其性能,確保生產(chǎn)過(guò)程的穩(wěn)定性和可靠性。ZR執(zhí)行器廠家將深入探討影響ZR執(zhí)行器性能的關(guān)鍵因素,旨在幫助讀者更好地應(yīng)對(duì)這些挑戰(zhàn)。 1、我們應(yīng)關(guān)注ZR執(zhí)行器的機(jī)械部分。機(jī)械部分的設(shè)計(jì)和制造質(zhì)量對(duì)執(zhí)行器的性能具有決定性影響。高精度、耐磨和
2024-03-20 15:04:38 73
73 
,越來(lái)越受到關(guān)注。ZR執(zhí)行器廠家將深入探討ZR執(zhí)行器的抗干擾能力及其在工業(yè)環(huán)境中的表現(xiàn),旨在幫助讀者更好地了解這一重要議題。 我們要先了解什么是干擾以及為何要關(guān)注抗干擾能力。在工業(yè)環(huán)境中,存在著各種各樣的干擾源,如電磁噪聲
2024-03-15 18:00:12137 
,建議根據(jù)晶振的規(guī)格書和實(shí)際需求選擇合適的外接電容值。
通常,晶振的供應(yīng)商會(huì)提供推薦的電容值范圍。在選擇電容時(shí),還需要考慮電容的質(zhì)量、溫度特性和穩(wěn)定性等因素。如果對(duì)電容值的選擇不確定,可以進(jìn)行實(shí)驗(yàn)和測(cè)試,或者咨詢我們獲取建議。
2024-03-04 11:33:16
本文是通過(guò)IGT-DSER智能網(wǎng)關(guān)讀寫AB羅克韋爾Compact、Control系列PLC的標(biāo)簽數(shù)據(jù)緩存并轉(zhuǎn)為Modbus從站協(xié)議,與上位機(jī)通訊的案例。打開智能網(wǎng)關(guān)的參數(shù)軟件(在附件中),通過(guò)
2024-02-22 18:00:35
在Verilog中,for循環(huán)是并行執(zhí)行的。Verilog是一種硬件描述語(yǔ)言,用于描述和設(shè)計(jì)數(shù)字電路和系統(tǒng)。在硬件系統(tǒng)中,各個(gè)電路模塊是同時(shí)運(yùn)行的,并且可以并行執(zhí)行多個(gè)操作。因此,在Verilog
2024-02-22 16:06:23302 在尋求增強(qiáng)邊緣智能的過(guò)程中,機(jī)電執(zhí)行器等物理邊緣設(shè)備需要更多智能,才能獲得更好的機(jī)器實(shí)時(shí)決策等優(yōu)勢(shì)。這些執(zhí)行器提供智能、有價(jià)值和豐富的傳感器式反饋。此類邊緣設(shè)備是工業(yè)4.0及更高階段的關(guān)鍵。它們控制
2024-02-22 08:23:40265 
我想制作一款傳動(dòng)比為1:500的執(zhí)行器,需要在執(zhí)行器輸出端配置傳感器,實(shí)現(xiàn)執(zhí)行器輸出角度檢測(cè),防夾功能和push to run功能,目前需要選擇一款配合TLE9853芯片使用的傳感器,我主要有以下
2024-02-02 08:07:35
現(xiàn)代位移傳感器的原理和結(jié)構(gòu)有很小的有所不同。如何根據(jù)確切的測(cè)量目的、測(cè)量對(duì)象和測(cè)量環(huán)境恰當(dāng)選取位移傳感器是測(cè)定一定量時(shí)首先要克服的問(wèn)題。確認(rèn)位移傳感器之后,還可確認(rèn)適當(dāng)?shù)臏y(cè)量方法和設(shè)備。位移傳感器的選擇與否恰當(dāng),在很小程度之上同意了測(cè)量結(jié)果的成敗。
2024-01-29 15:49:50161 
我們知道在mySQL客戶端,輸入一條查詢SQL,然后看到返回查詢的結(jié)果。這條查詢語(yǔ)句在 MySQL 內(nèi)部到底是如何執(zhí)行的呢?本文跟大家探討一下哈,我們先來(lái)看下MySQL基本架構(gòu)~
2024-01-22 14:53:23121 
x就是當(dāng)前值currentValue和目標(biāo)值totalValue的差值,簡(jiǎn)稱誤差err,則err = currentValue - totalValue。y就是執(zhí)行器對(duì)應(yīng)的輸出值U,所以執(zhí)行器對(duì)應(yīng)的輸出值U = Kp * ( currentValue - totalValue ) 。
2024-01-18 16:09:51209 
模塊FB是用于控制執(zhí)行器和單元的功能模塊或執(zhí)行某一功能的其他FB的塊。
2024-01-17 09:22:02175 
拉斯維加斯國(guó)際會(huì)展中心正式開幕,各類前沿技術(shù)產(chǎn)品同場(chǎng)“競(jìng)技”,值得關(guān)注的是,以觸覺反饋執(zhí)行器為核心部件的業(yè)內(nèi)首款應(yīng)用于智能手機(jī)的觸覺固態(tài)按鈕驚艷亮相,重
2024-01-11 08:00:30234 
交流電流互感器,因?yàn)殡妷罕桓袘?yīng)到二次線圈中,該二次線圈與流經(jīng)隔離導(dǎo)體的電流成正比。關(guān)鍵的區(qū)別在于,羅氏線圈有一個(gè)空氣芯,而不是電流 互感器,電流互感器依靠高磁導(dǎo)率的鋼芯與二次繞組進(jìn)行磁性耦合。空芯
2023-12-28 10:57:06
我在使用ADE7753和羅氏線圈測(cè)量電流的時(shí)候,看ADE7753手冊(cè)里面講最大接到管腳上的電壓是0.5V,可是我將羅氏線圈掛到電流母線上輸出的波形如下
顯然不滿足,我應(yīng)該怎么辦呢?
