 電子發(fā)燒友App
電子發(fā)燒友App


無人駕駛汽車的功能
不需要人駕駛汽車,它是一種智能汽車。他也可以成為一個(gè)機(jī)器人它里邊兒你考計(jì)算機(jī)系統(tǒng)。那是下不需要人就可以讓汽車自動(dòng)行駛的功能。這項(xiàng)技術(shù)發(fā)展是非常快的。有一些報(bào)道指出,在2010年到2015年之間。這種汽車的相關(guān)技術(shù)發(fā)明的專利就達(dá)到了22000件。
并且在這個(gè)過程,有一些企業(yè),它積累了大量的技術(shù)成為了行業(yè)的領(lǐng)導(dǎo)者比如說,谷歌,百度等。互聯(lián)網(wǎng)公司和標(biāo)一些企業(yè)他也在這個(gè)過程中被淘汰了,比如說樂視網(wǎng)。這種汽車的概念出現(xiàn),也是最近才出現(xiàn)的,他最早出現(xiàn)在。美國(guó),英國(guó),德國(guó)等一些發(fā)達(dá)國(guó)家。不過這些國(guó)家在這種技術(shù)的研發(fā)階段都取得了巨大的成果。并且在理論階段到研究階段,再到是十月十的也就接的。再到可是型和實(shí)用化等等,一個(gè)階段,這些國(guó)家都取得了突破性的進(jìn)展。
而中國(guó)這項(xiàng)技術(shù)齊步比較晚,大概。歐美等發(fā)達(dá)國(guó)家到底這些發(fā)達(dá)國(guó)家玩十年左右。哦!你有時(shí)間,有報(bào)道指出,到現(xiàn)在為止世界上最先進(jìn)的這種汽車已經(jīng)在路上測(cè)試了15萬(wàn)公里,其中的最后幾萬(wàn)公里是在沒有任何人的安全干預(yù)下完全有這輛汽計(jì)算機(jī)系統(tǒng)來控制汽車完成的。這種高科技汽車,它也集成了很多的技術(shù)是很多技術(shù)結(jié)合鐵。其中有制度控制體系結(jié)構(gòu),人工智能和視覺設(shè)計(jì)等等。
這種高科技汽車給人們帶來什么便利呢?那就是比如說,停車等功能有些新手開車的人壞嗎?倒車就說可能不好,在比較狹窄的停車位中,他們可能就到不進(jìn)去。但是如果用這項(xiàng)技術(shù)的話,你把車停到合適的位置,汽車,它自動(dòng)的就可以。感覺周圍的環(huán)境,并幫助你完成停車這件事情。
百度無人駕駛汽車的主要功能
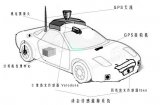
百度無人駕駛汽車是一種無需司機(jī)手動(dòng)操作,汽車即可自動(dòng)行駛前往目的地,綜合使用攝像機(jī)、雷達(dá)系統(tǒng)、傳感器和GPS系統(tǒng)來檢測(cè)周圍環(huán)境,在大量數(shù)據(jù)基礎(chǔ)上進(jìn)行實(shí)時(shí)定位分析,從而判斷行駛方向和速度。百度無人駕駛車往返全程均實(shí)現(xiàn)自動(dòng)駕駛,并實(shí)現(xiàn)了多次跟車減速、變道、超車、上下匝道、調(diào)頭等復(fù)雜駕駛動(dòng)作。測(cè)試時(shí)最高速度達(dá)到120公里/小時(shí)。中國(guó)面臨的交通擁堵、汽車安全、環(huán)保等問題逐步凸顯,百度無人車對(duì)于改善交通,減少人為事故的意義重大。
