針對激光傳感器在室外環(huán)境中檢測動態(tài)障礙物所遇到的數(shù)據(jù)處理存在延時、檢測結(jié)果準(zhǔn)確率不高等問題,提出了一種基于3維激光傳感器Velodyne和四線激光傳感器Ibeo信息融合的動態(tài)障礙物檢測及表示方法
2016-11-20 11:26:11 1520
1520 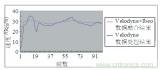
##物聯(lián)網(wǎng)識別技術(shù)期末復(fù)習(xí)概要物聯(lián)網(wǎng)識別技術(shù)第一章物聯(lián)網(wǎng)的體系結(jié)構(gòu):感知層:物聯(lián)網(wǎng)的皮膚和五官,主要任務(wù)是識別物體,采集信息網(wǎng)絡(luò)層:物聯(lián)網(wǎng)的精神中樞和大腦,負(fù)責(zé)信息傳遞和處理應(yīng)用層:物聯(lián)網(wǎng)的社會分工
2021-07-22 08:06:27
我們現(xiàn)在要做一個在高壓線上行走除冰的機構(gòu),需要檢測電線上的障礙并越障。檢測其中一種障礙時遇到了困難,求各位前輩們指點,感激不盡!!!這種障礙物是防震錘,我上傳了實物圖和尺寸圖。圖中D=h=20mm
2014-04-02 19:03:10
ANYmal機器人的實驗版本具有腿和腳,蘇黎世聯(lián)邦理工學(xué)院步行,有腿的機器人可能擅長于越過障礙物,但車輪在光滑地面上行駛?cè)匀桓行省_@就是蘇黎世聯(lián)邦理工學(xué)院的工程師向其現(xiàn)有的ANYmal四足機器人
2021-08-30 08:02:03
只能近距離測一次,測遠(yuǎn)距離的就亂了,然后只能復(fù)位才可以重新開始測量;有障礙時都是可以的,距離也挺準(zhǔn)的。但是沒有障礙物的時候,Echo開始上升沿后,就不會被拉低了。這樣就進入不了下一次的測距了。有想過
2016-01-09 02:40:14
我使用的是 VL53L1X,當(dāng) 0 到 4 米范圍內(nèi)有障礙物時代碼工作正常,如果 4 米以上的傳感器沒有障礙物給出隨機值,我們?nèi)绾谓鉀Q這個問題?
2022-12-08 08:52:03
本帖最后由 hmlbfd 于 2013-5-19 14:41 編輯
范例中的?Inverse Kinematics for Puma 560.vi 如何添加一個球型障礙物(即輸入一個障礙物中心坐標(biāo)和半徑)使之實現(xiàn)避障功能 RMB答謝 可走淘寶 聯(lián)系馬化騰270849756 上程序框圖
2013-05-18 15:08:17
暑假和同學(xué)做的一個避障小車,當(dāng)小車遇到障礙物時舵機先轉(zhuǎn)到0度角,然后轉(zhuǎn)到180度角分別測量是否有障礙物,從而小車做出走向判斷
2015-08-06 10:49:26
我想做一個卷閘門下行過程中的障礙物探測器,就是在下行的過程中如果探測到門下面有障礙物的存在則停止下行,現(xiàn)在沒有思路。各位大俠給個思路,怎么樣來實現(xiàn)、需要具體哪些設(shè)備來完成這個功能。
2013-08-24 09:51:02
我想做一個卷閘門下行過程中的障礙物探測器,就是在下行的過程中如果探測到門下面有障礙物的存在則停止下行,現(xiàn)在沒有思路。各位大俠給個思路,怎么樣來實現(xiàn)、需要具體哪些設(shè)備來完成這個功能。
2013-08-24 09:55:41
本帖最后由 zeng10119 于 2017-3-21 12:01 編輯
有懂避障這方面的嗎?繞過障礙物的程序思路怎么寫?找了好多自動壁障車資料,都是無腦避障,要么是遇到障礙物左轉(zhuǎn)或右轉(zhuǎn),要么是遇到障礙物180°轉(zhuǎn)彎。算法思路怎么搞?
