 電子發(fā)燒友App
電子發(fā)燒友App


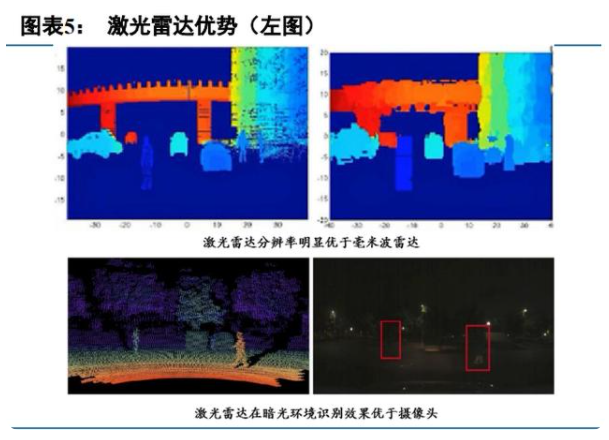
目前多類傳感器融合感知路線已成為絕大多數(shù)廠家共識,激光雷達(dá)通過發(fā)射激光來測量物體與傳感器之間精確距離,具有測距遠(yuǎn)、受環(huán)境光照影響小等特點,可彌補(bǔ)攝像頭和毫米波雷達(dá)的缺陷,顯著提升自動駕駛系統(tǒng)安全性,被眾多車廠認(rèn)為是高級別自動駕駛方案中必備的傳感器。
隨著芯片短缺逐步緩解和汽車智能化滲透率提升,2022年智能網(wǎng)聯(lián)汽車細(xì)分領(lǐng)域有望進(jìn)入量產(chǎn)元年。激光雷達(dá)方面:遵循“性能優(yōu)化+降本增效+下游需求旺盛“三大邏輯,前裝量產(chǎn)元年將至。測距方式ToF發(fā)展成熟,F(xiàn)MCW有望與ToF并存,掃描方式短期內(nèi)混合固態(tài)式有望前裝量產(chǎn),長期將從機(jī)械式向固態(tài)式演化。華為、大疆入局助推激光雷達(dá)降本增效,規(guī)模經(jīng)濟(jì)逐漸顯現(xiàn),未來激光雷達(dá)價格有望下探至商業(yè)化量產(chǎn)上車水平。
短期應(yīng)用以半固態(tài)為核心的技術(shù)組合為主,未來向固態(tài)式方向發(fā)展 技術(shù)發(fā)展路線多元化
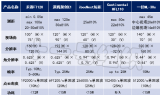
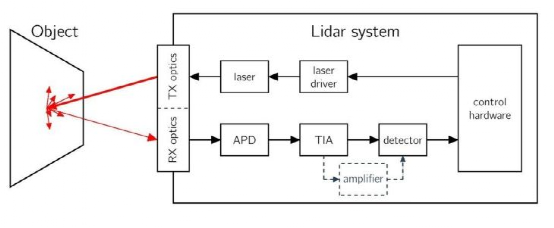
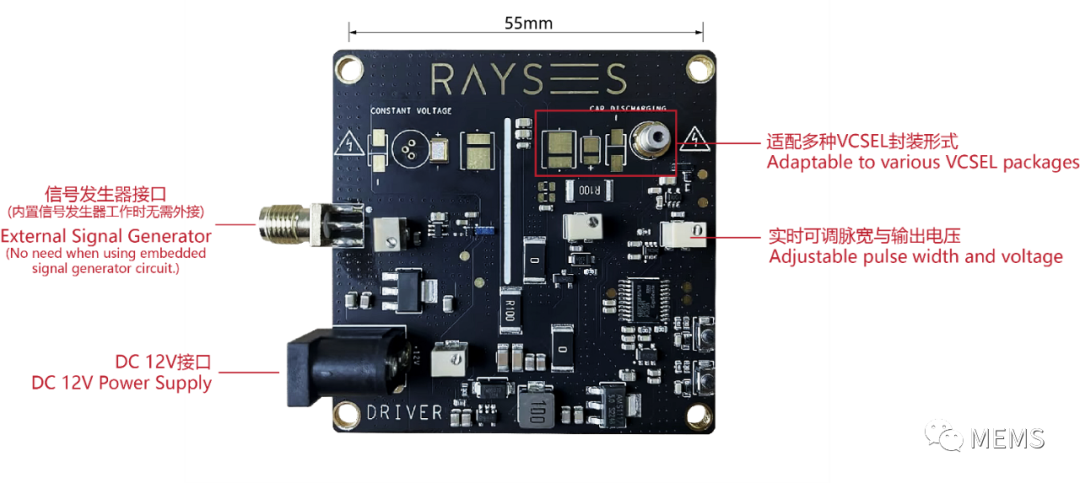