2023-12-27 06:10:36
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們該如何選擇伺服電機(jī)的控制方式呢?
2023-12-20 18:22:53894 
特斯拉Optimus的核心運(yùn)動(dòng)控制模組主要為三部分,其中手部環(huán)節(jié)的精密運(yùn)控要求更高。從此前公布的Optimus基本參數(shù)來(lái)看,全身共有28個(gè)執(zhí)行器(14個(gè)旋轉(zhuǎn)執(zhí)行器+14個(gè)線性執(zhí)行器),另外還有手部模組。
2023-12-06 11:00:411375 
在Python中,可以使用一些技術(shù)來(lái)確保程序執(zhí)行完畢后再執(zhí)行其他任務(wù)。下面將詳細(xì)介紹幾種方法。 一、使用阻塞方式執(zhí)行程序 阻塞方式是最簡(jiǎn)單的方法之一,它要求程序在執(zhí)行完畢后再執(zhí)行后續(xù)任務(wù)。可以通過(guò)
2023-11-29 15:09:17999 或許我們平時(shí)大多數(shù)學(xué)習(xí)C語(yǔ)言都是在Windows環(huán)境下學(xué)習(xí)的,對(duì)于程序執(zhí)行的底層邏輯了解的不是非常清楚,所以本文在這里給大家介紹一下,C語(yǔ)言在單片機(jī)中是如何執(zhí)行的。 Part1CPU與外設(shè) 我們知道
2023-11-24 15:45:44751 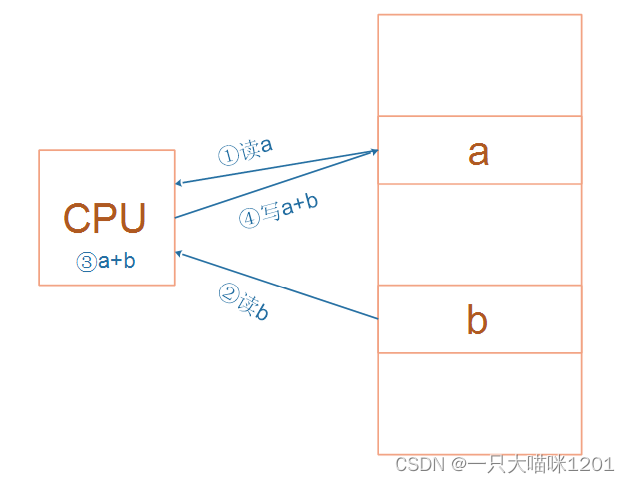
電子發(fā)燒友網(wǎng)站提供《適用于電磁閥執(zhí)行器的穩(wěn)健閉環(huán)控制與監(jiān)測(cè)系統(tǒng).pdf》資料免費(fèi)下載
2023-11-22 11:03:02 0
0 。
本文是GE的RX7i與羅克韋爾的1769-L32E(CompactLogix系列)之間以太網(wǎng)跨網(wǎng)段通訊。L32E采用標(biāo)簽方式通訊,IP地址為192.168.1.9,通訊端口44818;RX7i
2023-11-20 10:10:18
為了增強(qiáng)邊緣智能,機(jī)電執(zhí)行器需要智能和高度集成的驅(qū)動(dòng)器解決方案。這些智能邊緣設(shè)備融合了執(zhí)行器和傳感器功能,支持在機(jī)器層面更好地進(jìn)行實(shí)時(shí)決策,并向更高的控制層級(jí)、云或AI生產(chǎn)力解決方案提供原位反饋信息。本文討論了模擬和數(shù)字技術(shù)交匯之處——智能邊緣的智能驅(qū)動(dòng)器解決方案和技術(shù)。
2023-11-16 15:56:39440 對(duì)于變頻模塊電源我們要如何選擇? 變頻模塊電源是用于給變頻器供電的電源設(shè)備。它的選擇對(duì)于變頻器的性能和穩(wěn)定性至關(guān)重要。在選擇變頻模塊電源時(shí),我們需要考慮幾個(gè)關(guān)鍵因素:功率、效率、可靠性、噪音和成本
2023-11-16 11:17:11364 Shell是一種用于解釋執(zhí)行命令的腳本語(yǔ)言,而Java是一種跨平臺(tái)的面向?qū)ο缶幊陶Z(yǔ)言。在某些情況下,我們可能需要在Shell腳本中執(zhí)行Java程序。本文將介紹如何在Shell中執(zhí)行Java,并提
2023-11-08 10:29:20236 上一章著重講了指令,我們用匯編、C語(yǔ)言等工具編寫的代碼最終也被轉(zhuǎn)化成機(jī)器指令被執(zhí)行。本章進(jìn)一步闡述編程語(yǔ)言如何被加載和執(zhí)行的過(guò)程。
2023-10-31 10:13:01302 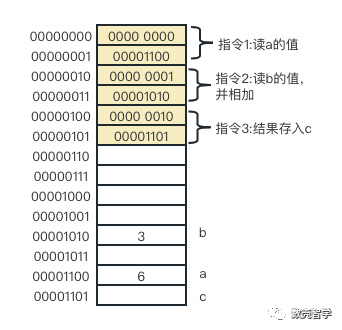
執(zhí)行機(jī)構(gòu)是驅(qū)動(dòng)終端控制單元(閥門,檔板等)的專用設(shè)備,廣泛應(yīng)用于電力、冶金、石油、化工、建材、城市供水、污水處理等行業(yè)
2023-10-30 15:12:360 單電源的優(yōu)缺點(diǎn) 雙電源的優(yōu)缺點(diǎn) 為什么我們在實(shí)際設(shè)計(jì)中會(huì)選擇單電源系統(tǒng)呢? 單電源和雙電源是電子設(shè)計(jì)中常見的兩種電源架構(gòu)。在實(shí)際設(shè)計(jì)中,我們選擇單電源系統(tǒng)還是雙電源系統(tǒng),需要根據(jù)具體的應(yīng)用場(chǎng)
2023-10-29 14:21:40874 金氧半場(chǎng)效晶體管(MOSFET)憑借其通用性和廣泛用途躋身于最受歡迎的晶體管之列。歐時(shí)電子指南將詳述這類晶體管的工作機(jī)制,并提供關(guān)于使用和選擇恰當(dāng)MOSFET類型的實(shí)用建議。
2023-10-26 10:36:16481 
大家有誰(shuí)知道AT89C52怎么選擇外部存儲(chǔ)器,我之前用的是P89V51,選擇外部存儲(chǔ)器是定義AUXR=0x02;,但是現(xiàn)在想用AT89C52單片了,程序該怎么改了啊??AT89C52手??冊(cè)上找不到怎么選擇外部存儲(chǔ)器說(shuō)明,各位高手有誰(shuí)知道啊 ??
