國(guó)內(nèi)虛擬研究平臺(tái)多基于單電機(jī)設(shè)計(jì),而實(shí)際工業(yè)中多電機(jī)配合工作更為常見(jiàn),如機(jī)器人、3D打印機(jī)等。多電機(jī)同步控制在工業(yè)自動(dòng)化生產(chǎn)系統(tǒng)中廣泛存在,但目前基于FPGA納秒級(jí)實(shí)時(shí)仿真平臺(tái)多為單電機(jī)設(shè)計(jì),進(jìn)行多
2024-03-19 16:13:55
3月3日,聯(lián)合電子官微發(fā)布,推出面向跨域融合的新一代整車運(yùn)動(dòng)域控制器VCU8.6平臺(tái)。
2024-03-04 09:52:04 413
413 
一、項(xiàng)目簡(jiǎn)介1、項(xiàng)目整體介紹VCU(Vehiclecontrolunit)整車控制器,作為新能源汽車中央控制單元是整個(gè)汽車控制系統(tǒng)的核心。下面框圖展現(xiàn)了VCU在汽車中的作用。2、VCU整體結(jié)構(gòu)
2024-02-24 08:09:36475 
電機(jī)控制器工作原理:電機(jī)控制器就2個(gè)功能:逆變+控制,逆變是指將直流電逆變?yōu)轭l率、大小可調(diào)的交流電,然后根據(jù)VCU信號(hào)、各路傳感器信號(hào)控制電機(jī)轉(zhuǎn)速。
2024-02-23 14:53:56187 
控制器軟件開(kāi)發(fā)的V流程中,有兩個(gè)需要通過(guò)實(shí)時(shí)仿真完成的重要環(huán)節(jié),即快速控制原型(RCP)與硬件在環(huán)仿真(HIL)。
2024-02-23 10:32:13321 
的可行性。整個(gè)系統(tǒng)采用多個(gè)步長(zhǎng)設(shè)置。整個(gè)電力電子電路系統(tǒng)的仿真步長(zhǎng)為1e-6;而控制系統(tǒng)的控制周期設(shè)定為1e-4,也就是10Khz,載波頻率設(shè)置在2000Hz。可以看到離線仿真結(jié)果能較好的跟隨電壓設(shè)定值
2024-02-21 17:31:32
隨著新能源汽車產(chǎn)業(yè)的迅猛發(fā)展,硬件在環(huán)(HiL)仿真測(cè)試技術(shù)正迎來(lái)前所未有的市場(chǎng)機(jī)遇。上海蔚赫信息科技有限公司(以下簡(jiǎn)稱“蔚赫信息”)最新交付的Vehinfo LABCAR解決方案,是其收購(gòu)博世
2024-01-23 11:13:17353 控制器軟件開(kāi)發(fā)的V流程中,有兩個(gè)需要通過(guò)實(shí)時(shí)仿真完成的重要環(huán)節(jié),即快速控制原型(RCP)與硬件在環(huán)仿真(HIL)。
2024-01-19 13:41:25283 
實(shí)時(shí)仿真?硬件在環(huán)?RCP?HIL...這些詞是否還有些傻傻分不清呢?本期將帶大家從零走近實(shí)時(shí)仿真,快來(lái)Get吧。
2024-01-16 10:34:48326 RFID(射頻識(shí)別)倉(cāng)庫(kù)管理系統(tǒng)是利用RFID技術(shù)實(shí)現(xiàn)對(duì)倉(cāng)庫(kù)貨物進(jìn)行追蹤、管理和安全控制的一種智能化系統(tǒng)。它由硬件部分和軟件部分組成,下面將進(jìn)行分析。 一、硬件組成 RFID讀寫器:RFID讀寫器
2024-01-15 11:36:35311 使用 MATLAB 和 Simulink 設(shè)計(jì)和構(gòu)建 Rivian 車輛仿真界面平臺(tái)幫助我們實(shí)現(xiàn)了關(guān)鍵目標(biāo)。我們?yōu)楣こ處熀头枪こ處焺?chuàng)建了統(tǒng)一平臺(tái),用于運(yùn)行整車仿真、后處理結(jié)果和創(chuàng)建報(bào)告。
2024-01-10 18:22:52782 
12月下旬,芯驛電子 AUMO 應(yīng)邀參加在上海 IM 智能創(chuàng)新中心舉辦的“智己汽車創(chuàng)新技術(shù)展”,展示的多款自動(dòng)駕駛仿真測(cè)試 HIL 相關(guān)解決方案、電子后視鏡等產(chǎn)品引發(fā)關(guān)注,現(xiàn)場(chǎng)與智己汽車多名研發(fā)人員深入交流。
2024-01-10 16:59:15661 隨著汽車處理器技術(shù)的發(fā)展,VCU逐漸從16位處理器芯片過(guò)渡到32位處理器芯片,32位處理器芯片已經(jīng)成為行業(yè)的主流產(chǎn)品。
2024-01-09 13:59:29293 
