 電子發燒友App
電子發燒友App


目前,計算機技術加上適當的軟件已被有利地應用于實踐的各個領域。如果沒有適當的計算機輔助(CA)系統,很難想象現代企業中新產品的開發和生產。目前大多數CA系統主要是在新產品的計算機設計領域確定和使用,但只有將這些現代計算機技術完全應用到產品設計和制造的各個階段,才能為企業帶來最大的利潤。計算機輔助制造(CAM)系統在與計算機支持相關的生產領域中使用多年。這些系統的開發的流行領域是計算機輔助程序創建的數控(數字控制)生產設備,從完成的生產過程的觀點來看,只代表了其中的一部分。產品制造過程中還有其他的過程,例如:在制品的自動運輸和產品儲存,產品的自動處理,在自動化檢驗臺上進行測量,等等。所有這些部件都是由計算機輔助制造工程系統(CAME)定義的。為了更好地展示制造過程和更好地實現這些領域的教育,使用增強現實是一個非常好的想法。從這個角度來看,增強現實輔助制造的定義和實際應用也是非常好的想法
計算機輔助制造、虛擬制造和增強現實輔助制造
計算機輔助制造(CAM)系統是用于準備數據和程序的系統,用于數字控制機器的自動化生產的機械零件,整個組件,電子電路等。這些系統主要利用計算機輔助設計(CAD)系統對零件進行計算機設計時獲得的幾何數據和其它數據分別進行產品設計。
計算機輔助系統的歷史主要是計算機輔助設計和建造的歷史,因此它是與計算機圖形學的歷史相結合的。在引入計算機圖形學之前,用計算機創建和操作實體是不可能的。CAD和構造被簡化為計算。
CAM是從50年前開始設計NC機器的概念。這是電子技術和后來的計算機技術進入生產支持領域的第一個推動力。然而,更廣泛的發展CAM是通過創造概念的計算機數控(CNC)生產機器,這可以追溯到1970年。由于CAM系統允許CAD系統創建的產品幾何形狀的數據,可以直接用于為數控和數控生產機器創建數控程序。80年代出現了計算機輔助設計和計算機輔助制造領域的大系統;這些系統就是所謂的CAD/CAM。長期以來,個人計算機領域對CAM系統的吸引力不大。這主要是由于這樣的事實,為電腦CAD系統的設計只對2 d圖紙關于他們的小計算性能和這些沒有處理函數用于創建固體模型,從形狀是可能獲得項目數控生產機器,也不允許創建有效的數控程序,因為他們的小的計算性能。在90年代初,大型CAD/CAM系統在工作站工作,只適用于CAM領域。在Unix下工作的計算機的計算和圖形性能相對于PC有了很大的提高,這主要歸功于1990 - 1994年間Silicon Graphics公司的產品。在90年代的后半段,PC組件的開發領域有了長足的發展,處理器奔騰、奔騰Pro、奔騰II在性能上對工作站來說是有競爭力的,但價格只是部分的,這使得CAM系統的開發人員也能適應PC領域,從而使CAM的優勢惠及更多的用戶。
