 電子發燒友App
電子發燒友App


內容回顧
回顧上節課程我們對運動控制+機器視覺的Demo的系統人機界面和主線程的框架進行了大致的介紹,接下來我們將對各個模塊的實現過程進行介紹,方便大家理解掌握。
今天我們將對系統機械參數的設置和配方文件的管理這兩大模塊進行介紹講解。
01開發環境介紹
一、硬件平臺

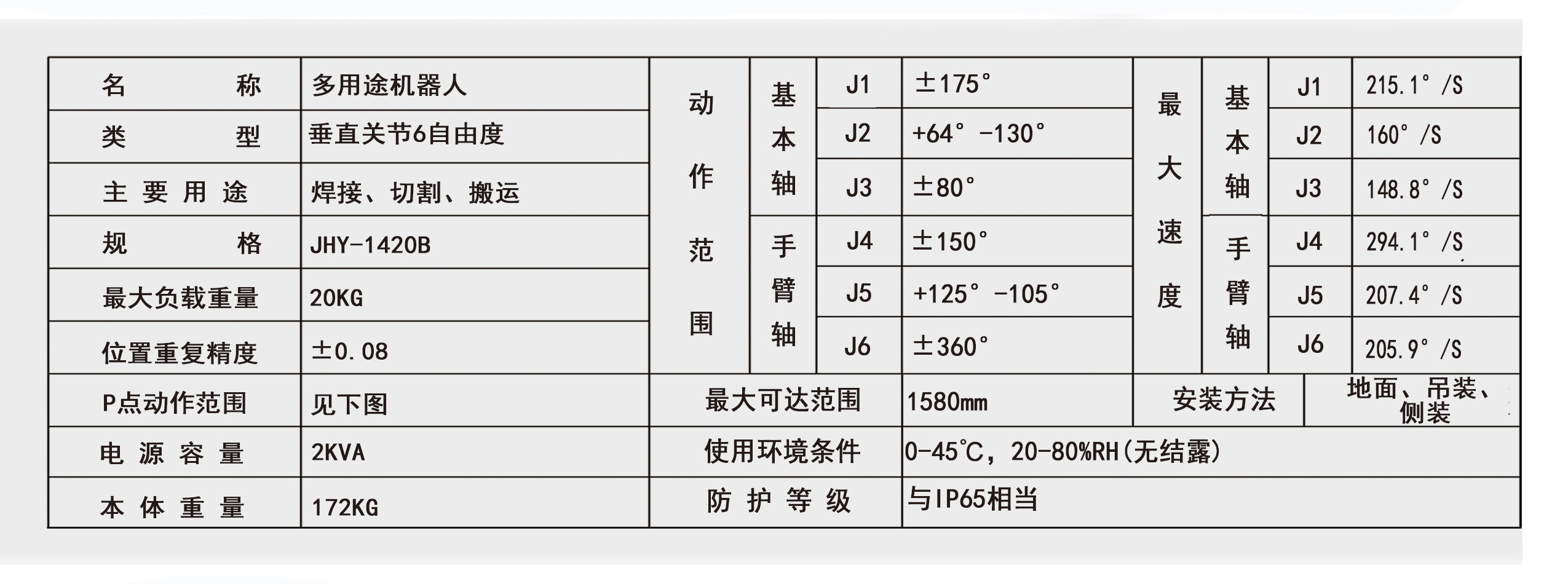
運動控制機器視覺實訓平臺,包括VPLC532視覺控制器、4個步進電機、相機、光源、光源控制器、帶HDMI接口的工業顯示屏等相關硬件配置。
二、軟件平臺
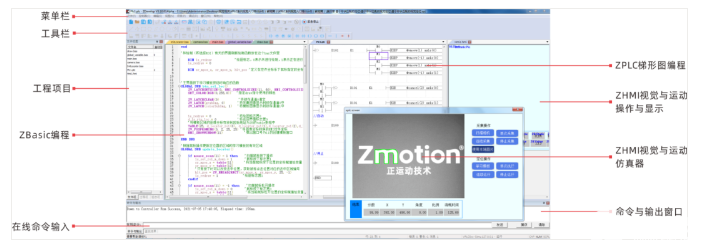
ZDevelop 是正運動技術ZMoiton系列運動控制器的PC端程序開發調試與診斷軟件,通過它用戶能夠直接對控制器進行程序編輯與配置,快速開發應用、實時診斷系統運行參數以及對運動控制。
ZDevelop支持三種編程方式,分別為ZBasic、ZPLC梯形圖、ZHMI組態,使用ZDevelop軟件編寫的程序可以下載到正運動控制器里,也可以下載到仿真器在PC平臺仿真運行。
02系統機械參數的設置與保存