汽車電機(jī)控制器是一種電氣控制設(shè)備,它可以實(shí)現(xiàn)對(duì)汽車電機(jī)的轉(zhuǎn)速、轉(zhuǎn)矩和位置等參數(shù)的控制。在電動(dòng)汽車、混合動(dòng)力汽車等領(lǐng)域中,汽車電機(jī)控制器起著非常重要的作用。本文將對(duì)汽車電機(jī)控制器的組成進(jìn)行詳細(xì)介紹
2024-01-05 16:44:00278 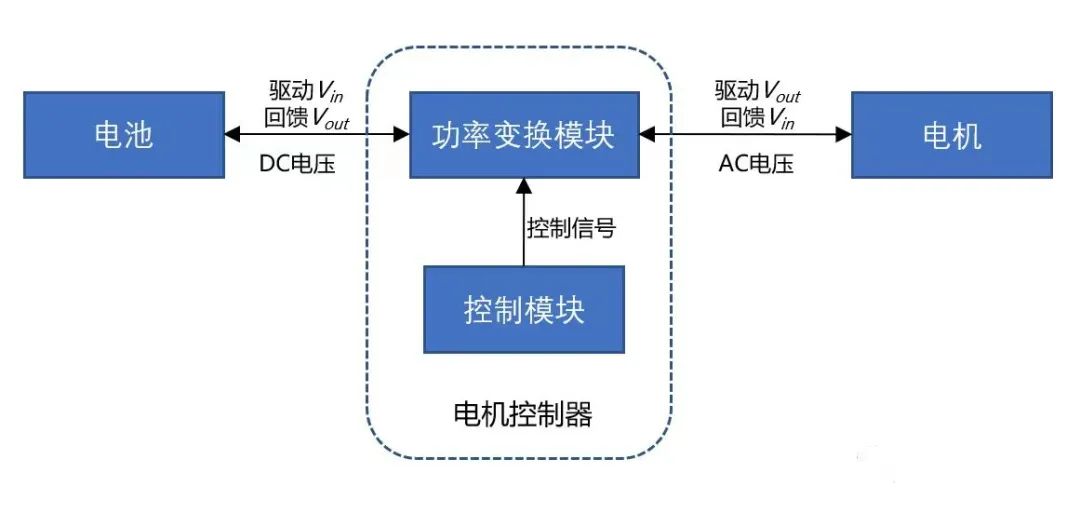
,其中尤以汽車行業(yè)HiL應(yīng)用市場(chǎng)規(guī)模占比最高,預(yù)期可達(dá)到123.8億元 出品:適道研究院 ? 半實(shí)物仿真(Hardware-in-Loop Simulation,簡(jiǎn)稱HiL)是一種結(jié)合實(shí)物硬件和仿真軟件的實(shí)時(shí)仿真技術(shù)。這種仿真方法通過(guò)在仿真系統(tǒng)的回路中接入實(shí)物部件,實(shí)現(xiàn)對(duì)系統(tǒng)性能的綜合考察和驗(yàn)證。
2024-01-03 22:22:42198 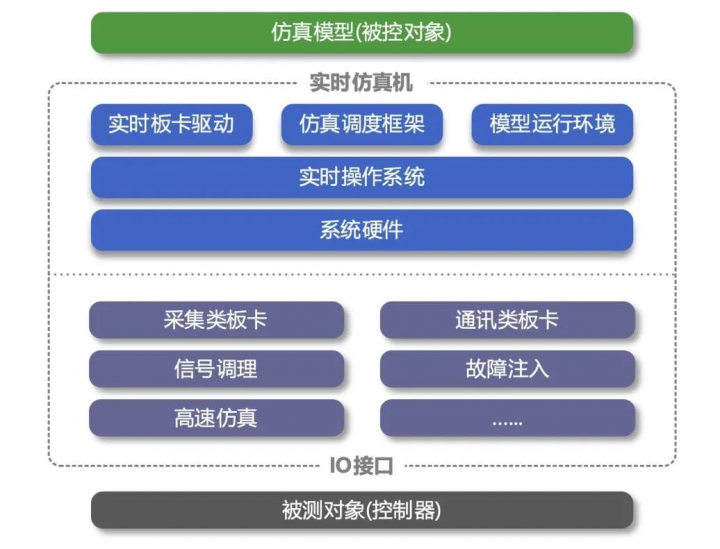
純電動(dòng)汽車的整車控制系統(tǒng)和電池管理系統(tǒng)是車輛中兩個(gè)至關(guān)重要的系統(tǒng),它們分別承擔(dān)著不同的功能。
2024-01-03 11:12:21249 一、整車高低溫試驗(yàn)室簡(jiǎn)介 整車高低溫試驗(yàn)室是各家車企用于檢測(cè)和評(píng)估汽車在不同溫度環(huán)境下的性能和耐用性。整車高低溫試驗(yàn)室具備模擬多種氣候條件的能力,包括高溫、低溫和溫度極速變化
2023-12-20 14:57:01
與Enclustra公司合作,MicroNova公司在為汽車環(huán)境和其他市場(chǎng)的電子控制單元(ECU)開(kāi)發(fā)最先進(jìn)的硬件在環(huán)(HiL)測(cè)試系統(tǒng)方面一直處于領(lǐng)先地位。除了高質(zhì)量、高可靠性和高性能之外
2023-12-20 08:09:48407 
汽車T-BOX與域控制器的HIL測(cè)試新方案Q:目前全球一共只有100多顆衛(wèi)星,為什么你們的模擬器需要模擬那么多的通道?有什么應(yīng)用嗎?衛(wèi)星數(shù)量和模擬仿真通道不是等同的
2023-12-14 09:28:15588 
和驗(yàn)證變流器的性能是非常重要的。基于半實(shí)物仿真支持任意拓?fù)淠P痛罱ㄇ腋叨染_的特點(diǎn),采用HIL半實(shí)物硬件在環(huán)進(jìn)行風(fēng)電機(jī)組變流器在環(huán)測(cè)試已逐漸成為主流趨勢(shì)。EasyGo采用基于CPU+FPGA的HIL實(shí)時(shí)
2023-12-13 17:54:37
的時(shí)間并分階段完成。階段-1系統(tǒng)由以下元件組成:HILS(硬件在環(huán)仿真)引擎、機(jī)器人和圖像處理系統(tǒng)。開(kāi)發(fā)HILS引擎的NI HILS系統(tǒng)由PXI(用于儀器的PCI擴(kuò)展)產(chǎn)品和RIO(可重配置的I/O
2023-11-29 18:28:37
借助NI開(kāi)放式、數(shù)據(jù)驅(qū)動(dòng)型、軟件互連的生態(tài)系統(tǒng)以及PXI功能,采埃孚能夠開(kāi)發(fā)可擴(kuò)展的ADAS HIL系統(tǒng),在滿足未來(lái)需求的同時(shí)與測(cè)試項(xiàng)目的步伐保持一致。
2023-11-29 10:43:33285 
本文分享的是一個(gè)案例,借助NI開(kāi)放式、數(shù)據(jù)驅(qū)動(dòng)型、軟件互連的生態(tài)系統(tǒng)以及PXI功能,采埃孚能夠開(kāi)發(fā)可擴(kuò)展的ADAS HIL系統(tǒng),在滿足未來(lái)需求的同時(shí)與測(cè)試項(xiàng)目的步伐保持一致。 目前,采埃孚的ADAS HIL測(cè)試系統(tǒng)原型已復(fù)制至HIL集群的多個(gè)系統(tǒng)中,在多個(gè)軟件測(cè)試周期中構(gòu)建了全自動(dòng)化驗(yàn)證系統(tǒng)。
2023-11-27 09:52:28237 
,對(duì)系統(tǒng)運(yùn)行的原理有更直觀的認(rèn)識(shí)。④上位機(jī)。用于運(yùn)行DeskSim實(shí)時(shí)仿真軟件,將不同模型部署到不同的硬件平臺(tái)上,并對(duì)算法模型進(jìn)行配置與實(shí)時(shí)監(jiān)控。
