其性能,確保生產(chǎn)過程的穩(wěn)定性和可靠性。ZR執(zhí)行器廠家將深入探討影響ZR執(zhí)行器性能的關(guān)鍵因素,旨在幫助讀者更好地應(yīng)對這些挑戰(zhàn)。 1、我們應(yīng)關(guān)注ZR執(zhí)行器的機械部分。機械部分的設(shè)計和制造質(zhì)量對執(zhí)行器的性能具有決定性影響。高精度、耐磨和
2024-03-20 15:04:38 72
72 
ZR執(zhí)行器的抗干擾能力:穩(wěn)定運行的關(guān)鍵-速程精密 在工業(yè)自動化領(lǐng)域,ZR執(zhí)行器作為一種重要的終端設(shè)備,其性能的穩(wěn)定性對于整個自動化系統(tǒng)的運行至關(guān)重要。而抗干擾能力作為ZR執(zhí)行器穩(wěn)定運行的關(guān)鍵因素之一
2024-03-15 18:00:12137 
因為這類設(shè)備的執(zhí)行機構(gòu)相對位移較大;或者傳動結(jié)構(gòu)復(fù)雜,機械、電氣、液壓等各環(huán)節(jié)稍有不到位就會產(chǎn)生誤差或故障。
2024-03-14 13:47:4182 
各位大佬好,想問下是否靠譜的FPGA的培訓(xùn)機構(gòu)推薦的?
2024-02-28 15:02:59
隨著電動汽車的發(fā)展,充電樁也成為當(dāng)下的一個很熱門的工業(yè)產(chǎn)品。我們初步接觸充電樁,有了點滴的感受。
先簡單說說容易一點的交流充電樁。就是通過市電(220V,50赫茲)給電動汽車提供充電的能源來源。很
2024-02-27 14:33:11
? 在數(shù)字化轉(zhuǎn)型的浪潮中,企業(yè)網(wǎng)絡(luò)需求日益復(fù)雜化,尤其是對于大規(guī)模的集團機構(gòu)來說,高效、安全且可靠的網(wǎng)絡(luò)連接成為了業(yè)務(wù)發(fā)展的關(guān)鍵。傳統(tǒng)網(wǎng)絡(luò)架構(gòu)已難以滿足這些需求,而SD-WAN(軟件定義廣域網(wǎng))技術(shù)
2024-02-27 10:58:05107 目前國家層面給出的答案是:截至2024年,國家層面還是認可達到一定電池續(xù)航里程的增程式電動車是新能源電動車,可以上綠牌!
2024-02-23 11:38:54590 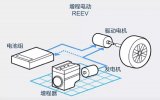
伺服電機主要由伺服驅(qū)動器、電動機和其他相關(guān)部件組成。伺服馬達用來提供動力,而伺服控制器則負責(zé)調(diào)整輸出速度和位置,并將其轉(zhuǎn)化為電信號發(fā)送給執(zhí)行機構(gòu)。
2024-02-22 11:26:35148 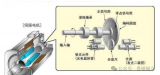
的需求。本文將詳細介紹調(diào)功器的工作原理、應(yīng)用場景以及在電動汽車充電設(shè)備中的作用。 首先,我們來了解一下調(diào)功器的工作原理。調(diào)功器采用電力電子技術(shù),通過高頻開關(guān)管的控制,改變電源波形的形態(tài)和大小,從而實現(xiàn)電能的調(diào)節(jié)。
2024-02-03 09:57:462392 步進電機是一種將電脈沖信號轉(zhuǎn)化為角位移或線位移的步進運動執(zhí)行機構(gòu),用來實現(xiàn)連續(xù)的、穩(wěn)定的、高精度的步進運動。
2024-01-16 18:08:17582 漏電電流達到動作電流時,觸、漏電保護器的操作執(zhí)行機構(gòu)就會動作,這樣使流過人體的電流很小,控制在30mA以內(nèi),保護了觸電者的人身
安全,并且可以達到不斷電的效果。假如現(xiàn)在又有人在同相觸電的話,也能保護觸電
2024-01-11 16:33:00
電子發(fā)燒友網(wǎng)站提供《電動汽車驅(qū)動用電機的選擇設(shè)計.pdf》資料免費下載
2024-01-10 11:13:36 0
