,強大的功能可應用在各種不同的設(shè)備上。 本章我們重點給用戶介紹基于LT8868SX系列應用于視頻拼機處理器的幾種實現(xiàn)方法。 ? -、HDMI 1080P@60Hz 1*2拼接方案 簡介:LT8642UXE是一顆支持HDMI2.0的4進2出的矩陣芯片,它既可以做HDMI矩陣切換
2024-03-19 18:11:16 486
486 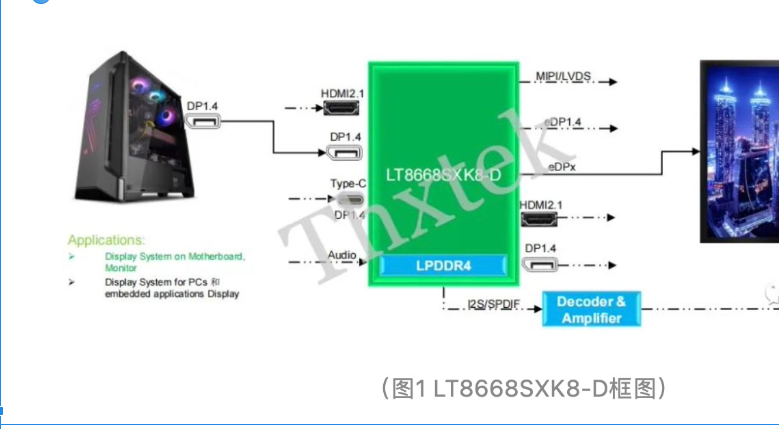
LoRa1280是一款遠距離的2.4GHz頻段的高性能物聯(lián)網(wǎng)的無線模塊,它是我司根據(jù)Semtech公司的高性能射頻芯片SX1280研發(fā)出相關(guān)系列的產(chǎn)品,LRa1280無線模塊使用LoRa調(diào)制,很好
2024-03-18 17:53:25359 
光的飛行時間來得到目標物距離。 ? 單一ToF 到混合ToF ? 提到ToF技術(shù),目前有iToF和dToF之分。iToF,indirect Time-of-Flight,是一種間接的光飛行時間傳感方法,通過測量相位偏移來間接測量光的飛行時間,而不是直接測量光的飛行時間。dToF正好相反,直接
2024-02-20 01:12:001847 電子發(fā)燒友網(wǎng)站提供《手持式激光測距儀產(chǎn)品介紹.zip》資料免費下載
2024-01-29 10:19:34 0
0 激光測距儀工作原理 晶振在激光測距儀的作用? 激光測距儀是一種利用激光技術(shù)測量物體距離的儀器。它通過測量激光脈沖在空氣中傳播的時間來計算出物體到測距儀的距離。下面將詳細介紹激光測距儀的工作原理以及
2024-01-25 16:04:56373 于許多領(lǐng)域,例如工業(yè)自動化、機器人導航、安防監(jiān)控等。本文將著重介紹超聲波測距的原理,并詳細說明超聲波測距傳感器的接線方法。 一、超聲波測距原理 聲波基礎(chǔ)知識 在介紹超聲波測距原理之前,我們需要了解一些聲波的基礎(chǔ)
2024-01-22 15:22:33352 激光測距模塊的工作原理 激光測距模塊怎么用 激光測距方法有哪幾種? 激光測距模塊,也稱為激光測距儀或激光測距裝置,是一種利用激光技術(shù)測量目標距離的設(shè)備。它通常由激光發(fā)射器、接收器、時鐘和微處理器
