機器人元器件 機器人套件
2024-03-14 22:03:38
機器人元器件 機器人套件
2024-03-14 21:13:23
機器人元器件 機器人套件
2024-03-14 20:37:55
機器人元器件 機器人套件
2024-03-14 20:37:45
探討碼垛機器人紙箱碼垛的優勢。 一、效率高的碼垛作業 碼垛機器人具有較優的碼垛速度,可以在短時間內完成大量紙箱的碼垛工作。相較于傳統的人工碼垛,碼垛機器人不受疲乏、情緒等人為因素的影響,可以持續穩定地進行作
2024-03-11 14:33:08 51
51 編解碼一體機相對于傳統的編解碼設備具有多個優勢。以下是編解碼一體機的幾個主要優勢: 高效實時的視頻處理能力:編解碼一體機采用先進的編解碼算法和云計算技術,能夠實現高效、實時的視頻處理,滿足各種應用場
2024-01-31 14:56:04284 
光隔離探頭相對差分探頭的優勢? 光隔離探頭與差分探頭是兩種常用的檢測技術,它們在不同的應用中有著各自的優勢。在下面的文章中,將詳細介紹光隔離探頭相對于差分探頭的優勢,并闡述其在實際應用中的重要性
2024-01-08 11:42:19191 產品特點1、適合于大幅面空間焊接,機器人智能化操作,靈活可靠,可以六軸聯動,可任意空間焊接,不局限于平面焊接;2、可以根據生產需求而定制夾具;3、實現雙工位或多工位焊接操作,節省產品安裝夾具時間
2024-01-04 13:57:58
相對于一般的工業機器人及家用服務機器人,特種機器人的工作環境和作業條件更為復雜,對機器人結構和功能也提出了更高的要求。因此,未來特種機器人領域將呈現出更多的創新和發展。
2024-01-04 11:42:06282 
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
MAX_STEERING_PRO值會讓機器人旋轉得更快,但轉彎時更難精確控制。
高MAX_TARGET_ANGLE_PRO值將使機器人減小其相對于地板的角度,但這會使恢復和轉彎變得更加困難。
UDP 網絡通信控制
這個功能的實現
2023-12-20 10:22:18
近日, 搭載KaihongOS的“夸父”人形機器人通過OpenAtom OpenHarmony(以下簡稱“OpenHarmony”)3.2 Release版本兼容性測評并獲頒兼容性證書 。這體現了
2023-12-20 09:31:19
手持式開關回路電阻測試儀相對于傳統回路電阻測試有什么閃光點? 手持式開關回路電阻測試儀(下文簡稱“手持儀”)相對于傳統回路電阻測試在許多方面具有閃光點。 一、便攜性 手持儀相對于傳統回路電阻測試儀
2023-12-19 15:36:29118 更高的擊穿場允許器件在給定區域承受更高的電壓。這使得器件設計人員能夠在相同的芯片尺寸下增加用于電流流動的面積,從而降低給定面積的器件電阻 (R sp )。該器件的電阻與傳導功率損耗直接相關,因此較小的 R sp將導致更低的損耗,從而產生更高的效率。 電子漂移速度是電子由于電場而在材料中移動的速度。SiC 半導體的電子漂移速度比 Si 基半導體高 2 倍。電子移動得越快,設備開關的速度就越快。系統設計人員可以從這種更快的開關中獲得兩個好處:從開到關的過渡時間內功耗更低,以及使用更小的磁性元件和電容器。
2023-12-19 09:41:36345 
/UNIPOLAR CONFIGURATION(極性配置)的時候說到:兩極輸入區域沒有暗指該部分可容忍負電壓,并尊重to system AGND.這句話應該是說 雙極性模式下不能輸入相對于系統AGND的負壓;
這顯然是矛盾的,各位大神這問題怎么解?