2023-10-26 06:11:25
羅克韋爾(AB)跟西門子PLC設(shè)備之間通訊采用IGT-DSER智能網(wǎng)關(guān),支持不同品牌的PLC之間多對(duì)多通訊,還可以調(diào)整字節(jié)順序,PLC內(nèi)不用編程的;
最多64個(gè)任務(wù),最大8000字節(jié),在這個(gè)范圍內(nèi)PLC數(shù)量無(wú)限制,10臺(tái)以上肯定沒(méi)問(wèn)題的,附件中有相關(guān)案例配置文件和軟件資料:
2023-10-24 14:09:55
swer:應(yīng)用為了提升代碼執(zhí)行效率,可能會(huì)選擇直接操作寄存器方式來(lái)實(shí)現(xiàn)軟件功能,直接操作寄存器方式應(yīng)用到中斷標(biāo)志清除上,如果清除時(shí)機(jī)設(shè)計(jì)不恰當(dāng)時(shí),就可能出現(xiàn)中斷函數(shù)被異常多執(zhí)行一次的現(xiàn)象。以
2023-10-23 07:34:21
Intrduction 大家好,今天這篇文章的主要內(nèi)容是講解以及使用一些myCobot 280 的配件,來(lái)了解這些末端執(zhí)行器都能夠完成哪些功能,從而幫助大家能夠正確的選擇一款適合的配件來(lái)進(jìn)行
2023-10-16 16:28:17444 
電子發(fā)燒友網(wǎng)站提供《基于P89C58的智能電動(dòng)執(zhí)行器的設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-10 10:57:211 據(jù)麥姆斯咨詢報(bào)道,近期,MEMS技術(shù)領(lǐng)域的全球領(lǐng)導(dǎo)者Sheba Microsystems宣布推出一款革命性的MEMS自動(dòng)對(duì)焦執(zhí)行器新品,用于嵌入式視覺相機(jī)的主動(dòng)無(wú)熱化調(diào)焦,應(yīng)用領(lǐng)域涵蓋汽車、移動(dòng)機(jī)器人、無(wú)人機(jī)、安防與監(jiān)控等。
2023-10-07 09:55:38339 執(zhí)行器請(qǐng)求 --隨時(shí)間變化的姿態(tài),即平移和旋轉(zhuǎn)速度以及加速度 ?
執(zhí)行器請(qǐng)求:向自主車輛的制動(dòng)、轉(zhuǎn)向和加速
執(zhí)行器發(fā)送控制輸入。 ?
執(zhí)行器反饋:提供來(lái)自車輛
執(zhí)行器的反饋信號(hào)。 --應(yīng)該向系統(tǒng)其他部分公開車輛運(yùn)動(dòng)約束,因?yàn)榇朔答伿潜匾?/div>
2023-10-04 10:13:00296 傳感器提供的數(shù)據(jù)進(jìn)行分析和決策。它可以根據(jù)預(yù)設(shè)的農(nóng)田特性、作物需求和氣象條件等,運(yùn)算出最佳的灌溉方案,并自動(dòng)調(diào)整灌溉周期和用水量。 (3)控制執(zhí)行器:PLC驅(qū)動(dòng)灌溉系統(tǒng)中的執(zhí)行器,如電磁閥或水泵,在恰當(dāng)的時(shí)間啟停,控制灌溉的開始和結(jié)
2023-09-21 08:35:01326 SE5盒子如何修改IP?執(zhí)行bm_set_ip提示沒(méi)有該命令?
2023-09-20 07:45:35
最后我們執(zhí)行order by 將數(shù)據(jù)按照一定順序排序,比如這里按照id排序。如果此時(shí)有l(wèi)imit那么查詢到相應(yīng)的我們需要的記錄數(shù)時(shí),就不繼續(xù)往下查了。
2023-09-16 12:49:20752 
狀態(tài)機(jī)是由一系列的命令和條件組成的邏輯,執(zhí)行器按照這個(gè)邏輯和傳感器數(shù)據(jù)生成的周期一步一步執(zhí)行。命令:? 每個(gè)命令占8個(gè)比特,有時(shí)后面還有參數(shù)。? 當(dāng)執(zhí)行器執(zhí)行的到一個(gè)命令時(shí),指針會(huì)立刻指向下一個(gè)命令
2023-09-06 06:18:27
在編寫了大量代碼之后,不禁讓人思考,計(jì)算機(jī)究竟是如何理解并執(zhí)行我們所寫的代碼的呢?這個(gè)問(wèn)題將引導(dǎo)我們深入了解計(jì)算機(jī)的內(nèi)部工作原理,從二進(jìn)制到邏輯電路,再到運(yùn)算器和控制器的協(xié)同工作,探究計(jì)算機(jī)是如何執(zhí)行代碼的。
2023-09-05 09:54:29268 
ST IO-Link從站執(zhí)行器設(shè)計(jì)方案
2023-09-05 08:01:54
2023-09-01 08:30:013 格芯(GlobalFoundries)的法務(wù)長(zhǎng)艾薩(Saam Azar)在接受德國(guó)《明鏡周刊》采訪時(shí)說(shuō):“臺(tái)積電規(guī)模比格芯大10多倍,現(xiàn)在打算與格芯的3個(gè)主要客戶在旁邊生產(chǎn)芯片,直接與格芯競(jìng)爭(zhēng),受到巨大的補(bǔ)貼計(jì)劃。”“這是公正又恰當(dāng)的嗎?”