2024-01-03 15:59:13405 /details/134864572?spm=1001.2014.3001.5502 首先和大家介紹一下這幾款芯片的區(qū)別特點: SX127x類 :包含安信可Ra-01、Ra-01H、Ra-02,分別
2023-12-18 10:49:54338 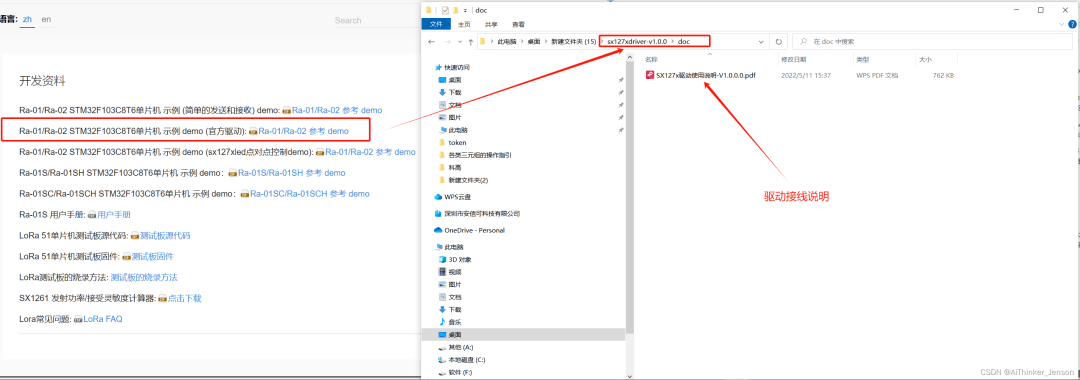
本篇主要介紹SX1278轉(zhuǎn)到LLCC68和SX1268/SX1262的軟件細節(jié)教程,文中涉及到的代碼,大家可去原文查看。
2023-12-16 16:19:291104 
Time-of-Flight(ToF)是一種用于測量物體距離的技術(shù)。它通過測量光或其他波的往返時間來確定物體與傳感器之間的距離。在光學ToF傳感器中,通常會發(fā)射一個光脈沖,然后測量這個光脈沖從傳感器
2023-11-25 08:29:26424 
電源專用升壓芯片IC”的芯片,它可以將電池電壓升高,從而延長移動電源的續(xù)航時間。SX1301是一種專為移動電源設(shè)計的升壓芯片,它采用了先進的開關(guān)式升壓技術(shù),可以在
2023-11-24 23:35:11
在近距離測距方案中,除去微波雷達、PIR、紅外對光管、超聲波之外,還有一種TOF(Time of Flight)方案,
2023-11-20 10:34:46625 
生產(chǎn)和測試,符合 RoHS、Reach 的標準。此系列模塊基于美國Semtech原廠的SX1280/SX1281射頻芯片而設(shè)計,它采用了LoRa的調(diào)制模式,很好地
2023-11-15 17:17:090 首先我們說下狀態(tài) TIME_WAIT 出現(xiàn)的原因 TCP的新建連接,斷開連接的流程和各個狀態(tài),如下圖所示 由上圖可知:TIME_WAIT 是主動斷開連接的一方會出現(xiàn)的,客戶端,服務(wù)器都有可能出現(xiàn)
2023-11-13 11:26:40350 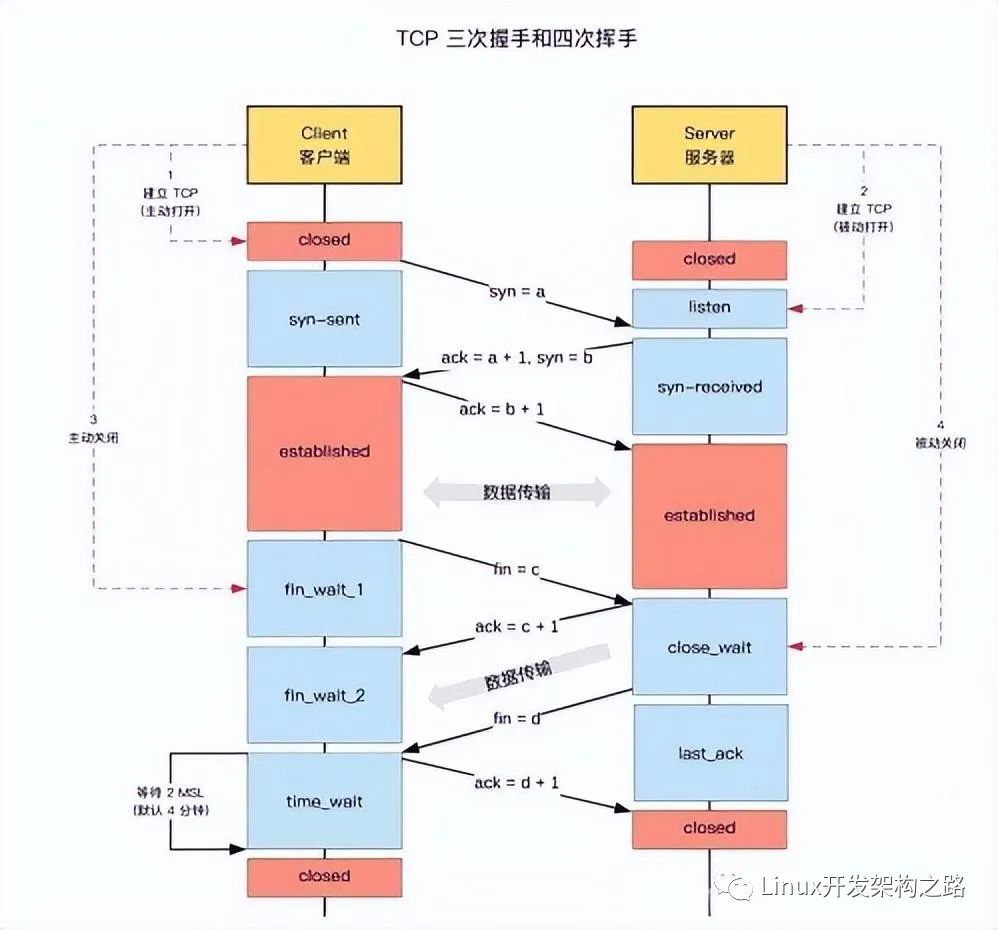
激光測距傳感器是一種廣泛應用于工業(yè)、測量和科學領(lǐng)域的高精度測量設(shè)備,它可以通過激光束測量目標距離。但是,如何選擇適合自己需要的激光測距傳感器呢?本文將從以下幾個方面為您介紹如何選擇激光測距傳感器
2023-10-10 17:11:10497 