0 隨著電動車的普及,如何為其提供穩(wěn)定、高效的充電解決方案成為了許多車主關(guān)心的問題。為此,我們推出了一款12-80V降壓5V/2A DC-DC恒壓電動車USB充電IC,為您的出行充電提供便利。這款充電
2023-12-21 15:27:51
;
第二條生產(chǎn)線是2006年生產(chǎn)的,電機勵磁主要采用電流控制:
兩者的總體控制模式相同,同步系數(shù)等個別參數(shù)有細微的差別,基本都能正常運轉(zhuǎn),但相對來說,前者在張力控制方面相對較穩(wěn)定些。
2023-12-14 07:14:29
滾珠絲桿是操縱機構(gòu)中的重要組成部分,可以傳遞較高的扭矩,并且具有低摩擦、高效率和快速響應(yīng)的特性,這使得操縱機構(gòu)能夠?qū)崿F(xiàn)高速、高精度的運動控制,這對于整個系統(tǒng)的性能和精度具有決定性的影響,保持操縱機構(gòu)絲桿的精度是確保整個系統(tǒng)正常運行的關(guān)鍵
2023-12-04 17:45:00194 
的機器人維護,上層控制器部分與底層執(zhí)行機構(gòu)部分采用模塊化設(shè)計,執(zhí)行機構(gòu)部分采用STM32作為底層處理器,主要控制機器人底層電機的驅(qū)動。針對環(huán)境感知系統(tǒng)中存在的導(dǎo)航、傳感器數(shù)據(jù)復(fù)雜和信息量較大等問題,上層
2023-12-02 15:52:53
目前,對增程式電動車的定義有些模糊,在世界范圍內(nèi)尚沒有一個嚴格的定義。如圖一所示,我把我們國家以及美國對增程式電動車的定義及六個關(guān)鍵詞列了出來:電動汽車、純電續(xù)航里程、延長續(xù)航里程、輔助電動力單元
2023-12-01 09:55:45812 
在Python中,可以使用一些技術(shù)來確保程序執(zhí)行完畢后再執(zhí)行其他任務(wù)。下面將詳細介紹幾種方法。 一、使用阻塞方式執(zhí)行程序 阻塞方式是最簡單的方法之一,它要求程序在執(zhí)行完畢后再執(zhí)行后續(xù)任務(wù)。可以通過
2023-11-29 15:09:17999 ,單片機也是有CPU的,它負責(zé)執(zhí)行代碼,運算數(shù)據(jù),以及發(fā)出控制信號等功能,而與CPU直接相連的設(shè)備我們稱之為外設(shè)(就是集成芯片)。 本文以 STM32F103ZET6 為例來講解,該芯片使用的是ARM架構(gòu),該架構(gòu)采用的是哈弗結(jié)構(gòu)。 哈弗結(jié)構(gòu):內(nèi)存和外設(shè)統(tǒng)一編址。 ARM芯
2023-11-24 15:45:44751 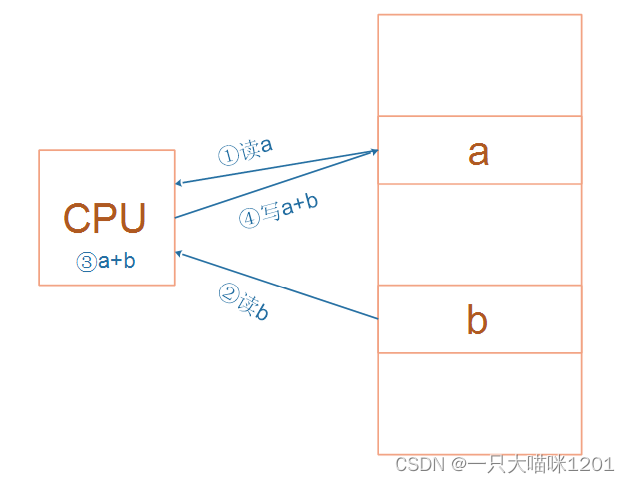
,都是從本身工廠需求出發(fā),但是如何建立更高效的、更簡潔的、更有擴展性的工廠執(zhí)行層面的信息系統(tǒng),沒有理論基礎(chǔ)是不可實現(xiàn)的。 站在巨人的肩膀上,登高望遠。
2023-11-24 12:22:41455 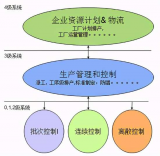
我們在 肖特基二極管 設(shè)計過程中,肖特基二極管與普通二極管有什么區(qū)別,有哪些參數(shù)與特點我們需要留意。本文分享那些電感容易忽略關(guān)鍵參數(shù)。 01 什么是 肖特基二極管 肖特基二極管 即熱載流子二極管
2023-11-16 16:10:01322 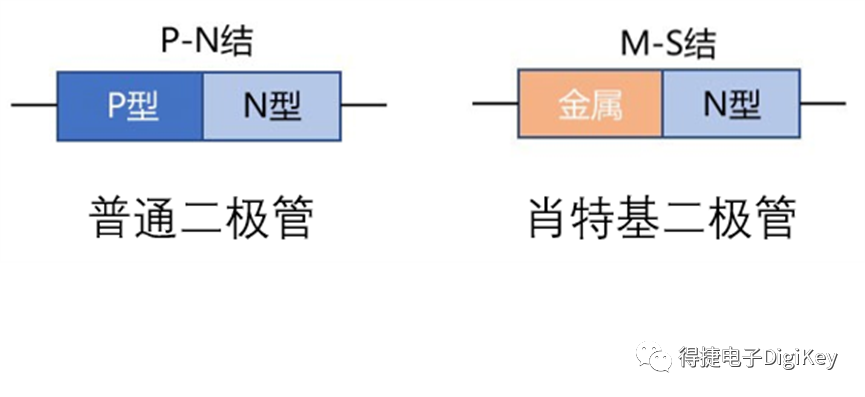
為了增強邊緣智能,機電執(zhí)行器需要智能和高度集成的驅(qū)動器解決方案。這些智能邊緣設(shè)備融合了執(zhí)行器和傳感器功能,支持在機器層面更好地進行實時決策,并向更高的控制層級、云或AI生產(chǎn)力解決方案提供原位反饋信息。本文討論了模擬和數(shù)字技術(shù)交匯之處——智能邊緣的智能驅(qū)動器解決方案和技術(shù)。
2023-11-16 15:56:39440 如果hmc960采用電能聯(lián)結(jié),CMI和CMO偏向必須連接起來嗎?
謝謝!
