項目在使用STM32L471RE開發,涉及到低功耗的處理。在測試過程中發現同樣的硬件結構(PCB上僅焊接mcu的最小系統),使用LL庫和HAL庫生產的兩個工程運行功耗不一樣,工程配置時鐘為4M 的MSI ,其他外設不配置,生成的工程直接編譯下載。LL庫的運行功耗為740ua、hal庫為650ua
2024-03-21 06:17:42
請問下 cyw920719b2q40evb 如何設置每一個藍牙芯片的mac地址不一樣呢? 謝謝
2024-03-01 06:12:58
隨著物流行業的不斷發展和智能技術的迅速進步,自主移動機器人(AMR)作為智慧物流的引領者正逐漸成為行業的焦點。穩石AMR機器人以其高效的搬運能力、靈活的操作方式和智能的導航系統,為物流行業帶來
2024-02-27 14:10:58 98
98 
用PSoC 41S plus做段碼LCD驅動,感覺驅動波形和datasheet上寫的不一樣。
如下是使用的API:
LCD_Seg_WritePixel(LCD_Seg_PIX0
2024-02-21 06:56:41
求問MCU冷復位和熱復位有什么不一樣?
2024-02-02 15:52:50
市場都是緊缺人才,大家都處于同一起跑線上。那么鴻蒙開發到底與Android有那些不一樣呢?它的技術板塊是怎么樣的?下面分享鴻蒙開發技術分布(略縮版):
高清完整版前往《鴻蒙開發4.0基礎-高階文檔》保存(附鴻蒙4.0文檔)
2024-01-07 22:25:05
電子發燒友網站提供《不一樣的修復螺旋軸承位磨損方法.docx》資料免費下載
2023-12-26 09:53:00 0
0 豈不是手到擒來。
它,就是可以自平衡的賽車機器人——B_ROBOT_100ASK
項目簡介
本項目基于jjrobots的開源項目B-ROBOT EVO2進行復刻,與原開源項目不一樣的地方是,作者將原本
2023-12-26 09:17:46
變速箱已經換了2兩個還是一樣。電源是通過一個接觸器傳送過去的。現在還是一個動作快一個動作慢,電流應該一樣,電壓也穩定,而且電動機的繞線電阻也一樣。
2023-12-21 06:41:15
深圳開鴻數字產業發展有限公司(以下簡稱”深開鴻“)OpenHarmony生態建設能力和在新興行業領域的技術創新實力,也標志著OpenHarmony在新興行業領域又向前邁進了一步。
夸父人形機器人由深開
2023-12-20 09:31:19
ad7175-2連續讀取模式下轉換頻率和軟件設置的不一樣,在dout拉低有數據可以讀取時會給sclk時鐘會有數據讀出,但是下次轉換會延時2us轉換完。如果不讀出數據,dout拉低表示轉換完成的頻率和軟件設置的一樣不會有2us延時。求大神回答我下為啥會有2-3us的延時?
2023-12-14 06:19:17
直流有刷電機,驅動芯片輸入一路PWM,一路IO控制高低電平,為什么這樣設置正反轉速度會不一樣,怎么解決呢?
2023-12-13 09:36:38
您好,想請問一下關于AD7771的使用問題:
我在使用AD7771的SPO端口讀取ADC的輸出值。但是在使用的時候發現我得到的輸出和datasheet上的時序圖不一樣。datasheet上的時序圖說
2023-12-07 07:13:19
自動移液機器人, 全自動移液工作站在生物醫學研究、化學實驗以及臨床診斷等眾多領域,精確且高效的液體處理能力至關重要。而近年來,隨著科技的飛速發展,一種名為“自動移液機器人”的設備應運而生,不僅
2023-12-06 11:21:24
一塊ad9914的開發板,發現它的sync clk電壓是1.8v左右。我想問一下這是芯片之間的差異嗎?為什么同一個管腳輸出電壓還不一樣呢。芯片手冊中,這個管腳電壓也沒有說明,sync clk電壓范圍是什么呢
2023-12-01 06:59:30
在使用AD7718時, 增益(皮加) 的設置針對所有通道的還是可以每一個通道設置為不一樣的增益呢。
2023-12-01 06:35:25
節水智能精準灌溉五通球閥基本介紹田小二?數字球閥Q5是禾大科技自主研發的一種新型灌溉機器人,產品由智能球閥設備和精準灌溉控制系統組成,適用于大田,園林,果園等多種灌
2023-11-30 17:29:08
請教下各位,AD9788內置的 NCO允許用戶設置頻率使AD9788在不同的輸出頻率,那么不同頻率輸出是否插損不一樣?
