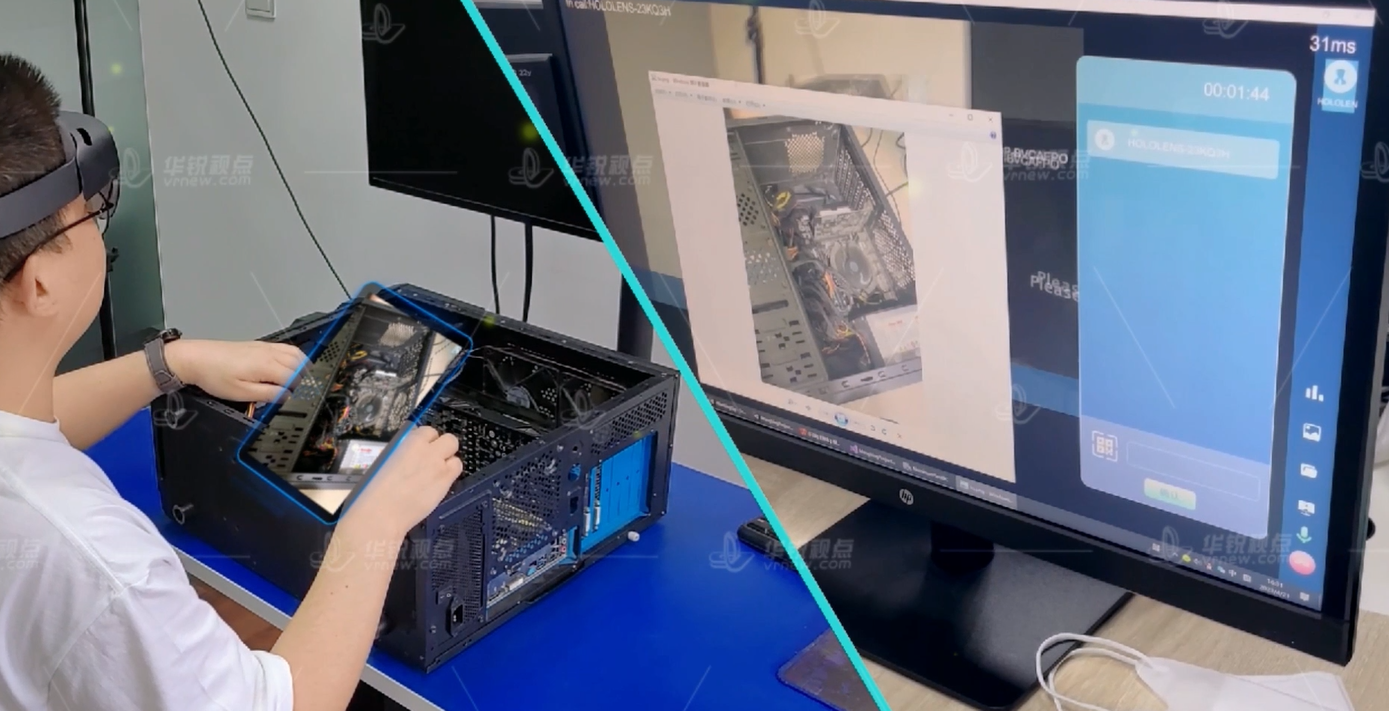
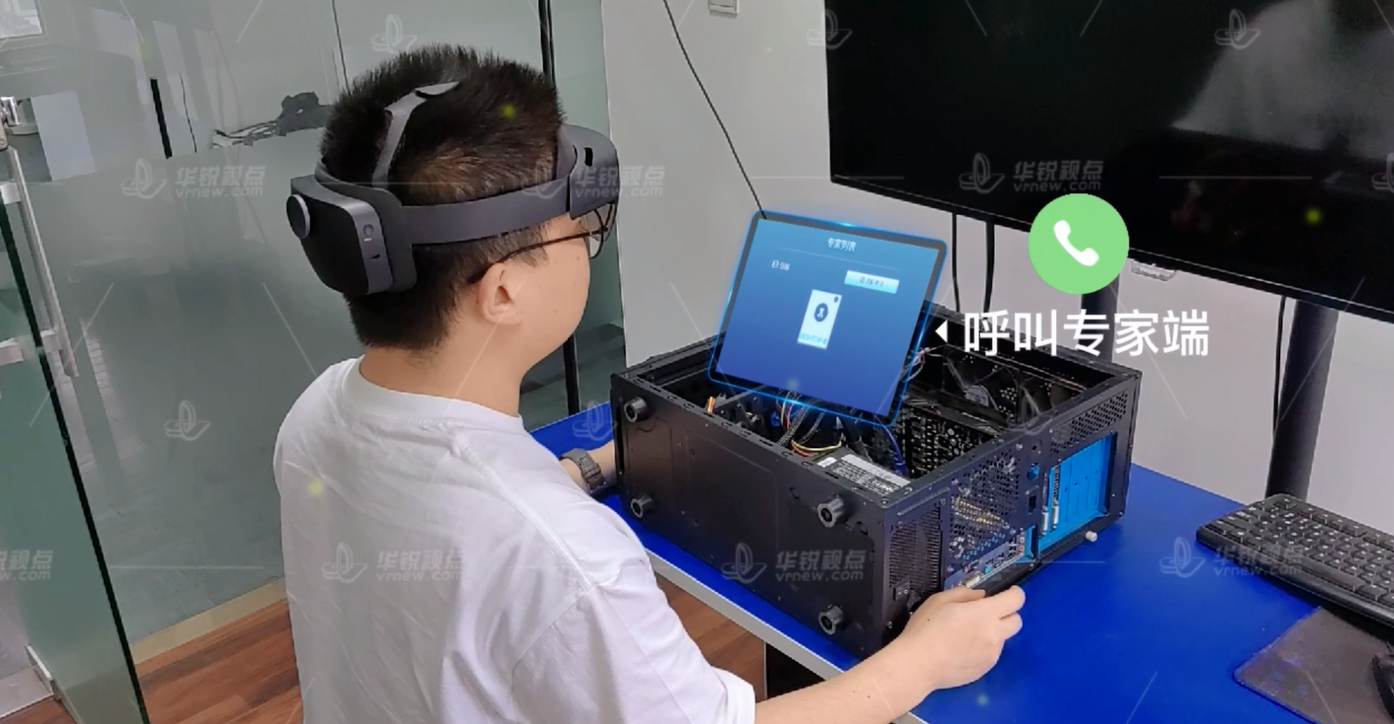
用于維護和修理的AR應用由一組虛擬資產(chǎn)組成,這些虛擬資產(chǎn)向技術(shù)人員提供指示、幫助或建議。最常見的資產(chǎn)包括帶有指令的音軌、動畫3D模型(可視化地描述要做什么)和文本標簽(提供要執(zhí)行的任務的詳細信息)。圖形資產(chǎn)被覆蓋并與要維護的機器對齊,使技術(shù)人員能夠在執(zhí)行過程中利用它們。此外,這類AR應用通常包含遠程呈現(xiàn)系統(tǒng),當AR輔助不夠時,遠程技術(shù)人員可以交互式地支持維護人員。
培訓
用于培訓目的的AR技術(shù)的使用與維護、組裝和維修任務嚴格相關(guān),因為它們通常是來自行業(yè)領(lǐng)域的用戶學習的對象。增強現(xiàn)實技術(shù)改進傳統(tǒng)的學習方法已經(jīng)深入研究多年,因為教師、教師和培訓人員一直在尋找新的方法,以提高他們的學生的學習經(jīng)驗,并發(fā)展創(chuàng)新的學習和培訓路徑。多媒體內(nèi)容不僅可以提供豐富的感官體驗,增強用戶機器和用戶用戶交互,而且還可以增強讀者或觀眾的動機和興趣。