2023-11-15 06:21:28
像mdk可以在整個工程中搜索關(guān)鍵字
IAR應(yīng)該也有類似的功能吧,但是我貌似沒有找到
2023-11-08 07:21:59
電磁式繼電器一般由3個基本部分組成:檢測機構(gòu)、中間機構(gòu)和執(zhí)行機構(gòu)。
2023-11-03 16:04:37533 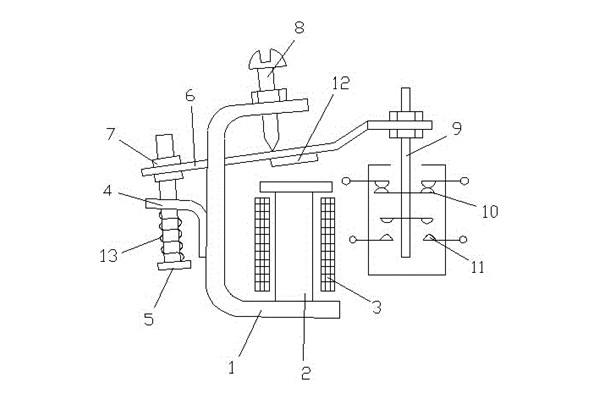
UPS在切換的時候都采用什么方式,對于一般的用電器有什么影響,一般都是怎么處理的
2023-11-01 06:42:30
AMAZINGIC晶焱科技提供電動車ESD/EOS防護關(guān)鍵布局方案應(yīng)用
2023-10-31 16:16:16315 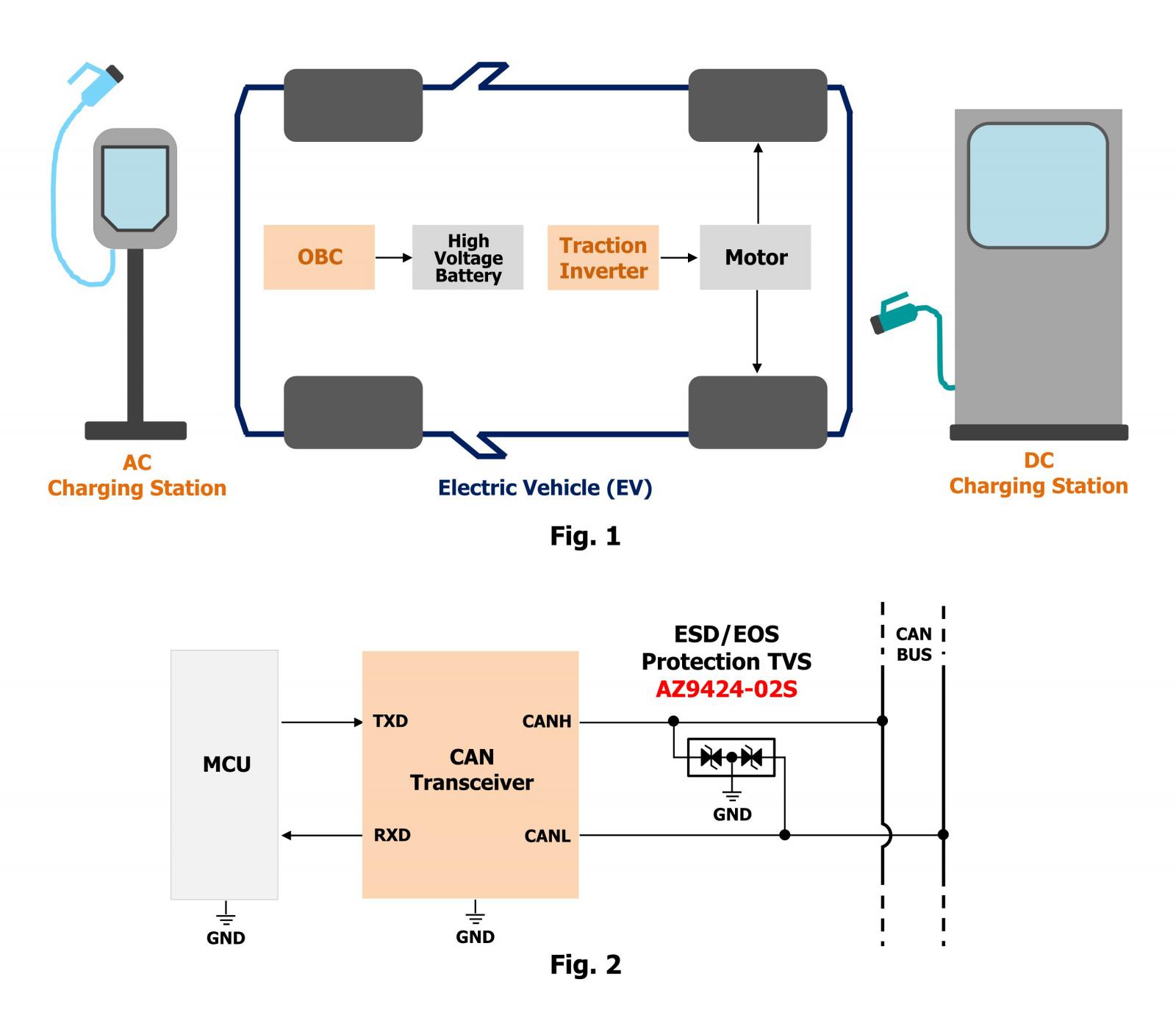
看門狗Watch Dog 軟件層面怎么實現(xiàn)
2023-10-31 06:19:13
執(zhí)行機構(gòu)是驅(qū)動終端控制單元(閥門,檔板等)的專用設(shè)備,廣泛應(yīng)用于電力、冶金、石油、化工、建材、城市供水、污水處理等行業(yè)
2023-10-30 15:12:360 近日,中國質(zhì)量認證中心發(fā)布了關(guān)于008家用電器、009商用機械等產(chǎn)品認證執(zhí)行新版標(biāo)準(zhǔn)和實施規(guī)則的通知,詳情如下
2023-10-28 16:05:05441 
工業(yè)機器人通常由執(zhí)行機構(gòu)、驅(qū)動系統(tǒng)、控制系統(tǒng)和傳感系統(tǒng)四部分組成,如下圖所示。
2023-10-25 09:28:461833 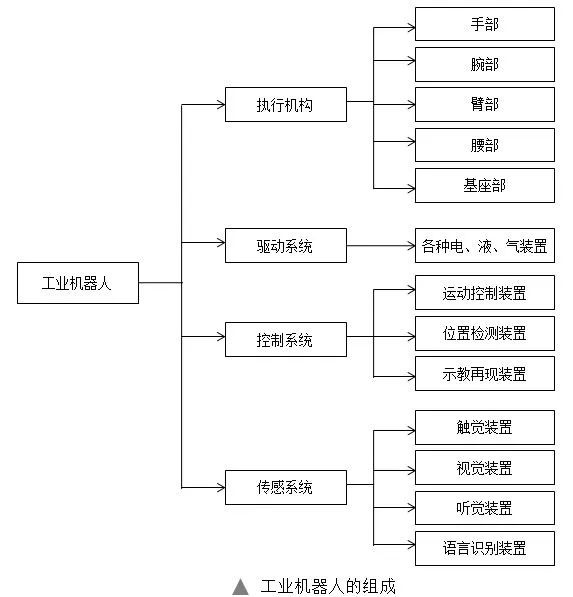
對于定制差分晶振應(yīng)用電路方案定制細節(jié)方面要和開發(fā)公司一起協(xié)商,因為在定制的過程中應(yīng)該確定企業(yè)的需求。尤其是差分晶振應(yīng)用電路方案也是執(zhí)行方案的,目前在執(zhí)行的時候有能力的企業(yè)可以自己執(zhí)行差分晶振應(yīng)用電路方案
2023-10-24 18:03:58433 
MEMS是Micro Electro Mechanical Systems(微機電系統(tǒng))的縮寫,具有微小的立體結(jié)構(gòu)(三維結(jié)構(gòu)),是處理各種輸入、輸出信號的系統(tǒng)的統(tǒng)稱。