例如給DAC同樣數字信號時,我們設置DAC輸出為90M時,幅度為-10dBm,當設置NCO輸出為220MHz時,幅度為-13dBm,這是DAC特性引起的嗎?頻率越高,插損越大?
2023-11-27 15:01:05
在拼接屏使用過程中,有時會遇到白底顏色不一樣的問題,這可能會影響到整個顯示畫面的質量和效果。
2023-11-24 10:22:56270 我最近使用的AD8366的時候出現一個很奇怪的現象,我照著AD8366的datasheet上的P20做了個電路,有幾塊電路沒問題,有兩塊出現了AD8366的輸出端的電壓幅度不一樣,后來發現輸出不一樣
2023-11-24 06:06:41
計檢測功率值都是35dBm,但是兩個信號經過AD8310的檢測輸出的電壓卻不一樣
信號1輸出是V1=2.40732V,按照芯片手冊給出的輸入輸出公司計算P1=V1/0.024-95+30
2023-11-20 06:55:59
按照官方提供的除法電路,在multisim上仿真,結果與預期不一樣,求高手解釋
2023-11-17 10:53:47
請教了好多人,都沒有個真正的答案。
同樣的電機,電壓等級、功率等都一樣,為什么電機的勵磁電壓不一樣呢??
2023-11-17 08:28:35
棉田高效節水智能灌溉五通球閥基本介紹田小二?數字球閥Q5是禾大科技自主研發的一種新型灌溉機器人,產品由智能球閥設備和精準灌溉控制系統組成,適用于大田,園林,果園等多
2023-11-03 11:00:31
智慧棉田精準灌溉智能電動三通球閥基本介紹田小二?數字球閥Q3是禾大科技自主研發的一種新型灌溉機器人,產品由智能球閥設備和精準灌溉控制系統組成,適用于大田,園林,果園等多種灌溉場景。產品通過物聯網
2023-11-03 10:56:48
mega328 PWM兩個管腳的參數是一樣的,但是波形卻不一樣
2023-11-03 06:01:29
機器人編程需要什么軟件
2023-11-01 07:34:30
STC89C52的直插封裝和貼片封裝為什么引腳數會不一樣,有什么新的功能嗎
2023-10-25 07:03:15
同一個單片機計時程序,STC12C5410AD單片機型號,每一片單片機計時顯示都不一樣,誤差很大,一分鐘差5S左右,請各位大神幫忙分析一下什么原因啊?晶振復位電容什么的都檢查過了還是一樣結果
2023-10-19 08:18:57
不同芯片的DMA(Direct Memory Access)是不一樣的
2023-10-16 09:14:48693 對U盤的讀取來說,不同的文件管理系統讀取是不一樣的嗎
2023-10-13 08:14:31
智慧農田高效節水智能精準灌溉三通球閥基本介紹田小二?數字球閥Q3是禾大科技自主研發的一種新型灌溉機器人,產品由智能球閥設備和精準灌溉控制系統組成,適用于大田,園林,果園等多種灌溉場景。產品通過物聯網
2023-10-10 11:23:03
沒有L沒有C,除了閂鎖,甚么都不能做吧?!