2023-08-28 10:06:44358 官網(wǎng)上關(guān)于 M051 的BSP有M051_Series_BSP_CMSIS_Rev3.00.001.zip與M058S SeriesBSP_CMSIS_V1.00.002.zip這2種, 分別使用不同的CMSIS版本, 該如何選擇呢?
2023-08-25 08:08:04
NUC976DK62Y處理核心,該核心運(yùn)行至300兆赫。托馬托包括NAU8822音頻編碼器,特別適合音頻處理。它還有內(nèi)置的64MBDDDDDD2 RAM, 提供全面和豐富的接口選擇, 包括10/ 100 Mbps
2023-08-24 07:42:35
電子發(fā)燒友網(wǎng)站提供《通過(guò)博通和希捷實(shí)現(xiàn)卓越的數(shù)據(jù)中心性能雙執(zhí)行器硬盤存儲(chǔ).pdf》資料免費(fèi)下載
2023-08-22 10:31:020 這是我們實(shí)際上SQL執(zhí)行順序:
我們先執(zhí)行from,join來(lái)確定表之間的連接關(guān)系,得到初步的數(shù)據(jù)
where對(duì)數(shù)據(jù)進(jìn)行普通的初步的篩選
2023-08-18 12:37:26475 
學(xué)識(shí)淵博的人你好,我們在編寫軟件程序的時(shí)候出現(xiàn)的一些問(wèn)題。在仿真執(zhí)行自定義custom指令時(shí),只能執(zhí)行軟件程序中所調(diào)用第一條,而后在仿真中會(huì)退出該指令無(wú)限進(jìn)入idle狀態(tài)不能進(jìn)行下一條軟件所調(diào)用指令
2023-08-16 07:07:57
特斯拉的人形機(jī)器人中共有28個(gè)運(yùn)動(dòng)關(guān)節(jié),包括三種旋轉(zhuǎn)執(zhí)行器和三種線性執(zhí)行器。分布于肩髖等需要大角度旋轉(zhuǎn)關(guān)節(jié)所采用的主要是旋轉(zhuǎn)執(zhí)行器,而線性執(zhí)行器主要分布于膝肘等擺動(dòng)角度不大的單自由度關(guān)節(jié),以及腕踝兩個(gè)雙自由度但是體積緊湊的關(guān)節(jié)。
2023-08-14 09:22:26168 電子發(fā)燒友網(wǎng)站提供《IO-Link Master/IO Hub/IO-Link傳感器和執(zhí)行器解決方案.pdf》資料免費(fèi)下載
2023-08-01 11:26:007 我們初學(xué)C語(yǔ)言時(shí)老師肯定講過(guò)C語(yǔ)言的執(zhí)行過(guò)程:預(yù)處理——編譯——匯編——鏈接。
2023-07-31 11:28:25705 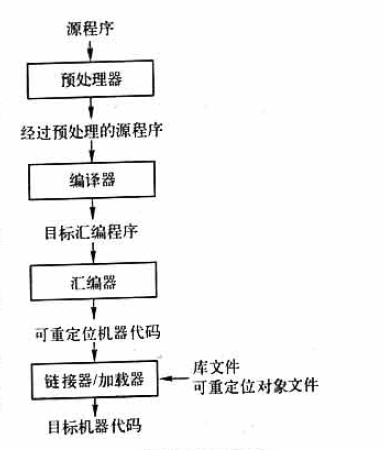
電子發(fā)燒友網(wǎng)站提供《ST IO-Link從站執(zhí)行器設(shè)計(jì)方案.pdf》資料免費(fèi)下載
2023-07-29 11:00:261 如果你快速進(jìn)行百度搜索,你會(huì)發(fā)現(xiàn)很多不同的答案。分析響應(yīng)得出一個(gè)共同的主題——執(zhí)行器是一種使物體移動(dòng)或操作的設(shè)備。
2023-07-25 16:08:47326 
但目前對(duì)于特斯拉而言,Optimus的產(chǎn)能提升還面臨著多項(xiàng)挑戰(zhàn)——而產(chǎn)能受限的原因主要是缺乏現(xiàn)成的執(zhí)行器,Optimus連執(zhí)行器都需要定制,目前沒(méi)有供應(yīng)商生產(chǎn)Optimus需要的執(zhí)行器。
2023-07-20 17:08:07871 執(zhí)行器供電 汽車控制器通過(guò)控制信號(hào)和電能轉(zhuǎn)換等方式控制執(zhí)行器,實(shí)現(xiàn)對(duì)汽車各個(gè)系統(tǒng)的控制和調(diào)節(jié)。這些執(zhí)行器類型主要有以下幾種: ·電機(jī)執(zhí)行器:用于控制汽車電機(jī)的運(yùn)行狀態(tài),如BLDC,PMSM,IM