是利用微細加工技術(shù),將機械零零件、電子電路、傳感器、執(zhí)行機構(gòu)集成在一塊電路板上的高附加值元件。
2023-10-18 09:46:22124 
電子發(fā)燒友網(wǎng)站提供《基于P89C58的智能電動執(zhí)行器的設(shè)計.pdf》資料免費下載
2023-10-10 10:57:211 二總線技術(shù)為什么下行
采用電壓信號,上行
采用電流信號?是什么傳輸?shù)?/div>
2023-10-08 08:37:35
步進電機是一種將電脈沖信號轉(zhuǎn)換為電動機旋轉(zhuǎn)角度的執(zhí)行機構(gòu)。當(dāng)步進驅(qū)動器接收到一個脈沖,就驅(qū)動步進電動機按照設(shè)定的方向旋轉(zhuǎn)一個固定的角度(稱為步距角)。
2023-10-07 17:05:42270 
步進電機是一種將電脈沖信號轉(zhuǎn)換為電動機旋轉(zhuǎn)角度的執(zhí)行機構(gòu)。當(dāng)步進驅(qū)動器接收到一個脈沖,就驅(qū)動步進電動機按照設(shè)定的方向旋轉(zhuǎn)一個固定的角度(稱為步距角)。
2023-10-07 10:01:58280 
安躍強 江蘇安科瑞微電網(wǎng)研究院有限公司江蘇江陰 摘 要: 發(fā)電廠低壓廠用電系統(tǒng)使用的通常為380V系統(tǒng)供電,隨著社會發(fā)展發(fā)電機組容量持續(xù)增加,使得原有的單一工作段配電方式逐漸轉(zhuǎn)換成為電動機動力中心
2023-09-27 15:09:07250 制動有很大的實際意義。本設(shè)計主要設(shè)計他勵直流電動機的能耗制動過程,(包括迅速停機過程和下放重物過程),采用圖解法和公式法兩種方法結(jié)合既直觀又嚴謹?shù)拿枋鏊麆钪绷?b class="flag-6" style="color: red">電動機的能耗制動過程。其中包括對制動電阻的選擇等,以便能耗制動更順利的進行,讓我們更加了解能耗制動的全過程。
2023-09-26 07:10:27
【例2】步進電機是一種將電脈沖信號轉(zhuǎn)換為電動機旋轉(zhuǎn)角度的執(zhí)行機構(gòu)。當(dāng)步進驅(qū)動器接收到一個脈沖,就驅(qū)動步進電動機按照設(shè)定的方向旋轉(zhuǎn)一個固定的角度(稱為步距角)。因此步進電機是按照固定的角度一步一步轉(zhuǎn)動
2023-09-25 09:15:02525 
采用H_PWM_L_ON模式的無刷電機驅(qū)動方案。采用定時器拖動電機時,檢測到的反電動勢如圖所示,有友友能幫忙看一下嗎?