2017-03-21 10:57:54
代碼的話如下所示,寫有沒有障礙物直走的功能,但是實際上沒有實現(xiàn),求大神解決下新手的問題void avoidrun(void){ SR_2 = AVOID_RIGHT_IO; SL_2
2018-12-23 14:23:04
需求分析:1.由小鍵盤上下左右四個按鍵控制人物移動2.空格鍵控制人物放置***3.由系統(tǒng)在無障礙區(qū)域隨機產(chǎn)生BUFF,增加游戲趣味性規(guī)則介紹:1.地圖中的障礙物限制人物移動2.***炸到障礙物后,可
2019-11-27 15:16:41
通過攝像頭對周圍環(huán)境信息的實時采集,如果當(dāng)鏡頭前方出現(xiàn)障礙物時候,以一定的方式(聲音或振動之類的)反饋出來。主要考慮的是實現(xiàn)盲人室內(nèi)導(dǎo)盲作用,不需要太過于考慮實際使用,只要能實現(xiàn)判定到障礙物,自動提醒就行啦。怎么判定前方出現(xiàn)障礙物,一直困擾著我。求大神指個思路,能有程序框圖就更好了
2017-03-14 07:58:55
我想要做一個道路障礙物檢測系統(tǒng)。就是在路面上安一個檢測器,一旦有障礙物擋住,且在路上停留一段時間,就發(fā)射信號報警,使二極管發(fā)光。現(xiàn)在我想請教一下是不是檢測用紅外線好一點,延時用單片機程序大概要怎么寫?電路什么的怎么連啊?求大神解答
2015-03-10 13:33:26
本設(shè)計研究為盲人提供行走時,遇到前方障礙物提前躲避的智能避障預(yù)警系統(tǒng)。以AT89S52單片機作為核心處理器,采用超聲波回波時間差測量人與物體之間的安全距離,實現(xiàn)了提前預(yù)警使用者避讓障礙物,起到避免
2021-11-19 08:34:37
需要測量田塊的形狀與大小,及判別田間障礙物的位置 怎么才能實現(xiàn)呢
2022-06-02 11:12:41
的問題是,不能按照我的指令完成避障。數(shù)碼管和按鍵和pwm功能基本都實現(xiàn)了,但是遇到障礙物時,小車倒退一小會接著就不走了,希望大神點撥一下,謝謝了。下面是主程序和pwm的程序。#include //包含
2020-04-19 22:50:58
目前,在全球范圍內(nèi),超過2.5億人視力受損。對于視力受損的群體來說,獨立外出是一項巨大挑戰(zhàn)。不僅需要識別障礙物,避開障礙物,還需要根據(jù)障礙物的位置信息做出自主尋路和導(dǎo)航判斷。當(dāng)說到盲人導(dǎo)航的時候
2021-11-12 14:12:43
本設(shè)計采用AT89C52為主要控制芯片的智能車,HC-SR04為超聲波測距傳感器。該汽車避障系統(tǒng)擁有自動聲光報警、超聲波測距,自動避開障礙物等功能。當(dāng)汽車與障礙物之間的距離小于安全距離35cm
2022-01-05 08:30:17
我正在設(shè)計一個也能避開各種障礙物(兩個數(shù)字紅外 (IR) 傳感器)的巡線機器人,但由于我是電子學(xué)初學(xué)者,所以我對我的原理圖有點困惑,這就是為什么我想知道是否我的原理圖是正確的,如果它能工作的話
2022-12-07 07:49:08
請問隔著一個很大的障礙物,怎么才能探測到障礙物后面的汽車呢(汽車沒有安裝特殊的設(shè)備,就一普通汽車)?
2013-11-22 15:12:08
接近傳感器及現(xiàn)有方案接近感應(yīng)傳感器在我們的生活中發(fā)揮著重要的作用,在智能家居家電中廣泛存在,如自動感應(yīng)出水的水龍頭,自動感應(yīng)送風(fēng)的空調(diào),自動檢測并避開障礙物的掃地機及自動打開與關(guān)閉的走廊燈等等。接近
2022-11-10 07:51:16
百度網(wǎng)上和查閱教材了半天,只得到不外乎反復(fù)互相拷貝引用的兩種說法:1、“對于所設(shè)計的每一個電源層,一系列障礙物線將自動的創(chuàng)建在板框周圍,這些線在屏幕上不可編輯,建立的障礙物線是原來設(shè)置寬度的兩倍
2017-11-04 11:27:16
小弟想做一個小車,51控制,檢測模塊采用光電開關(guān)和紅外對管(有障礙物都是低電平,無障礙物高電平),但是我如何控制它們的邏輯關(guān)系,需要什么模塊嗎,求大俠講解
2019-01-30 02:13:05
小弟想做一個小車,51控制,檢測模塊采用光電開關(guān)和紅外對管(有障礙物都是低電平,無障礙物高電平),但是我如何控制它們的邏輯關(guān)系,需要什么模塊嗎,求大俠講解
2012-08-25 08:53:52
檢測障礙物有什么什么傳感器,用紅外反射還是超聲波測距,或者還有其他傳感器?
