的優(yōu)異特點。低壓伺服驅(qū)動器通過力矩、速度、位置三種方式對伺服電機進行精準(zhǔn)控制,被廣泛應(yīng)用于低壓供電場合、定位控制、移動供電場合等安裝空間小、用電安全高的自動化應(yīng)用場景
2024-03-21 08:16:26 118
118 
PLC接步進電機或者伺服驅(qū)動器的時候,要不要加裝電阻? 在PLC接步進電機或伺服驅(qū)動器時,是否需要加裝電阻這個問題存在很多不同的觀點和解釋。 首先,讓我們先了解一下步進電機和伺服驅(qū)動器的基本原理
2024-02-18 15:13:59472 的工作原理 交流伺服電機是一種特殊的交流電機,由電機本身和電機驅(qū)動器組成。電機驅(qū)動器負責(zé)電機的控制和保護功能,通常包含電源模塊、控制模塊、位置檢測模塊和功率輸出模塊。 在交流伺服電機中,控制模塊起著核心的作用。它接
2024-02-18 14:59:25268 伺服驅(qū)動器A、B、C相脈沖輸出的作用,以及如何與PLC進行連接。 作用: 1. 方向控制:A、B、C相脈沖輸出可用于驅(qū)動器的方向控制。通過改變脈沖的相位或頻率,可以控制伺服電機的運動方向,實現(xiàn)正轉(zhuǎn)、反轉(zhuǎn)等功能。 2. 位置控制:伺服驅(qū)動器的脈沖
2024-02-06 09:11:41958 電機驅(qū)動器是用于控制電動機運行的設(shè)備,它可以調(diào)節(jié)電機的速度、轉(zhuǎn)矩、位置等參數(shù),以滿足不同應(yīng)用場景的需求。在選擇和使用電機驅(qū)動器時,通常需要考慮以下四大要點: 匹配性:電機驅(qū)動器與電動機之間的匹配
2024-02-05 11:32:33343 伺服電機驅(qū)動器是一種電子設(shè)備或電路,用于控制伺服電機的運動。伺服電機驅(qū)動器接收來自控制系統(tǒng)的命令信號,并將這些信號轉(zhuǎn)換為對伺服電機的控制信號,以產(chǎn)生與命令信號成比例的運動。
2024-02-04 17:20:491048 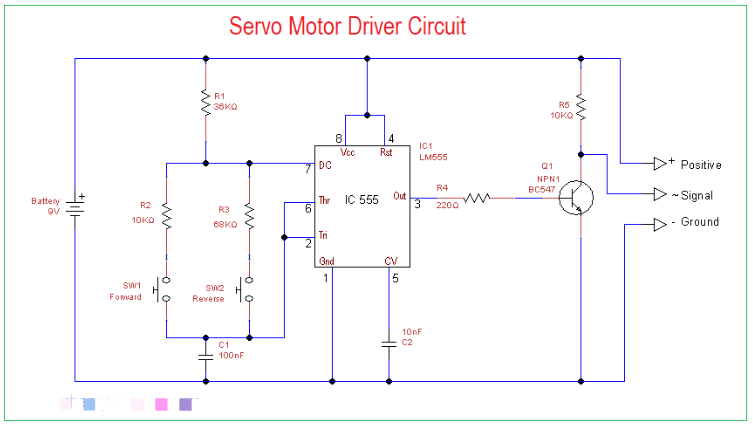
該伺服驅(qū)動器采用有2個相同的伺服電機驅(qū)動板,電機編碼器信號通過接口反饋給控制芯片。伺服電機控制信號通過光耦連接到后端伺服電機驅(qū)動芯片控制端。
2024-01-22 14:45:43293 
伺服驅(qū)動器作為自動化設(shè)備的核心部件之一,其作用和原理對于理解自動化設(shè)備的工作原理具有重要意義。本文將為您詳細介紹伺服驅(qū)動器的作用與原理。 一、伺服驅(qū)動器的作用 伺服驅(qū)動器是一種用于控制伺服電機
2024-01-17 17:52:45605 及相關(guān)注意事項。 一、伺服驅(qū)動器輸出電壓的基本原理 伺服驅(qū)動器的輸出電壓是通過對輸入信號的處理和放大而來。伺服驅(qū)動器接收到控制信號后,將其進行放大,并驅(qū)動電機輸出相應(yīng)的電壓。這些輸出電壓可以通過測量來確定伺
2024-01-17 09:34:04653 的指南。 了解步進電機驅(qū)動器的基本原理 步進電機驅(qū)動器是一種用于控制步進電機的電子裝置。它將電流轉(zhuǎn)換為步進電機可以理解的信號,從而驅(qū)動電機進行精確的轉(zhuǎn)動。在調(diào)整撥碼開關(guān)之前,需要了解步進電機驅(qū)動器的基本原理。 確