2.1 核心產(chǎn)品——快速控制器CBoxCBox是一款
2023-11-16 16:26:22
能夠安全、可靠地工作,并滿足各種應(yīng)用場(chǎng)景的需求。采用HIL半實(shí)物硬件在環(huán)進(jìn)行光伏變流器在環(huán)測(cè)試已逐漸成為主流趨勢(shì)。EasyGo采用基于CPU+FPGA的HIL實(shí)時(shí)仿真器,可以幫助企業(yè)工程師進(jìn)行如下光伏
2023-11-09 14:54:09
嵌入式軟件的HIL測(cè)試需要復(fù)雜的測(cè)試系統(tǒng)及完整的ECU硬件,這導(dǎo)致通常只能在開(kāi)發(fā)流程的后期階段進(jìn)行測(cè)試。全新推出的低成本解決方案VIOSystem,使得在開(kāi)發(fā)前期不僅可以進(jìn)行總線通訊測(cè)試,也可以同時(shí)
2023-11-09 08:25:57278 
在單片機(jī)系統(tǒng)中控制器的組成和作用
2023-11-03 07:03:37
嵌入式軟件的HIL測(cè)試需要復(fù)雜的測(cè)試系統(tǒng)及完整的ECU硬件,這導(dǎo)致通常只能在開(kāi)發(fā)流程的后期階段進(jìn)行測(cè)試。全新推出的低成本解決方案VIO System,使得在開(kāi)發(fā)前期不僅可以進(jìn)行總線通訊測(cè)試,也可以同時(shí)進(jìn)行I/O信號(hào)測(cè)試。
2023-11-02 17:08:41234 
嵌入式系統(tǒng)軟件配置項(xiàng)和系統(tǒng)測(cè)試時(shí)需要構(gòu)建出半實(shí)物仿真測(cè)試環(huán)境(Hardawre in Loop Simution Test Platform,HIL),與被測(cè)系統(tǒng)(Unit Under Test
2023-10-31 16:10:15571 
新能源汽車電機(jī)綜合測(cè)試系統(tǒng)測(cè)試用于純電動(dòng)汽車用電機(jī)、電機(jī)控制器、差減速器等產(chǎn)品檢驗(yàn)和故障分析,該系統(tǒng)能夠滿足型式試驗(yàn)和耐久試驗(yàn)要求、電控系統(tǒng)試驗(yàn)和車用電機(jī)以及動(dòng)力電池組在動(dòng)力系統(tǒng)中的性能試驗(yàn)及優(yōu)化
2023-10-28 10:22:02
及電機(jī)控制器、冷卻循環(huán)系統(tǒng)、電池包及BMS管理系統(tǒng)、整車控制器VCU等核心零部件及系統(tǒng)功能驗(yàn)證和系統(tǒng)開(kāi)發(fā),能滿足新能源電動(dòng)汽車驅(qū)動(dòng)電機(jī)系統(tǒng)在試驗(yàn)臺(tái)架上進(jìn)行的穩(wěn)態(tài)/瞬態(tài)
2023-10-28 10:10:01
電子發(fā)燒友網(wǎng)站提供《純電動(dòng)汽車交流異步電機(jī)及整車總成控制器的開(kāi)發(fā)技術(shù)研究.pdf》資料免費(fèi)下載
2023-10-26 10:06:44 0
0 本應(yīng)用筆記為使用AT32系列微控制器芯片的硬件設(shè)計(jì)人員提供參考設(shè)計(jì),包括供電電源要求、時(shí)鐘管理、復(fù)位管理、調(diào)試接口的管理。它說(shuō)明了使用AT32系列微控制器芯片所需的最低硬件資源。文中介紹了有關(guān)硬件
2023-10-25 07:54:01
,因此,市場(chǎng)迫切需要一款集成度更高,性價(jià)比更加出色的硬件在環(huán)仿真系統(tǒng)。經(jīng)緯恒潤(rùn)作為國(guó)內(nèi)早期開(kāi)展硬件在環(huán)仿真測(cè)試系統(tǒng)開(kāi)發(fā)的供應(yīng)商之一,在掌握了硬件、軟件、模型、實(shí)時(shí)系
2023-10-10 09:24:45507 
和工程師可以更準(zhǔn)確地評(píng)估微電網(wǎng)系統(tǒng)在不同工況下的運(yùn)行特性,預(yù)測(cè)和驗(yàn)證系統(tǒng)的穩(wěn)定性、可靠性和經(jīng)濟(jì)性。此外,實(shí)時(shí)仿真還可以用于測(cè)試和驗(yàn)證不同的控制策略,以優(yōu)化微電網(wǎng)的能源管理、功率調(diào)度和供需平衡。微電網(wǎng)的系統(tǒng)
2023-09-26 10:22:11
電機(jī)控制器的組成及作用電機(jī)控制器是用于控制和驅(qū)動(dòng)電動(dòng)機(jī)運(yùn)行的設(shè)備,它通常由以下幾個(gè)組成部分組成:1.電源(PowerSupply):為電動(dòng)機(jī)控制器提供所需的電能,通常是直流或交流電源。2.控制