2023-07-19 10:50:492247 
如何選擇aps高級(jí)排程公司更適合我們?在選購(gòu)aps高級(jí)排程的時(shí)候,一些朋友由于不清楚其中的選購(gòu)技巧,許多時(shí)候會(huì)掉入些許選擇誤區(qū),導(dǎo)致我們買不了合適我們選擇的aps高級(jí)排程。因此選擇適合我們的aps
2023-07-18 17:33:42194 TDK株式會(huì)社(東京證券交易所代碼:6762)推出兩款新的采用符合RoHS要求的鋯鈦酸鉛 (PZT) 材料制成的銅內(nèi)電極壓電執(zhí)行器——COM30S5和COM45S5。新款元件采用TDK獲得專利
2023-07-15 14:40:04299 ? TDK株式會(huì)社(東京證券交易所代碼:6762)推出兩款新的采用符合RoHS要求的鋯鈦酸鉛 (PZT) 材料制成的銅內(nèi)電極壓電執(zhí)行器——COM30S5和COM45S5。新款元件采用TDK獲得專利
2023-07-14 13:46:11283 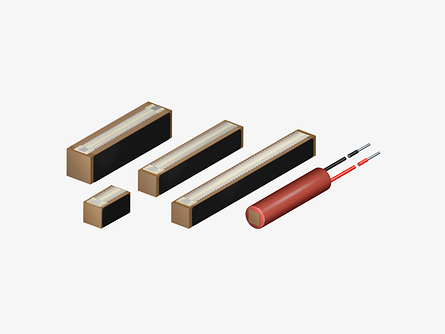
隨著現(xiàn)代工業(yè)網(wǎng)絡(luò)逐步支持先進(jìn)協(xié)議,工廠車間的傳感器實(shí)現(xiàn)遠(yuǎn)程實(shí)時(shí)監(jiān)控和配置成為可能,令生產(chǎn)停機(jī)時(shí)間大幅縮短。不過(guò),將傳感器和執(zhí)行器連接至安裝了進(jìn)程控制器的接線柜,卻仍是一項(xiàng)人工密集型工作,非常繁瑣。
2023-07-13 17:00:24352 
電子發(fā)燒友網(wǎng)站提供《智能設(shè)備控制的模塊化執(zhí)行器開源項(xiàng)目.zip》資料免費(fèi)下載
2023-07-12 11:46:010 我們知道 Cortex-M3 系列單片機(jī)內(nèi)部有雙堆棧機(jī)制。即 Cortex‐M3 擁有兩個(gè)堆棧指針:主堆棧(MSP)和進(jìn)程堆棧(PSP)。任一時(shí)刻只能使用其中的一個(gè)。通過(guò)控制寄存器 CONTROL 中的選擇位進(jìn)行控制。
2023-07-12 11:24:471217 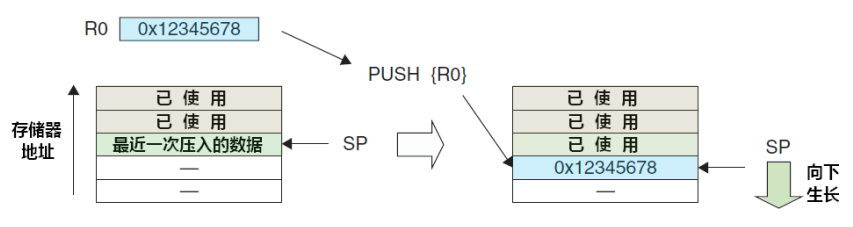
電子發(fā)燒友網(wǎng)站提供《BeagleBone Black Wireless、MotorCape和線性執(zhí)行器.zip》資料免費(fèi)下載
2023-07-05 10:34:320 為了保證伺服電動(dòng)機(jī)及步進(jìn)電動(dòng)機(jī)等控制用電動(dòng)機(jī)的優(yōu)異控制性能,組裝到電動(dòng)機(jī)中的減速機(jī)要求具備高轉(zhuǎn)矩/質(zhì)量比、強(qiáng)大的角度傳動(dòng)精度、低齒隙等特性。組裝有Harmonic Drive的執(zhí)行元件憑借其優(yōu)異性能,在不破壞電動(dòng)機(jī)控制性能的情況下能夠獲得高減速以及高分辨率。
2023-06-28 12:00:00389 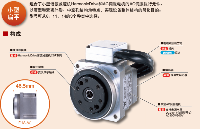
執(zhí)行器傳統(tǒng)上使用機(jī)械原理(氣動(dòng)、液壓)來(lái)打開和關(guān)閉閥門,但在許多應(yīng)用中,電控電機(jī)已經(jīng)取代了這些原理。盡管如此,執(zhí)行器將始終具有移動(dòng)部件。這些會(huì)產(chǎn)生摩擦,需要持續(xù)監(jiān)控和維護(hù),以防止可能導(dǎo)致生產(chǎn)意外停止
2023-06-27 11:25:46296 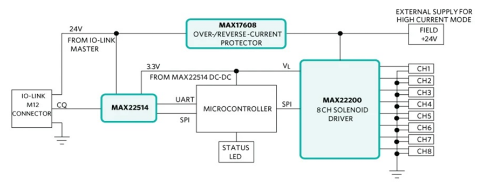