2023-11-08 06:33:49
電路設(shè)計要求:在一個數(shù)量為8*9的方格上安裝LED燈(LED為5w,共安裝72個),要求每個燈感應(yīng)到障礙物可以常亮,障礙物移走則熄滅。(障礙物距離燈20-300mm)方格四個角同時遇到障礙物時電路通電,移走障礙物電路斷電。
2020-03-06 11:24:08
本帖最后由 gk320830 于 2015-3-8 14:20 編輯
急需用到2米內(nèi)障礙物感應(yīng)器,帶開關(guān)功能或者高手幫忙設(shè)計個輔助開關(guān)電路,24V電源供電,多謝
2013-03-07 21:58:40
本畢業(yè)設(shè)計要求設(shè)計一個汽車防撞測距報警器, 能檢測出汽車前后左右四個方向的障礙物并發(fā)出報警信號。要求能檢測出前方障礙物的距離,并用數(shù)字顯示給駕駛員,在危險距離時要發(fā)出急促的報警聲。該裝置由檢測電路
2013-07-21 21:58:27
、跟蹤,攝像頭也可以做物體的分類和跟蹤。毫米波雷達(dá)主要用于對物體障礙物識別。毫米波雷達(dá)、攝像頭和激光雷達(dá)這三個傳感器,有一些重合點。這是由傳感器本身的性質(zhì)決定,他們有各自不可或缺的功能。毫米波雷達(dá)主要
2017-09-08 17:24:48
用labview設(shè)計超級馬里奧游戲時如何加障礙物
2017-05-09 13:33:15
我現(xiàn)在需要使用紅外檢測一個比較小的障礙物,直徑兩厘米,黑色,金屬。很多紅外檢測模塊的賣家都不確定可以檢測的到,我現(xiàn)在有一個想法,不知道可不可行。我想檢測不到應(yīng)該是因為這個障礙物對紅外的反射比較
2014-04-03 11:28:56
一般的紅外只能在沒有障礙物的情況下成像,有沒有可以穿障礙物的紅外成像技術(shù),我們想用在消防救援上面。
2020-08-11 11:18:09
這種紅外線障礙物探測器不僅能用于機器人行進跟蹤控制,而且還可作為家庭和商店自動控制系統(tǒng)的重要部分。電路核心部分采用一只紅外線發(fā)射LED(IR1)和一只紅外線接收二極管(IR2)。
2021-04-28 07:03:20
展示在市區(qū)的自動駕駛情境。這臺由光達(dá)、定位系統(tǒng)和攝影機組成的自動駕駛車,在車輛偏離車道時可自動導(dǎo)回車道。三種系統(tǒng)的作用優(yōu)先級,第一是光達(dá),不僅可以偵測障礙物,還可以“識別”。例如,當(dāng)識別出前方障礙物為
2017-05-15 17:49:20
想用單片機直接通過串口連接激光雷達(dá),測障礙物,該激光雷達(dá)波特率230400,是arduino的極限115200的兩倍,所以要用STM32的芯片了。其數(shù)據(jù)手冊說的還是不清楚,固連接電腦的串口根據(jù)測得
2022-02-24 06:31:00
本帖最后由 gk320830 于 2015-3-8 20:36 編輯
設(shè)計完P(guān)CB后走線不能躲避障礙物時什么情況?已經(jīng)設(shè)置了躲避障礙物還是不能躲避
2012-12-20 08:47:57
Infrared Proximity Sensor如何檢測前方是否有障礙物
2020-11-06 07:57:22
本帖最后由 7681196 于 2016-4-24 14:17 編輯