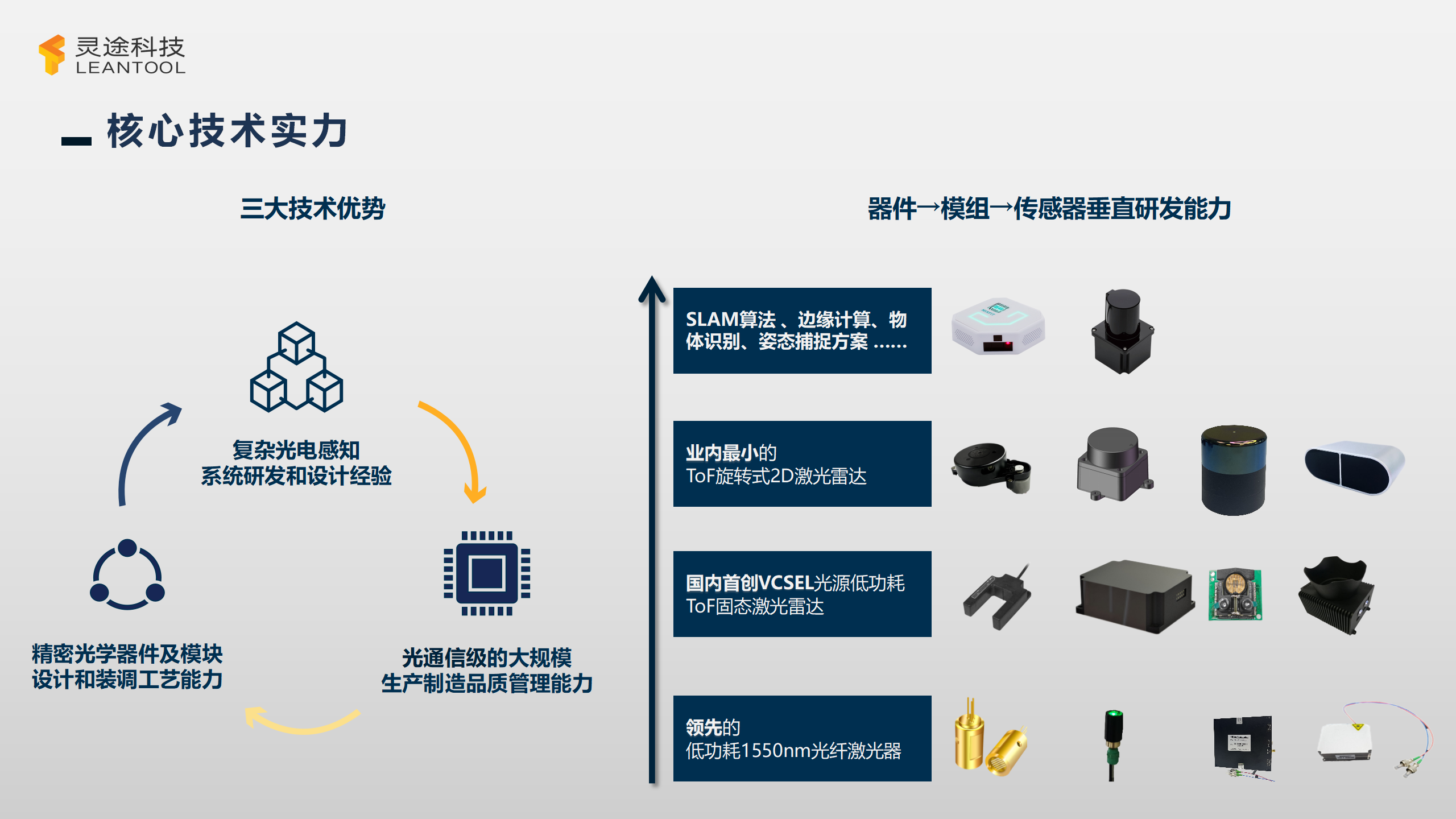
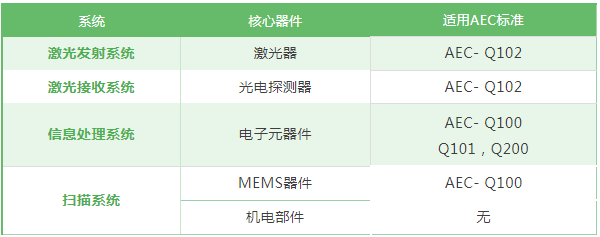
激光雷達(dá)掃描系統(tǒng)、激光器、探測器和整體測距原理均存在不同技術(shù)路線,導(dǎo)致總體技術(shù)路線繁多。掃描系統(tǒng)方面,機(jī)械式乘用車搭載概率低,主要瞄準(zhǔn) Robotaxi/Robotruck 市場;半固態(tài)式已跨越車規(guī),開啟規(guī)模化應(yīng)用;未來純固態(tài)式(Flash、OPA)高度集成化,更具成本優(yōu)勢。激光器因半固態(tài)上量,短期將以 EEL 應(yīng)用為主,未來向VCSEL 陣列和光纖激光器的轉(zhuǎn)換進(jìn)程取決于固態(tài)式、1550nm 和FMCW 測 距 技 術(shù) 發(fā) 展 。 探 測 器 則 逐 步 采 取 高 增 益陣 列 結(jié) 構(gòu)(SPPC/SiPM)加強(qiáng)遠(yuǎn)距探測能力。
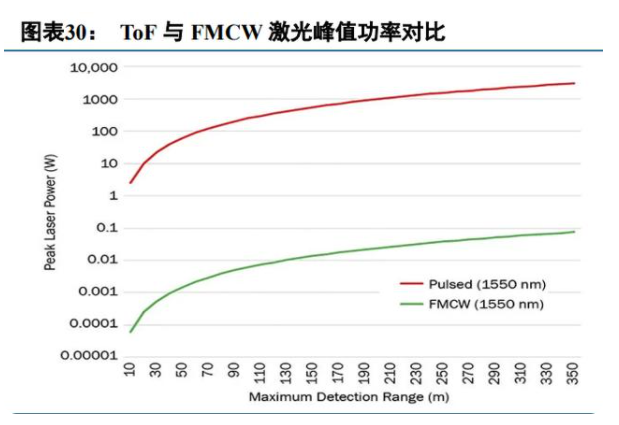
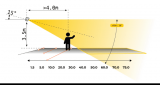
測距原理方面,ToF 為當(dāng)前市場主流,F(xiàn)MCW 大多處于原型機(jī)狀態(tài),但性能優(yōu)勢明顯,發(fā)展?jié)摿薮蟆\囕d激光雷達(dá)測距方法主要為 ToF(飛行時間)、FMCW (調(diào)頻連續(xù)波),能夠?qū)崿F(xiàn)室外陽光下較遠(yuǎn)的測程(>100m)。