 電子發(fā)燒友App
電子發(fā)燒友App


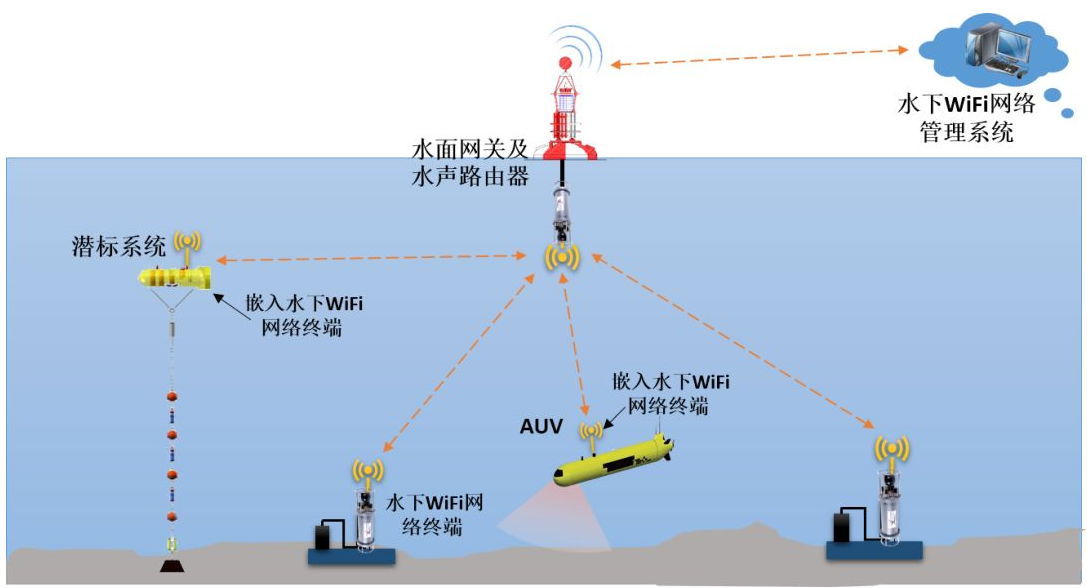
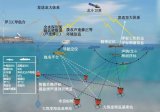
AUV水下工作定位難
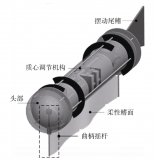
自主式水下航行器(AUV)是一種重要的用于水下勘測(cè)的機(jī)器人,同時(shí)也是用于檢測(cè)的精密儀器。
AUV在進(jìn)行水下任務(wù)時(shí)會(huì)遇到兩個(gè)難題:
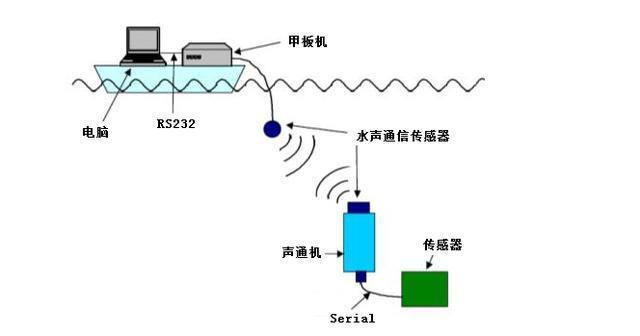
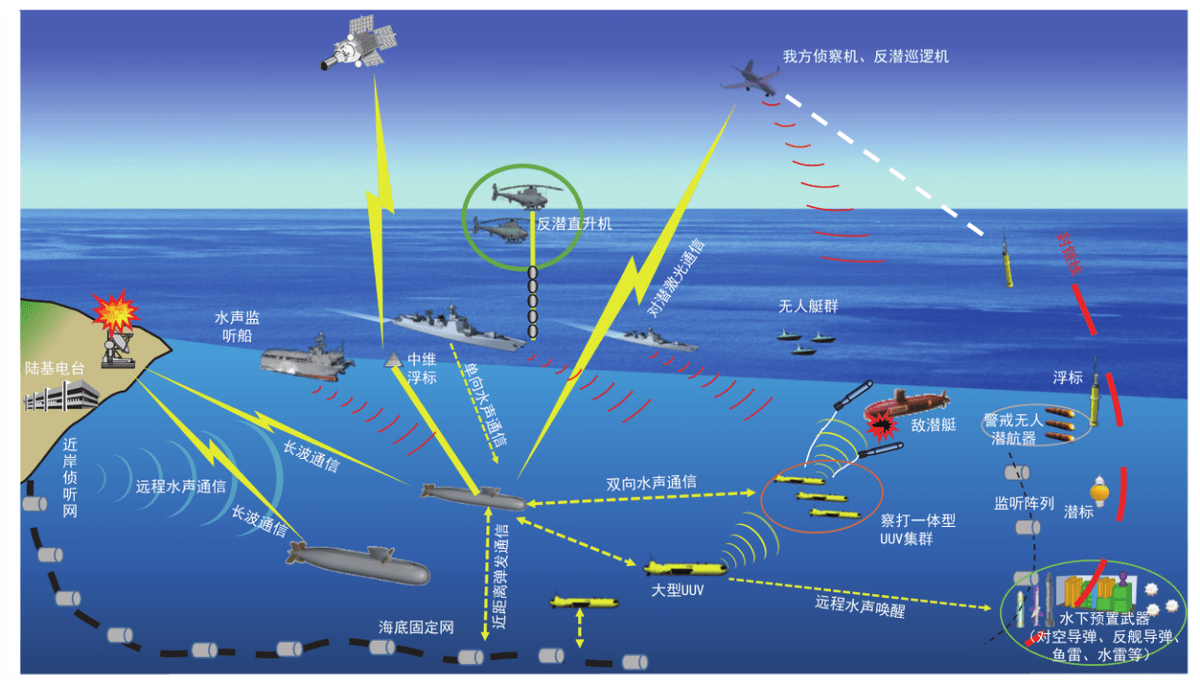
一是在沒(méi)有具體的環(huán)境信息的條件下,水下機(jī)器人是無(wú)法進(jìn)行水下作業(yè)、定位、路徑規(guī)劃等一系列的任務(wù);
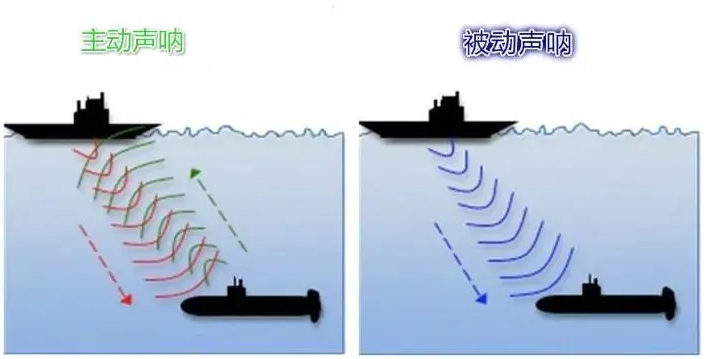