虛擬制造被定義為一種集成的綜合制造環境,旨在增強決策和控制的所有級別。它可以分為以設計為中心,以生產為中心和以控制為中心。以設計為中心的虛擬制造是用于設計和評估產品可制造性的仿真環境。以生產為中心的虛擬制造是用于生成流程計劃和生產計劃的模擬環境。以控制為中心的虛擬制造是用于車間生產活動的模擬環境。虛擬制造包括快速改進制造過程,而無需利用機器的運行時間資金。據說虛擬制造是將桌面虛擬現實系統用于制造組件和過程的計算機輔助設計。毫無疑問,虛擬制造可以輔助實際的制造過程和系統,并且隨著信息技術,制造系統和業務需求的發展而完善。在這種情況下,虛擬制造應被視為真實制造系統的高級信息結構,該結構集成了可用的信息工具和虛擬環境的沉浸性,以實現業務制造目標。
增強現實(AR)是虛擬現實研究的一個新興領域。我們周圍的世界環境提供了大量難以在計算機中復制的信息。虛擬環境中使用的世界證明了這一點。 AR系統為用戶生成一個復合視圖。它是用戶觀看的真實場景與計算機生成的虛擬場景的組合,該虛擬場景用附加信息增強了場景[5、6]。應用領域表明,擴充可以采用多種不同形式。在所有這些應用程序中,呈現給用戶的增強現實增強了該人在世界上的表現和對世界的感知。最終目標是創建一個系統,使用戶無法分辨真實世界與虛擬現實之間的區別。對于該最終系統的用戶而言,似乎他正在看一個真實的場景。現實世界和完全虛擬的環境位于此連續體的兩端,中間區域稱為混合現實。增強現實位于該行的現實世界的盡頭,主要的感知是通過計算機生成的數據增強的現實世界。增強虛擬性是Milgram創建的一個術語,用于標識大多數是合成的系統,并添加了一些真實世界的圖像,例如將視頻映射到虛擬對象上。隨著技術的進步,這種區分將逐漸消失,并且場景中的虛擬元素與真實元素之間的區別也越來越小。米爾格拉姆還將增強現實系統放在存在隱喻范圍的低端。該軸測量用戶在顯示場景中的沉浸程度。此分類與系統使用的顯示技術密切相關。這些都給人不同的沉浸感。在增強現實系統中,這可能會產生誤導,因為在某些顯示技術中,“顯示”的一部分是用戶對現實世界的直接查看。米爾格拉姆用于對混合現實顯示進行分類的第三個也是最后一個維度是世界知識范圍。增強現實并不僅僅意味著在現實世界場景上疊加圖形對象。從技術上來說,這是一件容易的事。如此處定義的,增強現實的一個困難是需要維持虛擬對象與真實世界圖像的精確配準。這通常需要詳細了解現實世界的參考系,查看它的相機和用戶之間的關系。