2023-09-24 08:08:581379 
電機(jī)控制器是用于控制和驅(qū)動(dòng)電動(dòng)機(jī)運(yùn)行的設(shè)備,它通常由以下幾個(gè)組成部分組成:
1. 電源(Power Supply):為電動(dòng)機(jī)控制器提供所需的電能,通常是直流或交流電源。
2. 控制
2023-09-21 15:52:352578 電子發(fā)燒友網(wǎng)站提供《動(dòng)力總成HIL測(cè)試的主要考量因素.pdf》資料免費(fèi)下載
2023-09-18 10:29:010 概述世界知名的模擬與驗(yàn)證方案廠商dSPACE借助虹科SafranGNSS模擬器實(shí)現(xiàn)了一套基于GNSS的駕駛功能HIL仿真系統(tǒng),該系統(tǒng)可以用于自動(dòng)駕駛、車聯(lián)網(wǎng)、智能座艙等各類汽車行業(yè)應(yīng)用,并具備極大
2023-09-16 08:16:53406 
概述世界知名的模擬與驗(yàn)證方案廠商dSPACE借助虹科SafranGNSS模擬器實(shí)現(xiàn)了一套基于GNSS的駕駛功能HIL仿真系統(tǒng),該系統(tǒng)可以用于自動(dòng)駕駛、車聯(lián)網(wǎng)、智能座艙等各類汽車行業(yè)應(yīng)用,并具備極大
2023-09-16 08:11:20299 
環(huán)控制器基于系統(tǒng)數(shù)學(xué)模型和當(dāng)前狀態(tài)生成控制信號(hào)。 系統(tǒng)將自動(dòng)通過(guò)反饋信號(hào)修改為理想狀態(tài)。 近身環(huán)系統(tǒng)強(qiáng)度優(yōu)于開(kāi)放環(huán)系統(tǒng)。 但是, 如果系統(tǒng)不需要高精度, 它可以在開(kāi)放環(huán)控制器上執(zhí)行 。
該示例代碼
2023-09-01 06:46:16
歡迎來(lái)到本次直播,我們將帶您深入了解新能源汽車三電(電池、電機(jī)、電控)HIL測(cè)試系統(tǒng)方案的前沿科技和應(yīng)用。作為在測(cè)試行業(yè)深耕多年的公司,我們將深入探討如何通過(guò)HiL系統(tǒng)實(shí)現(xiàn)對(duì)新能源汽車核心技術(shù)的高效測(cè)試和驗(yàn)證,確保其在道路上的卓越性能和可靠性。
2023-08-30 09:01:03533 
。
PCS控制器在環(huán)測(cè)試
通過(guò)進(jìn)行PCS控制器的在環(huán)測(cè)試,可以確保其在實(shí)際應(yīng)用中能夠安全、可靠地工作,并滿足各種應(yīng)用場(chǎng)景的需求。基于半實(shí)物仿真支持任意拓?fù)淠P痛罱ㄇ腋叨染_的特點(diǎn),采用HIL半實(shí)物
2023-08-25 11:09:55
視頻暗箱是將虛擬仿真場(chǎng)景視頻信號(hào)連接到暗箱中的顯示器上,使用真實(shí)攝像頭對(duì)著顯示器拍攝視頻,通過(guò)同軸線纜將拍攝到的視頻信號(hào)傳輸給自動(dòng)駕駛控制器,使控制器認(rèn)為處于實(shí)車環(huán)境中,從而達(dá)到對(duì)ADAS控制器測(cè)試的目的。
2023-08-25 09:10:37335 
M487KMCAN方案,以M487KMCAN單芯片作為核心控制器,內(nèi)建2560KB FLASH可存放大量字庫(kù)。在通訊方面,可透過(guò)UART串口或USB與計(jì)算機(jī)等上位機(jī)通訊,以UART串口連接藍(lán)芽或WIFI
2023-08-25 08:02:25
流量與壓力可控,可以對(duì)目前設(shè)計(jì)的電機(jī)及控制器進(jìn)行測(cè)試。系統(tǒng)由水泵、變頻、LSPTS、水箱、高精度流量計(jì)、高精度壓力計(jì)、電控單元、操作軟件組成。技術(shù)指標(biāo):1)溫度:5~40℃,2)介質(zhì):純凈水或無(wú)腐蝕
2023-08-23 15:58:16
環(huán)控制器基于系統(tǒng)數(shù)學(xué)模型和當(dāng)前狀態(tài)生成控制信號(hào)。 系統(tǒng)將自動(dòng)通過(guò)反饋信號(hào)修改為理想狀態(tài)。 近身環(huán)系統(tǒng)強(qiáng)度優(yōu)于開(kāi)放環(huán)系統(tǒng)。 但是, 如果系統(tǒng)不需要高精度, 它可以在開(kāi)放環(huán)控制器上執(zhí)行 。
該示例代碼
2023-08-23 07:30:42