2023-09-22 19:52:34
在編寫了大量代碼之后,不禁讓人思考,計算機究竟是如何理解并執(zhí)行我們所寫的代碼的呢?這個問題將引導(dǎo)我們深入了解計算機的內(nèi)部工作原理,從二進制到邏輯電路,再到運算器和控制器的協(xié)同工作,探究計算機是如何執(zhí)行代碼的。
2023-09-05 09:54:29268 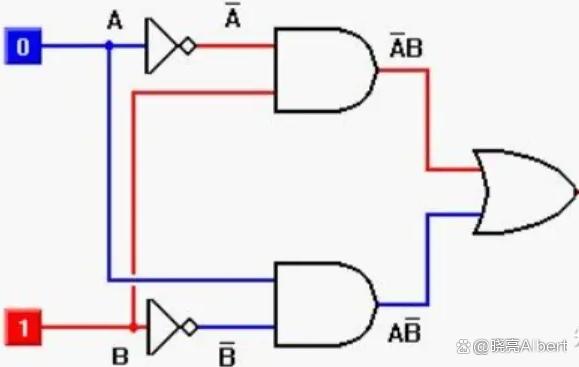
有人說,用電壓表直接接在電源兩端,電壓表的示數(shù)不就是電動勢的讀數(shù)了?如圖所示。我只能說,你可能沒有想深入。
2023-09-04 14:56:00363 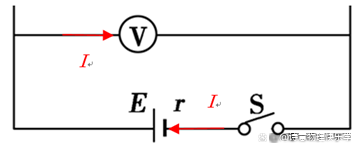
雜亂環(huán)境及有害環(huán)境下操作以維護人身,因而碼垛機器人在許多范疇都有著廣使用。因而碼垛機器人定要取代人力勞作。 全自動碼垛機器人主要由機械主體、伺服驅(qū)動系統(tǒng)、手臂機構(gòu)、末端執(zhí)行器(抓手)、末端執(zhí)行器調(diào)節(jié)機構(gòu)以及檢測機構(gòu)
2023-08-29 14:33:05472
應(yīng)用程序: 本樣本代碼使用機器學(xué)習(xí)來在 M480 上執(zhí)行關(guān)鍵字識別。
BSP 版本: M480系列 BSP CMSIS V3.04.000
硬件: NuMaker-PFM-M487 VER 3.0
2023-08-29 06:46:22
新唐很多mcu可以在spi flash上直接尋址,執(zhí)行代碼,很多自帶內(nèi)部spi flash作為代碼存儲器,這樣雖然可以降低成本,但代碼在spi flash上執(zhí)行是極其慢的,一些關(guān)鍵函數(shù)必須得定向到
2023-08-24 07:21:51
應(yīng)用程序: 本樣本代碼使用機器學(xué)習(xí)來在 M480 上執(zhí)行關(guān)鍵字識別。
BSP 版本: M480系列 BSP CMSIS V3.04.000
硬件: NuMaker-PFM-M487 VER 3.0
2023-08-22 08:02:00
這是我們實際上SQL執(zhí)行順序:
我們先執(zhí)行from,join來確定表之間的連接關(guān)系,得到初步的數(shù)據(jù)
where對數(shù)據(jù)進行普通的初步的篩選
2023-08-18 12:37:26475 
無錫金紅鷹工業(yè)自動化有限公司(www.jhyrobot.com)是一家設(shè)計生產(chǎn)工業(yè)機器人及提供機器人工業(yè)自動化系統(tǒng)解決方案的高新技術(shù)企業(yè)。如果您對焊接機器人感興趣,可以聯(lián)系無錫金紅鷹,我們是專業(yè)的工業(yè)機器人集成商,提供機器人系統(tǒng)設(shè)計、生產(chǎn)、銷售及售后一站式服務(wù)(劉經(jīng)理:13812058068)。
2023-08-17 16:37:51308 
輪轂電機的研發(fā)、產(chǎn)業(yè)化和整車應(yīng)用為全球技術(shù)競爭的焦點和研究熱點。十三五和十四五期間,國家“新能源汽車”試點專項持續(xù)推動輪轂電機相關(guān)課題的研究,如2017年分布式純電動轎車底盤開發(fā)(重大共性關(guān)鍵