不一定,PTC與NTC也可充當主震,不過無法震出正弦波來。
閃閃燈及流水燈,早就不是新鮮事物,但是,以燈帶著電路走,那就不一樣了。
2023-09-28 17:25:48
電容容量一樣大小不一樣能用嗎? 電容器(Capacitor)是一種用來存儲電荷能量的電子元件。它是由兩個導體板(一般是金屬)和兩個絕緣介質(一般是電介質)組成的,兩個導體板之間成為電容。電容器可以用
2023-09-22 16:30:192794 解放出來,更有利于人員的合理安排和能力的充分發揮。
產線物流鏈優化
穩石機器人智慧物流解決方案依托微服務架構和合理的資源調配策略,通過WS-CMS(穩石-中央管理系統)+RCS機器人調度控制系統實現實現產線
2023-09-21 13:45:14
的進行監控管理。
智能電話機器人的另一個優勢是不知疲倦,不需要休息和喝水,不需要休息。人在工作時就會有各種各樣的脾氣,但智能電話機器人不會,永遠都以最嚴謹、最周到的態度和客戶進行溝通。
在科技高速發展
2023-09-21 11:09:59
有時候家里面電器中的電容損壞,很多人很難找到一模一樣的來更換,能找到容量一致的電容器就不容易了,電容容量一樣大小不一樣能用嗎?
2023-09-21 09:54:20828 邁步手部康復外骨骼機器人,機器人可以帶動手指完成兩種康復運動——雙向彎曲運動和內收外展運動。機器人可適應不同患者的手指尺寸,外骨骼手的長度可調節,長時間佩戴不會使患者產生疲勞感。手部康復外骨骼機器人
2023-09-20 17:38:02
下肢外骨骼康復機器人BEAR-A1利用仿生學、人體工學、機器人技術,為下肢運動功能障礙者提供康復訓練。通過對患者髖、膝關節提供助力完成康復訓練,可以有效降低治療師工作強度,提高康復訓練效率,提高患者
2023-09-20 17:31:33
邁步機器人BEAR-H系列是用于輔助腦卒中患者步態康復訓練的新型可穿戴式下肢外骨骼機器人。機器人擁有主動被動訓練模式,通過對患者髖、膝、踝關節提供助力完成行走訓練,可以節省人力,并提高康復效果
2023-09-20 17:25:48
機器人,CyberDog2的傳感器數量從11組增加到了19組,除了Intel Realsense D450深度攝像頭、TOF傳感器、GPS模組等,還增加了激光雷達、UWB傳感器等部件來組成新一代的融合感知
2023-09-06 09:39:54
這是XSC3示波器通道A的結果
這是XSC1示波器通道A的結果
同樣線路的電壓為什么不一樣?哪位大佬幫忙看一下,謝謝啦
2023-08-30 16:59:59
;禾大科技智慧農業田間智能灌溉閥門數字球閥基本介紹田小二?數字球閥Q5是禾大科技自主研發的一種新型灌溉機器人,產品由智能球閥設備和精準灌溉控制系統組成,適用于大田
2023-08-22 17:49:58
方案、高防護超耐用結構設計、高效安全人機互動等優勢,可服務于制造控制、設備巡檢、質量監控、消防管控等多個行業場景。
搭載KaihongOS的工業平板
搭載KaihongOS的機器人由深開鴻攜手樂聚
2023-08-17 18:02:10
從波形上看數據以寫回了的,并且在終端也看到了寫回的數據(該數據由程序通過uart傳回),但下載mcu200t上時,收到傳回來的數據卻不一樣。這有沒有可能是板子上的頻率高,而所寫模塊達不到該頻率的原因造成的。
2023-08-16 06:01:00
;禾大科技智慧農業自動化灌溉Q5數字球閥基本介紹田小二?數字球閥Q5是禾大科技自主研發的一種新型灌溉機器人,產品由智能球閥設備和精準灌溉控制系統組成,適用于大田,園
2023-07-28 16:58:39
ICP Programming Tool可以通過項目導出.icp項目文件,為啥相同配置導出的同名icp文件都不一樣,
差別很大,感覺這個icp文件包含icp文件名、導出時間、載入文件數據、配置值,編程方式等等,不知道對不對。
2023-06-14 06:42:34
大科技智慧農業自動化電動蝶閥D2數字電動閥基本介紹田小二?數字電動閥D2是禾大科技自主研發的一種新型灌溉機器人,產品由智能電動閥和精準灌溉控制系統組成,適用于大田,果
2023-05-31 15:29:51
兒童陪護機器人越來越受到人們的關注,其中轉動控制是其重要組成部分之一。步進電機芯片作為一種常用的控制芯片,被廣泛應用于兒童陪護機器人中的轉動控制。本文將從步進電機芯片的工作原理、優勢和應用場景等方面
2023-05-11 15:12:45
共模電感兩邊繞線匝數一樣而電感量不一樣是什么原因?