最近參加學(xué)校一個比賽,就是用51單片機實現(xiàn)飛機避開障礙物的游戲,游戲規(guī)則就是飛機通過移動來避開障礙物,碰到則游戲結(jié)束,有
2016-04-24 13:52:52
基于超聲波避障技術(shù)是建立在獲取機器人前方障礙物的距離和位置信息上,故超聲波避障技術(shù)主要運用超聲波傳感器,根據(jù)超聲波測距原理,結(jié)合矩陣式結(jié)構(gòu)設(shè)計理念的數(shù)據(jù)融合對機器人前方障礙物的距離和位置進行定位。
2020-05-11 07:23:15
本帖最后由 化雨眠66 于 2013-4-3 12:48 編輯
[table=98%][tr][td]題目:越障竟速小車場地:草地、距離30m,寬度1m,直線場地障礙物:木棍、小石塊、小土塊,障礙物高度
2013-04-03 12:43:46
遇障礙物時語音提示前方危險,請注意。語音模塊是isd1820單片機51 求幫忙
2017-02-24 21:43:00
為什么有些東西,遇到障礙物會自動返回,是哪一種傳感器嗎?哪里有沒有這類的電路圖介紹下,非常感謝
2011-09-10 21:14:25
匯編語言程序設(shè)計案例1—動態(tài)顯示/障礙物檢測/障礙物方位檢測
10-1. LED數(shù)碼管顯示原理10-2. 案例分析1(2位學(xué)號顯示)10-3. 案例分析2(簡易按鍵搶答)10-4.
2009-03-23 12:15:35 38
38 一種基于圖像分割和立體視覺相結(jié)合的障礙物檢測方法。通過分割提取出了障礙物的大致形體并濾去地面上的冗余信息,這樣就把立體視覺避障中匹配區(qū)域縮小到有用的障礙物區(qū)
2010-10-18 16:08:0827 障礙物檢測實驗
一、實驗?zāi)康摹靶L(fēng)”小車在運動過程中要成功避開障礙物必須在一定距離外就探測到障礙物。在小車上探測障礙物
2009-03-23 10:47:292348 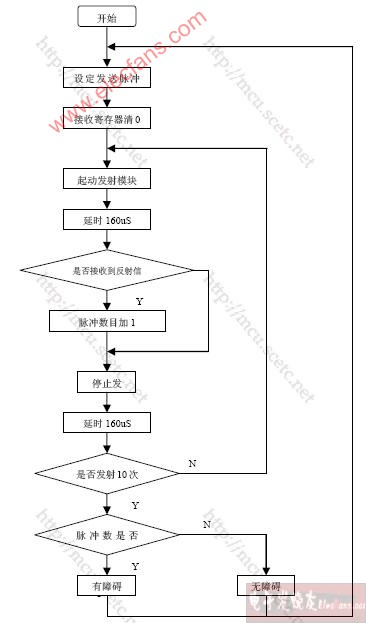
障礙物方位檢測實驗
一、實驗?zāi)康男≤囋谶\動中要成功避開障礙物,除了要檢測是否有障礙物外,還需要判斷障礙物的方位,以便小
2009-03-23 10:48:531843 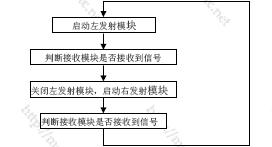
用單片機控制紅外編碼探測障礙物
介紹使用基于單片機控制紅外編碼探測障礙的方案及實現(xiàn)的方法,以解決使用紅外線自動感知障礙設(shè)備時出現(xiàn)的接收設(shè)
2009-03-29 15:13:351779 
論文以基于機器視覺的道路識別與障礙物檢測為研究對象采用動態(tài)圖像處理技術(shù)為行駛車輛提供環(huán)境狀態(tài)信息及車輛行駛狀態(tài)信息綜合利用車輛的當(dāng)前行駛車道狀態(tài)(彎道或者直道)和距離
2012-04-25 14:58:5580 移動機器人的障礙物群檢測方法!資料來源網(wǎng)絡(luò),如有侵權(quán),敬請原諒!
2015-12-25 09:49:4217 近段時間集中曝光的多起車禍讓特斯拉的無人駕駛模式在安全性方面?zhèn)涫苜|(zhì)疑。現(xiàn)在,國內(nèi)車主也被坑了。
2016-08-08 10:37:381205 一個黑客團隊采用多種方式,成功愚弄了特斯拉無人駕駛儀,讓它以為前方的障礙物并不存在。試想一下,如果這個障礙物是行人,或者是一輛高速行駛的大型車,結(jié)果會是怎樣?