更強大的功能 GNU time 命令提供了更強大的功能: 更詳細的統(tǒng)計信息 更豐富的格式輸出 支持保存統(tǒng)計數(shù)據(jù)到文件 下邊我們來學習寫 GNU time 的使用 1. 最簡單的用法 root
2023-10-09 17:53:46412 TOF是飛行時間(TIme of Flight)技術(shù)的縮寫,即傳感器發(fā)出經(jīng)調(diào)制的近紅外光,遇物體后反射,傳感器通過計算光線發(fā)射和反射時間差或相位差,來換算被拍攝景物的距離,以產(chǎn)生深度信息,此外再結(jié)合傳統(tǒng)的相機拍攝,就能將物體的三維輪廓以不同顏色代表不同距離的地形圖方式呈現(xiàn)出來。
2023-09-10 09:39:39542 
電子發(fā)燒友網(wǎng)站提供《Brocade SX6擴展刀片產(chǎn)品介紹.pdf》資料免費下載
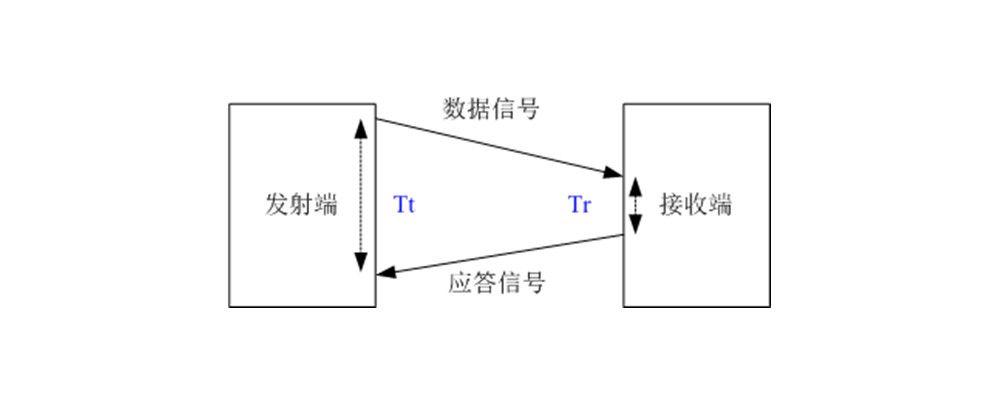
2023-08-30 10:29:340 時間差法測距原理是將紅外測距傳感器的紅外發(fā)射端發(fā)送信號與接收端接受信號的時間差t寫入單片機中,通過光傳播距離公式來計算出傳播距離L。
2023-08-04 09:53:373235 
フラッシュ開発ツールキット E8aエミュレータとの接続例(H8SXファミリ)
2023-08-03 18:30:300 SX1280它是Semtech公司推出的2.4GHz頻段的RF芯片。此芯片包含多樣的物理層以及多種調(diào)制方式,如LoRa,FLRC,GFSK。特殊的調(diào)制和處理方式使得LoRa和FLRC調(diào)制的傳輸距離
2023-07-26 15:28:39882 
設(shè)計包括Semtech SX1280低功耗、集成UHF收發(fā)器和天線開關(guān),用于在板載芯片天線和可選的外部天線之間進行選擇。硬件旨在實現(xiàn)最大范圍和最佳電池壽命。
2023-07-25 16:59:192 H8S H8SX Family E10A-USB Emulator Additional Document for 用戶手冊 (Supplementary Information on Using the H8SX/1725F,
2023-07-14 10:24:580 l決定了探測物體的分辨率。因此當物距越大,探測精度越低。因此該方法測距較短且需要大面積的光電探測器。 TOF為目前大多數(shù)的自動駕駛采用的雷達方案,通過發(fā)射脈沖激光,計算脈沖激光經(jīng)過目標并反射回探測器的時間,即飛行時間。飛行時間等