2024-01-15 13:56:45730 伺服驅(qū)動器是一種用于控制伺服電機的設(shè)備,它通過輸出特定的電壓信號來驅(qū)動電機轉(zhuǎn)動。因此,測量伺服驅(qū)動器的輸出電壓可以為我們提供有關(guān)電機運行狀態(tài)和性能的重要信息。下面將詳細介紹如何測量伺服驅(qū)動器的輸出
2024-01-15 11:22:06590 伺服電機和伺服電機驅(qū)動器是緊密相關(guān)的兩個部分,它們通常作為一個完整的系統(tǒng)來實現(xiàn)精確的運動控制。
2024-01-13 17:53:221243 步進電機驅(qū)動器是一種常用的電機驅(qū)動設(shè)備,它能夠?qū)㈦娏餍盘栟D(zhuǎn)換為電機的轉(zhuǎn)動。參數(shù)設(shè)置是決定步進電機驅(qū)動器性能的重要因素之一。在本文中,我將詳細介紹步進電機驅(qū)動器的參數(shù)設(shè)置,包括驅(qū)動器的電流設(shè)置、步數(shù)分
2024-01-11 16:55:41581 伺服驅(qū)動器是現(xiàn)代工業(yè)自動化系統(tǒng)中常用的一種執(zhí)行控制的設(shè)備,它能夠通過電信號控制電機的速度和位置。設(shè)置伺服驅(qū)動器的參數(shù)是使用伺服驅(qū)動器前必須要進行的一項工作,下面將從硬件安裝和軟件配置兩個方面詳細介紹
2024-01-11 10:51:13796 SMART控制的驅(qū)動器自動運行時如何實現(xiàn)伺服電機反轉(zhuǎn)的
2024-01-10 06:30:14
決方法。 ASDAB2伺服驅(qū)動器報警通常通過報警燈或液晶屏上的報警代碼來指示。不同的報警代碼代表不同的故障類型,并需要采取相應(yīng)的措施進行處理。在解讀報警代碼之前,我們首先需要了解伺服驅(qū)動器的工作原理。 ASDAB2伺服驅(qū)動器中的伺服控制器和電機構(gòu)成了
2023-12-28 17:18:541725 伺服電機是一種高性能、高精度的電機,廣泛應(yīng)用于自動化控制系統(tǒng)中。要實現(xiàn)伺服電機的正常工作,就需要將其連接到適當(dāng)?shù)?b class="flag-6" style="color: red">驅(qū)動器上。下面,將介紹伺服電機與驅(qū)動器的連接方法。 一、接線準(zhǔn)備 確定伺服電機和驅(qū)動器
2023-12-20 09:47:321054 伺服電機是否必須有對應(yīng)的伺服驅(qū)動器來控制?沒有伺服驅(qū)動器能使用伺服電機嗎?怎么控制?首次接觸,不懂
2023-12-15 07:49:19
最近使用的有臺帶編碼器的伺服電機(配著相應(yīng)的伺服驅(qū)動器)漏油,想拆開更換油封,但是聽說伺服電機拆開自己不能安裝。因為涉及到編碼器的位置。我想問一下:
1.帶編碼器的電機能拆開嗎?
2.電機拆開的話
2023-12-15 06:57:52
IGBT7與IGBT4在伺服驅(qū)動器中的對比測試
2023-12-14 11:31:08232 
變頻器能否驅(qū)動伺服電機
2023-12-12 07:50:37
一臺伺服電機1FK6,換了軸承,但是連上伺服驅(qū)動器master driver (6se7),就報警F023(變頻器超溫),求教應(yīng)怎樣處理?