環(huán)控制器是一個(gè)簡(jiǎn)單的系統(tǒng)數(shù)學(xué)模型。 因?yàn)闆](méi)有反饋信號(hào)可以自動(dòng)修改自己到理想狀態(tài)。 開(kāi)放環(huán)控制器的堅(jiān)固性比近環(huán)系統(tǒng)差。 但是, 如果系統(tǒng)不需要高精度, 它可以在開(kāi)放環(huán)控制器上執(zhí)行 。
該示例代碼以開(kāi)路
2023-08-23 06:11:34
針腳,支持IO靈活配置,可根據(jù)用戶需求來(lái)靈活配置不同的模塊滿足需求,助力完成不同規(guī)模電力電子系統(tǒng)的仿真測(cè)試。■ 多功能實(shí)時(shí)仿真
既可以做快速原型控制應(yīng)用,又可以做硬件在環(huán)測(cè)試,也可以同時(shí)一機(jī)多用
2023-08-16 17:29:37
VCU(Vehicle Control Unit)即整車控制器,是如今新能源汽車控制系統(tǒng)的核心控制單元。它就像是整車的大腦一樣,采集輸入信號(hào),輸出負(fù)載控制信號(hào),協(xié)調(diào)各個(gè)控制系統(tǒng)工作并且提供監(jiān)控檢測(cè)功能,來(lái)為整車的正常運(yùn)行提供完善的控制邏輯。
2023-08-09 11:33:431016 文章介紹了汽車控制器的硬件內(nèi)容,其詳盡程度對(duì)于非軟硬件開(kāi)發(fā)人員來(lái)說(shuō)基本夠用。當(dāng)你看到下面一個(gè)控制器實(shí)物,至少知道有點(diǎn)感覺(jué),會(huì)認(rèn)識(shí)其中的一些電子器件,他們用來(lái)做什么。
2023-08-02 17:00:36604 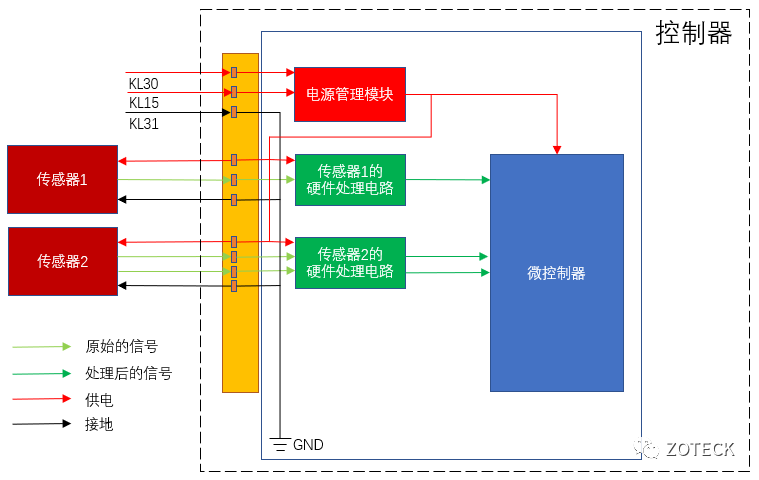
PrimeCell靜態(tài)存儲(chǔ)器控制器(SMC)是一款符合高級(jí)微控制器總線架構(gòu)(AMBA)的片上系統(tǒng)(SoC)外圍設(shè)備,由ARM有限公司開(kāi)發(fā)、測(cè)試和許可。
SMC是一個(gè)AMBA從模塊,連接到高級(jí)高性能
2023-08-02 12:21:46
能夠服務(wù)于汽車電子零部件的仿真測(cè)試,也能支持系統(tǒng)級(jí)和整車級(jí)的測(cè)試。經(jīng)緯恒潤(rùn)汽車電子測(cè)試業(yè)務(wù)發(fā)展十余年,現(xiàn)已能夠提供覆蓋汽車電子測(cè)試的完整工具鏈和測(cè)試服務(wù),是面向軟件、模型
2023-08-01 08:00:35691 ,進(jìn)而實(shí)現(xiàn)對(duì)電機(jī)扭矩/轉(zhuǎn)速的控制。為了在軟/硬件開(kāi)發(fā)前期快速驗(yàn)證應(yīng)用層算法功能及基礎(chǔ)軟件質(zhì)量,同時(shí)實(shí)現(xiàn)極限工況驗(yàn)證和復(fù)雜場(chǎng)景復(fù)現(xiàn),硬件在環(huán)(HIL)測(cè)試在整個(gè)電機(jī)
2023-07-31 23:32:06948 能夠服務(wù)于汽車電子零部件的仿真測(cè)試,也能支持系統(tǒng)級(jí)和整車級(jí)的測(cè)試。經(jīng)緯恒潤(rùn)汽車電子測(cè)試業(yè)務(wù)發(fā)展十余年,現(xiàn)已能夠提供覆蓋汽車電子測(cè)試的完整工具鏈和測(cè)試服務(wù),是面向軟件、模型、代碼、原型、產(chǎn)品、網(wǎng)絡(luò)、仿真、臺(tái)架、實(shí)
2023-07-31 17:23:52651 個(gè)準(zhǔn)確可靠,簡(jiǎn)單便攜,可為企業(yè)提供高效、安全的測(cè)試平臺(tái)來(lái)做半實(shí)物測(cè)試。
本次使用客戶港迪電氣選定了 Easygo 仿真平臺(tái)進(jìn)行實(shí)物控制板的硬件在環(huán)(HIL)仿真測(cè)試,判斷部分替代實(shí)物進(jìn)行軟件(算法
2023-07-28 11:39:58
VCU 整車控制器是用在純電車型中的控制器,其功能類似于燃油車的發(fā)動(dòng)機(jī)控制器(EMS),是新能源車輛控制系統(tǒng)中的“大腦級(jí)”控制器。在某些插電式混合動(dòng)力車型中,也會(huì)用到整車控制器。整車控制器的主要功能
2023-07-19 10:01:011342 作為本土20年的汽車電子系統(tǒng)科技服務(wù)商,經(jīng)緯恒潤(rùn)結(jié)合多年業(yè)務(wù)經(jīng)驗(yàn),自主研發(fā),經(jīng)過(guò)內(nèi)外部驗(yàn)證,正式對(duì)外發(fā)布綜合駕駛測(cè)試仿真軟件——ModelBase-AD。ModelBase-AD版,具備車輛動(dòng)力學(xué)
