 電子發(fā)燒友App
電子發(fā)燒友App


1 GPS系統(tǒng)簡(jiǎn)介
GPS是Global Positioning System 的縮寫,即全球定位系統(tǒng)。其目的是在全球范圍內(nèi)對(duì)地面和空中目標(biāo)進(jìn)行準(zhǔn)確定位和監(jiān)測(cè)。隨著全球性空間定位信息應(yīng)用的日益廣泛,GPS提供的全時(shí)域、全天候、高精度定位服務(wù)將給空間技術(shù)、地球物理、大地測(cè)繪、遙感技術(shù)、交通調(diào)度、軍事作戰(zhàn)以及人們的日常生活帶來(lái)巨大的變化和深遠(yuǎn)的影響。
目前的民用GPS設(shè)備包括測(cè)量型和導(dǎo)航型。其中測(cè)量型產(chǎn)品的精度可達(dá)到米級(jí)甚至毫米級(jí),但至少需要兩臺(tái)(套)才能達(dá)到設(shè)計(jì)精度要求,而且其內(nèi)部結(jié)構(gòu)復(fù)雜,單機(jī)成本一般在幾萬(wàn)到幾十萬(wàn),適合專業(yè)高精度測(cè)量環(huán)境使用;導(dǎo)航型產(chǎn)品,由于其使用者對(duì)精度要求不高,一般為幾十米,因此機(jī)器內(nèi)部硬件相對(duì)簡(jiǎn)單,只須一臺(tái)就可以完成導(dǎo)航工作,加之其價(jià)格相對(duì)較低,因而更有普及和推廣價(jià)值。
GPS系統(tǒng)一般由地面控制站、導(dǎo)航衛(wèi)星和用戶接收機(jī)三大部分組成。導(dǎo)航衛(wèi)星至少24顆,均勻分布在6個(gè)極地軌道上,軌道的夾角為60度,距地平均高度為20200公里,每12恒星時(shí)繞地球一周。
GPS信號(hào)接收機(jī)的任務(wù)主要是捕獲一定衛(wèi)星高度截止角所選擇的待測(cè)衛(wèi)星的信號(hào),并跟蹤這些衛(wèi)星的運(yùn)行,同時(shí)對(duì)所接收到的GPS信號(hào)進(jìn)行變換、放大和處理,以便測(cè)量出GPS信號(hào)從衛(wèi)星到接收機(jī)天線的傳播時(shí)間,解譯出GPS衛(wèi)星所發(fā)送的導(dǎo)航電文,最終實(shí)時(shí)計(jì)算出現(xiàn)測(cè)站的三維位置、位置、甚至三維速度和時(shí)間。
靜態(tài)定位時(shí),GPS接收機(jī)在捕獲和跟蹤GPS衛(wèi)星的過(guò)程中固定不變,接收機(jī)通過(guò)高精度測(cè)量GPS信號(hào)的傳播時(shí)間,并利用GPS衛(wèi)星在軌的已知位置解算出接收機(jī)天線所在位置的三維坐標(biāo)。而動(dòng)態(tài)定位則是用GPS接收機(jī)測(cè)定一個(gè)運(yùn)動(dòng)物體的運(yùn)行軌跡。GPS信號(hào)接收機(jī)所在的運(yùn)動(dòng)物體叫做載體(如航行中的船艦,空中的飛機(jī),行走的車輛等)。由于載體上的GPS接收機(jī)天線在跟蹤GPS衛(wèi)星的過(guò)程中將相對(duì)地球而運(yùn)動(dòng),這樣,接收機(jī)用GPS信號(hào)就可實(shí)時(shí)地測(cè)量運(yùn)動(dòng)載體的狀態(tài)參數(shù)(瞬間三維位置和三維速度)。
接收機(jī)硬件、機(jī)內(nèi)軟件以及GPS數(shù)據(jù)的后處理軟件包構(gòu)成了完整的GPS用戶設(shè)備。GPS接收機(jī)的結(jié)構(gòu)分為天線單元和接收單元兩大部分。對(duì)于測(cè)地型接收機(jī)來(lái)說(shuō),兩個(gè)單元一般分成兩個(gè)獨(dú)立的部件,觀測(cè)時(shí)將天線單元安置在測(cè)站上,接收單元?jiǎng)t置于測(cè)站附近的適當(dāng)?shù)胤剑⒂秒娎|線將兩者連接成一個(gè)整機(jī)。實(shí)際上,也可以將天線單元和接收單元制作成一個(gè)整體,而在觀測(cè)時(shí)將其安置在測(cè)站點(diǎn)上。
GPS接收機(jī)一般用蓄電池做電源,同時(shí)采用機(jī)內(nèi)機(jī)外兩種直流電源。設(shè)置機(jī)內(nèi)電池的目的在于更換外電池時(shí)不中斷連續(xù)觀測(cè)。在用機(jī)外電池的過(guò)程中,機(jī)內(nèi)電池自動(dòng)充電。關(guān)機(jī)后,機(jī)內(nèi)電池為RAM存儲(chǔ)器供電,以防丟失數(shù)據(jù)。
2 TU-30 GPS模塊簡(jiǎn)介
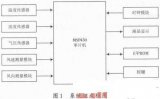
TU-30模塊是美國(guó)羅克韋爾公司的GPS產(chǎn)品,其特點(diǎn)是體積小、接口簡(jiǎn)單、可靠性好。模塊的組織結(jié)構(gòu)是一個(gè)用于接收GPS信號(hào)的單片機(jī)小系統(tǒng)。GPS信號(hào)接收部分由Rockwell自行設(shè)計(jì)開發(fā)的芯片及其外圍電路組成。其控制內(nèi)核是一個(gè)DSP處理器,該處理器具有很強(qiáng)的數(shù)據(jù)運(yùn)算處理能力,并有兩個(gè)串口和時(shí)鐘輸出;外圍電路有實(shí)時(shí)時(shí)鐘,并帶有E2PROM(保存重要參數(shù))、SRAM、ROM等存儲(chǔ)器,可對(duì)相關(guān)重要信息數(shù)據(jù)進(jìn)行存儲(chǔ)、交換;此外,還留有DGPS接口。該模塊的衛(wèi)星采集啟動(dòng)方式分為4種模式:熱啟動(dòng)方式、初始啟動(dòng)方式、冷啟動(dòng)方式、凍結(jié)啟動(dòng)方式;而導(dǎo)航模式則有3維模式、2維模式和DG-PS模式3種。圖1所示是該模塊的硬件結(jié)構(gòu)。
TU-30 GPS模塊留有天線接口,可以用同軸電纜與天線進(jìn)行連接,天線可延長(zhǎng)30米。此外,它還留有20Pin應(yīng)用接口,可方便地與單片機(jī)、PC機(jī)等設(shè)備進(jìn)行接口。
表1 TU-30 GPS的模塊中的20針接口定義