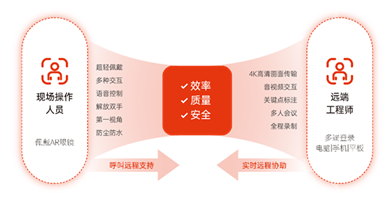
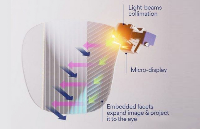
增強現實輔助制造(ARAM)代表了增強現實技術在制造過程表示領域中的應用新思想。 ARAM是計算機集成制造系統的特殊子系統,包括與產品制造的實現相關的所有活動的增強現實輔助系統(操作編程,機床,運輸和存儲設備,零件和組裝產品的測量,測試和診斷) 。復雜CIM中的增強現實輔助系統的這一階段有效地建立了增強現實輔助系統在生產的技術(構造和工藝)準備中的應用,這對于確保并行工程條件是不可避免的。增強現實輔助制造的主要思想如下圖所示。
增強現實輔助機器人控制
增強現實利用硬件和軟件工具來創建混合環境,該混合環境將通常以視頻序列形式出現的真實場景與包含附加對象虛擬模型的增強場景相結合。在增強現實中常用的幾種技術中,有幾種試圖實施到機器人編程系統中。在斯洛伐克普雷索夫的計算機輔助制造技術部門實現的新創建環境的中心對象是瑞典生產商ABB的機器人設備-緊湊型機器人IRB 140。
在創建適合實現實時任務(例如,機器人設備的編程)的增強現實環境時,我們必須考慮連續空間校準的問題,以保持真實和虛擬場景在空間上的對齊。一個一致的工作場所的最終形式。為此,我們將眾所周知的3D數字化設備Kinect與稱為Skanect的專用軟件工具結合使用。
Kinect首先允許我們獲得真實環境的3D掃描,并在創建虛擬環境時使用該真實數據。掃描中的實體可作為在計算機模型和諸如機器,桌子,機器人基座之類的真實物體之間生成空間鏈接的參考。其次,利用深度傳感器實時感測工作場所的能力為我們提供了環境和所有隨附設備的直接校準。
在Blender應用程序的軟件環境中實現了混合空間的生成以及兩個部分的共同校準。這個功能強大且復雜的圖形化解決方案提供了許多有用的工具,庫和子例程,這些對象,對象和子例程具有出色的圖形概述水平,所有內容均基于開源哲學的原理。
為了實時檢測重要物體的位置,我們使用了顏色標記技術。機器人和其他設備(臺式,銑床)的表面上會粘有不同顏色的細紙條。它們既可以很容易地被攝像機定位,也可以從機器人運動描述的角度考慮。