二是水下環(huán)境極其復(fù)雜多變、干擾多、噪聲大。因此解決AUV在水下的定位是在水下作業(yè)的一個(gè)重要前提。
真尚有水下定位有方法
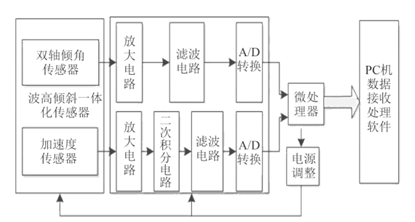
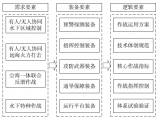
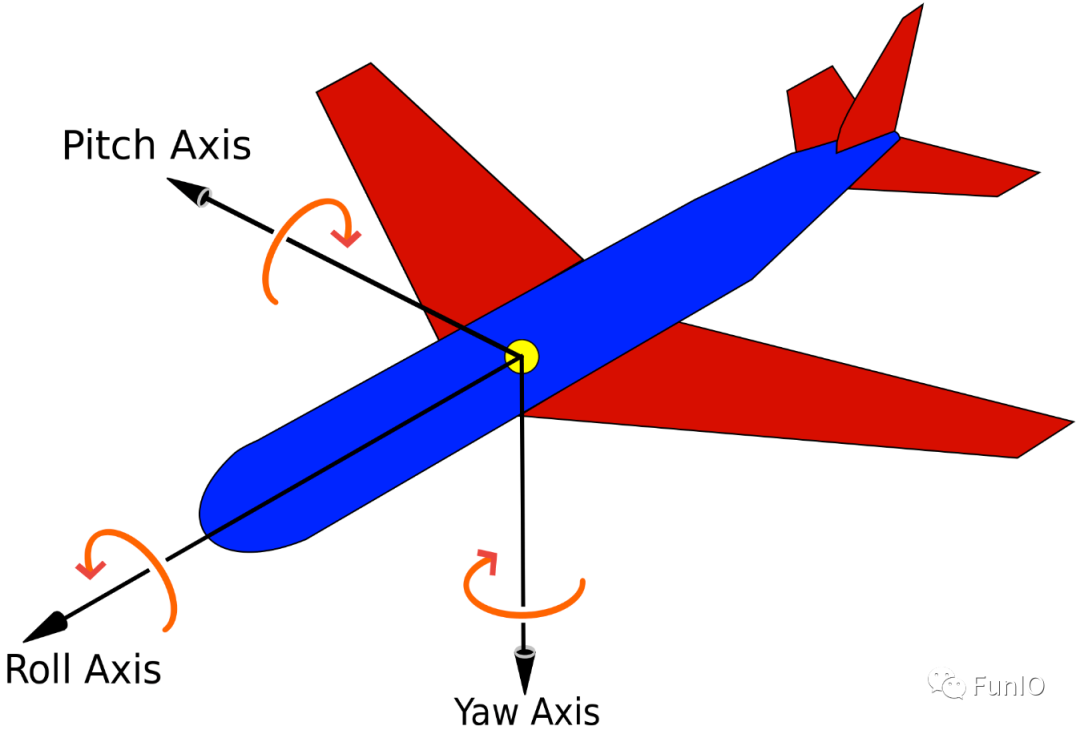
真尚有水下高度,航向和姿態(tài)測(cè)量方案利用寬帶復(fù)合傳感器和先進(jìn)的數(shù)字聲引擎來(lái)提供500kHz高度計(jì)所能提供的最高穩(wěn)定性和范圍。借助集成的AHRS,可以補(bǔ)償俯仰和橫滾,從而始終提供真實(shí)的高度讀數(shù)。對(duì)于需要高度,航向,俯仰和橫滾的應(yīng)用;所有這些都可以通過(guò)單個(gè)設(shè)備提供。
fqj







































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論