旋轉(zhuǎn)執(zhí)行器、線性執(zhí)行器、靈巧手共同構(gòu)建擎天柱全身40個(gè)關(guān)節(jié)。旋轉(zhuǎn)執(zhí)行器由角接觸軸承、諧波減速器、交叉滾子軸承、編碼器、無(wú)框電機(jī)、力矩傳感器構(gòu)成。特斯拉線性執(zhí)行器由深溝球軸承、無(wú)框電機(jī)、力矩傳感器、編碼器、反式滾柱和四點(diǎn)接觸球軸承構(gòu)成。
2023-06-26 15:43:28400 
負(fù)載電流電源為模塊的輸入/輸出電路以及傳感器和執(zhí)行器進(jìn)行供電。
2023-06-26 14:37:593928 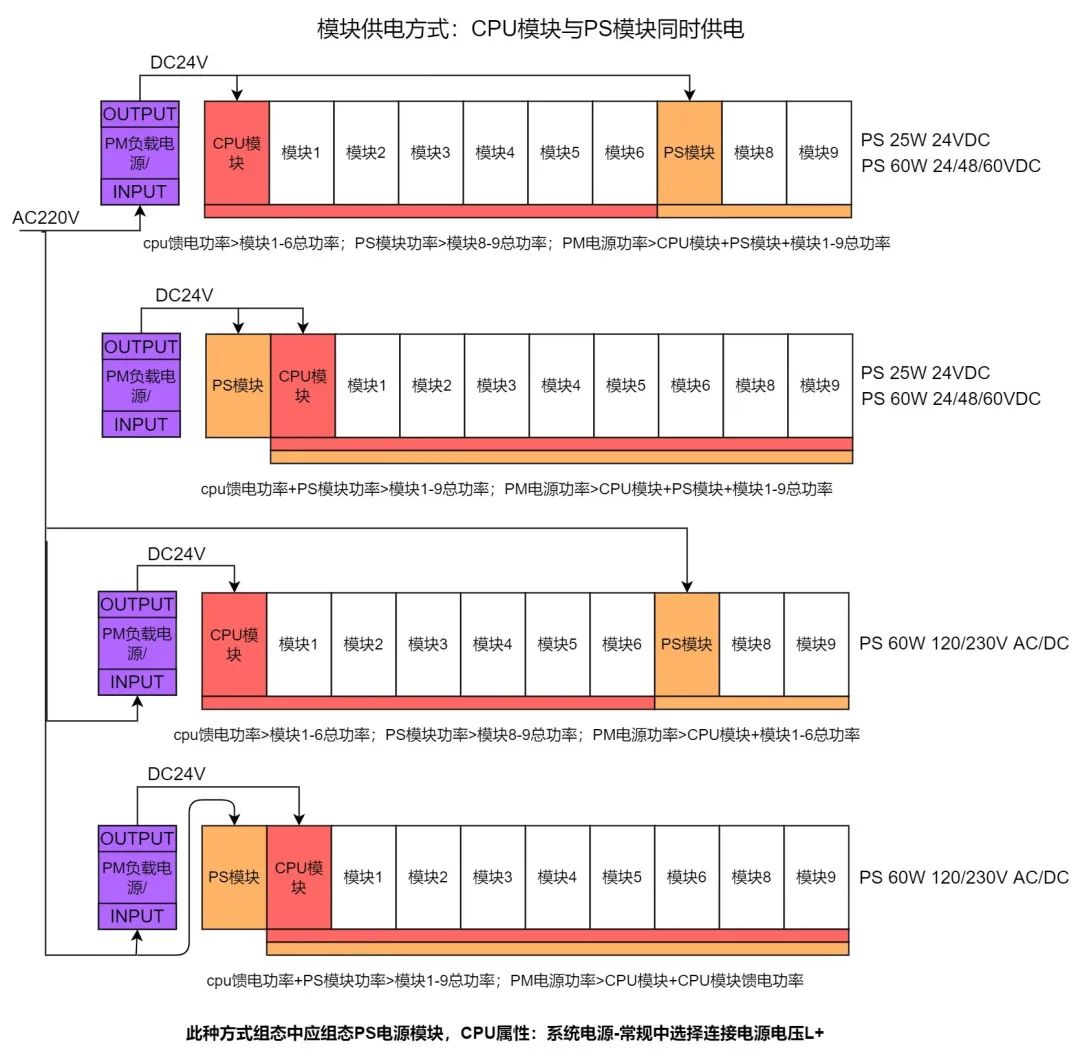
北方某客戶在CMP設(shè)備使用了哈默納科執(zhí)行器SHA、RSF、HMA和FHA系列產(chǎn)品,滿足了客戶對(duì)于提高控制精度,高速定位,緊湊安裝空間的需求。
2023-06-14 09:48:39327 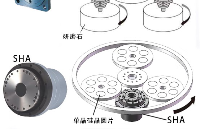
什么是傳感器?傳感器是一種負(fù)責(zé)檢測(cè)物理和化學(xué)尺寸并將其轉(zhuǎn)換為電信號(hào)或脈沖的設(shè)備,我們可以找到數(shù)百個(gè)測(cè)量各種量級(jí)的汽車傳感器,其中一些可能是:溫度、發(fā)動(dòng)機(jī)進(jìn)氣量、與障礙物的距離、運(yùn)動(dòng)等。
2023-06-08 15:46:25478 
執(zhí)行器是一種機(jī)電一體化的裝置,主要用于機(jī)械設(shè)備、工業(yè)自動(dòng)化等領(lǐng)域中,用于控制機(jī)械的運(yùn)動(dòng)、位置和力量等參數(shù),是自動(dòng)化控制系統(tǒng)中的重要組成部分。執(zhí)行器廣泛應(yīng)用于:機(jī)床、工業(yè)機(jī)器人、自動(dòng)化生產(chǎn)線、冶金、化工、塑料、制藥、食品、紡織、印刷、包裝、玻璃、木工、建筑、航空航天、軌道交通等各個(gè)領(lǐng)域。
2023-06-02 09:30:405230 還記得兩三年前,當(dāng)我們談?wù)撾娮与姎饧軜?gòu)(Electrical/Electronic Architecture,EEA)的時(shí)候,還是談?wù)摲植际郊軜?gòu)到域控架構(gòu)的升級(jí),關(guān)于中央計(jì)算單元+區(qū)域控制器架構(gòu),感覺還是遙不可及,電子電氣架構(gòu)發(fā)展階段圖如下所示。
2023-05-22 10:59:59261 
線性執(zhí)行器可將電機(jī)轉(zhuǎn)子固有的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為適用于各類大小負(fù)載的直線運(yùn)動(dòng)。它由電機(jī)、直線導(dǎo)軌和驅(qū)動(dòng)控制電子元件組成,此外還可能包含有線/無(wú)線連接和控制方案。雖然線性執(zhí)行器對(duì)用戶的存在感很低,但它是廣泛
2023-05-17 09:41:38366 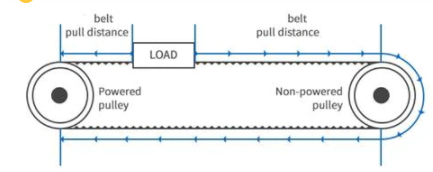
寫入值 0xFFFF FF88。但不幸的是,這沒(méi)有被考慮在內(nèi)。在寫入這個(gè)寄存器之前,我們是否必須執(zhí)行特定的操作。
在MPC885的參考手冊(cè)中,我們沒(méi)有發(fā)現(xiàn)任何指示表明該操作是不可能的。
我們是否必須先
2023-05-12 08:41:40
我們計(jì)劃在我們的設(shè)計(jì)中使用MIMXRT1024CAG4B。您能否澄清 JTAG 引腳是否可以用作該控制器中的 GPIO 引腳?此外,我們計(jì)劃將 JTAG_TDI 引腳用作看門狗定時(shí)器的看門狗輸入 (WDI) 的 GPIO?