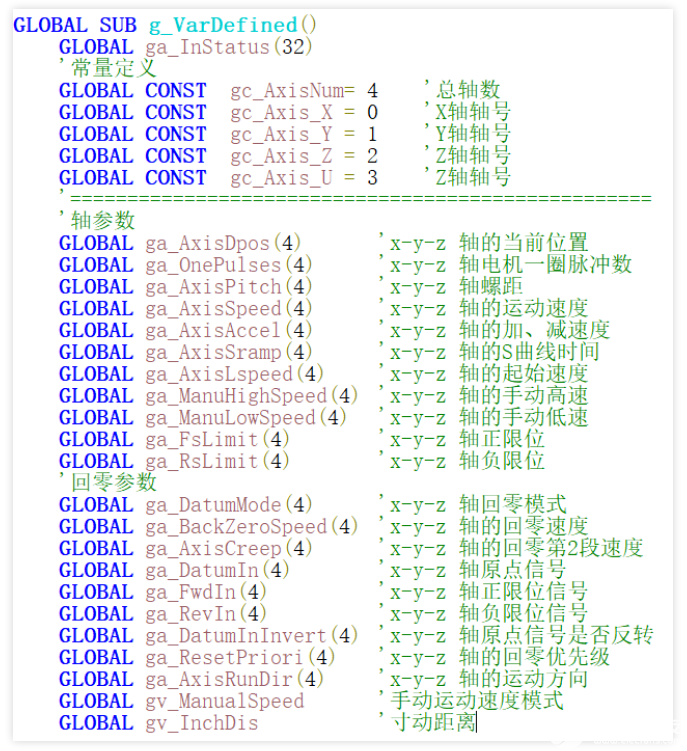
一、機械參數相關變量的定義
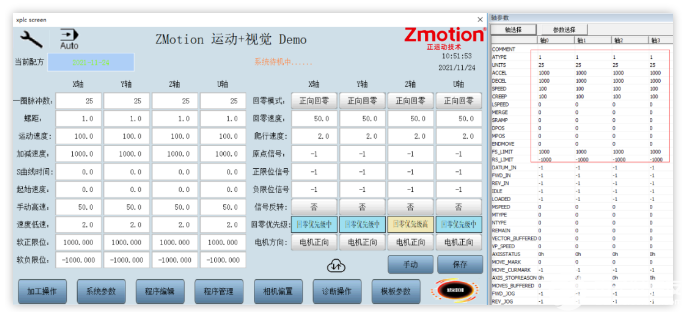
二、機械參數設置HMI界面設計
通過Hmi里面的值顯示和字狀態切換等元件完成以下界面的設計。

三、機械參數的保存與生效
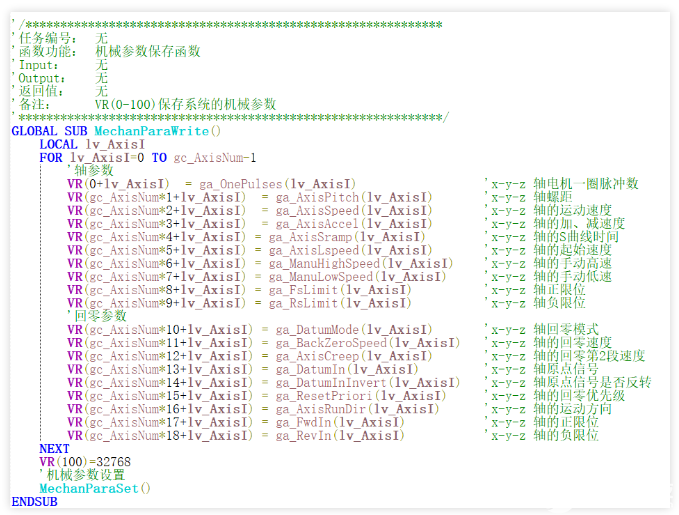
當點擊保存按鈕時調用函數 MechanParaWrite( ) ,將機械參數的保存到VR(0)-VR(100)實現掉電保存的目的。
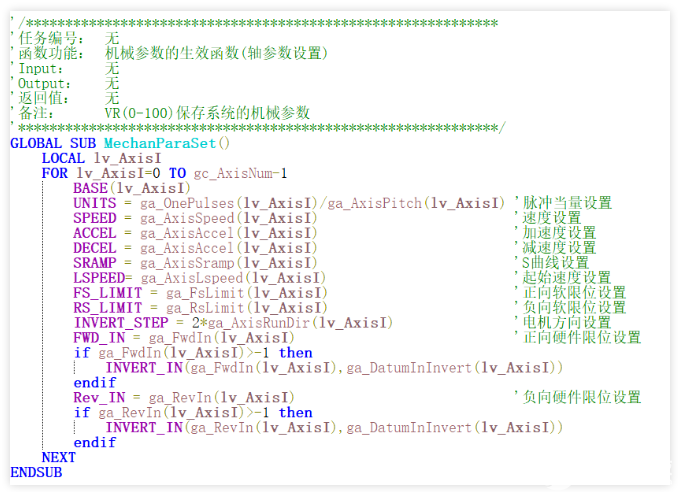
將機械參數保存到VR寄存器之后,然后調用函數 MechanParaSet() ,進行機械參數的生效。
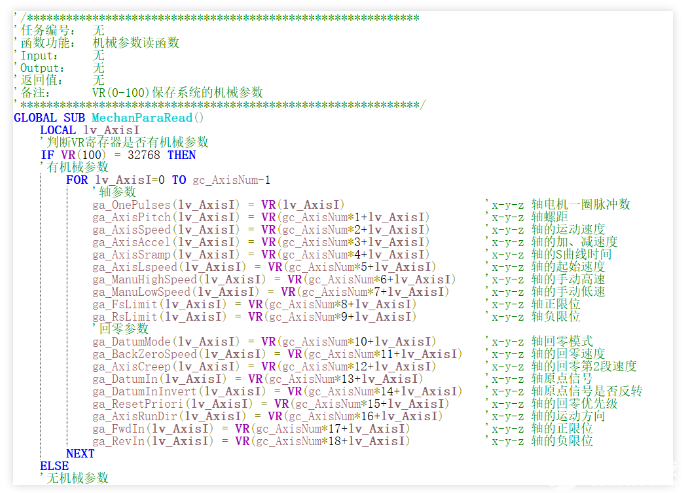
四、 系統重啟后讀取機械參數
在系統初始化函數 MainInit() 里面調用機械參數的讀取函數 MechanParaRead() 和機械參數的設置函數 MechanParaSet() ,實現機械參數的恢復。
五、 保存下載到控制器中調試效果
03配方文件的編輯與保存
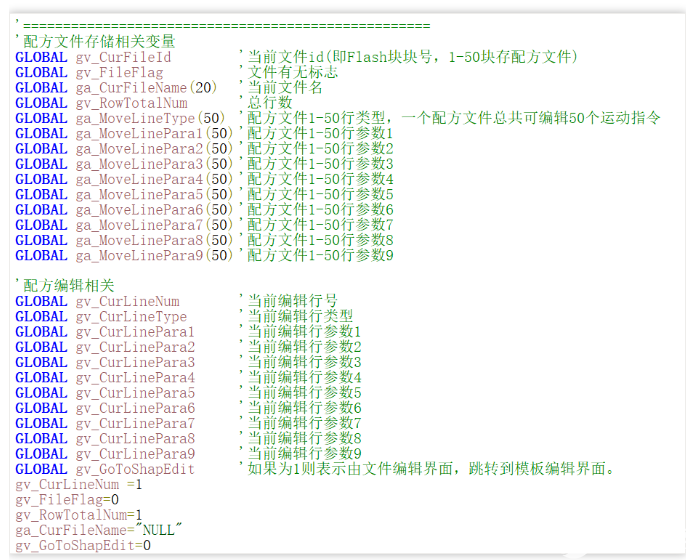