2023-07-17 17:20:04485 
----整車電路的組成---- 車輛電路的構(gòu)成一般包括電源電路、起動(dòng)電路、點(diǎn)火電路、照明與燈光信號(hào)裝置電路、儀表信息系統(tǒng)電路、輔助裝置電路和電子控制系統(tǒng)電路。 1、電源電路,也叫充電電路,由蓄電池
2023-07-14 17:56:401225 在智駕HiL應(yīng)用階段,激光點(diǎn)云數(shù)據(jù)在實(shí)現(xiàn)L2+或L3級(jí)功能測(cè)試的過(guò)程中尤為重要,在獲取到激光雷達(dá)仿真的點(diǎn)云數(shù)據(jù)后,可使用CANoe進(jìn)行智駕域控制器的閉環(huán)驗(yàn)證。
2023-07-14 09:24:19334 
2023年,聯(lián)合電子,緊密基于新能源車輛日益增長(zhǎng)的跨域融合控制需求,推出了面向跨域融合的整車運(yùn)動(dòng)域控制器VCU8.5平臺(tái),為新能源汽車的“車輛運(yùn)動(dòng)融合控制”提供初步的探索
2023-07-03 10:07:41593 
講到這個(gè)問(wèn)題先講講,什么是域控制器。域控制器的概念是伴隨著整車電子電器架構(gòu)的發(fā)展演變而來(lái)的。由于整車電子電器的日益復(fù)雜,傳統(tǒng)的分布式架構(gòu)已經(jīng)無(wú)法滿足日益增長(zhǎng)的計(jì)算需求,也導(dǎo)致冗長(zhǎng)的線束。
2023-06-25 16:04:011093 
Hardware-in-the-Loop(硬件在環(huán),HIL)測(cè)試是一種強(qiáng)大的工具,用于驗(yàn)證和核實(shí) 包括機(jī)器人技術(shù)和計(jì)算機(jī)視覺(jué)在內(nèi)的 復(fù)雜系統(tǒng)的性能。本文探討了 HIL 測(cè)試是如何通過(guò) NVIDIA
2023-06-14 18:35:02332 
近年來(lái),隨著新能源汽車的大規(guī)模推廣應(yīng)用,新能源汽車控制系統(tǒng)及零部件的開(kāi)發(fā)與測(cè)試技術(shù)也得到了快速發(fā)展,但同時(shí)市場(chǎng)競(jìng)爭(zhēng)也越來(lái)越激烈,消費(fèi)者對(duì)新能源汽車的駕乘感受及安全要求也越來(lái)越高。
2023-06-14 17:08:561094 
整車控制器是電動(dòng)汽車正常行駛的控制中樞,是整車控制系統(tǒng)的核心部件,是純電動(dòng)汽車的正常行駛、再生制動(dòng)能量回收、故障診斷處理和車輛狀態(tài)監(jiān)視等功能的主要控制部件。
2023-06-13 11:06:251453 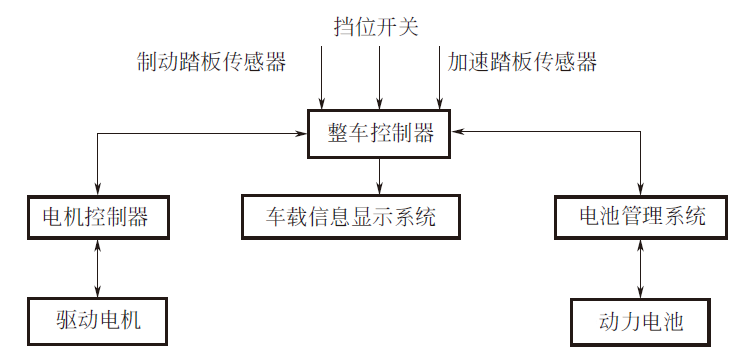
作為國(guó)內(nèi)最早開(kāi)展整車在環(huán)仿真測(cè)試技術(shù)預(yù)研的企業(yè)之一,經(jīng)緯恒潤(rùn)自2016年起,正式啟動(dòng)了整車在環(huán)仿真相關(guān)技術(shù)的預(yù)研工作。整車在環(huán)實(shí)現(xiàn)了從半實(shí)物仿真到機(jī)械混合仿真的跨步,將功能測(cè)試與性能測(cè)試打包整合
2023-06-12 10:02:39453 對(duì)于汽車控制器的硬件設(shè)計(jì)來(lái)說(shuō),供電系統(tǒng)是非常重要的組成部分。本文主要介紹傳感器、微控制器、執(zhí)行器、通訊的供電。
2023-06-11 17:24:40867 
功能,縮短開(kāi)發(fā)周期,數(shù)字云儲(chǔ)選用了Easygo 仿真平臺(tái)進(jìn)行硬件在環(huán)(HIL)仿真測(cè)試的試用。對(duì)此,將基于 easygo netbox 實(shí)時(shí)仿真器搭建仿真測(cè)試系統(tǒng),按照規(guī)程對(duì)微網(wǎng)儲(chǔ)能孤島運(yùn)行程序進(jìn)行驗(yàn)證
2023-06-08 14:57:16
新能源車整車控制器(VCU)系統(tǒng)框圖,功能拆解及供應(yīng)商排名
2023-06-07 11:40:56638 
作為國(guó)內(nèi)最早開(kāi)展整車在環(huán)仿真測(cè)試技術(shù)預(yù)研的企業(yè)之一,經(jīng)緯恒潤(rùn)自2016年起,正式啟動(dòng)了整車在環(huán)仿真相關(guān)技術(shù)的預(yù)研工作。整車在環(huán)實(shí)現(xiàn)了從半實(shí)物仿真到機(jī)械混合仿真的跨步,將功能測(cè)試與性能測(cè)試打包整合