2023-12-18 06:51:30
大大提高了工作效率,也極大地提升了實驗精度。自動移液機器人是一種能夠代替人工進行精確液體操作的自動化設備。它通過精密的機械結構和先進的控制系統,實現了對微小液體體積的準
2023-12-06 11:21:24
。
(3) 支持實時控制與通信,數據安全可靠如今ROS系統支持實時控制與通信,并且數據安全可靠。“實時性”、“安全性”是如今工業自動化行業的普遍追求,特別是對于AGV開發,若AGV機器人的主控制器、雷達
2023-11-30 16:01:01
為什么一般相對于集成運放而言,電壓比較器的轉換速率SR較高? 電壓比較器是一種電子元件,用于比較兩個輸入電壓的大小,并將比較結果轉換為輸出信號。相對于集成運放而言,電壓比較器的轉換速率較高的原因可以
2023-11-22 16:17:59252 ad8422放大問題,例如:輸入是0mv輸出相對于ref管腳是1.8v
2023-11-16 06:42:57
堆疊電池相對于卷繞電池的優缺點 堆疊電池是指將多個電池電芯疊放在一起,通過串聯或并聯的方式組成一個電池組,而卷繞電池則是采用將正負極材料通過疊層、卷繞等方式制備成電芯的一種特殊結構。堆疊電池和卷繞
2023-11-10 14:49:37262 pic單片機做掃地機器人有什么優勢
2023-11-09 07:24:46
在逆變器、電機驅動器和電池充電器等應用中,碳化硅(SiC)器件具有更高的功率密度、更低的冷卻要求和更低的整體系統成本等優勢。
2023-11-07 09:45:59428 
,當離心機發出用芯需求指令后,將根據指令信息,自動選取相應規格的砂芯,發送至該離心機運芯小車上。 為避免單機作業,鑄造車間設置了2臺桁架機器人。如按照常規方案,2套桁架機器人需設置滑車機構,大小車升降及手爪電機電源
2023-11-07 09:44:08149 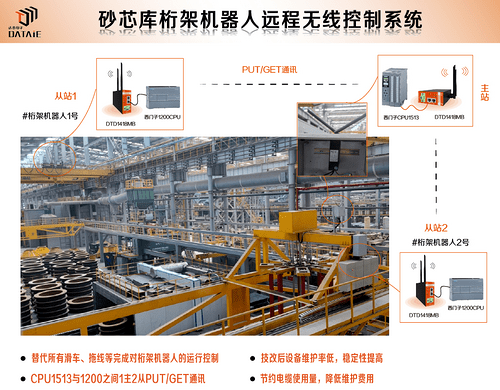
機器人編程需要什么軟件
2023-11-01 07:34:30
MSP430F5529相對于其他單片機有什么獨特優勢
2023-11-01 06:20:13
我看NI有Robotics Toolkit for KUKA KR C2的附加包,這個怎么用啊?如何和kuka機器人建立通訊啊?是Tcp接口嗎?
2023-10-21 20:59:28
碳化硅(SiC)技術已達到臨界點,即不可否認的優勢推動技術快速采用的狀態。 如今,出于多種原因,希望保持競爭力并降低長期系統成本的設計人員正在轉向基于SiC的技術,其中包括: 降低總擁有
2023-10-13 09:24:17824 更柔性化的自動化產線才能滿足如今車企的生產需求,相對于柔性化程度不足的工業機器人而言,協作機器人同時擁有交互安全、即插即用、快速部署等優勢,能夠應對各種復雜工藝,極大降低改造成本,提升產線靈活性,充分滿足當前汽車行業柔性智造需求。
2023-10-11 09:15:37182 教你用Arduino讓機器人學會識別標識并作出行為。你的人工智能小車從此有了眼睛!材料單:跟蹤機器人底盤視覺傳感器Arduino Uno電動機驅動板18650 Li-離子電池
2023-09-27 07:36:55
本文檔的主要內容詳細介紹的是Arduino教學機器人的使用教程
2023-09-27 06:53:26
在本項目中,我們將學習如何使用帶PID控制器的線跟隨機器人使用Arduino Nano來解決迷宮。
2023-09-25 06:54:13
自動化運輸設備,取代產線部分人工并提升生產效率。
項目方案
通過深入了解客戶痛點,我們決定率先引入穩石機器人智慧物流解決方案,實現自動上下料和運輸作業,從而提升物流效率和降低生產成本。
針對客戶的車間
2023-09-21 13:45:14
的運營成本、人力成本還在不斷提高(如:辦公場地的租金、員工的工資、社保公積金、節假日福利等)。
如今的智能電話機器人,每天的電話撥打量可達800-1000通,相比人工提高了3-5倍,大大縮短了名單的篩選
2023-09-21 11:09:59
邁步手部康復外骨骼機器人,機器人可以帶動手指完成兩種康復運動——雙向彎曲運動和內收外展運動。機器人可適應不同患者的手指尺寸,外骨骼手的長度可調節,長時間佩戴不會使患者產生疲勞感。手部康復外骨骼機器人
2023-09-20 17:38:02
下肢外骨骼康復機器人BEAR-A1利用仿生學、人體工學、機器人技術,為下肢運動功能障礙者提供康復訓練。通過對患者髖、膝關節提供助力完成康復訓練,可以有效降低治療師工作強度,提高康復訓練效率,提高患者
2023-09-20 17:31:33
邁步機器人BEAR-H系列是用于輔助腦卒中患者步態康復訓練的新型可穿戴式下肢外骨骼機器人。機器人擁有主動被動訓練模式,通過對患者髖、膝、踝關節提供助力完成行走訓練,可以節省人力,并提高康復效果
2023-09-20 17:25:48
利用 Matlab 建立移動機器人的動力學模型 ,在虛擬現實 (VR )環境下 ,實時仿真移動機器人路徑跟蹤的運動特性 ,為基于 Internet 的機器人遙操作試驗搭建了仿真平臺 。 實驗結果表明