一、 配方文件相關變量的定義
二、 配方文件行類型規劃
1.空行
ga_MoveLineType =0 空行
2.單軸運動
ga_MoveLineType =1 單軸運動
g_MoveLinePara1: 軸選擇;
g_MoveLinePara2: 運動距離;
g_MoveLinePara3:0-相對運動/1-絕對運動;
g_MoveLinePara4:運動速度
3.三軸直線插補
ga_MoveLineType =2 三軸直線插補
g_MoveLinePara1: X軸運動距離;
g_MoveLinePara2: Y軸運動距離;
g_MoveLinePara3: Z軸運動距離;
g_MoveLinePara4:0-相對運動/1-絕對運動;
g_MoveLinePara5:插補和速度;
g_MoveLinePara6:0-針尖示教/1-相機示教
4.三點圓弧
ga_MoveLineType =3三點圓弧
g_MoveLinePara1: X軸中間點位置;
g_MoveLinePara2: Y軸中間點位置;
g_MoveLinePara3: X軸結束點位置;
g_MoveLinePara4: Y軸結束點位置;
g_MoveLinePara5:0-相對運動/1-絕對運動;
g_MoveLinePara6:插補合速度;
g_MoveLinePara7:0-針尖示教/1-相機示教
5.圓心圓弧
ga_MoveLineType =4圓心圓弧
g_MoveLinePara1: X軸終點位置;
g_MoveLinePara2: Y軸終點位置;
g_MoveLinePara3: X軸圓心位置;
g_MoveLinePara4: Y軸圓心位置;
g_MoveLinePara4:0-逆時針/1-順時針;
g_MoveLinePara6:0-相對運動/1-絕對運動;
g_MoveLinePara7:插補合速度;
g_MoveLinePara8:0-針尖示教/1-相機示教
6.輸出口設置
ga_MoveLineType =5輸出口輸出/復位;g_MoveLinePara1: 輸出口選擇;g_MoveLinePara2: 輸出口狀態;g_MoveLinePara3: N毫秒后對讀取輸出口狀態取反,0表示不取反;
7.輸入口檢測
ga_MoveLineType =6輸入口檢測;
g_MoveLinePara1: 輸入口選擇;
g_MoveLinePara2: 輸入口檢測狀態;
