并聯機器人和串聯機器人的區別是什么? 并聯機器人和串聯機器人是兩種常見的機器人系統結構,它們在設計和應用上存在著一些明顯的區別。 1. 結構和連接方式: 首先,從結構和連接方式上來比較,并聯機器人
2024-01-26 15:17:29 912
912 協作機器人和工業機器人區別在哪? 協作機器人和工業機器人是現代工業自動化發展中兩個重要的概念。雖然這兩種機器人都是用來提高生產效率和減少勞動力成本的生產工具,但它們在功能、設計和應用方面有著明顯
2024-01-26 14:56:38857 LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
、雷達傳感器等設備的數據,夸父人形機器人能夠更加靈活和高效地完成各種任務。同時,通過KaihongOS的鏈接,夸父人形機器人構建全場景生態,實現在科研教育、特種行業、工業應用、家庭場景、智慧康養等
2023-12-20 09:31:19
工業交換機與工業機器人的通信是現代工業自動化生產中一個重要的組成部分。隨著工業領域的數字化和智能化趨勢不斷加速,工業交換機與工業機器人之間穩定、高效的通信變得愈發重要。本文將圍繞這一主題展開,深入探討工業交換機與工業機器人通信的重要性、應用場景、技術特點及未來發展趨勢。
2023-12-15 09:52:00208 近場和遠場在不同的光學范疇有不同的定義,需要加以區分。下面從菲涅爾數入手,通過菲涅爾數介紹二者的區別。
2023-12-11 09:44:401432 
AD9162和AD9164的主要區別是什么,我看手冊里兩個DAC的描述和封裝管腳是一樣的,但兩者的價格差別很大,請問兩者的主要區別是什么,有沒有二者的對比參數類的描述
2023-12-11 06:44:38
大大提高了工作效率,也極大地提升了實驗精度。自動移液機器人是一種能夠代替人工進行精確液體操作的自動化設備。它通過精密的機械結構和先進的控制系統,實現了對微小液體體積的準
2023-12-06 11:21:24
領域的集大成者,主要應用于機器人控制領域,如AGV工業機器人控制器、智能機械臂控制器、機器人導航系統等。
ROS系統主要特點有哪些
(1) 提供豐富的機器人算法庫機器人的各種控制以及通信離不開算法
2023-11-30 16:01:01
pic單片機做掃地機器人有什么優勢
2023-11-09 07:24:46
兩者那種效果更好,兩者的主要區別是什么
2023-11-07 07:48:20
電子發燒友網站提供《工業機器人在機械加工方面的應用.pdf》資料免費下載
2023-11-03 10:39:56 0
0 機器人編程需要什么軟件
2023-11-01 07:34:30
; 迅為2K0500核心板:作為核心處理器,用于控制和協調工業機器人的運動和操作。工業機器人:選擇適當的工業機器人,包括機械臂、SCARA機器人、
2023-10-26 14:31:20
即可。
以上是EPR6-S工業機器人專用六軸伺服驅動器通過EtherCAT轉profinet(Profinet轉EtherCAT)網關實現了智能PLC伺服器之間的PROFINET通訊。通過該配置
2023-10-24 14:04:48
本文檔的主要內容詳細介紹的是Arduino教學機器人的使用教程
2023-09-27 06:53:26
的運營成本、人力成本還在不斷提高(如:辦公場地的租金、員工的工資、社保公積金、節假日福利等)。
如今的智能電話機器人,每天的電話撥打量可達800-1000通,相比人工提高了3-5倍,大大縮短了名單的篩選
2023-09-21 11:09:59
邁步手部康復外骨骼機器人,機器人可以帶動手指完成兩種康復運動——雙向彎曲運動和內收外展運動。機器人可適應不同患者的手指尺寸,外骨骼手的長度可調節,長時間佩戴不會使患者產生疲勞感。手部康復外骨骼機器人
2023-09-20 17:38:02
下肢外骨骼康復機器人BEAR-A1利用仿生學、人體工學、機器人技術,為下肢運動功能障礙者提供康復訓練。通過對患者髖、膝關節提供助力完成康復訓練,可以有效降低治療師工作強度,提高康復訓練效率,提高患者
2023-09-20 17:31:33
邁步機器人BEAR-H系列是用于輔助腦卒中患者步態康復訓練的新型可穿戴式下肢外骨骼機器人。機器人擁有主動被動訓練模式,通過對患者髖、膝、踝關節提供助力完成行走訓練,可以節省人力,并提高康復效果
2023-09-20 17:25:48
利用 Matlab 建立移動機器人的動力學模型 ,在虛擬現實 (VR )環境下 ,實時仿真移動機器人路徑跟蹤的運動特性 ,為基于 Internet 的機器人遙操作試驗搭建了仿真平臺 。 實驗結果表明
2023-09-20 06:24:09
機械臂是一種由多個關節連接而成的機械結構,類似于人的胳膊。它通常具有可旋轉或可伸縮的關節,使其能夠在空間中執行精確的定位和操作。機械臂通常由電機、傳感器、控制系統和執行器組成。工業機器人是一種自動化
2023-09-19 10:13:12503 
機器學習和深度學習是當今最流行的人工智能(AI)技術之一。這兩種技術都有助于在不需要人類干預的情況下讓計算機自主學習和改進預測模型。本文將探討機器學習和深度學習的概念以及二者之間的區別。
2023-08-28 17:31:09884 有個基于新塘M0516的控制器,需要UART0向一觸摸屏發數據,二者數據是交互的;還要用UART1向另一臺控制器發數據,二者的數據也是交互的。UART0與UART1均配置成普通的模式,只是波特率不同。那么二者之間會有影響嗎?