2023-07-08 09:40:222714 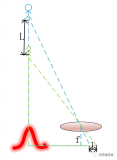
IP_數(shù)據(jù)表_H8SX
2023-07-04 20:38:530 H8SX/1653 組 硬件手冊
2023-06-28 19:26:230 H8SX/1520R 組 硬件手冊
2023-06-27 19:46:040 H8SX/1520群硬件手冊
2023-06-27 19:38:280 H8SX/1582 硬件手冊
2023-06-27 19:37:180 H8SX/1663群硬件手冊
2023-06-26 20:48:490 LoRa網(wǎng)關(guān)模塊應用的SX1301芯片數(shù)據(jù)吞吐量是SX1276/8芯片的多少倍?網(wǎng)關(guān)是連接2個不同網(wǎng)絡(luò)的設(shè)備。如果一個設(shè)備,它能將LoRa無線網(wǎng)絡(luò)和Internet連接起來,它就是一個LoRa網(wǎng)關(guān)。
2023-06-16 16:54:30669 
sx1276為Semtech公司推出的具有新型LoRa擴頻技術(shù)的RF芯片,具有低功耗、容量大、傳輸距離遠、抗干擾能力強等優(yōu)點。
2023-06-15 17:02:17406 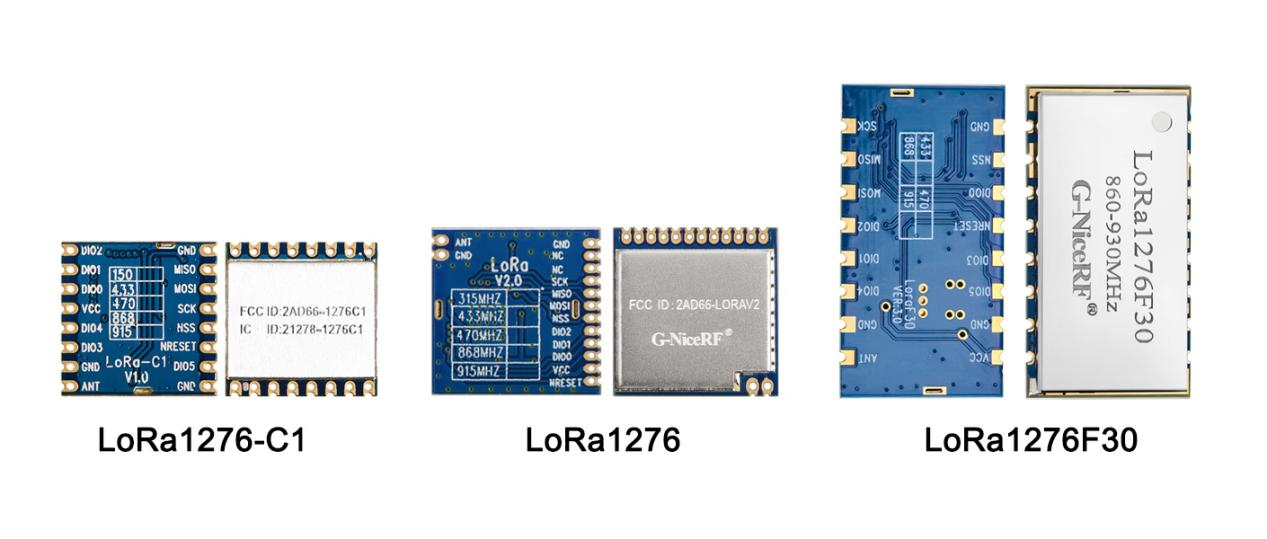
新型EA1280具有中國國家標準(GB標準)建議要求的檢測器分辨率,相比于Si - PIN二極管等其他半導體檢測器,其工作效率和分析準確度更高。尤其與其他分析方法相比,X射線熒光分析可提供快速、無損、簡單的元素分析,因此其持續(xù)多次用于RoHS合規(guī)性篩查中。
2023-06-12 14:23:48524 
通過推出我們的 UWB 收發(fā)器芯片,imec 克服了 UWB 廣泛采用的另一個障礙。該收發(fā)器基于具有成本效益的硅布局,在最先進的 IEEE 802.15.4z 無線電中以最低的功耗實現(xiàn)了最佳的測距精度。
2023-06-11 10:29:59705 Python在處理與時間相關(guān)的操作時有兩個重要模塊:time和datetime。在本文中,我們介紹這兩個模塊并為每個場景提供帶有代碼和輸出的說明性示例。