g_MoveLinePara3: 檢測超時時間(超過這個時間配方程序將停止并報警)
8.等待延時
ga_MoveLineType =7等待延時;
g_MoveLinePara1: 等待時間;
9.視覺糾偏1-單點匹配
ga_MoveLineType =8視覺糾偏1-單點匹配;
(g_MoveLinePara1,g_MoveLinePara2,g_MoveLinePara3) 糾偏拍照位(x,y,z)
(g_MoveLinePara4,g_MoveLinePara5,g_MoveLinePara6) 匹配到的基準坐標(x,y,角度)
g_MoveLinePara7,模板編號
g_MoveLinePara8,運動到拍照位的速度
10.視覺糾偏2-雙mark點匹配
ga_MoveLineType =9視覺糾偏2-雙mark點匹配;
(g_MoveLinePara1,g_MoveLinePara2,g_MoveLinePara3) 糾偏拍照位1(x1,y1,z)
(g_MoveLinePara4,g_MoveLinePara5,g_MoveLinePara3) 糾偏拍照位1(x2,y2,z)
(g_MoveLinePara6,g_MoveLinePara7,g_MoveLinePara8) 匹配到的基準坐標(x,y,角度)
g_MoveLinePara9 模板編號1+10*模板編號2+100*運動到拍照位的速度
11.連續插補
ga_MoveLineType =10連續插補;
g_MoveLinePara1: 0-關閉/1-打開連續插補;
12.拐角減速設置
ga_MoveLineType =11拐角減速設置;
g_MoveLinePara1: 0-關閉/1-打開拐角減速功能;
g_MoveLinePara2: 開始減速角度;
g_MoveLinePara3:結束減速角度;
g_MoveLinePara4:SP速度(等比減速用)
13.自動倒角功能
ga_MoveLineType =12自動倒角功能;
g_MoveLinePara1: 0-關閉/1-打開 自動倒角功能;
g_MoveLinePara2: 倒角半徑
三、 配方編輯HMI界面設計

實現點擊上一行、下一行實現當前編輯行行號的切換,點擊行類型實現當前編輯行行類型的選擇。
四、 配方文件的編輯
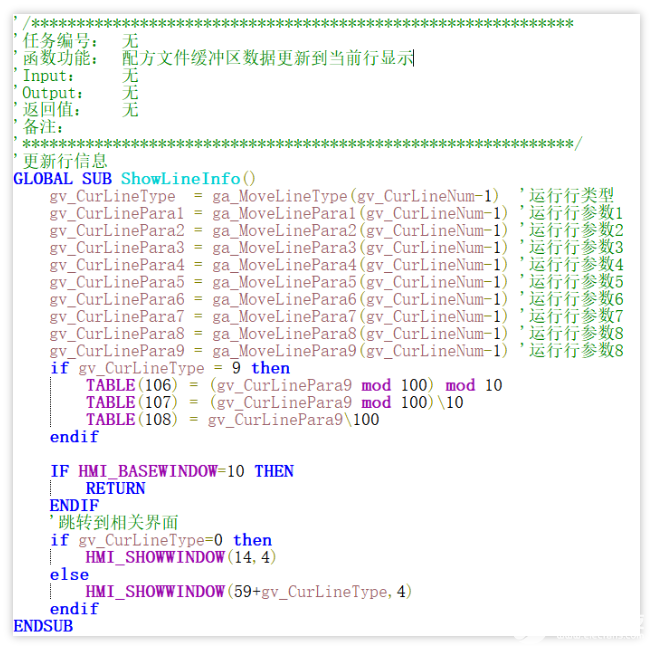
1.配方文件緩沖區數據更新到當前行顯示
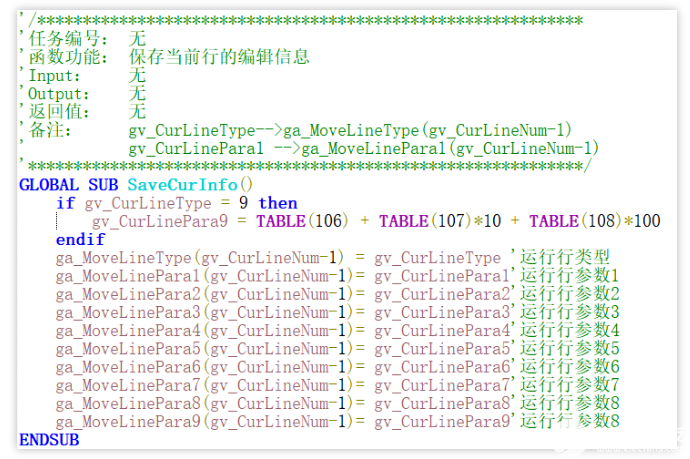