3 GPS模塊的串行數(shù)據(jù)接口規(guī)范
GPS模塊的應(yīng)用關(guān)鍵在于串口通信協(xié)議的制定,也就是模塊的相關(guān)輸入輸出協(xié)議格式。它主要包括數(shù)據(jù)類型與信息格式,其中數(shù)據(jù)類型主要有二進(jìn)制信息和NMEA全國(guó)海洋電子學(xué)會(huì)數(shù)據(jù)信息。這兩類信息可以通過(guò)串口與GPS接收機(jī)進(jìn)行通信。這里重點(diǎn)介紹TU-30的二進(jìn)制信息字格式與字結(jié)構(gòu)。TU-30的傳輸速率為9600bps,無(wú)奇偶校驗(yàn),有8位數(shù)據(jù)位,1位停止位。其二進(jìn)制信息字格式包括信息頭、頭校驗(yàn)、數(shù)據(jù)、數(shù)據(jù)校驗(yàn)等。
TU-30中的每個(gè)信息都有頭,但不一定有數(shù)據(jù),信息的應(yīng)答和請(qǐng)求以頭的形式完成。二進(jìn)制信息頭通常由如下五個(gè)字組成:
Word1:1000 0001 1111 1111;
Word2:信息ID;
Word3:數(shù)據(jù)子計(jì)數(shù);
Word4:應(yīng)答/無(wú)應(yīng)答;
Word5:頭校驗(yàn)。
頭校驗(yàn)計(jì)算公式為:

一般情況下,二進(jìn)制信息數(shù)據(jù)由如下4個(gè)字組成:
Word6:觸發(fā);
Word7:間隔;
Word8:偏移量;
Word9:數(shù)據(jù)校驗(yàn)。
頭校驗(yàn)計(jì)算公式為:

TU-30中的每個(gè)字均為16位,有無(wú)符號(hào)整型和有符號(hào)整形之分。按字長(zhǎng)又可分為單精度(16bit)、雙精度(32bit)和三精度(48bit)。保留位輸入時(shí)為0,獨(dú)立定義位域標(biāo)志位時(shí)可為0或1。
TU-30中的輸出信息如下:
信息位置狀態(tài)輸出(經(jīng)度、緯度、時(shí)間、高度等);
信息ID為1000,信息長(zhǎng)度為55個(gè)字;
ECEF 狀態(tài)輸出:信息ID為1001,信息長(zhǎng)度為54個(gè)字;
通道摘要信息ID為1002,信息長(zhǎng)度為51個(gè)字;
通道測(cè)量信息ID為1007,信息長(zhǎng)度為154個(gè)字;
…
用戶設(shè)置輸出:信息ID為1012,信息長(zhǎng)度為22個(gè)字;
內(nèi)建測(cè)試結(jié)果:信息ID為1100,信息長(zhǎng)度為20個(gè)字;
測(cè)量時(shí)間標(biāo)記:信息ID為1102,信息長(zhǎng)度為253個(gè)字;
串口通信參數(shù):信息ID為1130,信息長(zhǎng)度為21個(gè)字;
EEPROM 狀態(tài): 信息ID為1136,信息長(zhǎng)度為18個(gè)字。
下面是TU-30的輸入信息描述:
測(cè)量位置和速度初始化:信息ID為1200,信息長(zhǎng)度為27個(gè)字。現(xiàn)以此為例來(lái)介紹各信息字的具體含義:
字1~4:信息頭;
5:頭校驗(yàn);
6:序列號(hào);
7:初始化控制;
8~16:GPS時(shí)間、日期;
17~18:緯度;
19~20:經(jīng)度;
21~22:高度;
23~24:對(duì)地速度;
25:衛(wèi)星軌道仰角;
26:爬升率;
27:數(shù)據(jù)校驗(yàn)。