2023-08-25 07:25:15
產品介紹小安值班機器人是集電力監控系統、動環輔控系統、巡檢機器人“三合一"功能產品,在自學習算法和大數據的加持下,具備強大的AI能力,可實現配電室的數字化及無人值守。 特色功能全感知電力
2023-08-22 14:57:47
設備進行連接。
四、草莓采摘機器人實驗與分析
通過對五次的采摘過程進行記錄統計每個過程的耗時如表2所示,圖像識別的過程的平均時長為0.23s,機械臂移動到目標點并采摘放置的平均時間為6.8s,總時長
2023-08-16 17:35:54
機械臂是一種由多個關節連接而成的機械結構,類似于人的胳膊。它通常具有可旋轉或可伸縮的關節,使其能夠在空間中執行精確的定位和操作。機械臂通常由電機、傳感器、控制系統和執行器組成。工業機器人是一種自動化
2023-08-14 09:51:10496 
請問 Hbird-SDK、Nuclei-SDK和NucleiStudio這三者之間的關系和區別是什么啊?有沒有誰包含誰了?
2023-08-12 08:08:18
協助機器人和工業機器人并沒有嚴格的界限,有些協助機器人可能具備一定的工業機器人功能,而一些工業機器人也可以通過安全措施實現與人類的協同工作。因此,在具體的應用場景中,根據需要和要求,可以選擇適合的機器人來實現自動化任務。
2023-07-20 14:31:45695 MRC3100系列AMR移動機器人控制器,適用潛伏頂升式、協作(復合)式、輥筒式等差速底盤類型移動機器人,內置激光導航及二維碼導航算法,支持差速底盤運動模型。MRC3100系列自帶豐富的I/O資源
2023-07-11 10:12:02
,移動機器人導航技術大致可分為以下幾種:
01激光導航
激光導航分為激光反光板導航與激光自然導航兩種方式:
1、激光自然導航
激光自然導航是一種無需使用反射板的自然導航方式,它不再需要通過輔助導航標志(二
2023-06-28 09:52:41
Lauterbach公司的Trace32-ICD和 Trace32-ICE。
那么二者之間究竟有什么區別和聯系呢?回答這個問題這要從嵌入式系統調試手段的演化說起。
2023-06-19 06:06:54
隨著工業現代化的發展,機器人應用日益廣泛,其作為一種自主執行任務的機械實體被廣泛應用在工業制造領域。噴膠機器人是其中一種經典的機器人類型,其在工業制造加工中有著廣泛的應用,本文將探討噴膠機器人在工業中的應用和特點。
2023-06-08 14:56:58456 
柔性機器人和剛性機器人都是工業機器人的一種,柔性機器人和剛性機器人的主要區別在于它們的結構和使用方式:
2023-06-07 16:16:521892 辨別。
所以,如果你三角函數學得不好,就不要學習機器人了。會很累。而編程的方面的內容并不是很難。大多數邏輯可以用一個if和一個jmp完成。其重點難度大概都是二進制數據的處理。
說簡單點,機器人就是一種
2023-06-06 16:18:33
具有高效、穩定的特點,在兒童陪護機器人領域也得到了廣泛應用。
對于兒童陪護機器人的設計者來說,TB6560AHQ是一種高性能、低噪音的雙路步進電機驅動器芯片。其主要特點包括內置雙路H橋驅動器、最大
2023-05-11 15:12:45
串聯和并聯是電路的二種連接方式,二者之間有很大的區別,但對于初學者來說,并不能輕松將二者區分開來,那么并聯電路和串聯電路的區別是什么,下面一起來了解下。
2023-05-02 16:48:004435 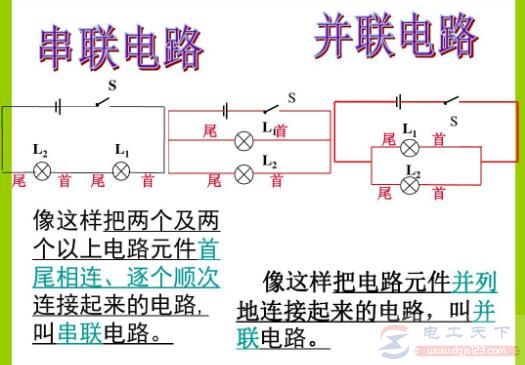
柔性機器人和剛性機器人都是機器人技術的一種,但二者的設計和應用有很大的區別。
1. 結構設計: 就結構而言,剛性機器人一般采用關節連桿的設計結構,機器臂由多個關節構成,可進行多自由度的運動
2023-04-25 15:37:532436 定位, 且轉動慣性小,動態響應快。主要應用包括自動化生產線,機器人關節,機器人關節、醫醫療儀器及設備、精密儀器和工業控制系統,以及其他許多的應用。
2023-04-20 10:07:10
平板電腦上的下箭頭鍵即可。 二、安裝快捷泰科對協作式機器人的設置進行了變革,對于未經訓練的操作員而言,從開箱到取出協作式機器人、安裝機器人、到首次簡單作
2023-04-19 15:13:28
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 15:03:00
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:43:30
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:39:15
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:29:30
深圳泰科智能TA6系列協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 10:58:47
工業機器人技術 工業機器人是廣泛用于工業領域的多關節機械手或多自由度的機器裝置,具有一定的自動性,可依靠自身的動力能源和控制能力實現各種工業加工制造功能。工業機器人被廣泛應用于電子、物流、化工等各個
2023-04-19 10:54:061374 RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:53:03
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:48:11
,讓機器人開發更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩定性更好減少機器人開發過程