2.保存當前行的編輯信息
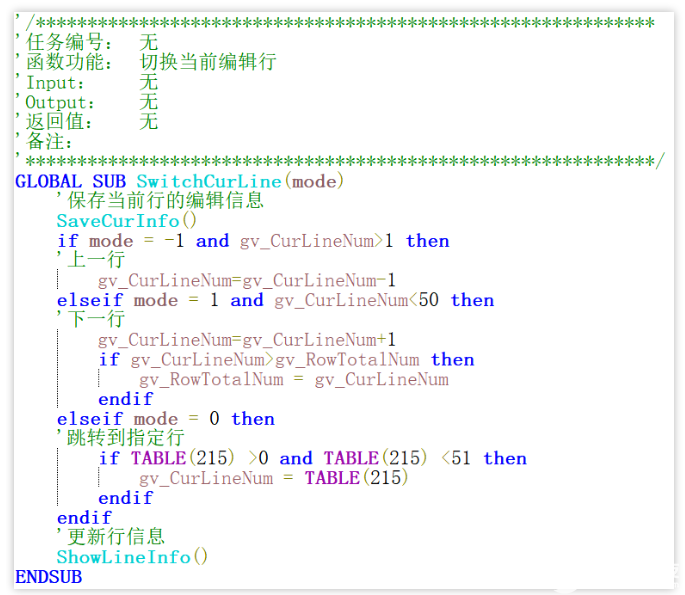
3.行切換
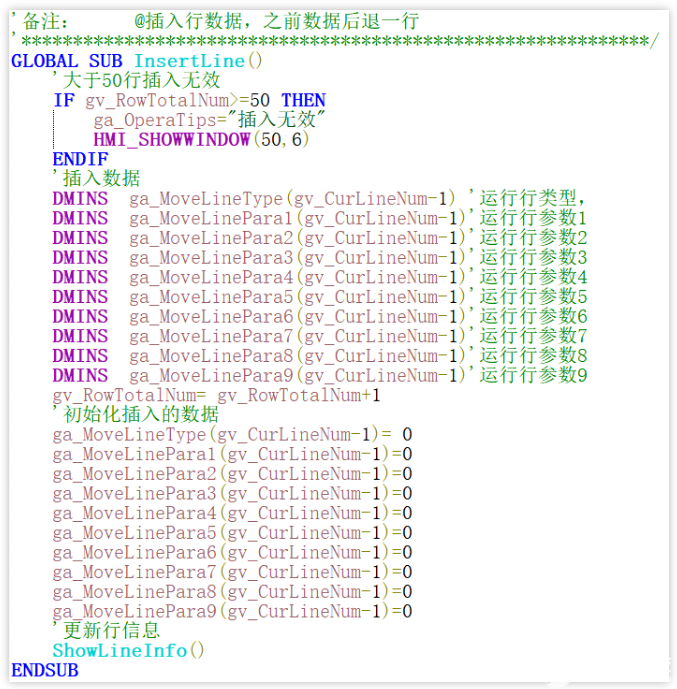
4.行插入
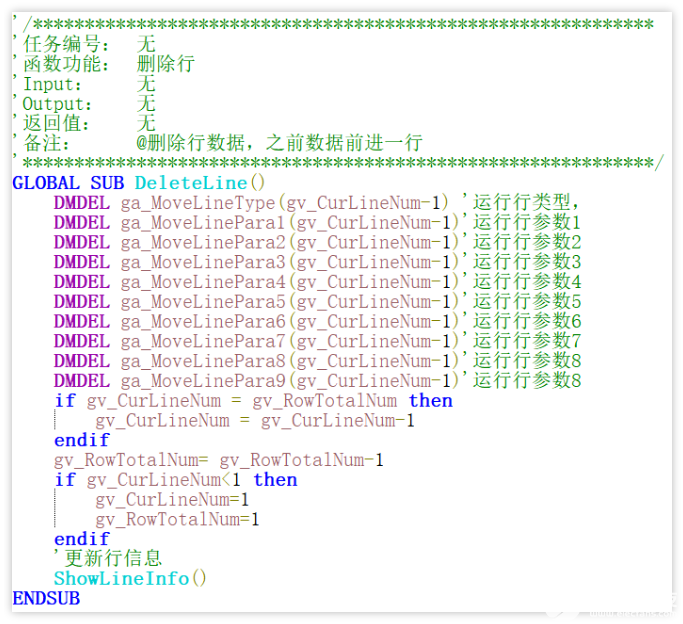
5.行刪除
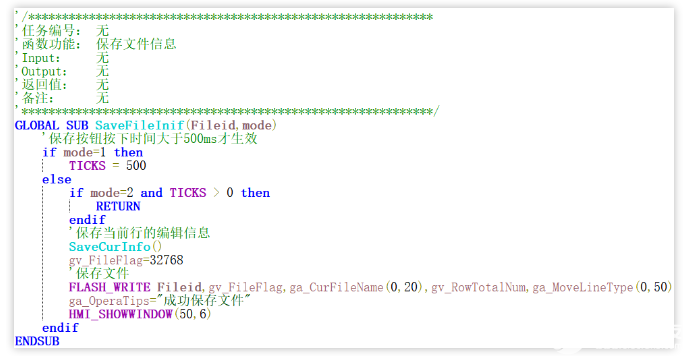
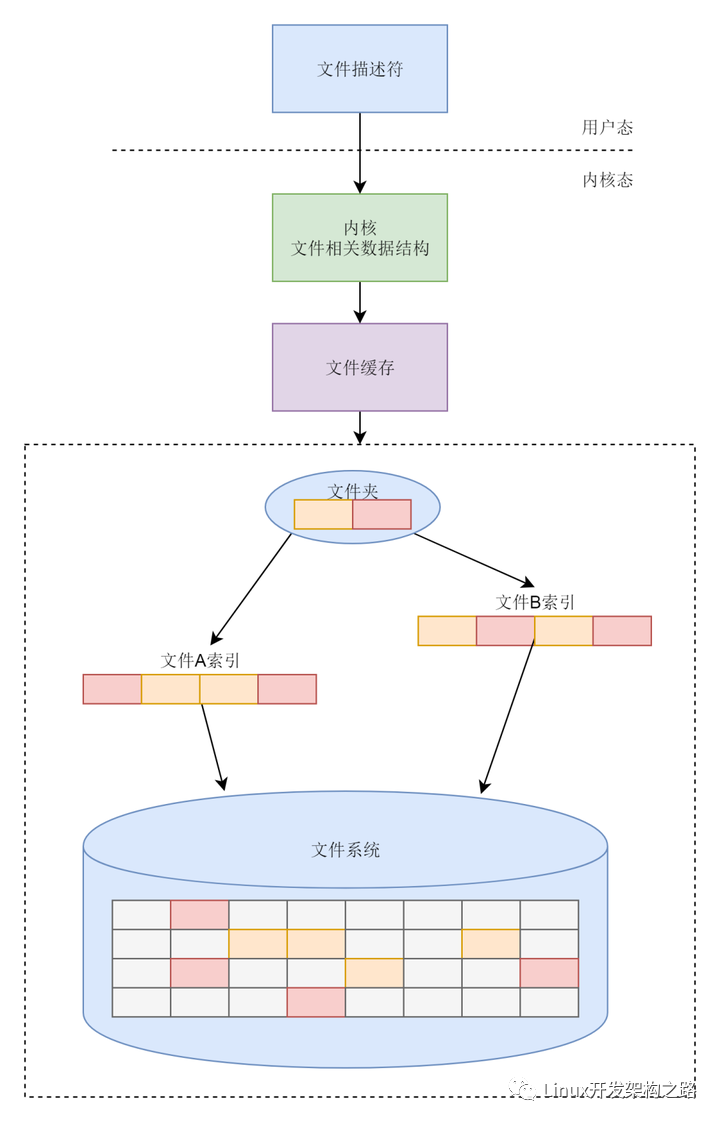
五、配方文件的保存
當點擊保存按鈕時調用函數SaveFileInif(Fileid,mode),將配方文件保存到對應的Flash塊里面。
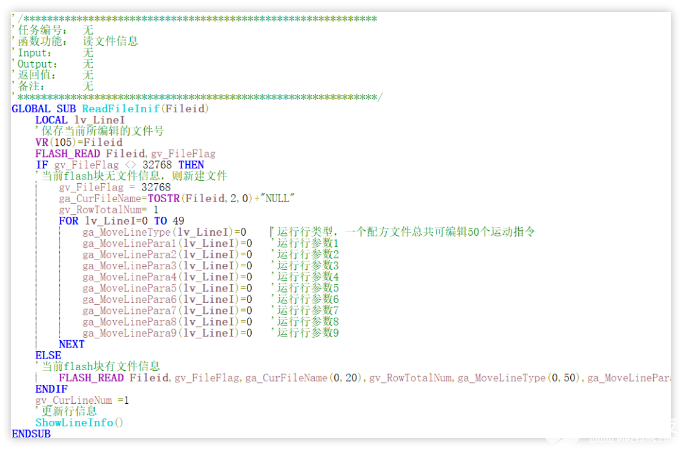
六、配方文件的讀取
在系統重啟后或者切換文件時需要我們重新讀取配方文件里面的數據,這時候我們可以通過調用函數ReadFileInif(Fileid)實現。
本次,正運動技術 運動控制+機器視覺Demo軟件框架(一):機械參數和配方文件的管理, 就分享到這里。
審核編輯:湯梓紅


















 工商網監
工商網監
評論