不同研究背后深層原因調(diào)查報告關(guān)于程序性錯誤,說明一些維修故障不是由于缺乏適當?shù)娜蝿招畔?并基于“增大化現(xiàn)實”技術(shù)被認為是一個有價值的工具,用于支持任務執(zhí)行由于其能力來增加用戶的動機。與使用AR技術(shù)進行培訓相關(guān)的另一個重要好處是,AR允許模擬危險或危險的任務,甚至是破壞性的事件,而不會對學生造成任何風險。
產(chǎn)品質(zhì)量控制
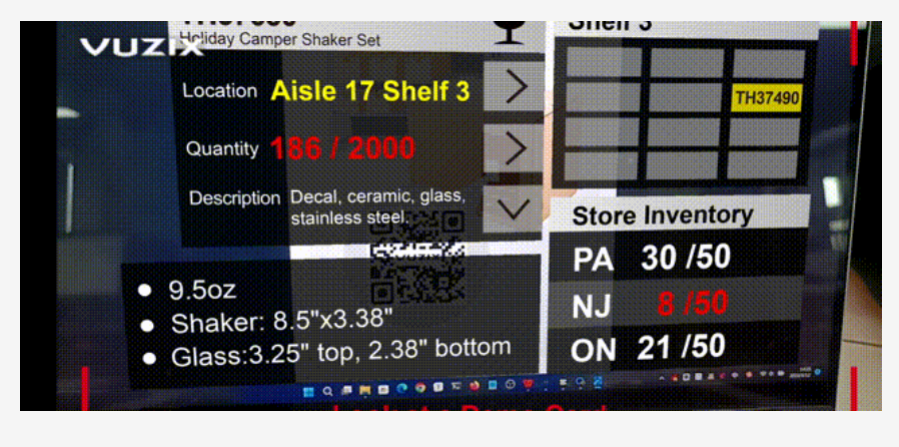
創(chuàng)建產(chǎn)品是一項復雜的任務。產(chǎn)品制造經(jīng)歷了構(gòu)思、設計和實際實現(xiàn)幾個階段。一旦實現(xiàn)了一個產(chǎn)品,就會檢查它,以檢查在創(chuàng)建階段是否沒有發(fā)生錯誤,以及與所估計的結(jié)果是否存在差異。出于效率方面的考慮,整個過程應該盡可能快速和準確地完成。在公司的管理和產(chǎn)品的實際生產(chǎn)中,滿足完美標準的趨勢日益增長。在生產(chǎn)鏈的末端,質(zhì)量控制非常嚴格;為了向市場投放最能滿足最終用戶期望的高效產(chǎn)品。對于商業(yè)資產(chǎn),使用包含不可接受的產(chǎn)品缺陷的列表來直觀地檢查產(chǎn)品。