彩色條紋是成對監視的,而每對則由兩條在垂直方向上彼此相鄰的條紋組成。這樣,相同顏色的條紋會創建一個圖形標記,可用于監視每個機器人軸的精確位置。接下來,在Blender環境中調用的相關命令行激活顏色跟蹤過程,以檢查實際機器人的位置并重新計算軟件環境中各個運動軸的坐標。然后可以在真實模型的基礎上調整或建議(編程)機器人模型的位置和方向。這意味著程序員還可以在從舊的位置或實際的機器人位置開始的同時創建新程序的序列(可以在在線/離線混合模式下創建程序)。
顯示增強現實環境的新視角可能性是使用特殊的可視化單元,該單元利用了玻璃鏡介質的組合原理。玻璃表面要么是半鍍銀的,要么是半滲漏的鋁箔棒,可產生反射,同時可無障礙地觀看工作環境或降低畫質。
這種常見的鏡子通常用于游戲,醫學或商務演示中。通過兩個看似不同的視圖的光學連接,它為創建逼真的空間效果創造了理想的平臺。顯示是視圖向反射面的反向發射。它可以由放置在工作區域上的計算機顯示器或經典投影儀提供。
隨著投影儀及其顯示技術的發展,可以利用LED投影的優勢。與傳統的投光器相比,LED技術不會產生會以光斑形式反射在顯示屏玻璃上的發光錐。整個場景的設置變得更加容易,因為您可以將設備安裝在必要的顯示角度,而無需防止直接的光反射。在圖2上顯示了與實際機器人工作單元活動相比,使用半鍍銀鏡表示工業機器人活動的虛擬模型的情況。
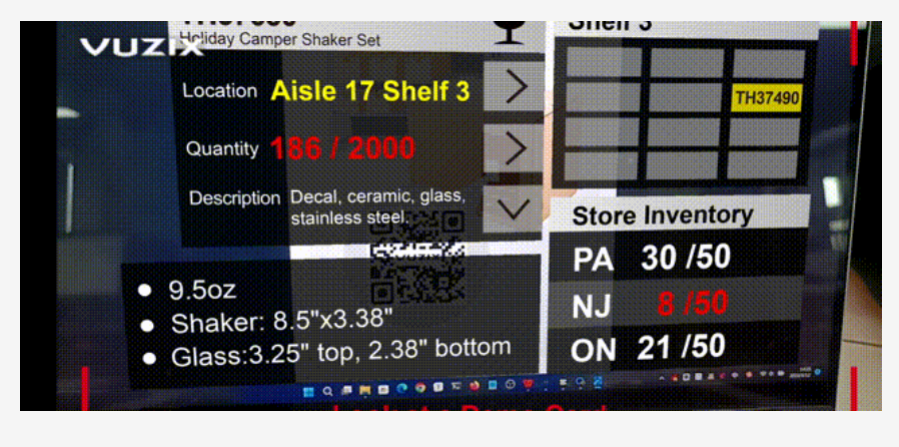
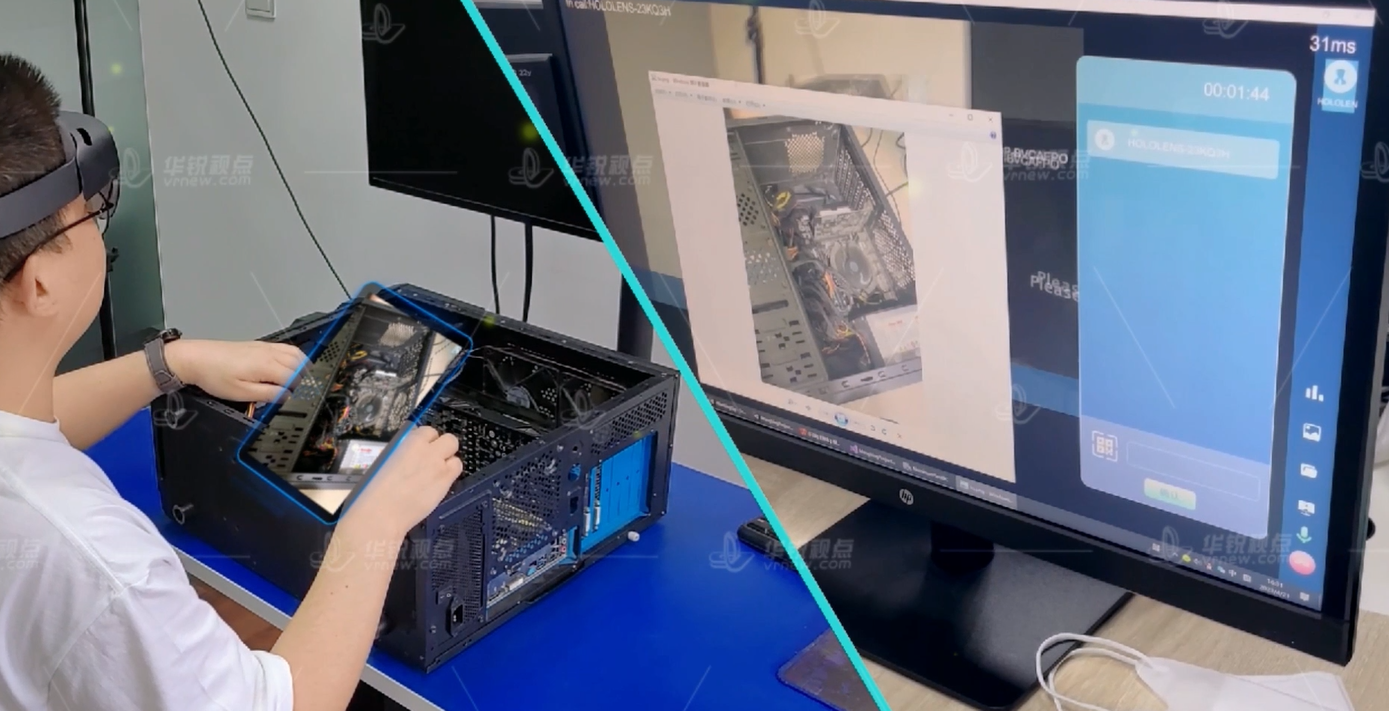
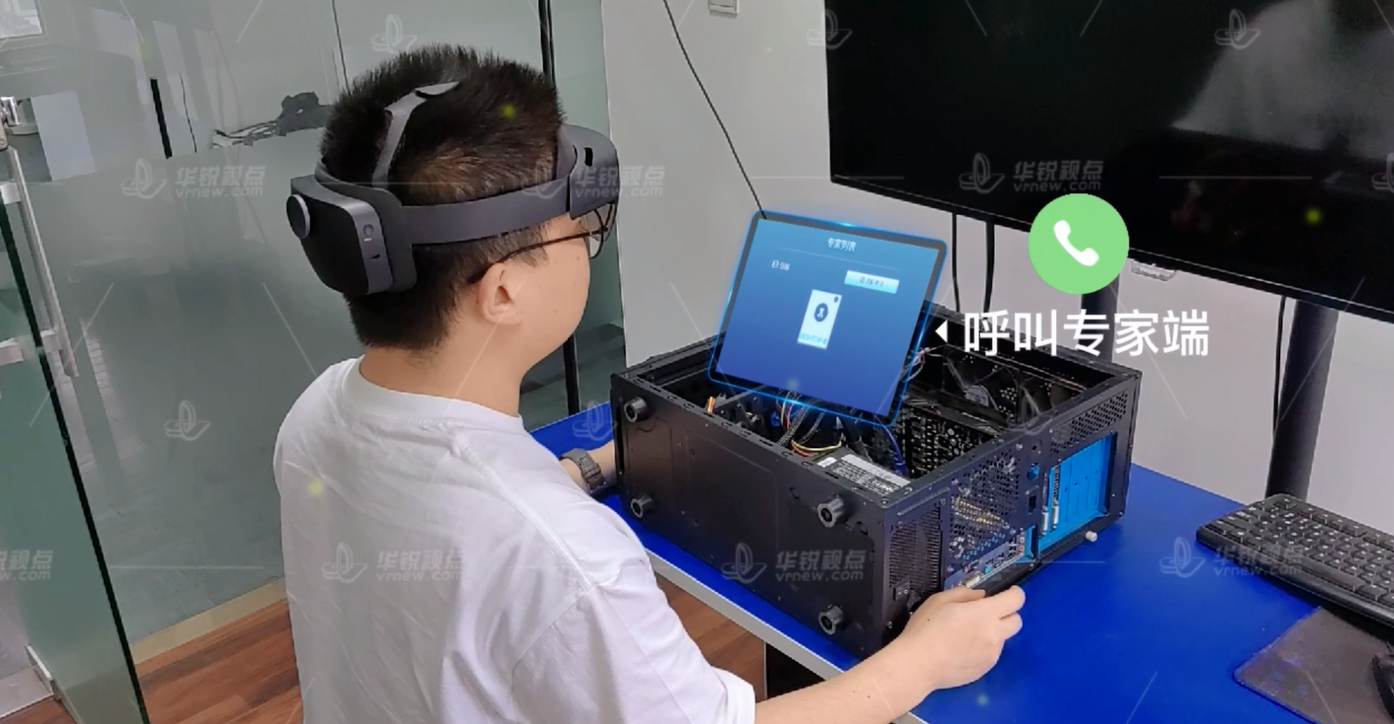
在下文中可以找到使用增強現實進行教學的一個示例。該系統的主要目的是向汽車工程專業的學生教授自動變速器的拆卸/組裝程序。系統包括車輛變速箱,一套工具和機械設備,兩臺攝像機,帶有開發軟件的計算機,HMD眼鏡和兩個LCD屏幕。開發的軟件借助視頻流上的AR對象,給出了組裝和拆卸過程的指導。
技術工作區上的3D指令疊加可以用作交互式教育材料。來自攝像機的視頻流增加了應拆卸的機械零件。
應用動畫和其他視覺效果可以更好地指示當前指令。在培訓期間,學生可以看到零件及其順序。還將顯示所需的工具和技術操作。結果,該系統逐步指導學生完成組裝/拆卸順序。先進的增強現實系統使教育過程更加有趣和直觀。
在開源虛擬環境中,使用稱為可視腳本的過程來開發具有邏輯行為循環的工作的程序和編程順序。通過使用這些工具,該應用程序允許工程師管理應用程序不同邏輯核心之間的整個數據流(圖3)。