2023-04-19 10:40:37
TB6-R3協作機器人是一款靈活的小型工業協作機器人,其精巧的機械結構設計,外形緊湊,能夠適應狹小的工作空間,及高精密的工作任務需求;這款協作機器人自重僅為11.5KG,有效負載為3KG,工作半徑達666mm,是輕型裝配和高精度控制的理想選擇。
2023-04-19 10:18:50
深圳泰科智能機器人TB6-R3協作機器人是一款靈活的小型工業協作機器人,其精巧的機械結構設計,外形緊湊,能夠適應狹小的工作空間,及高精密的工作任務需求;這款協作機器人自重僅為11.5KG,有效負載為3KG,工作半徑達666mm,是輕型裝配和高精度控制的理想選擇。
2023-04-19 10:13:59
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-19 10:05:39
TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、航天、科研、教育等多個行業、多場景的自動化需求。
2023-04-19 09:38:36
TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作機器人功能強大、高自重負載比、高可靠性、模塊化關節設計,易于末端擴展外部設備,可以實現快速安裝部署。
2023-04-19 09:27:59
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、科研、教育等多個行業、多場景的自動化需求。-
2023-04-19 09:22:29
TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產應用需求。模塊化
2023-04-19 09:16:32
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 08:48:46
定位, 且轉動慣性小,動態響應快。主要應用包括自動化生產線,機器人關節,機器人關節、醫醫療儀器及設備、精密儀器和工業控制系統,以及其他許多的應用。
2023-04-18 17:35:19
產品優勢專注機器人關節研發,RJS系列關節模組具有定位精度高、性能可靠等特點。 模塊化設計RJS關節模組集成無框電機、驅動器、諧波減速器、編碼器、制動器于一體,結構小巧緊湊,6軸RJS關節
2023-04-18 14:04:34
,讓機器人開發更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩定性更好減少機器人開發過程
2023-04-17 18:01:33
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:57:19
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 17:40:55
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、科研、教育等多個行業、多場景的自動化需求。
2023-04-17 16:36:37
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 16:25:29
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 16:12:03
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:57:13
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:40:56
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:31:15
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:25:07
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:15:06
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:07:26
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:02:00
口上面,當機器人開始加水時,傳感器會檢測水位并將數據發送到一個微處理器。微處理器會根據清水箱的容量,來判斷是否需要再次填充水。如果水位已滿,機器人將停止加水。污水箱中也有水位傳感器,但這個傳感器測量
2023-04-15 11:21:46
今天小編就為大家介紹一種用于替代人工對設備進行檢查和維護的特種機器人——智能巡檢機器人。機器人大致可分為工業機器人、服務機器人和特種機器人,雖然相較于前兩類機器人而言特種機器人的市場規模最小,但隨著
2023-04-12 15:49:23
我不明白 mCAN、msCAN 和 FlexCAN 之間的區別是什么,或者為什么存在這么多不同版本的 can 外設。 是否有關于每個產品的文檔?
2023-03-29 08:19:06
技術參數是不同工業機器人之間差距的直接表現形式,不同的機器人技術參數特點不同,對應了它們不同的應用范圍,工業機器人是高精密的現代機械設備,參數眾多,企業挑選工業機器人的時候應該著重注意哪些參數呢?下面就跟著小編一起看看工業機器人值得關注的7大技術參數。
2023-03-24 10:17:24706
 電子發燒友App
電子發燒友App





















 工商網監
工商網監
評論