2016-08-08 10:52:471005 海底復(fù)雜環(huán)境下機器人擺脫障礙物路徑優(yōu)化方法研究_翟雁
2017-01-03 18:00:370 據(jù)外媒報道,大眾引入了新款熱成像攝像頭,可探查車輛前方的行人及障礙物,其測距為426英尺。該系統(tǒng)結(jié)合了智能座艙技術(shù),可在儀表組內(nèi)顯示前方圖像。
2018-05-10 10:37:003104 24 GHz雷達(dá)通過障礙物探測和測距提供安全性。
2018-06-04 03:47:003910 這種紅外線障礙物探測器不僅能用于機器人行進跟蹤控制,而且還可作為家庭和商店自動控制系統(tǒng)的重要部分。
2019-01-29 15:49:005718 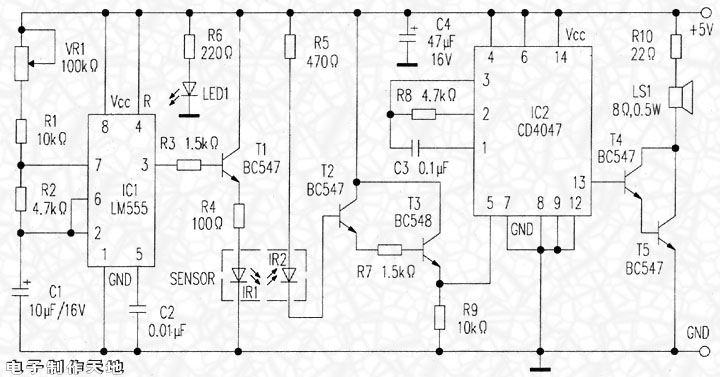
在得到初始視差圖后,需要進一步判別障礙物的遠(yuǎn)近及大小,所以這里引入 V-視差和 U-視差理論 [7] 。 V-視差圖是在初始視差圖的基礎(chǔ)上,累加視差圖像每一行上具有相同視差值 dv 的像素個數(shù)
2018-11-29 16:27:4811512 
這個階段主要作用是障礙物集群做XY平面下的凸包多邊形計算,最終得到這個多邊形的一些角點。第一部分相對比較簡單,沒什么難點,計算凸包是調(diào)用plc庫的ConvexHull組件(具體請參考pcl::ConvexHull)。
2018-12-06 16:23:305063 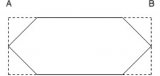
為了實現(xiàn)非結(jié)構(gòu)化道路檢測與障礙物的識別,提出了一種基于最小錯誤率貝葉斯決策與 Hough變換相結(jié)合的非結(jié)構(gòu)化道路檢測與障礙物識別算法。算法首先將Otsu多閾值理論引入到最小錯誤率貝葉斯決策中并進
2020-07-06 17:45:587 近期,香港市場研究機構(gòu)MobiusTrend發(fā)布了一份有關(guān)“特斯拉的AR云平臺和WIMI的無人駕駛?cè)⑷I視覺SDK”的研究報告。報告顯示,無人駕駛汽車可以實現(xiàn)自主控制并主動避開障礙物。盡管這聽起來令人難以置信,但這項技術(shù)現(xiàn)已取得了重大突破。
2020-09-08 15:07:01826 以色列初創(chuàng)公司Corsight AI已推出了一種面部識別解決方案,該解決方案能夠快速,準(zhǔn)確地識別人員,繞過障礙物以清除面部表情(例如面部遮蓋物和惡劣天氣)。
2020-11-21 09:33:101473 蘋果公司一直在為其可能推出的蘋果汽車研發(fā)各種技術(shù),例如,激光雷達(dá)障礙物探測系統(tǒng)以及觸控式儀表盤。據(jù)外媒報道,當(dāng)?shù)貢r間12月8日,美國專利商標(biāo)局授予了蘋果公司一項專利,名為“障礙物
2020-12-10 16:09:041811 12 月 19 日凌晨消息,特斯拉在柏林超級工廠加緊建設(shè)的過程中又遇到了另一個障礙。
2020-12-19 09:23:301422 避免障礙物(即墻壁或前方的物體)的Arduino控制汽車。 ? ? ? ? 責(zé)任編輯:xj 原文標(biāo)題:基于Arduino的避障車 文章出處:【微信公眾號:電路設(shè)計技能】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。 ?