下一部分將提供有關單個邏輯區域的更詳細視圖,在該區域中,將收集必要的數據并將其與虛擬數組中的值進行比較,然后將它們發送到增強現實的顯示部分。在接下來的階段中,將在理論層面上描述新應用程序的一般過程和邏輯步驟。該應用程序包含4個主要邏輯級別,其中數據包不僅來自內部計算機元素,而且還來自外部設備(例如傳感器和測量設備)。
這些循環中的第一個循環觀察按鈕部分,該部分提供有關確認過程的信息。通過這些按鈕,稱為顯示部分的邏輯循環會觸發查看過程(初始位置和最終位置)。
下一個循環包含兩個基本區域(用于測試和比較的區域,用于位置設置的區域)。來自這些提及區域的數據包包括有關所有虛擬物品名稱及其初始矢量的相關值的信息以及有關位置最終參數的信息。然后,從外部傳感器收集的數據將被發送到該區域進行測試和相互比較,還發送到該區域以設置位置(初始,最后一個)。
在這些過程的基礎上,所有新的位置和方向信息都再次發送到應用程序的邏輯核心,在應用程序的邏輯核心之間對新接收到的參數進行測試,比較和評估。之后,顯示部分能夠根據虛擬物品的軌跡看到其運動過程。 AR組裝的整個過程如圖4所示,其中3D零件在虛擬軌跡上移動,并為每個零件(同一環境中的真實零件和虛擬零件)的最終位置提供準確的值。為了更好地理解,圖4給出了應用程序改進元素的視圖,其中每個零件具有不同的顏色,并且可以更清楚地創建裝配而不會出錯。
增強現實元素的現有應用方法是基于對真實環境的視覺拍攝(使用標準相機),并且其覆蓋由軟件的邏輯核心管理
應用。盡管效率高,但存在以下缺點:必須監視位于實際組件空間之外的視場,這會導致負面的同步問題。為了防止出現此問題,基于獨立工作環境的理念創建了新的可視化單元,從而增加了應用程序的交互性以及用戶的舒適感。該單元利用直接位于工人視野內的半鍍銀表面。原則上,這是一種特殊的玻璃,其表面為半鍍銀的或半透明(反射)的箔,可提供必要的反射,但同時又可以將玻璃直接看到工作區域。得益于此特性,鏡子可以反射圖像的一半,同時可以透視。這是生成深層空間場景的理想平臺。整個成像過程可以解釋為由位于用戶視場之外的,位于鏡子上方的LCD顯示器實現的圖像反向發射。在實現了這些成像過程之后,發現了主要缺點,因為圖像的顯示和質量合適但受單一條件的限制-用戶已牢固地設置了視點,并且在任務實現期間不動。
圖4是在普雷索夫(斯洛伐克)的計算機輔助制造技術部開發的增強現實輔助裝配系統的示例。