有什么我們應(yīng)該注意的問(wèn)題或注意事項(xiàng)嗎?
2023-05-05 13:57:04
還記得兩三年前,當(dāng)我們談?wù)撾娮与姎饧軜?gòu)(Electrical/Electronic Architecture,EEA)的時(shí)候,還是談?wù)摲植际郊軜?gòu)到域控架構(gòu)的升級(jí),關(guān)于中央計(jì)算單元+區(qū)域控制器架構(gòu),感覺還是遙不可及,電子電氣架構(gòu)發(fā)展階段圖如下所示。
2023-04-27 12:23:46436 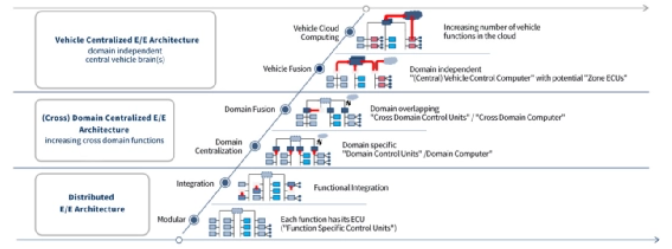
,5口(-)6 口(+)和3、4電源連接并工作。
一個(gè)繼電器對(duì)應(yīng)一個(gè)執(zhí)行器設(shè)備,執(zhí)行器正負(fù)極連接繼電器,繼電器連接好正負(fù)級(jí)后7口接出控制信號(hào)到數(shù)字量采集器-4150對(duì)應(yīng)執(zhí)行器通道D00-D07。
備注:三色燈、電動(dòng)推桿的繼電器布線以及全部其他設(shè)備布線,實(shí)際安裝布線請(qǐng)看物
2023-04-26 11:13:050 PCB印制線路該如何選擇表面處理電路材料依靠?jī)?yōu)質(zhì)的導(dǎo)體和介質(zhì)材料將現(xiàn)代復(fù)雜部件相互連接起來(lái),以實(shí)現(xiàn)最佳性能。但是作為導(dǎo)體的這些PCB銅導(dǎo)體,無(wú)論直流還是 毫米波的PCB板 ,都需要抗老化和氧化保護(hù)
2023-04-19 11:53:15
【主要特性】 減速器采用中空超扁平設(shè)計(jì),結(jié)構(gòu)更緊湊,整機(jī)更小巧,執(zhí)行器自重更輕<1.5kg執(zhí)行器根據(jù)實(shí)際需求定制安裝抱閘
2023-04-19 10:40:37
【主要特性】 減速器采用中空超扁平設(shè)計(jì),結(jié)構(gòu)更緊湊,整機(jī)更小巧,執(zhí)行器自重更輕<1.5kg執(zhí)行器根據(jù)實(shí)際需求定制安裝抱閘
2023-04-17 18:01:33
幾乎每一個(gè)電子系統(tǒng)均需要某種類型的邏輯器件。憑借TI的海量產(chǎn)品組合,我們差不多能幫助滿足任何邏輯需求。雖然所有這些器件都供用戶精挑細(xì)選,但有時(shí)為一種設(shè)計(jì)選擇恰當(dāng)的邏輯器件卻是一項(xiàng)令人望而生畏的工作
2023-04-17 09:29:46361 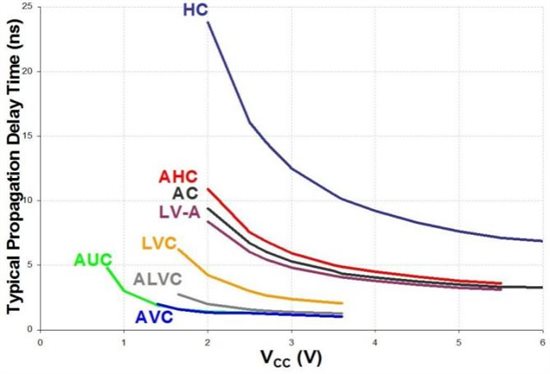
尼得科傳動(dòng)技術(shù)株式會(huì)社(舊:日本電產(chǎn)新寶株式會(huì)社)推出了一款將電機(jī)組裝進(jìn)精密控制用減速機(jī)“FLEXWAVE”的超扁平執(zhí)行器。 隨著少子老齡化進(jìn)程的加快,動(dòng)力輔助服的市場(chǎng)需求越來(lái)越大,以輔助重體力勞動(dòng)
2023-04-13 15:50:04519 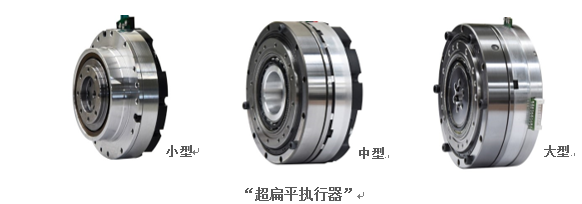
尼得科傳動(dòng)技術(shù)株式會(huì)社(舊日本電產(chǎn)新寶株式會(huì)社)推出了一款將電機(jī)組裝進(jìn)精密控制用減速機(jī)“FLEXWAVE”的超扁平執(zhí)行器。
2023-04-12 15:57:34352 