2023-05-09 11:09:26
最近嘉立創新推出了FPC軟板工藝,大家平時工作學習過程中肯定經常有用到過FPC軟板或者杜邦線進行板與板之間的柔性連接,相信很多人都用過,但不一定自己設計過。那FPC軟板設計和普通的FR-4設計究竟有什么不一樣呢?軟板設計學起來難不難?
2023-04-28 11:37:54956 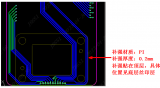
什么原因呢?
為什么仿真的現象和在AT89S52單片機上運行的現象不一樣?我覺的應該不是程序錯了·····是不是單片機里的硬件和仿真的不一樣呢?用的是proteus仿真,求幫忙啊
2023-04-26 15:41:17
為什么用小波去噪一個程序得出的信噪比不一樣呢?
2023-04-25 11:15:18
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-20 10:07:10
產品方向,自由定位。開放友好,操作便捷? 模塊化設計、緊湊型的新一代關節模組,其重量、尺寸、安裝方式、外觀等相對RJS系列作了大幅優化? 為客戶后期生產的關節機器人
2023-04-19 15:23:14
泰科關節機器人具備哪些優勢? 一、編程簡單可以讓無編程經驗的操作人員能快速設置和操作我們的直觀、3D 可視化協作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 15:03:00
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:43:30
深圳泰科智能TA6系列協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 10:58:47
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:53:03
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:48:11
,讓機器人開發更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩定性更好減少機器人開發過程
2023-04-19 10:40:37
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-18 17:35:19
產品優勢專注機器人關節研發,RJS系列關節模組具有定位精度高、性能可靠等特點。 模塊化設計RJS關節模組集成無框電機、驅動器、諧波減速器、編碼器、制動器于一體,結構小巧緊湊,6軸RJS關節
2023-04-18 14:04:34
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 17:40:55
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、科研、教育等多個行業、多場景的自動化需求。
2023-04-17 16:36:37
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 16:25:29
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:40:56
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:31:15
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:25:07
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:15:06
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:02:00
今天小編就為大家介紹一種用于替代人工對設備進行檢查和維護的特種機器人——智能巡檢機器人。機器人大致可分為工業機器人、服務機器人和特種機器人,雖然相較于前兩類機器人而言特種機器人的市場規模最小,但隨著
2023-04-12 15:49:23
左邊紅圈的地方,射極電流大,為什么不接在發射極呢?右邊紅圈的地方,為什么和原電路不一樣,原電路Rc1不是連接了Rb1嗎?為什么三極管后面要反過來?
2023-04-12 14:32:08
反向比例運算放大電路和正向比例運算放大器的虛斷,虛短怎么不一樣?
2023-03-31 14:08:48
在直流電路二極管正向、反向串聯電路中,電阻兩端測出的電壓為什么不一樣?
2023-03-30 11:30:02
光敏電阻光控開關開和關時輸入光強值為什么要不一樣呢?
2023-03-24 17:45:11
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論