2023-12-11 07:06:21
我們公司伺服電機出了一次十分奇怪的故障:使用伺服電機的是上引爐的牽引電機。
該電機突然報編碼器通訊故障,無法復(fù)位。當(dāng)斷電重啟后,伺服驅(qū)動器恢復(fù)正常,但當(dāng)其工作十幾分鐘后又出現(xiàn)該故障。檢查線路以及
2023-12-11 06:18:07
和用途。本文將詳細介紹變頻器和伺服驅(qū)動器的區(qū)別,并從工作原理、控制方式、適用范圍等多個方面進行比較,以幫助讀者更好地了解它們。 一、工作原理 1. 變頻器:變頻器通過改變電源電頻,即交流電的頻率,進而改變電機的轉(zhuǎn)速。它采用先將輸入電源直接轉(zhuǎn)換為直流電,再通過逆變器將
2023-12-07 15:48:372045 驅(qū)動器是電機控制系統(tǒng)中至關(guān)重要的一部分,它負責(zé)將控制信號轉(zhuǎn)化為電能輸出,驅(qū)動電機正常運行。根據(jù)電機的不同類型和應(yīng)用場景,驅(qū)動器可以分為有刷電機驅(qū)動器、無刷電機驅(qū)動器、步進電機驅(qū)動器和伺服電機驅(qū)動器。
2023-12-07 15:22:55847 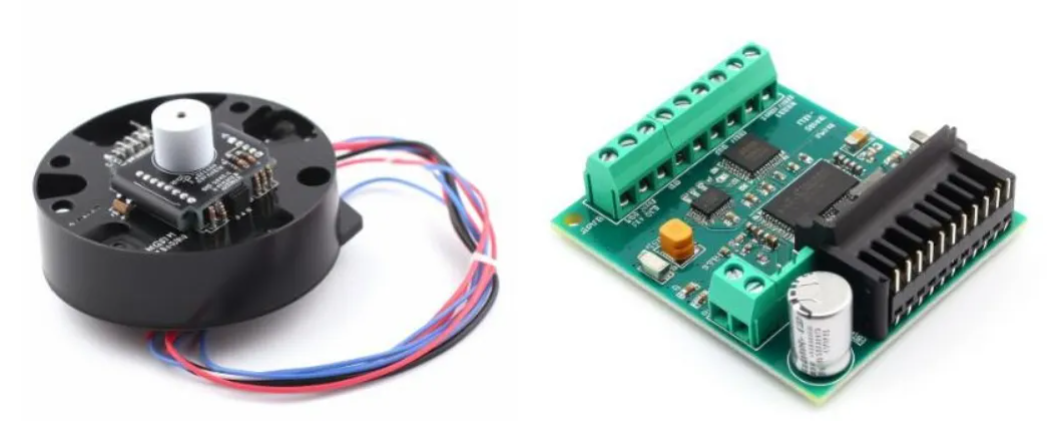
力士樂伺服驅(qū)動器維修故障代碼解釋及對策
2023-11-23 16:03:501866 西門子伺服驅(qū)動器維修的一些基本知識
2023-11-23 10:55:17670 ,但是加上閉環(huán)控制系統(tǒng)就可以稱之為伺服系統(tǒng)中的電機。 伺服電機是在伺服系統(tǒng)中控制機械元件運轉(zhuǎn)的電動機,它搭配上驅(qū)動器,形成一個完整的伺服系統(tǒng),就能夠精準(zhǔn)地控制速度、位置等。伺服電機具有線性度高、起動轉(zhuǎn)矩大、運行范
2023-11-16 16:13:33284 步進電機驅(qū)動器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。當(dāng)步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度,這個固定的角度被稱為“步距角”。步進電機不能直接接到直流或交流電
2023-11-14 08:07:32926 
各位大俠:
如果有多臺伺服電機,能不能用1臺驅(qū)動器帶動起來?這多臺伺服電機動作不一致,各自動作各自的。
2023-11-14 07:16:08
伺服電機控制一個排線收卷裝置,不知道是不是排線交接地方帶電的原因,操作工說一到交接的地方伺服電機就會馬上停止下來,而伺服驅(qū)動器是直接斷電了,伺服驅(qū)動器也接地了,不知道怎么解決,想問一下大家
2023-11-14 07:02:16
最近一批客供設(shè)備用的ACS驅(qū)動器和PARKER的驅(qū)動器,設(shè)備進廠后檢查電機發(fā)現(xiàn)電機的額定電壓如下圖所示DC170V,而驅(qū)動器最多只支持80V,現(xiàn)在驅(qū)動器使用的是24VDC的電源。針對于這種情況,你們
2023-11-13 06:58:22
伺服驅(qū)動器故障維修方法有哪些?
2023-10-27 09:35:341173 伺服控制1、交流伺服電機的工作原理伺服電機內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時電機自帶的編碼器反饋信號給驅(qū)動器,驅(qū)動器根據(jù)反饋值與目標(biāo)值進行比較
2023-10-27 08:07:40462 可以通過串口直接控制步進電機驅(qū)動器嗎
2023-10-18 07:20:07
是通過位置、速度和力矩三種方式對伺服電機進行控制,實現(xiàn)高精度的傳動系統(tǒng)定位,是傳動技術(shù)的高端產(chǎn)品。主流的伺服驅(qū)動器均采用數(shù)字信號處理器(DSP)作為控制核心,可以
2023-10-11 08:07:531082 步進電機的半步驅(qū)動是由驅(qū)動器來設(shè)置的嗎
2023-10-11 06:52:18
伺服驅(qū)動器中可以集成多少種電機驅(qū)動控制電路?