2023-06-05 16:51:21658 近些年迅猛發(fā)展的3D視覺技術(shù)已成為AGV領(lǐng)域的關(guān)鍵技術(shù)之一,進一步提升AGV智能化水平的同時,也實現(xiàn)了更高效、準確和安全的物流操作。在戶外環(huán)境中,用于AGV托盤或貨物識別最常見的兩種3D視覺技術(shù)分別是主動雙目視覺技術(shù)和ToF(Time-of-Flight)感知技術(shù)
2023-05-31 15:52:52888 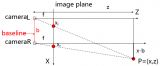
Semtech針對5G移動設(shè)備開發(fā)的PerSe Connect SX9376芯片組,極大地改善了個人連接設(shè)備的5G連接性能,并維持其合規(guī)性
2023-05-15 17:49:351083 在日常使用時,我們常用的測距傳感器有超聲波測距和紅外測距兩種方式。關(guān)于超聲波測距,在前面章節(jié)我們已經(jīng)有過介紹,本章教程主要進行紅外測距實驗,本章教程所用紅外測距傳感器型號為SHARP-2Y0A02
2023-05-12 17:00:50
在物流領(lǐng)域,即將到來的機器視覺用例之一是托盤尺寸標注。創(chuàng)新的3D飛行時間(time-of-flight)技術(shù)使得測量裝載托盤的尺寸成為可能,消除了手動測量所花費的時間,并最大程度地減少了由于尺寸重量不準確而導致的承運人的潛在費用。
2023-05-12 10:19:39194 
H8SX/1653 組 硬件手冊
2023-05-11 19:03:380 毫米波雷達技術(shù)方案
芯片介紹
ADT3102(77Ghz毫米波雷達芯片)
單芯片集成2路收2路發(fā)射頻通道,F(xiàn)MCW產(chǎn)生器,ADC,DSP,MCU(ARM、M3)等
集成了SPI、UART等多種接口
2023-05-09 10:32:44
H8SX/1520R 組 硬件手冊
2023-05-08 20:05:570 H8SX/1520群硬件手冊
2023-05-08 19:58:320 H8SX/1582 硬件手冊
2023-05-08 19:57:240 H8SX/1663群硬件手冊
2023-05-06 19:02:420 LLCC68和SX1278都是美國Semtech公司推出的LoRa芯片。思為無線用Semtech公司的芯片研發(fā)的LoRa模塊,它們的各自的優(yōu)勢是什么?