2023-09-20 06:24:09
一、SDNAND和NORFlashSDNAND和NORFlash在不同的方面都有著不同的優劣勢,SDNANDNORFlash成本SDNAND相對較便宜NORFlash相對較昂貴容量1Gb
2023-08-28 14:12:04642 
產品介紹小安值班機器人是集電力監控系統、動環輔控系統、巡檢機器人“三合一"功能產品,在自學習算法和大數據的加持下,具備強大的AI能力,可實現配電室的數字化及無人值守。 特色功能全感知電力
2023-08-22 14:57:47
本帖最后由 機智小編 于 2023-8-16 17:37 編輯
一、前言
本草莓采摘機器人控制系統是由江西理工大學機械工程專業的程鵬勝設計開發完成。針對某草莓種植基地模塊化種植的高架草莓人工
2023-08-16 17:35:54
本案例是西門子1200PLC通過PROFINET轉EtherNet網關連接發那科搬運機器人配置案例。所需設備:西門子1200PLC、Profinet轉EtherNet IP網關、Fanuc機器人
2023-08-03 17:58:40
。而生產生活中常用的便是生物質蒸汽發生器,其使用優勢相對于傳統鍋爐有以下幾點: 1.從體積上來看,生物質蒸汽發生器的體積相對鍋爐較小,占地面積小。生物質蒸汽發生器通常采用緊湊的新式設計,在設計的時候,考慮是否適應
2023-07-14 10:23:16244 
MRC3100系列AMR移動機器人控制器,適用潛伏頂升式、協作(復合)式、輥筒式等差速底盤類型移動機器人,內置激光導航及二維碼導航算法,支持差速底盤運動模型。MRC3100系列自帶豐富的I/O資源
2023-07-11 10:12:02
通過視覺傳感器(或組合式的色標傳感器),檢測事先鋪設在地面的色帶與移動機器人(AGV/AMR)的相對位置,從而使小車沿既定路線(色帶)行駛。
**色帶導航優點:**鋪設容易改路徑,成本低
2023-06-28 09:52:41
量,保證移動機器人按照規劃路徑順利地到達目標位置。而開環控制則是根據預先設定的控制量進行運動控制,不考慮機器人當前狀態的影響。開環控制相對簡單,但精度較低,常用于一些簡單的任務。
然而由于自主
2023-06-28 09:36:32
舉個例子來說,里面有彈簧的,很不好裝,必須有幾個舌頭壓著。如果你沒裝過,那肯定機器人也裝不出來。所以,有基層打工經驗也是一種很好的知識,盡管老板不要求,但閱歷決定了成功的難度。
比如我,程序寫得可能
2023-06-09 12:55:19
不要被復雜的生產線嚇倒,生產線可以看成多個單獨的設備或機器人,每部分完成一個功能。
2023-06-08 17:40:58
自編程是如何完成的。
自編程其實也不是很高深的問題。
當用戶給出參數時,有時也包括邏輯。
例如用戶說,如果設備打開完畢,執行一個命令。
這個例子就包括了一個如果。你的智能機器人只需要生成一個
2023-06-08 16:20:45
機器人也是一種設備,它主要內容是完成一個制造的其中一個功能。
制造一個產品,可以分為幾個部件。和裝配幾個部件。
一個部件,可以是一個模具。或者由機器人完成組成一個模具。
機器人主要完成的是一些模具
2023-06-06 16:18:33
隨著人工智能和機器人技術的不斷發展 ,協作機器人已成為工業生產和制造業中的一種重要機器人類型。相對于傳統機器人,協作機器人更為安全、靈活和易于操作,能夠與人類在同一工作環境下協同工作,提高生產效率
2023-06-05 15:34:23603 
我正在開發一些 WSN 機器人,
我現在正在使用 2 個 ESP8266,一個充當 WSN 傳感器節點,另一個充當機器人節點,
機器人在從其他 WSN 傳感器節點獲取數據時正在工作(現在亮起LED
2023-05-22 09:55:59
模型要具備齒輪,導軌幾種基本的運動原理。
要分辨基本圖形,視覺模型要能分辨圓形,方形和三角形。
有了這兩點,機器人就基本上能計算開模和注塑這種簡單的工作了。要替代人類的工作,還要進一步學習。
2023-05-19 20:40:25
隨著工業技術的發展和進步,焊接自動化在制造業中得到越來越廣泛的應用。相比于傳統的人工焊接,焊接自動化具有許多優點和一些局限性。本文將重點探討焊接自動化相對于人工焊接的優缺點。 首先,讓我們先看
2023-05-18 17:14:03826 兒童陪護機器人越來越受到人們的關注,其中轉動控制是其重要組成部分之一。步進電機芯片作為一種常用的控制芯片,被廣泛應用于兒童陪護機器人中的轉動控制。本文將從步進電機芯片的工作原理、優勢和應用場景等方面
2023-05-11 15:12:45
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-20 10:07:10
我想知道 Flex IO I2S 相對于 SAI 的優缺點。而且,當使用 SAI 可以實現相同的功能時,為什么有人使用 FlexIO i2S?