2023-10-08 07:07:48
如何防止電子變壓器弄壞伺服驅(qū)動器?? 伺服驅(qū)動器是一種高級調(diào)速驅(qū)動器,其主要功能是將電機的轉(zhuǎn)速和轉(zhuǎn)矩從控制信號中高精度地轉(zhuǎn)換成相應(yīng)的電信號,以實現(xiàn)精密控制。伺服驅(qū)動器在機器人、自動化設(shè)備、數(shù)控機床
2023-09-25 17:47:58488 在很多地方都會用到驅(qū)動器,但是驅(qū)動器是個整體的概念,簡單的說驅(qū)動器是驅(qū)動某類設(shè)備的驅(qū)動硬件。比如說電腦以及其他的工業(yè)設(shè)備或者是工具上,都會用到驅(qū)動器。本文重點介紹下驅(qū)動器是什么,以及電機驅(qū)動器是什么。
2023-09-18 10:00:291447 工作原理 目前主流的伺服驅(qū)動器均采用數(shù)字信號處理器(DSP)作為控制核心, 伺服驅(qū)動器(圖1) 可以實現(xiàn)比較復(fù)雜的控制算法,實現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)為核心
2023-09-14 14:49:56463 
三菱伺服驅(qū)動器可能因操作不當(dāng)或設(shè)備故障而停止工作。此時,應(yīng)根據(jù)三菱伺服驅(qū)動報警代碼確認(rèn)故障原因。三菱伺服驅(qū)動器常見報警代碼及解決辦法?一、三菱伺服系統(tǒng)主要采用三個系列
2023-09-11 08:08:3621606 作為一種控制器,伺服驅(qū)動器常用于控制伺服電機,在需要高精度的定位系統(tǒng)中,伺服驅(qū)動器是伺服系統(tǒng)中很重要的一部分。今天介紹的是在自動化應(yīng)用中,伺服驅(qū)動器常見的一些故障以及處理方式。
2023-09-09 10:48:081583 伺服驅(qū)動器的特點1、伺服驅(qū)動器軟件程序主要包括主程序、中斷服務(wù)程序、數(shù)據(jù)交換程序。2、伺服驅(qū)動器主程序主要用來完成系統(tǒng)的初始化、LO接口控制信號、DSP內(nèi)各個控制模塊寄存器的設(shè)置等。3、伺服驅(qū)動器
2023-09-05 08:09:08881 在現(xiàn)代工業(yè)領(lǐng)域,伺服驅(qū)動器是一種關(guān)鍵的電氣裝置,它在機器控制和運動控制系統(tǒng)中發(fā)揮著至關(guān)重要的作用。無論是工業(yè)機器人、數(shù)控機床還是自動化生產(chǎn)線,伺服驅(qū)動器都是實現(xiàn)精準(zhǔn)位置控制和高效運動控制的關(guān)鍵組件。本文將介紹伺服驅(qū)動器的工作原理、應(yīng)用領(lǐng)域以及在現(xiàn)代工業(yè)中的重要作用。
2023-08-21 17:34:022329 常見伺服故障及處理主要介紹伺服驅(qū)動器故障信息的讀取及其原因和解決措施。??
2023-08-21 10:23:06 5
5 工作原理 目前主流的伺服驅(qū)動器均采用數(shù)字信號處理器(DSP)作為控制核心, 伺服驅(qū)動器(圖1) 可以實現(xiàn)比較復(fù)雜的控制算法,實現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)為核心
2023-08-14 14:53:24455 BLDC驅(qū)動器將驅(qū)動電機轉(zhuǎn)軸上的三個相線命名為A相、B相和C相。電機接線一般包括連接驅(qū)動器的A相、B相和C相線與電機的相應(yīng)相線。
2023-08-03 14:24:471749 運行和監(jiān)控:一旦驅(qū)動器被使能,它會根據(jù)控制信號控制電機的運動。通過監(jiān)控驅(qū)動器的狀態(tài)和反饋信號,可以實時了解電機的位置、速度和力矩等參數(shù)。
2023-07-14 11:33:43799 向電機線圈供應(yīng)電壓和電流,然后通過監(jiān)控反饋來關(guān)閉伺服環(huán)路,從而為伺服電機供電。大多數(shù)情況下,伺服驅(qū)動器含有三個嵌入式伺服環(huán)路,即電流(或扭矩)環(huán)、速度環(huán)和位置環(huán);三個環(huán)路相互作用以實現(xiàn)精準(zhǔn)的運動控制。需要哪些環(huán)路
2023-07-10 10:02:25982 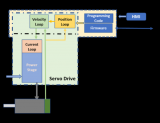
ABB?通過提供 E530?伺服驅(qū)動器和 DSM?伺服電機的產(chǎn)品組合,提供整體伺服系統(tǒng)解決方案。E530?伺服驅(qū)動器是一款通用型伺服驅(qū)動器,其工作電壓為交流單 /三相 200 V ~ 240
2023-06-27 10:41:34440 
當(dāng)驅(qū)動器將電流送到電機時,電機立即產(chǎn)生扭矩;一開始,由于V形帶會有彈性,負載不會加速到像電機那樣快;伺服電機會比負載提前到達設(shè)定的速度,此時裝在電機上的偏碼器會削弱電流,繼而削弱扭矩;隨著V型帶張力的不斷增加會使電機速度變慢,此時驅(qū)動器又會去增加電流,周而復(fù)始。
2023-06-26 18:40:04208 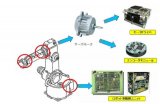
電動伺服系統(tǒng)的一般結(jié)構(gòu)為三個閉環(huán)控制,即電流環(huán)、速度環(huán)和位置環(huán)。一般情況下,對于交流伺服驅(qū)動器,可通過對其內(nèi)部功能參數(shù)進行人工設(shè)定而實現(xiàn)位置控制、速度控制、轉(zhuǎn)矩控制等多種功能。那么關(guān)于伺服電機有哪些需要知道的呢?