ToF 原理是通過測量發(fā)射激光脈沖信號和反射信號的時間差來計算距離,在車載激光雷達(dá)上發(fā)展相當(dāng)成熟,是多數(shù)廠商的選擇。FMCW 發(fā)射連續(xù)激光而非脈沖, 其原理是將發(fā)射激光的光頻進(jìn)行線性調(diào)制,通過回波信號與參考光進(jìn)行相干拍頻得到頻率差,從而間接獲得飛 行時間反推目標(biāo)物距。
FMCW 性能理論優(yōu)勢明顯,車規(guī)量產(chǎn)尚待時日。FMCW 能夠解決 ToF 對背景輻射的抵抗力低,多用戶干 擾以及缺乏瞬時速度信息的缺點。FMCW 的信噪比高于 ToF,相同最大探測距離下所需激光的峰值功率約為 ToF 的 1/10000,因此對人眼更加安全。當(dāng)前市場 FMCW 激光雷達(dá)大多處于概念機(jī)的階段,且根據(jù) Innoviz 路演說 明,F(xiàn)MCW 需用 1300nm-1550nm 波長,雖然可以使用低成本的 PD 探測器,但需用 InGaAs 材料制作,再考慮 到較 ToF 復(fù)雜的信號處理電路,接收系統(tǒng)整體成本較高;發(fā)射端低成本、大批量低相位噪聲的激光器制造也是 當(dāng)下難題,目前 Aeva、Mobileye 等公司在研發(fā) FMCW 激光雷達(dá),Mobileye 預(yù)計需要等到 2025 年以后才能量產(chǎn)。
具體來講,預(yù)計半固態(tài)+EEL+SPPC/SiPM 是近期乘用車激光雷達(dá)采取的主要組合,固態(tài)式方案下 Flash+VCSEL+SPPC/SiPM 與OPA+FMCW 具有較好發(fā)展前景。