2020-12-25 14:55:461423 基于fpga的3D打印清潔機器人。該機器人具有多個用于檢測障礙物的傳感器和一個用于清潔地板的吸塵器。此外,該機器人還包含一種導(dǎo)航算法,使其能夠盡可能高效地駛離房間并相應(yīng)地對障礙物做出反應(yīng)。
2021-04-28 15:09:291918 
攝像頭獲取的圖像包括行人、其他車輛、動物或障礙物,這不僅對特斯拉車輛駕駛員的安全很重要,對其他人也很重要。
2021-06-26 14:04:478874 
ESP8266 SOC智能硬件典型應(yīng)用方案-紅外障礙物檢測應(yīng)用-布爾值上報
2022-10-08 10:11:160 電子發(fā)燒友網(wǎng)站提供《Arduino障礙物避免機器人汽車.zip》資料免費下載
2022-10-31 09:30:560 電子發(fā)燒友網(wǎng)站提供《使用IR模塊的障礙物檢測器.zip》資料免費下載
2022-11-14 11:31:220 電子發(fā)燒友網(wǎng)站提供《Robobug六足動物行走和跟隨障礙物開源硬件.zip》資料免費下載
2022-12-06 14:36:200 電子發(fā)燒友網(wǎng)站提供《障礙物檢測和顏色跟隨機器人的創(chuàng)建.zip》資料免費下載
2022-12-23 15:22:200 電子發(fā)燒友網(wǎng)站提供《創(chuàng)建一個能夠警告接近障礙物的系統(tǒng).zip》資料免費下載
2022-12-29 11:28:150 降雨并短時強降雨,列車高速運行中撞上突發(fā)溜坍侵入線路的泥石流,導(dǎo)致7號、8號車發(fā)生脫軌。障礙物侵限造成的事故,貴州并非第一例。據(jù)界面新聞報道,2020年3月,受連日
2022-08-04 09:33:04880 
電子發(fā)燒友網(wǎng)站提供《如何讓Arduino使用雷達(dá)避開障礙物.zip》資料免費下載
2023-06-26 14:58:361 基于點云的3D障礙物檢測 主要有以下步驟: 點云數(shù)據(jù)的處理 基于點云的障礙物分割 障礙物邊框構(gòu)建 點云到圖像平面的投影 點云數(shù)據(jù)的處理 KITTI數(shù)據(jù)集 KITTI數(shù)據(jù)集有四個相機,主要使用第三個
2023-06-26 10:22:38496 
編輯注:NVIDIA 自動駕駛實驗室系列視頻,將以工程技術(shù)為重點的視角關(guān)注實現(xiàn)自動駕駛汽車的各個挑戰(zhàn)以及 NVIDIA DRIVE AV 軟件團隊如何應(yīng)對這些問題。 自動泊車輔助系統(tǒng)在感知障礙物
2023-07-13 21:15:01426 
今天給大家分享的是:簡單的障礙物識別傳感器電路。附加元器件清單+原理圖 一、簡單的障礙物識別傳感器電路 該電路是基于 IR LED 、 光電二極管 和 運算放大器LM358P 設(shè)計的 簡單障礙物識別
2023-09-06 19:40:01382 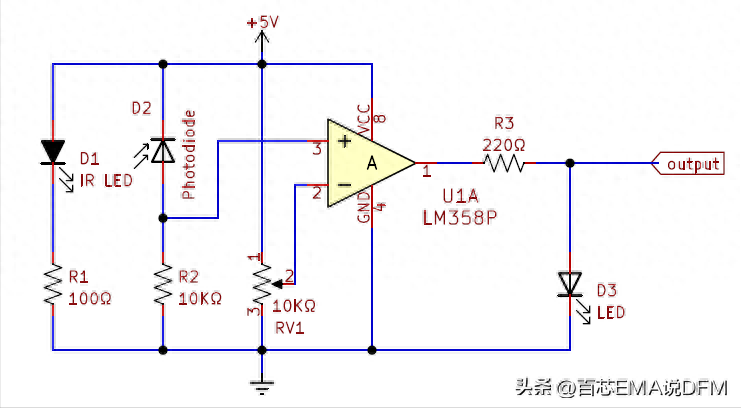
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論