直徑選擇線圈長(zhǎng)度,以提供最佳的傳輸特性。 該技術(shù)可以非常精確地檢測(cè)初級(jí)電流的變化率(導(dǎo)數(shù)),該速率在線圈端子處感應(yīng)出成比例的電壓。這是一種僅適用于交流電流的電流測(cè)量技術(shù)。通常添加電子積分器電路以將該
2023-04-07 09:43:05
誰(shuí)能告訴我如何執(zhí)行能量掃描,并選擇最佳的 zigbee 通道。
2023-04-07 06:48:55
執(zhí)行器接口的最后評(píng)論,我們應(yīng)該強(qiáng)調(diào),只有我們選擇的設(shè)備的速度控制和位置傳感特性的性質(zhì)引導(dǎo)我們將 u(t) 和 y(t) 都指定為我們實(shí)施中的電壓值。這些數(shù)值沒(méi)有其他關(guān)系,如果受控設(shè)備接口的性質(zhì)另有規(guī)定,在
2023-04-04 15:11:34
受工業(yè)機(jī)器人發(fā)展帶動(dòng),末端執(zhí)行器行業(yè),特別是夾爪市場(chǎng),已成為廣受關(guān)注的領(lǐng)域。據(jù)推算,全球制造業(yè)每年消耗超過(guò)3000萬(wàn)個(gè)模塊化夾爪,而氣動(dòng)夾爪市場(chǎng)規(guī)模已達(dá)到百億元級(jí)別。
2023-04-04 10:29:16299 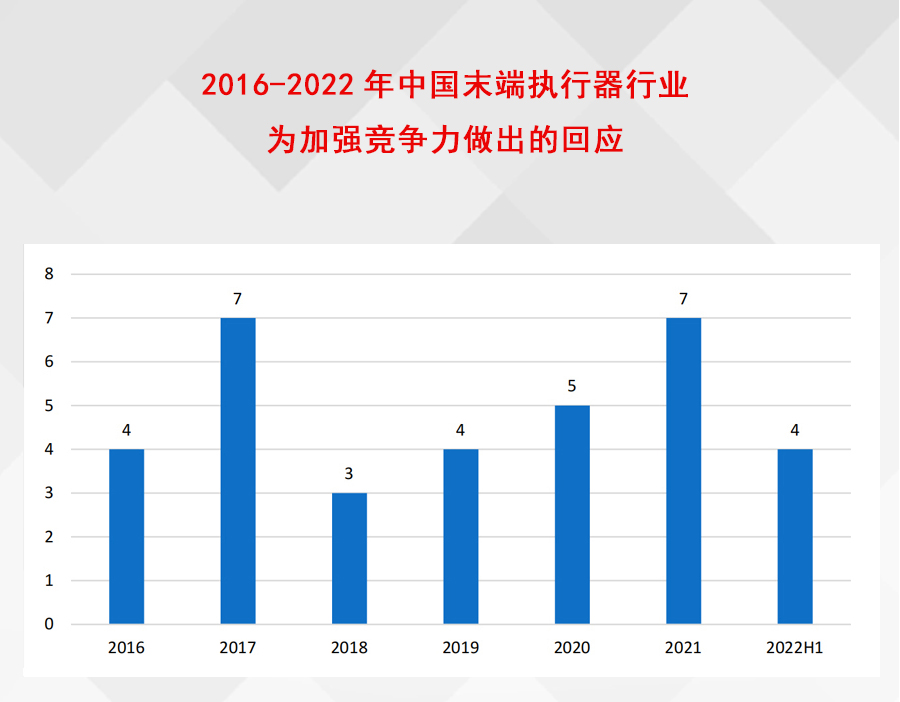
TX_UNDERSHOOT_PROT_ENABLE。 目前我們通過(guò)閱讀器 FW 執(zhí)行此操作,但速度慢、麻煩且不是最佳選擇。 是否可以在 PN5180 的固件中為 AWC 添加功能,該功能已經(jīng)更改了與 DPC 齒輪相關(guān)的參數(shù)。 或者,是否有可能從讀者那里獲得中斷,每次換檔時(shí),我們都可以以更優(yōu)化的方式更改該參數(shù)。
2023-04-03 08:23:37
還記得兩三年前,當(dāng)我們談?wù)撾娮与姎饧軜?gòu)(Electrical/Electronic Architecture,EEA)的時(shí)候,還是談?wù)摲植际郊軜?gòu)到域控架構(gòu)的升級(jí),關(guān)于中央計(jì)算單元+區(qū)域控制器架構(gòu)
2023-03-27 08:00:47505 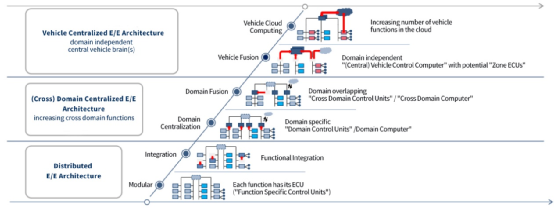
電動(dòng)執(zhí)行器定位控制在生產(chǎn)生活中具有廣泛的應(yīng)用,在使用搭載步進(jìn)電機(jī)的電動(dòng)執(zhí)行器進(jìn)行定位控制的時(shí)候,定位系統(tǒng)的定位精度和響應(yīng)波形,會(huì)隨著負(fù)載質(zhì)量的變化而變化,這是由電動(dòng)執(zhí)行器核心部 件步進(jìn)電機(jī)本身特性
2023-03-23 11:34:161 )。現(xiàn)在我們正在嘗試從未融合單元上的 FLEXSPI NOR 存儲(chǔ)器啟動(dòng)生產(chǎn)測(cè)試應(yīng)用程序。我正在嘗試使用 MIMXRT1060 的閃存加載器將應(yīng)用程序加載到 NOR 內(nèi)存中。寫入似乎沒(méi)問(wèn)題,但應(yīng)用程序似乎
2023-03-23 07:37:28
帶增壓調(diào)節(jié)器的壓電微執(zhí)行器驅(qū)動(dòng)器 TSOT23-8 2.5~16V 2mA
2023-03-23 05:01:59
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論