2023-06-26 10:13:17325 作為現(xiàn)代工業(yè)運動控制的重要組成部分,低壓伺服驅(qū)動器通過力矩、速度、位置三種方式對伺服電機進行精準(zhǔn)控制,被廣泛應(yīng)用于低壓供電場合、定位控制、移動供電場合等安裝空間小、用電安全高的自動化應(yīng)用場
2023-06-20 11:28:56297 
作為現(xiàn)代工業(yè)運動控制的重要組成部分,低壓伺服驅(qū)動器通過力矩、速度、位置三種方式對伺服電機進行精準(zhǔn)控制
2023-06-19 16:45:38448 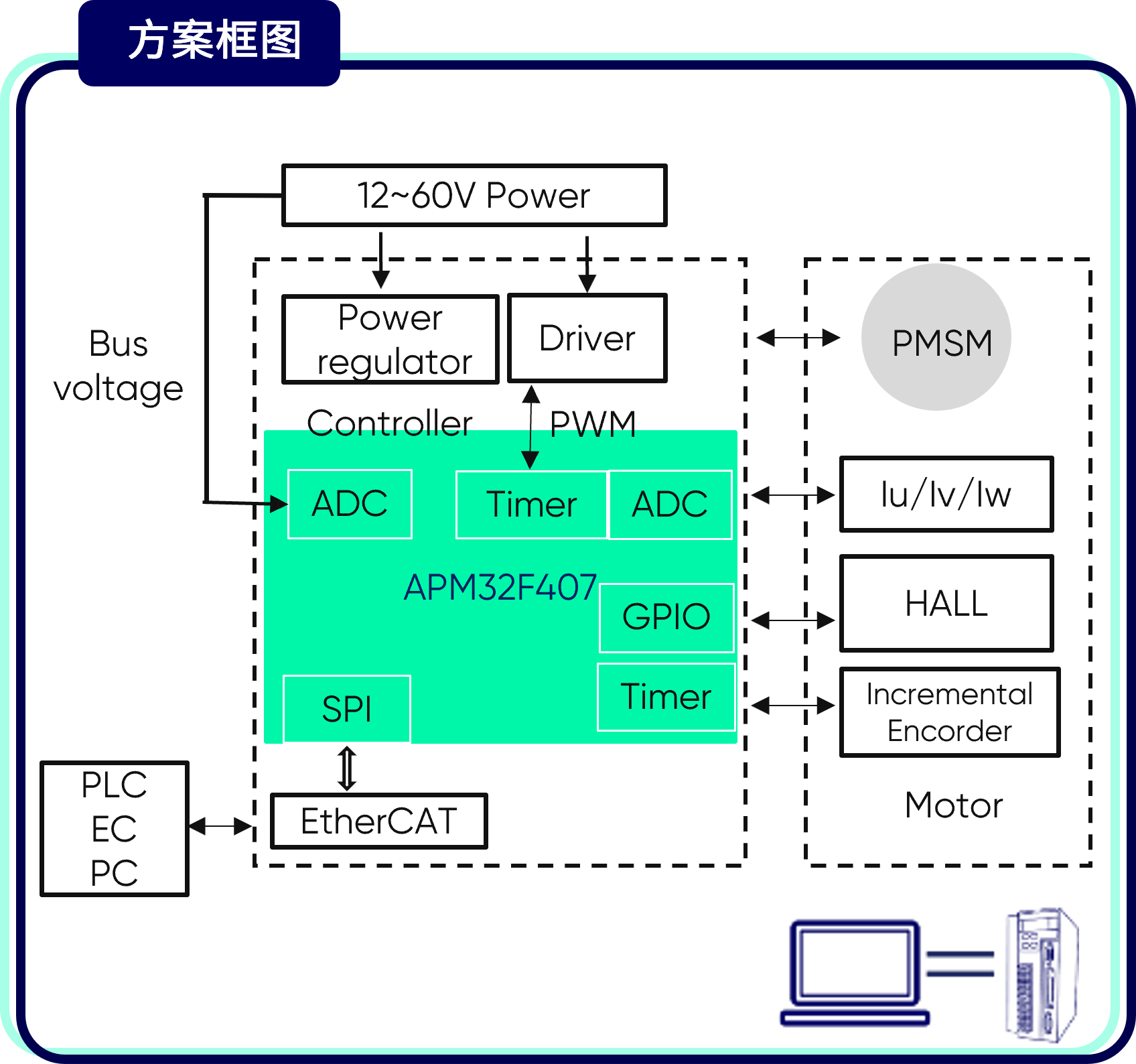
伺服電機驅(qū)動器是能被工業(yè)機器人及數(shù)控加工中心等自動化設(shè)備廣泛應(yīng)用的產(chǎn)品,它是屬于伺服系統(tǒng)的一部分,能應(yīng)用于高精度的定位系統(tǒng)。
2023-06-18 17:43:21217 
驅(qū)動器電路發(fā)揮作用的地方,該電路使用IC555來執(zhí)行這項工作。通讀本教程以更好地了解伺服電機及其工作原理。
2023-06-18 11:11:15525 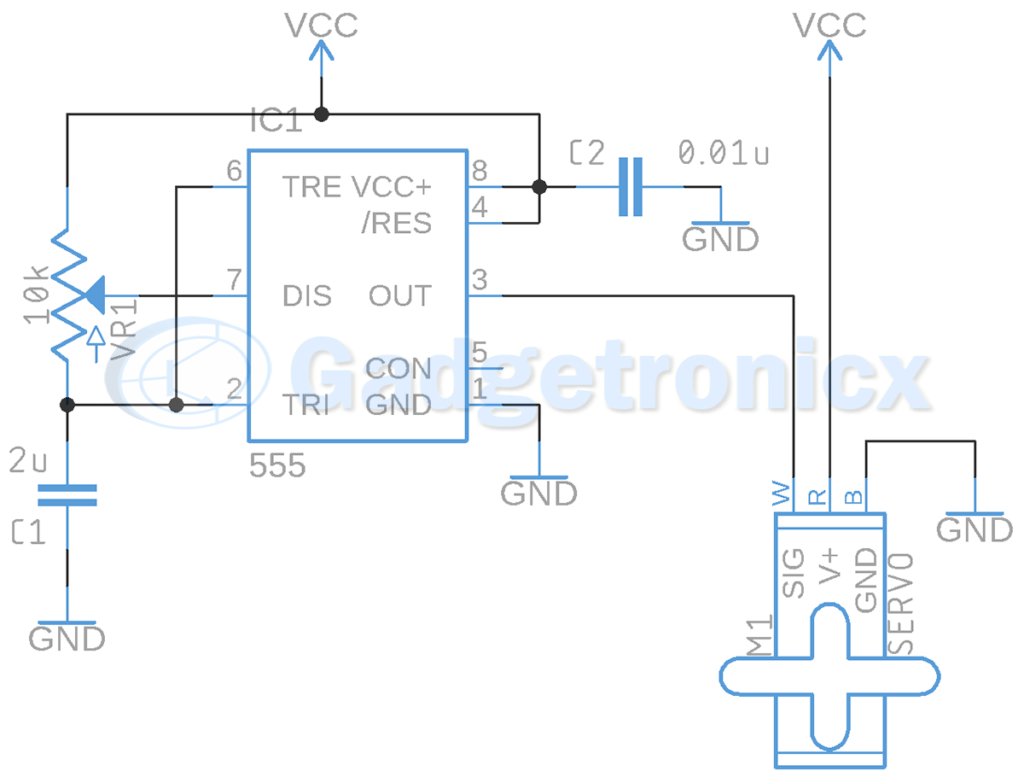
,同時電機自帶的編碼器反饋信號給驅(qū)動器,驅(qū)動器根據(jù)反饋值與目標(biāo)值進行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動的角度。伺服電機的精度決定于編碼器的精度(線數(shù))也就是說伺服電機本身具備發(fā)出脈沖的功能,它每旋轉(zhuǎn)一個角度,都會發(fā)出對應(yīng)數(shù)量的脈沖,這樣伺服驅(qū)動器和伺服電機編碼器的脈沖形成了呼應(yīng),所以它是閉環(huán)控制,步進電機是開環(huán)控制。
2023-06-13 11:18:391338 電動伺服系統(tǒng)的一般結(jié)構(gòu)為三個閉環(huán)控制,即電流環(huán)、速度環(huán)和位置環(huán)。一般情況下,對于交流伺服驅(qū)動器,可通過對其內(nèi)部功能參數(shù)進行人工設(shè)定而實現(xiàn)位置控制、速度控制、轉(zhuǎn)矩控制等多種功能。那么關(guān)于伺服電機
2023-06-08 09:50:21641 對伺服驅(qū)動器來說,最高可以接收500KHz的脈沖(差動輸入),集電極輸入是200KHz。電機輸出的力矩由負載決定,負載越大電機輸出的力矩越大,當(dāng)然不能超出電機的額定負載。急劇的加減速或者過載而造成
2023-05-24 10:18:554668 從宏觀上看,伺服驅(qū)動器主要分為功率板和控制板兩大塊,其中功率板是強電部分,控制板屬于弱點部分。 功率板又可以細分為兩個單元,即功率驅(qū)動單元IPM和開關(guān)電源單元。 這里面,功率驅(qū)動單元用于電機的驅(qū)動