由于在Blender系統中創建的應用程序中,我們實現了這種不需要的狀態,因此我們實現了人臉跟蹤腳本,該腳本使用了稱為OpenCV的免費可訪問數據庫的庫和程序元素。 AR應用程序中使用的面部跟蹤提供了設置關系和編程順序的可能性,這些順序和編程順序可根據用戶面部的位置和方向實時處理所創建的虛擬環境的調整。這意味著用戶可以自由移動頭部或身體,而不會丟失AR圖像或將其與真實視頻序列的圖像分離。
本文的這一部分提到了特定功能的三個主要應用領域,這些特定功能在應用中用于利用AR元素實現組裝過程。這些有效改進的目的在于提高用戶的舒適度,并提高整體質量和實現的組裝活動的復雜性。
1.裝配過程的音頻支持:該應用程序最期望的利用之一是在訓練模式下實現裝配,最終是在沒有首次嘗試的情況下正確構建整個裝配的努力。
對于更好的用戶前景和用戶的信息意識并從而確保防止錯誤的合適的解決方案是利用迄今未使用的感覺可以接受的形式的信息來增強應用程序。程序包括簡短信息輸入和蜂鳴聲或錄制的口頭指示形式的音頻信號。
2.更好的文本信息:通過從文本文件獲得更好的信息輸入質量,最終獲得更好的工作環境,最終在虛擬工作環境中更好地集成文本數據。文本信息以更廣泛的交互式文本菜單的形式顯示,在單擊特定條目后,將顯示其他信息。
3.評估單元支持的工作環境的交互性:監視和評估單元形式的用戶舒適度的想法是基于程序的邏輯周期,該邏輯周期基于實時使用的顏色跟蹤技術,同時比較裝配周期的序數并根據在預定義的初始條件下,它會評估工作周期中每個時刻的實際零件是否合適(圖13)。
這些工具的組合允許觀察工作環境及其周圍環境,以及在3D虛擬應用程序中實現的組裝過程。實現此功能的條件在于在開源軟件環境中管理和統一編程和設置部分。這里的主要編程任務是確保實時實時監視和比較真實視頻序列和虛擬對象之間的過程。
該應用程序的利用結合了常規文本和圖形匯編指令的所有優點,而所有提供的信息均以易于使用和接受AR工具的方式呈現。 3D指令甚至可以豐富音軌,其他文本視覺信息和動畫
效果。用于組裝過程的增強現實應用程序涉及有關可用于創建增強工作環境的開源工具的軟件問題。它還處理硬件問題,尤其是用于組裝實現目的的定位設備。在Blender編程接口的環境中,創建了一個新應用程序,該應用程序在實際工作表和計算機中生成的AR元素之間提供了實用的橋梁。fqj






































 工商網監
工商網監
評論