2023-08-17 10:01:39387 
學(xué)識淵博的人你好,我們在編寫軟件程序的時候出現(xiàn)的一些問題。在仿真執(zhí)行自定義custom指令時,只能執(zhí)行軟件程序中所調(diào)用第一條,而后在仿真中會退出該指令無限進入idle狀態(tài)不能進行下一條軟件所調(diào)用指令
2023-08-16 07:07:57
減速機是連接動力源與執(zhí)行機構(gòu)之間的傳動機構(gòu),能將馬達的轉(zhuǎn)速降低,并讓轉(zhuǎn)矩提升。其將電動機、內(nèi)燃機等高速運轉(zhuǎn)的動力,透過輸入軸上的小齒輪嚙合后,再輸出至軸上的大齒輪以達到減速的目的,并藉此傳遞更大的力矩。
2023-07-26 12:25:481947 單元ECU,執(zhí)行器(電磁閥,執(zhí)行電機)和執(zhí)行機構(gòu)等。 其工作原理是: ECU先通過采集這些傳感器信號和與其他ECU進行通訊,收發(fā)一些信號; ECU再使用復(fù)雜的控制邏輯算法,計算得到執(zhí)行器的控制指令; 執(zhí)行器最后驅(qū)動執(zhí)行機構(gòu),操控發(fā)動機機械部
2023-07-26 10:34:05522 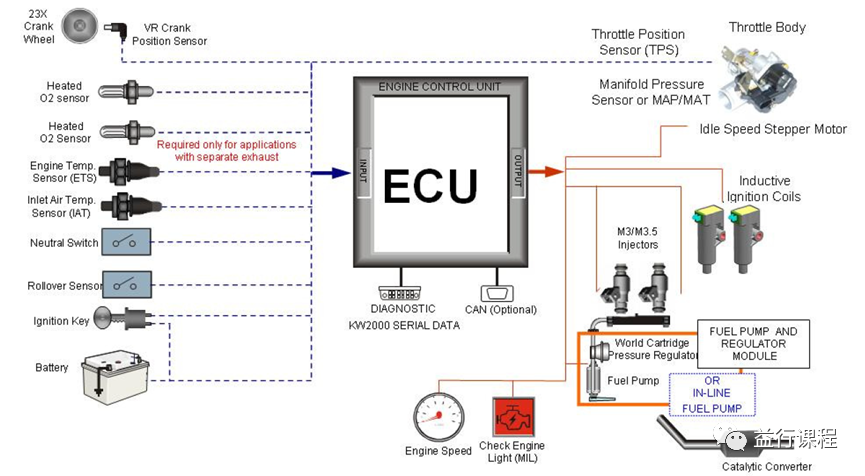
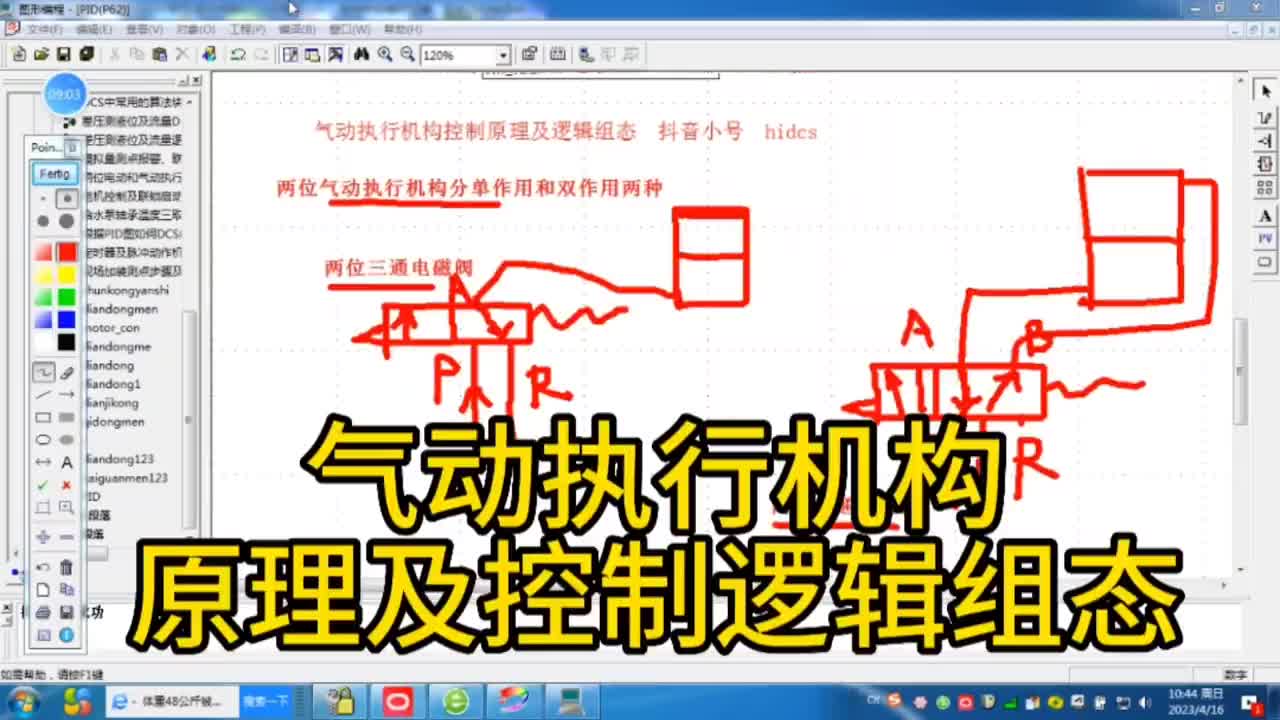
為了實現(xiàn)某些特殊的控制功能,一些執(zhí)行機構(gòu)上還配備了其他的控制部件,如實現(xiàn)連鎖功能的電磁閥,實現(xiàn)保位功能的鎖氣器,加快動作速度的氣放大器,失氣時維持短時間的儲能罐等等。
2023-07-21 14:37:09991 多電、全電到電動飛機技術(shù)是一個逐步發(fā)展的過程,從多電到全電是飛機二次能源電能量逐漸增大的過程,到電力混合和電動飛機將是飛機的一次能源逐步用電能來實現(xiàn)的過程。而電動飛機技術(shù)發(fā)展的核心是電力推進技術(shù)。
2023-07-14 09:56:271080 接地電極固定、高壓電極可以電動驅(qū)動向左右移動。1.3電動機構(gòu)采用按鍵和無線遙控兩種方式控制,同時還有微調(diào)控制,便于精確調(diào)整距離。1.4測試支架具有標(biāo)尺刻度,調(diào)節(jié)距
2023-06-29 09:18:54
為了保證伺服電動機及步進電動機等控制用電動機的優(yōu)異控制性能,組裝到電動機中的減速機要求具備高轉(zhuǎn)矩/質(zhì)量比、強大的角度傳動精度、低齒隙等特性。組裝有Harmonic Drive的執(zhí)行元件憑借其優(yōu)異性能,在不破壞電動機控制性能的情況下能夠獲得高減速以及高分辨率。
2023-06-28 12:00:00389 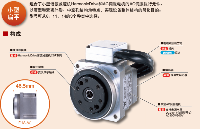
電動自行車整車性能測試儀(配底部測功機)圖片僅供參考一、產(chǎn)品概述:本試驗機使用電動自行車整車的制動性能測試,可以進行干濕狀態(tài)下的制動試驗、極限速度測試、騎行距離等檢測。采用電腦控制,可以用微形打印機