2023-05-23 07:35:021658 伺服驅(qū)動器是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統(tǒng)的一部分主要應(yīng)用于高精度的定位系統(tǒng)。
2023-05-19 10:40:291635 伺服驅(qū)動器(servo drives)又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服系統(tǒng)的一部分,主要應(yīng)用于高精度的定位系統(tǒng)
2023-05-18 10:45:25458 主流的伺服驅(qū)動器均采用數(shù)字信號處理器(DSP)作為控制核心,可以實現(xiàn)比較復(fù)雜的控制算法,實現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。功率器件普遍采用以智能功率模塊(IPM)為核心設(shè)計的驅(qū)動電路,IPM內(nèi)部集成了驅(qū)動
2023-05-17 10:33:13561 對伺服驅(qū)動器來說,最高可以接收500KHz的脈沖(差動輸入)集電極輸入是200KHz。電機輸出的力矩由負載決定,負載越大電機輸出的力矩越大,當(dāng)然不能超出電機的額定負載。急劇的加減速或者過載而造成
2023-05-17 10:07:4813104 伺服驅(qū)動器在控制信號的作用下驅(qū)動執(zhí)行電機,因此驅(qū)動器是否能正常工作直接影響設(shè)備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動器相當(dāng)于大腦,執(zhí)行電機相當(dāng)于手腳。
而伺服驅(qū)動器在伺服控制系統(tǒng)中的作用就是調(diào)節(jié)電機的轉(zhuǎn)速,因此也是一個自動調(diào)速系統(tǒng)。
2023-05-17 10:05:122908 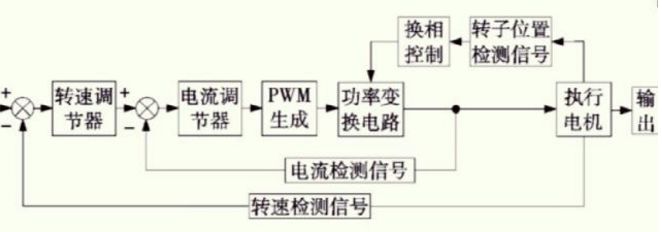
伺服驅(qū)動器是現(xiàn)代運動控制的重要組成部分,被廣泛應(yīng)用于工業(yè)機器人及數(shù)控加工中心等自動化設(shè)備中。尤其是應(yīng)用于控制交流永磁同步電機的伺服驅(qū)動器已經(jīng)成為國內(nèi)外研究熱點。當(dāng)前交流伺服驅(qū)動器設(shè)計中普遍采用
2023-05-17 10:04:201055 電機和驅(qū)動器簡介一般性區(qū)別:有刷電機一般只需兩根接線端子就可以驅(qū)動,而無刷電機需要三根接線端子進行驅(qū)動。
2023-05-16 14:54:2732 伺服驅(qū)動器在控制信號的作用下驅(qū)動執(zhí)行電機,因此驅(qū)動器是否能正常工作直接影響設(shè)備的整體性能。在伺服控制系統(tǒng)中,伺服驅(qū)動器相當(dāng)于大腦,執(zhí)行電機相當(dāng)于手腳。而伺服驅(qū)動器在伺服控制系統(tǒng)中的作用就是調(diào)節(jié)電機的轉(zhuǎn)速,因此也是一個自動調(diào)速系統(tǒng)。