2023-06-07 10:16:24490 對(duì)于電子控制器來(lái)說(shuō),在整個(gè)生命周期內(nèi)很難避免完全不發(fā)生復(fù)位,比如VCU自身內(nèi)部導(dǎo)致的硬件復(fù)位、軟件復(fù)位,以及外部干擾導(dǎo)致的復(fù)位等。
2023-06-03 09:43:11716 
“EasyGo 仿真平臺(tái),模型下載時(shí)間短,操作簡(jiǎn)便,運(yùn)行速度快,不僅支持電路模型元件(如電機(jī)仿真模型、逆變橋模型等),還支持?jǐn)?shù)學(xué)計(jì)算,邏輯比較模塊自由搭建,確實(shí)很方便易用。”
2023-06-02 14:19:51251 
當(dāng)前電子電器架構(gòu)從過(guò)去的分布式架構(gòu)到今天的域控架構(gòu),以及未來(lái)向集中式中央計(jì)算平臺(tái)架構(gòu)發(fā)展演變。本期北匯將針對(duì)電子電器架構(gòu)變化下的智駕域控,結(jié)合智駕背景知識(shí)和技術(shù)發(fā)展,為大家介紹基于域控的智能駕駛HiL測(cè)試系統(tǒng)解決方案。
2023-05-26 10:15:14412 
特別是對(duì)于整車控制器VCU,很多動(dòng)力相關(guān)的部件都受其控制。并且在正常情況下,如果要進(jìn)入行車就緒狀態(tài),一般需要至少兩個(gè)不同的操作(如踩剎車、按啟動(dòng)按鈕、換擋等)。
2023-05-22 11:05:001814 
使用測(cè)試框架啟動(dòng)模型的 PIL 測(cè)試時(shí),出現(xiàn)以下錯(cuò)誤:
無(wú)法為“State_Machine”執(zhí)行處理器在環(huán) (PIL) 仿真。修復(fù)此錯(cuò)誤,更新配置參數(shù)或創(chuàng)建支持的連接配置。請(qǐng)參閱產(chǎn)品幫助中的配置
2023-05-22 07:44:24
作為車輛驅(qū)動(dòng)協(xié)調(diào)控制系統(tǒng)的核心控制器,VCU需要負(fù)責(zé)整車狀態(tài)協(xié)調(diào)、駕駛員駕駛需求實(shí)現(xiàn)等最基本也是最重要的功能。因此VCU軟件的完善度直接影響了車輛運(yùn)行的穩(wěn)定性和行駛安全性。
2023-05-15 12:46:27946 
作者|西紅柿雞蛋面小編|吃不飽CANoe是進(jìn)行網(wǎng)絡(luò)和ECU開(kāi)發(fā)、測(cè)試和分析的專業(yè)工具,支持從需求分析到系統(tǒng)實(shí)現(xiàn)的整個(gè)系統(tǒng)開(kāi)發(fā)過(guò)程。從CANoe12.0開(kāi)始,CANoe新增了充電功能
2023-05-12 10:22:311042 路燈控制系統(tǒng)有三部分組成:數(shù)據(jù)采集控制終端-單燈控制器,數(shù)據(jù)管理器-(集中管理器),數(shù)據(jù)處理中心-監(jiān)控中心。
2023-05-06 16:04:302191 
控制器通常包括CPU、存儲(chǔ)器、輸入輸出接口、定時(shí)器、ADC、DAC等模塊,能夠?qū)崿F(xiàn)各種控制、計(jì)算、數(shù)據(jù)處理等功能。 相對(duì)于傳統(tǒng)的計(jì)算機(jī)系統(tǒng)而言,MCU控制器具有體積小、功耗低、性價(jià)比高等優(yōu)點(diǎn),因此在
2023-05-05 14:59:21
在新能源汽車的整個(gè)平臺(tái)架構(gòu)中,VCU (Vehicle ControlUnit 整車控制器)、MCU(Moter ControlUnit 電機(jī)控制器)和 BMS
2023-05-05 14:18:4515 對(duì)于汽車控制器的硬件設(shè)計(jì)來(lái)說(shuō),供電系統(tǒng)是非常重要的組成部分。本文主要介紹傳感器、微控制器、執(zhí)行器、通訊的供電。
2023-05-04 10:03:28854 
控制器的組成部件 控制器由程序計(jì)數(shù)器、指令寄存器、指令譯碼器、時(shí)序產(chǎn)生器和操作控制器組成。 控制器分組合邏輯控制器和微程序控制器,兩種控制器各有長(zhǎng)處和短處。組合邏輯控制器設(shè)計(jì)麻煩,結(jié)構(gòu)復(fù)雜,一旦
2023-04-28 11:10:113460 當(dāng)我使用 PE 微型調(diào)試器在微控制器中閃存程序時(shí),我們在 216 處收到以下錯(cuò)誤 ieruntime 錯(cuò)誤并且 GDB 已終止,因此我們無(wú)法在控制器中閃存程序。請(qǐng)解決問(wèn)題