2023-04-20 09:22:07
產品方向,自由定位。開放友好,操作便捷? 模塊化設計、緊湊型的新一代關節模組,其重量、尺寸、安裝方式、外觀等相對RJS系列作了大幅優化? 為客戶后期生產的關節機器人
2023-04-19 15:23:14
泰科關節機器人具備哪些優勢? 一、編程簡單可以讓無編程經驗的操作人員能快速設置和操作我們的直觀、3D 可視化協作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 15:03:00
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:43:30
深圳泰科智能TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作
2023-04-19 11:39:15
深圳泰科智能TA6系列協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 10:58:47
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:53:03
RJU系列關節模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶可根據自身產品方向,自由定位
2023-04-19 10:48:11
,讓機器人開發更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩定性更好減少機器人開發過程
2023-04-19 10:40:37
TB6-R3協作機器人是一款靈活的小型工業協作機器人,其精巧的機械結構設計,外形緊湊,能夠適應狹小的工作空間,及高精密的工作任務需求;這款協作機器人自重僅為11.5KG,有效負載為3KG,工作半徑達666mm,是輕型裝配和高精度控制的理想選擇。
2023-04-19 10:18:50
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-19 10:05:39
TB6-R15協作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領域的自動化作業任務。這款協作機器人功能強大、高自重負載比、高可靠性、模塊化關節設計,易于末端擴展外部設備,可以實現快速安裝部署。
2023-04-19 09:27:59
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、科研、教育等多個行業、多場景的自動化需求。-
2023-04-19 09:22:29
TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產應用需求。模塊化
2023-04-19 09:16:32
機器人關節電機是專業為機器人關節設計研發生產。電機既有中空大孔徑,能保證關節模組完美融合的組合, 電機的定轉子機構緊湊,轉子采用了高性能稀土永磁材料,此系列電機轉矩脈動極低,易于速度控制和精確
2023-04-18 17:35:19
產品優勢專注機器人關節研發,RJS系列關節模組具有定位精度高、性能可靠等特點。 模塊化設計RJS關節模組集成無框電機、驅動器、諧波減速器、編碼器、制動器于一體,結構小巧緊湊,6軸RJS關節
2023-04-18 14:04:34
,讓機器人開發更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩定性更好減少機器人開發過程
2023-04-17 18:01:33
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:57:19
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 17:40:55
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C、醫療、電力、科研、教育等多個行業、多場景的自動化需求。
2023-04-17 16:36:37
RJU系列關節模組——面向商業、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統外形的機器人關節,而是一款能夠給機器人更多設計空間,和應用領域的關節,客戶
2023-04-17 16:25:29
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 16:12:03
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:57:13
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10協作機器人是一款功能更強的工業級協作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:40:56
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:31:15
深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:25:07
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:15:06
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:07:26
RJS-II系列關節模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協作機器人關節,一體化集成的RJS-II不僅結構尺寸更小,性價比更高,為您解決機器人在更多復雜環境中的適應性和穩定性
2023-04-17 15:02:00
的不是水位的高度,而是污水的量。當機器人開始工作時,污水將進入污水箱,每當進入指定容量的污水,傳感器會測量并發送信號到微控制器,通知其污水箱已滿并需要清潔。總體而言,液位檢測對于掃地機器人的正常運行
2023-04-15 11:21:46
今天小編就為大家介紹一種用于替代人工對設備進行檢查和維護的特種機器人——智能巡檢機器人。機器人大致可分為工業機器人、服務機器人和特種機器人,雖然相較于前兩類機器人而言特種機器人的市場規模最小,但隨著
2023-04-12 15:49:23
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論