2023-05-09 14:54:5615650 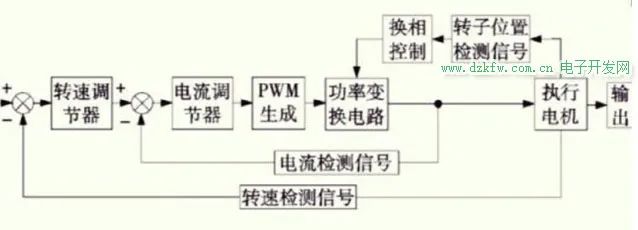
伺服驅(qū)動電機,簡稱伺服電機,是在普通電機的基礎(chǔ)上集成編碼器的產(chǎn)物。
2023-05-08 09:55:13458 伺服的基本概念是準(zhǔn)確、精確、快速定位。變頻是伺服控制的一個必須的內(nèi)部環(huán)節(jié),伺服驅(qū)動器中同樣存在變頻(要進行無級調(diào)速)。
2023-05-06 10:12:31459 
手上有一個伺服電機(松下MHMF042L1U2M),一個電機驅(qū)動器(松下MBDLT25SF200V)。如下圖:驅(qū)動器介紹:驅(qū)動器組成部分 驅(qū)動器命名電機介紹:電機組成部分 電機命名 硬件分析:電機
2023-05-05 11:36:140 獨立式伺服驅(qū)動器 C3S063V2F12I21T30M11 C3S063V2獨立式伺服驅(qū)動器的額定功率為2.5kVA,具有可擴展的技術(shù)功能 - 從具有電子CAM和PLCOpen功能模塊的智能IEC
2023-04-24 15:40:45323 泰科伺服生產(chǎn)的MT無刷伺服系統(tǒng)主要由IDM系列伺服驅(qū)動器與兼容NEMA法蘭尺寸的直流無刷伺服電機組合而成。采用直流供電,最大功率可達600W,主要應(yīng)用于小型移動機器人、自動化檢測組裝、醫(yī)療設(shè)備等行業(yè)
2023-04-20 10:45:52
【簡介】 APX系列可編程精密伺服驅(qū)動器是一款通用、高性能、交/直流供電、結(jié)構(gòu)緊湊的全數(shù)字伺服驅(qū)動器
2023-04-20 10:21:24
APXS 系列可編程精密伺服驅(qū)動器是一款通用、高性能、交/直流供電、結(jié)構(gòu)緊湊的全數(shù)字伺服驅(qū)動器,最大功率可達1KW。集可編程運動控制、PLC、伺服驅(qū)動功能于一體。主要應(yīng)用于直線(DDL)、力矩
2023-04-20 09:57:49
: 伺服驅(qū)動器系列ADM系列精密可編程直流伺服驅(qū)動模塊驅(qū)動電機直線(DDL)、力矩(DDR)、音圈、有刷、無刷電機控制模式運動序列、點到點、PVT&nbs
2023-04-20 09:20:46
RDM協(xié)作機器人關(guān)節(jié)伺服驅(qū)動模塊是一款基于FPGA 先進技術(shù)開發(fā)而成的高性能、直流供電、結(jié)構(gòu)極其緊湊的全數(shù)字通用伺服驅(qū)動器,最大功率可達 1000W。通過EtherCAT/CANopen 總線控制
2023-04-19 15:39:40