2023-06-21 14:17:20
電動自行車整車性能測試儀(不配測功機)圖片僅供參考一、產(chǎn)品概述:本試驗機使用電動自行車整車的制動性能測試,可以進行干濕狀態(tài)下的制動試驗、極限速度測試、騎行距離等檢測。采用電腦控制,可以用微形打印機
2023-06-21 14:15:11
機器人是具有一定自主能力、可執(zhí)行預(yù)期任務(wù)的執(zhí)行機構(gòu)。不同研究機構(gòu)對機器人定義有所差異,整體而言,機器人應(yīng)具有自主能力,是 可在其環(huán)境內(nèi)運動以執(zhí)行預(yù)期任務(wù)的可編程執(zhí)行機構(gòu)。
2023-06-21 10:50:41775 
關(guān)于電動汽車市場,我們知道有兩件事是真實的:汽車制造商希望推廣電動汽車,而消費者則擔(dān)心續(xù)航里程。現(xiàn)在,正如Electrek最先報道的那樣,福特已經(jīng)為一種可以在車頂行駛的備用電池組申請了一項創(chuàng)新專利。
2023-06-20 09:54:52287 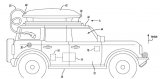
在機器人機電控制系統(tǒng)中,舵機控制效果是性能的重要影響因素。舵機可以在微機電系統(tǒng)和航模中作為基本的輸出執(zhí)行機構(gòu),其簡單的控制和輸出使得單片機系統(tǒng)非常容易與之接口。
舵機是一種位置(角度)伺服的驅(qū)動器
2023-06-20 07:46:30
會遇到手機或其他電子設(shè)備需要應(yīng)急充電的情況,此時我們可以利用電動車手機充電器解決這一問題,即插即用、充電快速。本文介紹的是電動車USB手機充電器供電應(yīng)用方案。惠海半導(dǎo)
2023-06-16 10:07:23
碼垛機器人 碼垛機廣泛運用在工廠中,其通過將貨物整齊的碼放或轉(zhuǎn)移,有校題高了生產(chǎn)和運輸?shù)男省榱耸勾a垛機發(fā)揮出特定的作用,現(xiàn)碼垛機的執(zhí)行機構(gòu)都是根據(jù)產(chǎn)品的外形及相應(yīng)行業(yè)碼垛特點來設(shè)置的,因此
2023-06-06 11:51:09483 
充分理解所有執(zhí)行機構(gòu)包括變頻器,伺服電機,步進電機,液壓,氣動,等機構(gòu)的原理和為什么使用。
2023-06-05 14:15:362638 控制閥的定義是什么 控制閥(Control valve)由兩個主要的組合件構(gòu)成:閥體組合件和執(zhí)行機構(gòu)組合件(或執(zhí)行機構(gòu)系統(tǒng)),液壓閥是用來控制液壓系統(tǒng)中油液的流動方向或調(diào)節(jié)其流量和壓力的,方向控制閥
2023-06-02 14:12:14844 ,以將我的應(yīng)用程序?qū)懭雰?nèi)部閃存。我可以在 RT 系列上做同樣的事情嗎?因為我看到ROM里有flash loader是不能改的,請問怎么改?我是否需要在外部閃存中構(gòu)建自己的引導(dǎo)加載程序,然后加載我的應(yīng)用程序?
5) RT 1050/1060/1064 在硬件層面可以互換嗎?我需要改變什么?