2023-05-05 16:49:16949 
SX1280芯片的LORA模塊在關(guān)于WIFI干擾的情況下相交于傳統(tǒng)調(diào)制方式具有極大的優(yōu)勢。 與用于共存的傳統(tǒng)調(diào)制技術(shù)相比,LoRa物理層的使用為我們提供了一些潛在的額外性能好處,并對帶內(nèi)和通道內(nèi)干擾
2023-04-29 16:10:211570 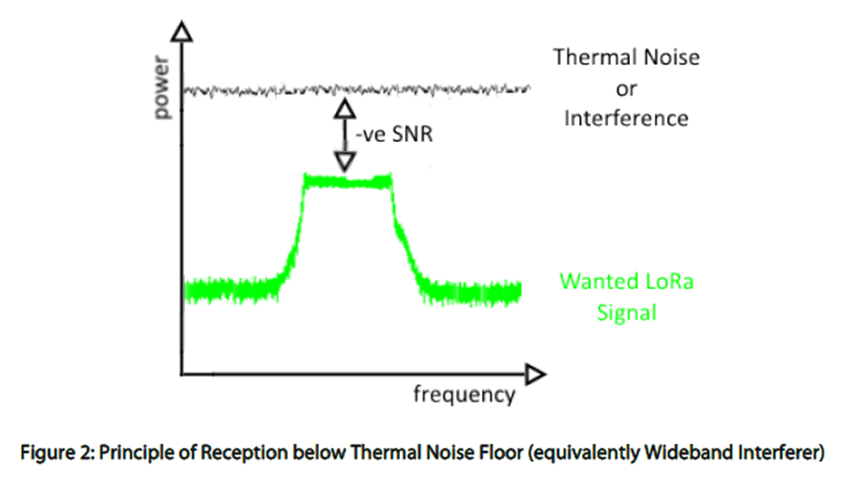
H8SX/1657群硬件手冊
2023-04-28 20:17:530 H8SX/1650群硬件手冊
2023-04-28 20:17:380 H8SX/1651群硬件手冊
2023-04-28 20:17:220 H8S H8SX 系列 E10A-USB 仿真器用戶手冊附加文檔(關(guān)于使用 H8SX/1544F 和 H8SX/1543F 的補充信息
2023-04-28 18:49:540 H8S H8SX 系列 E10A-USB 仿真器用戶手冊附加文檔(關(guān)于使用 H8SX/1527F H8SX/1525F H8SX/1582F 和 H8SX/1527RF 的補充信息
2023-04-28 18:49:350 Renesas Starter Kit for H8SX/1648 教程手冊
2023-04-28 18:47:530 H8S H8SX Family E10A-USB Emulator Additional Document for 用戶手冊 (Supplementary Information on Using
2023-04-28 18:32:260 產(chǎn)品概述DL-SX1278PA 是基于 Semtech 公司的射頻芯片 SX1278 為核心自主研發(fā)的 LoRa 模塊,為了滿足更遠的傳輸距離和覆蓋率 模塊內(nèi)部集成了功率放大器(PA)與低噪聲放大器
2023-04-28 09:50:122 H8SX/1648 H8SX/1648A H8SX/1648L H8SX/1648G H8SX/1648H群硬件手冊
2023-04-26 20:20:471 H8SX/1638群H8SX/1638L群硬件手冊
2023-04-26 20:07:120 H8SX 系列軟件手冊
2023-04-26 20:06:192 H8SX/1668R群 H8SX/1668M群硬件手冊
2023-04-26 20:03:130 H8SX/1658R群 H8SX/1658M群硬件手冊
2023-04-26 20:02:000 激光測距傳感器 VDM28-8-L1/73c/136 測距傳感器的工作原理主要方式: 三角反射原理型: 非接觸測距的第一種方法,主要通過接收器上感應接受光源的位置不同,來測量距離。此種方法常用
2023-04-26 11:17:10820 H8S H8SX 系列 E10A-USB 仿真器用戶手冊附加文檔(關(guān)于使用 H8SX/1665F 和 H8SX/1662F 的補充信息)
2023-04-20 19:48:190 H8S H8SX 系列 E10A-USB 仿真器用戶手冊附加文檔(關(guān)于使用 H8SX/1655F 和 H8SX/1652F 的補充信息)
2023-04-20 19:48:090 H8S H8SX 系列 E10A-USB 仿真器用戶手冊附加文檔(關(guān)于使用 H8SX/1645F H8SX/1643F 和 H8SX/1641F 的補充信息)
2023-04-20 19:47:4913 H8S H8SX 系列 E10A-USB 仿真器用戶手冊附加文檔(關(guān)于使用 H8SX/1635F H8SX/1631F H8SX/1633F 的補充信息)
2023-04-20 19:47:310 H8S H8SX Family E10A-USB Emulator Additional Document for 用戶手冊 (Supplementary Information on Using
2023-04-20 19:45:370 H8S H8SX Family E10A-USB Emulator Additional Document for 用戶手冊 (Supplementary Information on Using
2023-04-20 19:44:531 H8S H8SX 系列 E10A-USB 仿真器 用戶手冊的附加文檔 使用 H8SX/1653F 的補充信息 H8SX/1654F H8SX/1663F 和 H8SX/1664F
2023-04-20 19:44:230 H8SX/1622群硬件手冊
2023-04-20 19:20:370 H8SX/1544群硬件手冊