RDM協(xié)作機器人關(guān)節(jié)伺服驅(qū)動模塊是一款基于FPGA 先進技術(shù)開發(fā)而成的高性能、直流供電、結(jié)構(gòu)極其緊湊的全數(shù)字通用伺服驅(qū)動器,最大功率可達 1000W。通過EtherCAT/CANopen
2023-04-17 18:13:06
伺服驅(qū)動器(servo drives)又稱為"伺服控制器"、"伺服放大器",是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于普通交流馬達,屬于伺服
2023-04-13 16:48:511316 伺服驅(qū)動器是用來驅(qū)動[伺服電機]的,伺服電機可以是步進電機,也可以是交流異步電機,主要為了實現(xiàn)快速、精確定位,像那種走走停停、精度要求很高的場合用的很多。伺服驅(qū)動器和電機 變頻器是利用電力半導(dǎo)體器件
2023-04-10 10:55:442 伺服驅(qū)動器是現(xiàn)代運動控制的重要組成部分,被廣泛應(yīng)用于工業(yè)機器人及數(shù)控加工中心等自動化設(shè)備中。尤其是應(yīng)用于控制交流永磁同步電機的伺服驅(qū)動器已經(jīng)成為國內(nèi)外研究熱點。當(dāng)前交流伺服驅(qū)動器設(shè)計中普遍采用
2023-04-04 09:55:148063 
伺服驅(qū)動器是一種電子設(shè)備,它通過向伺服電機提供適當(dāng)?shù)男盘柨刂破滢D(zhuǎn)動,從而實現(xiàn)對控制工件位置、速度、加速度等多種運動參數(shù)的精確控制。它廣泛應(yīng)用于工業(yè)生產(chǎn)自動化領(lǐng)域的運動控制系統(tǒng)中,比如橡膠、塑料、紙張、印刷、包裝、木工、石材、玻璃、金屬、電子等產(chǎn)業(yè)中。
2023-03-31 18:02:071711 DC伺服電機UVW相可以不加驅(qū)動器改成直接由DC電源驅(qū)動嗎?
2023-03-30 17:26:52
請問怎樣用一個脈沖(信號的一開一關(guān))來從伺服驅(qū)動器位置控制上使伺服電機旋轉(zhuǎn)呢?
2023-03-30 17:21:51
伺服的驅(qū)動器,驅(qū)動器再驅(qū)動電機轉(zhuǎn)子進行運動。這種控制方式比較適合內(nèi)容比較簡單的項目,單軸運動什么的。如果是多軸控制等內(nèi)容復(fù)雜的項目,就愛莫能助了。 總線控制是利用工業(yè)現(xiàn)場總線連接PLC通訊口與伺服的驅(qū)動器,驅(qū)動器驅(qū)動電機
2023-03-28 10:55:021628 步進電機和伺服電機哪個好,這個沒有絕對的答案,適合的才是最好的!下面從步進電機和伺服電機各種的優(yōu)缺點、性能特點
進行分析:
步進電機是一種感應(yīng)電機,它的工作原理是利用電子電路,將直流電變成
2023-03-23 11:07:324
 電子發(fā)燒友App
電子發(fā)燒友App
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論