2023-05-19 12:43:49
視覺檢測系統(tǒng)主要由光源、相機、計算機、執(zhí)行機構(gòu)等部分組合而成[2],如圖 2 所示。其工作原理是: 照明光源發(fā)出平行光照射在檢測工件上,工業(yè)相機采集圖像,將光信號轉(zhuǎn)換成圖像數(shù)據(jù)傳送給計算機,由計算機完成圖像處理、分析和計算等,并將處理結(jié)果以信號的形式發(fā)送給執(zhí)行機構(gòu),指導(dǎo)機器的運行。
2023-05-16 09:46:04254 
運動控制系統(tǒng)多種多樣,但從基本結(jié)構(gòu)上看,一個典型的現(xiàn)代運動控制系統(tǒng)的硬件主要由:上位機、運動控制器、功率驅(qū)動裝置、電動機、執(zhí)行機構(gòu)和傳感器反饋檢測裝置等部分組成。
2023-05-10 11:46:211048 
目前世界各地在爭相將燃油汽車替換為電動汽車,預(yù)計電動汽車的普及率將迅速攀升。與目前部署的充電樁數(shù)量相比,預(yù)計電動車 (EV) 的迅速采用將會對可用的充電樁數(shù)量帶來重大改變。在本文中,我們將研究電動車采用率的增加將對配電基礎(chǔ)設(shè)施提出怎樣的要求,以及在規(guī)劃電動車充電基礎(chǔ)設(shè)施時必須考慮的一些因素。
2023-05-08 10:29:03326 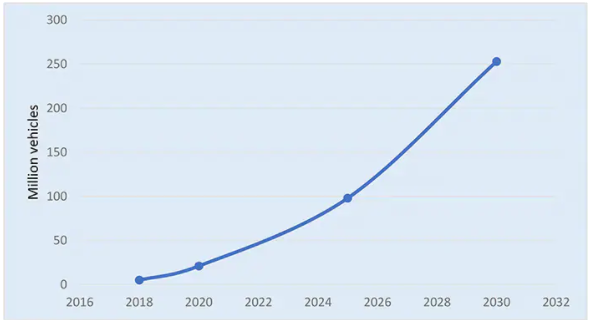
步進電機是一種用電脈沖進行控制,將電脈沖(數(shù)字信號)轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。
2023-05-05 10:45:161946 
當(dāng)我們考慮電機和使用電機的地方時,我們最常想到的是汽車和其他類似的交通方式,如電動摩托車、電動自行車和電動滑板車。但我們并不總是記得電機存在于日常家居用品中,例如吸塵器、電動工具和家用電器。我們的數(shù)字信號控制器 (DSC) 解決方案專注于家用電器、汽車、消費電子和工業(yè)控制的四個主要電機控制市場。
2023-04-21 09:44:33754 主體 - 即機座和執(zhí)行機構(gòu),包括臂部、腕部和手部,有的機器人還有行走機構(gòu)。大多數(shù)工業(yè)機器人有3-6個運動自由度,其中腕部通常有1-3個運動自由度;
2023-04-20 12:41:35489 ,電動汽車充電裝置所包含的 PFC整流電路、隔離型DC-DC 均依賴于電力電子技術(shù)實現(xiàn)。四、軍工領(lǐng)域軍工領(lǐng)域中,電力電子技術(shù)在各類軍工電源以及軍工電子裝置中有著至關(guān)重要的地位。如雷達發(fā)射機采用的高壓開關(guān)電源
2023-04-19 10:53:41
單向運轉(zhuǎn)的電動機變成點運動狀態(tài),可能是電路哪里出現(xiàn)故障了?
2023-04-07 11:54:36
,各地政府監(jiān)管機構(gòu)和消防人員一直在積極宣傳安全知識,甚至輪番出臺政策規(guī)定,強調(diào)電動車進電梯的危害,但是電動車進電梯的現(xiàn)象依然屢禁不止,比如,很多車主為了便利,習(xí)慣性將電動車停在住宅樓梯間等公共區(qū)域內(nèi)
2023-04-04 15:49:28
萬能試驗機的原理圖是由不同的部分組成的,包括負載傳感器、控制器、執(zhí)行機構(gòu)、以及數(shù)據(jù)采集系統(tǒng)。負載傳感器可以測量試件所受的壓力或拉力,控制器可以控制試驗過程,執(zhí)行機構(gòu)可以施加力或變形到試件上,數(shù)據(jù)采集系統(tǒng)可以記錄試驗結(jié)果。
2023-04-04 14:01:59313 
在變頻器V/F控制中,為什么我們不采用PAM調(diào)制方式? 想要知道為什么變頻器V/F控制中,不采用PAM調(diào)制方式,首先對于PAM的控制要有一定的了解,這樣才能知道利弊在哪,下面就簡單對比下幾種
2023-03-28 17:44:11
在變頻器V/F控制中,為什么我們不采用PAM調(diào)制方式?
2023-03-28 16:52:37
電動機容量在多少以下的三相異步電動機可采用直接啟動的方法呢?
2023-03-28 13:49:05
數(shù)碼管動態(tài)顯示控制和按鍵識別方面,在程序設(shè)計時關(guān)鍵的注意點都是什么?
2023-03-28 11:39:49
主體 - 即機座和執(zhí)行機構(gòu),包括臂部、腕部和手部,有的機器人還有行走機構(gòu)。大多數(shù)工業(yè)機器人有3-6個運動自由度,其中腕部通常有1-3個運動自由度;
2023-03-24 12:23:40809 步進電動機是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。一般電動機是連續(xù)旋轉(zhuǎn)的,而步進電動機的轉(zhuǎn)動是一步一步進行 的。每輸入一個脈沖電信號,步進電動機就轉(zhuǎn)動一個角度。通過改變脈沖頻率和數(shù)量,即可實現(xiàn)調(diào)速
2023-03-23 13:55:150 電動執(zhí)行器定位控制在生產(chǎn)生活中具有廣泛的應(yīng)用,在使用搭載步進電機的電動執(zhí)行器進行定位控制的時候,定位系統(tǒng)的定位精度和響應(yīng)波形,會隨著負載質(zhì)量的變化而變化,這是由電動執(zhí)行器核心部 件步進電機本身特性
2023-03-23 11:34:161  電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論