2023-04-20 19:14:491 H8SX/1645組 H8SX/1645L組硬件手冊
2023-04-20 19:01:560 H8SX/1635群H8SX/1635L群硬件手冊
2023-04-20 19:01:080 H8SX/1655群 H8SX/1655M群硬件手冊
2023-04-20 19:00:450 H8SX/1665群H8SX/1665M群硬件手冊
2023-04-20 19:00:080 H8SX/1665MZ 組 硬件手冊
2023-04-19 19:55:080 H8SX/1668MZ 組 硬件手冊
2023-04-19 19:54:520 フラッシュ開発ツールキット E8aエミュレータとの接続例(H8SXファミリ)
2023-04-12 19:11:570 TIME-OF-FLIGHT (TOF) CONTROLLER
2023-04-06 15:25:43
1280EMP6X72YDBULK
2023-04-04 09:34:54
1280EMP3X144YDBULK
2023-04-04 09:34:52
1280EMP2X144YDBULK
2023-04-04 09:34:33
1280EMP3X72YDBULK
2023-04-04 09:34:20
1280EMP2X72YDBULK
2023-04-04 09:34:05
1280 EMP 1 X 144 YD BULK
2023-04-04 09:33:55
1280EMP1/2X144YDBULK
2023-04-04 09:33:13
H8S H8SX Family E10A-USB Emulator Additional Document for 用戶手冊 (Supplementary Information on Using the H8SX/1725F,
2023-04-03 19:25:590 單光子雪崩二極管SPAD(Single Photon Avalanche Diode)是支持dToF(direct Time-of-Flight,直接飛行時間深度測量)技術(shù)的最前沿感知器件。
2023-04-03 11:16:082339 STM32L053R8, VL6180X, mbed-Enabled Development FlightSense? Light, 3D Time-of-Flight (ToF) Sensor Evaluation Board
2023-03-30 11:58:24
VL53L0X - Light, 3D Time-of-Flight (ToF) Sensor Evaluation Board
2023-03-30 11:57:59
OPT8241, OPT9221 - Light, 3D Time-of-Flight (ToF) Sensor Evaluation Board
2023-03-30 11:57:59
STM32F401RE, VL53L0X, mbed-Enabled Development Light, 3D Time-of-Flight (ToF) Sensor Evaluation Board
2023-03-30 11:57:59
EVAL KIT FOR MAX1280
2023-03-30 11:47:06
EVAL BOARD FOR XR20M1280L32
2023-03-29 22:57:54
EVAL BOARD FOR XR20M1280L32
2023-03-29 22:57:53
SX12802.4GHZDEVELOPMENTKIT
2023-03-29 19:44:20
單光子雪崩二極管SPAD(Single Photon Avalanche Diode)是支持dToF(direct Time-of-Flight,直接飛行時間深度測量)技術(shù)的最前沿感知器件。
2023-03-29 10:07:15964 SRR1280A-331K
2023-03-28 18:06:09
CMI-9605-1280T
2023-03-28 13:21:38
據(jù)麥姆斯咨詢報道,近期,北京理工大學光電成像技術(shù)與系統(tǒng)教育部重點實驗室科研團隊在《紅外與激光工程》期刊上發(fā)表了以“Time-of-Flight透散射介質(zhì)成像技術(shù)綜述”為主題的文章。該文章第一作者為王霞副教授,主要從事光電成像技術(shù)和光電檢測技術(shù)方面的研究。
2023-03-27 10:42:54979 遠程,低功耗,2.4 GHz無線電收發(fā)器,具有測距能力
2023-03-24 16:42:59
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論