2023-04-17 06:03:53
,國(guó)電南瑞某分公司選定了 Easygo 仿真平臺(tái)進(jìn)行實(shí)物控制器的硬件在環(huán)(HIL)仿真測(cè)試的試用。對(duì)此,將基于 easygo netbox 實(shí)時(shí)仿真器搭建仿真測(cè)試系統(tǒng),按照規(guī)程對(duì)出廠前的控制器進(jìn)行完整
2023-04-14 14:32:58
貞光科技從車規(guī)微處理器MCU、功率器件、電源管理芯片、信號(hào)處理芯片、存儲(chǔ)芯片、二、三極管、光耦、晶振、阻容感等汽車電子元器件為客戶提供全產(chǎn)業(yè)鏈供應(yīng)解決方案!一、國(guó)外產(chǎn)品介紹(1)豐田公司整車控制器
2023-04-13 09:15:371191 
大家好,有沒(méi)有簡(jiǎn)單的方法可以判斷控制器在生產(chǎn)車間是否正常?我們可以有一些生產(chǎn)裝置可以告訴一些產(chǎn)品功能是好的。我們正在尋找一些基于硬件/軟件的測(cè)試,以確保 NXP 微控制器正常且未被篡改。 我們?cè)谶@
2023-04-11 08:25:09
先生,我正在使用 s32k144 控制器,我需要執(zhí)行開(kāi)機(jī)內(nèi)置測(cè)試 (PBIT)。要執(zhí)行 CAN 測(cè)試,如何配置內(nèi)部環(huán)回。測(cè)試后 CAN 模塊應(yīng)與其他控制器通信。請(qǐng)幫我。
2023-04-07 09:52:19
其整車控制器接收駕駛員的操作信號(hào)和汽車的運(yùn)動(dòng)傳感器信號(hào),其中駕駛員的操作信號(hào)包括加速踏板信號(hào)、制動(dòng)踏板信號(hào)、換檔位置信號(hào)和轉(zhuǎn)向角度信號(hào),汽車的運(yùn)動(dòng)傳感器信號(hào)包括橫擺角速度信號(hào)、縱向加速信號(hào)、橫向加速信號(hào)和4個(gè)車輪的轉(zhuǎn)速信號(hào)。
2023-03-31 11:42:411567 簡(jiǎn)述 直接功率控制時(shí)一種將瞬時(shí)有功功率、無(wú)功功率用于PWM變換器閉環(huán)控制系統(tǒng)中的新型控制策略。直接功率控制(Direct Power Control, DPC) 的控制策略與通常的電流控制策略
2023-03-29 16:35:45
DAP仿真器 BURNER
2023-03-28 13:06:20
電機(jī)控制系統(tǒng)是指通過(guò)對(duì)電機(jī)的電流、電壓、轉(zhuǎn)速、位置等參數(shù)進(jìn)行控制,調(diào)節(jié)電機(jī)運(yùn)行狀態(tài)的系統(tǒng)。它通常由硬件和軟件兩部分組成,包括電機(jī)驅(qū)動(dòng)器、傳感器、控制器、編碼器等組件以及相應(yīng)的控制算法。其主要功能是控制電機(jī)的運(yùn)行、保護(hù)電機(jī)、實(shí)現(xiàn)各種運(yùn)動(dòng)模式和控制模式等。
2023-03-24 17:45:095630 。 1.1.2 全油門加速(電機(jī)轉(zhuǎn)速1000-7000rpm)車內(nèi)振動(dòng)測(cè)試結(jié)果 電機(jī)轉(zhuǎn)速在1000-7000rpm加速過(guò)程,座椅導(dǎo)軌振動(dòng)20-65mg(15-1000Hz),振動(dòng)的峰值基本由20Hz的低頻貢獻(xiàn)
2023-03-23 16:43:08
;MCU MC9512XEP100MAG負(fù)責(zé)發(fā)送指令及與整車各控制器進(jìn)行CAN通訊。 二、低壓區(qū) 首先對(duì)低壓電路也就是控制器左邊的電路部分進(jìn)行分析,主要包括最小電路系統(tǒng)、電源電路、驅(qū)動(dòng)電路、實(shí)時(shí)
2023-03-23 16:33:01
問(wèn)題。 下面僅從仿真的角度來(lái)看這個(gè)問(wèn)題,在第一次測(cè)試:系統(tǒng)工作在低于諧振頻率,不加斜率補(bǔ)償,掃描電壓電壓設(shè)置到輸出電壓的頻率響應(yīng)分析: (峰值電壓控制方法的開(kāi)環(huán)測(cè)試) 運(yùn)行,可見(jiàn)在27.5KHZ處
2023-03-23 14:32:38
用于雙電池系統(tǒng)的PowerPath控制器
2023-03-23 04:53:45
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論