這個過程通常稱為檢查。檢驗可以在不同的領(lǐng)域進行,例如制造、商業(yè)、政府、機械,它包括對特定設備或過程的有組織的檢查。由于產(chǎn)品種類和細節(jié)的增加,檢驗任務變得更加復雜。因此,由于人類檢查員的認知局限性,檢查可能變得不那么有效。AR顯然是一種很有前途的技術(shù),因為它可以直接比較真實物體和理想模型。事實上,使用可穿戴設備,操作者可以將理想物體的三維圖像直接疊加在被檢查的產(chǎn)品上。這個過程通常被稱為“差異檢查”。
構(gòu)建監(jiān)測
構(gòu)建環(huán)境是復雜的結(jié)構(gòu),由需要合適基礎設施的不同機器組成的系統(tǒng)組成。建設這樣的環(huán)境是一項艱巨的任務;每個系統(tǒng)由不同的子系統(tǒng)(柱子、管道、房間等)組成,這些子系統(tǒng)必須被放置在適當?shù)奈恢谩Mǔ#@些子系統(tǒng)使用3D模型表示,工廠使用計算機圖形進行預可視化。通過這種方式,可以將每個子系統(tǒng)定位在適當?shù)奈恢茫瑱z查任何碰撞或其他精靈不規(guī)則的。
lw





















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論