下面是TU-30的其它信息,其具體內(nèi)容可參見(jiàn)相關(guān)文檔。
用戶數(shù)據(jù)定義:信息ID為1210,信息長(zhǎng)度為20個(gè)字;
地圖選擇信息數(shù)據(jù):信息ID為1211,信息長(zhǎng)度為8個(gè)字;
衛(wèi)星仰角屏蔽控制(0~±л/2):信息ID為1212,信息長(zhǎng)度為8個(gè)字;
衛(wèi)星選擇 : 信息ID為1213,信息長(zhǎng)度為10個(gè)字;
差動(dòng)GPS控制:信息ID為1214,信息長(zhǎng)度為9個(gè)字;
冷起動(dòng)控制:信息ID為1216,信息長(zhǎng)度為9個(gè)字;
定位方法校驗(yàn)標(biāo)準(zhǔn):信息ID為1217,信息長(zhǎng)度為13個(gè)字;
無(wú)線類型選擇(主動(dòng)/被動(dòng)):信息ID為1218,信息長(zhǎng)度為8個(gè)字;
用戶登錄高度輸入:信息ID為1219,信息長(zhǎng)度為12個(gè)字;
應(yīng)用平臺(tái)控制(默認(rèn)、靜態(tài)、海洋、陸路、空中):信息ID為1220,信息長(zhǎng)度為8個(gè)字;
串口通信參數(shù)信息:信息ID為1221,信息長(zhǎng)度為15個(gè)字;
導(dǎo)航配置信息:
信息協(xié)議控制:…
以上相關(guān)信息通常都保存到模塊的EEPROM中。
4 與單片機(jī)構(gòu)建的便攜式導(dǎo)航系統(tǒng)
4.1 硬件結(jié)構(gòu)
設(shè)計(jì)時(shí),通常將TU-30模塊的串口1與單片機(jī)的串口相連接,模塊與天線的連接可以加一級(jí)前置放大器。天線可選用東芝天線,也可以專門定制。可選用LCD屏顯示經(jīng)緯度、時(shí)間、高度等數(shù)據(jù)。電源采用4節(jié)堿性電池,易于更換。
MCU可選用德州儀器的MSP430 flash(F13X)系列。MSP430系列為16位單片機(jī),處理速度快,功耗低,體積小,適合在便攜式儀器上使用。同時(shí),MSP430單片機(jī)支持C語(yǔ)言,易于編程。
屏幕菜單采用字符型西文顯示,可縮短開發(fā)時(shí)間、降低成本,很適合于民用;也可以選用大屏幕彩色點(diǎn)陣液晶,它界面友好、美觀,但軟件工作量大,硬件成本高。鍵盤可選擇3個(gè)觸摸鍵,菜單功能全部可用軟件實(shí)現(xiàn)。因?yàn)镸SP430單片機(jī)的電源為3.3V而TU-30的電源為5V,所以需要用DC-DC電源轉(zhuǎn)換模塊進(jìn)行處理。如果采用充電電池則還需要充電電路。GPS模塊與單片機(jī)的接口原理如圖2所示。
4.2 軟件設(shè)計(jì)
圖3所示是TU-30 GPS模塊的軟件流程圖。該軟件的編寫主要是設(shè)置GPS模塊與MCU之間的串口通信、參數(shù)顯示及人機(jī)接口。主要包括初始化、串口通信、數(shù)據(jù)處理、故障提示、顯示、鍵盤處理、電源管理等部分。其中初始化包括MSP430中各種寄存器的配置、串口相關(guān)參數(shù)配置(波特率,模式)及外圍電路(LCD、電源等設(shè)備檢測(cè))的初始化等;
串口通信包括數(shù)據(jù)發(fā)送、接收、校驗(yàn),通信故障提示等;數(shù)據(jù)處理主要是對(duì)接收數(shù)據(jù)的解碼、存儲(chǔ)和數(shù)據(jù)刷新等; 故障提示包括設(shè)備故障、通信故障、電源故障等。電源管理主要是電源欠壓提示和當(dāng)前電源狀態(tài)顯示。

另外,設(shè)計(jì)時(shí)還應(yīng)注意GPS模塊的天線要求,具體有以下兩點(diǎn):
(1)天線增益應(yīng)為30dB,阻抗應(yīng)為50Ω。
(2)無(wú)線頻率信號(hào)環(huán)境方面要求,即RF輸入L1的載波頻率應(yīng)為10MHz,帶寬中心點(diǎn)應(yīng)為0dBW。
5 結(jié)束語(yǔ)
GPS導(dǎo)航設(shè)備的應(yīng)用著重于多衛(wèi)星系統(tǒng)、遠(yuǎn)距離監(jiān)控以及多功能顯示等方面。使用多衛(wèi)星系統(tǒng)(如GNSS綜合導(dǎo)航定位系統(tǒng))進(jìn)行導(dǎo)航定位時(shí),衛(wèi)星較多可保證實(shí)時(shí)定位的精度與可靠性。
此外,GPS定位還受GPS網(wǎng)的限制,應(yīng)用GPS衛(wèi)星定位技術(shù)建立的控制網(wǎng)叫GPS網(wǎng)。歸納起來(lái)大致可分為兩大類:一類是全球或全國(guó)性的高精度GPS網(wǎng),這類GPS網(wǎng)中相鄰點(diǎn)的距離在數(shù)千公里至上萬(wàn)公里, 其主要任務(wù)是作為全球高精度坐標(biāo)框架或全國(guó)高精度坐標(biāo)框架,以為全球性地球動(dòng)力學(xué)和空間科學(xué)方面的科學(xué)研究工作服務(wù)。另一類是區(qū)域性的 GPS網(wǎng),包括城市或礦區(qū)GPS網(wǎng),GPS工程網(wǎng)等,這類網(wǎng)中的相鄰點(diǎn)間的距離為幾公里至幾十公里,其主要任務(wù)是直接為國(guó)民經(jīng)濟(jì)建設(shè)服務(wù)。
責(zé)任編輯:gt









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論