高等級自動駕駛中激光雷達(dá)不可或缺多傳感器融合感知大勢所趨
自動駕駛智能化程度隨等級提高,L3 處于分水嶺。從 L0 級(純由駕駛員控制)至 L5 級(完全自動駕駛),級別越高,車輛的自動化程度越高,駕駛員參與越小,駕駛員的信息輸入交由更多車載 傳感器的獲取與處理來替代。盡管 Tesla 堅持純視覺自動駕駛方案,但從安全性角度,基于攝像頭的視覺方案在暗光、環(huán)境大光比以及雨水遮擋的情況下容易失效,且深度學(xué)習(xí)算法難避免長尾效應(yīng)。從商業(yè)角度,大多數(shù)廠商缺乏 Tesla的數(shù)據(jù)和算法積累,跟隨 Tesla 方案難免處于被動境地。目前多傳感器融合感知路線已成為絕大多數(shù)廠家共識,激光雷達(dá)通過發(fā)射激光來測量物體與傳感器之間精確距離,具有測距遠(yuǎn)、受環(huán)境光照影響小等特點,可彌補(bǔ)攝像頭和毫米波雷達(dá)的缺陷,顯著提升自動駕駛系統(tǒng)安全性,被眾多車廠認(rèn)為是高級別自動駕駛方案中必備的傳感器。激光雷達(dá)單車搭載量亦將隨自動駕駛等級同步上升,綜合第三方機(jī)構(gòu)預(yù)測,L3 至少需要 1 臺激光雷達(dá),L4 則需要 2-4 臺,L5 需 要 4 臺以上。
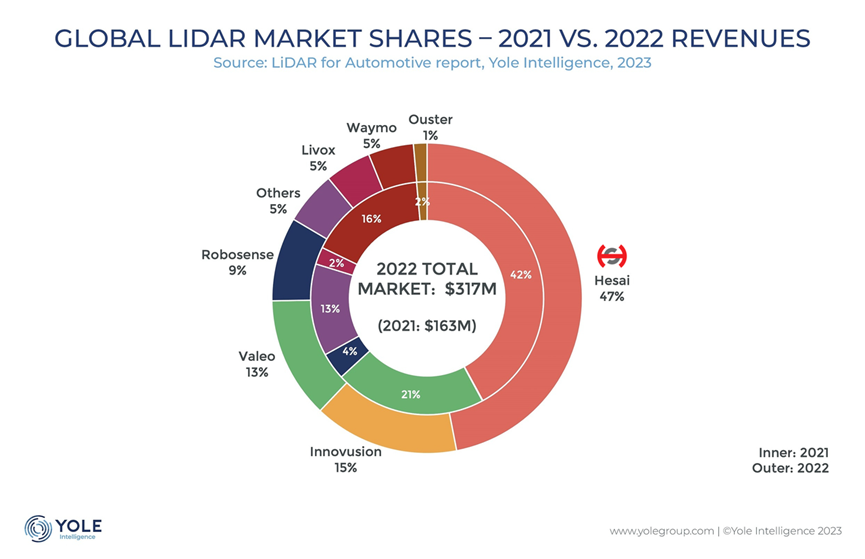
激光雷達(dá)市場處于爆發(fā)前夕,國內(nèi)市場發(fā)展有超越早先預(yù)期可能
審核編輯:符乾江











































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論