百度無人駕駛汽車可自動(dòng)識(shí)別交通指示牌和行車信息,具備雷達(dá)、相機(jī)、全球衛(wèi)星導(dǎo)航等電子設(shè)施,并安裝同步傳感器。車主只要向?qū)Ш较到y(tǒng)輸入目的地,汽車即可自動(dòng)行駛,前往目的地。在行駛過程中,汽車會(huì)通過傳感設(shè)備上傳路況信息,在大量數(shù)據(jù)基礎(chǔ)上進(jìn)行實(shí)時(shí)定位分析,從而判斷行駛方向和速度。
無人駕駛汽車構(gòu)造
無人駕駛系統(tǒng)的核心可以概述為三個(gè)部分:感知(Perception),規(guī)劃(Planning)和控制(Control),這些部分的交互以及其與車輛硬件、其他車輛的交互可以用下圖表示:
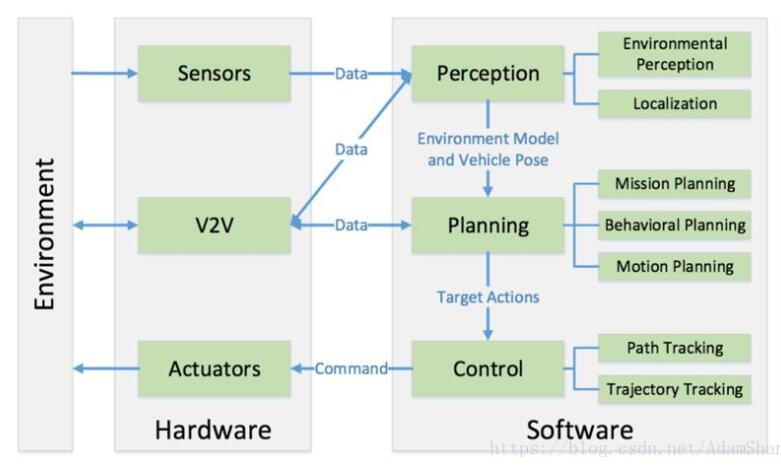
感知是指無人駕駛系統(tǒng)從環(huán)境中收集信息并從中提取相關(guān)知識(shí)的能力。其中,環(huán)境感知(Environmental Perception)特指對(duì)于環(huán)境的場(chǎng)景理解能力,例如障礙物的位置,道路標(biāo)志/標(biāo)記的檢測(cè),行人車輛的檢測(cè)等數(shù)據(jù)的語(yǔ)義分類。一般來說,定位(Localization)也是感知的一部分,定位是無人車確定其相對(duì)于環(huán)境的位置的能力。
規(guī)劃是無人車為了某一目標(biāo)而作出一些有目的性的決策的過程,對(duì)于無人駕駛車輛而言,這個(gè)目標(biāo)通常是指從出發(fā)地到達(dá)目的地,同時(shí)避免障礙物,并且不斷優(yōu)化駕駛軌跡和行為以保證乘客的安全舒適。規(guī)劃層通常又被細(xì)分為任務(wù)規(guī)劃(Mission Planning),行為規(guī)劃(Behavioral Planning)和動(dòng)作規(guī)劃(Motion Planning)三層。
最后,控制則是無人車精準(zhǔn)地執(zhí)行規(guī)劃好的動(dòng)作的能力,這些動(dòng)作來源于更高的層。
1.感知
環(huán)境感知
為了確保無人車對(duì)環(huán)境的理解和把握,無人駕駛系統(tǒng)的環(huán)境感知部分通常需要獲取周圍環(huán)境的大量信息,具體來說包括:障礙物的位置,速度以及可能的行為,可行駛的區(qū)域,交通規(guī)則等等。無人車通常是通過融合激光雷達(dá)(Lidar),相機(jī)(Camera),毫米波雷達(dá)(Millimeter Wave Radar)等多種傳感器的數(shù)據(jù)來獲取這些信息,本節(jié)我們簡(jiǎn)要地了解一下激光雷達(dá)和相機(jī)在無人車感知中的應(yīng)用。
激光雷達(dá)是一類使用激光進(jìn)行探測(cè)和測(cè)距的設(shè)備,它能夠每秒鐘向環(huán)境發(fā)送數(shù)百萬(wàn)光脈沖,它的內(nèi)部是一種旋轉(zhuǎn)的結(jié)構(gòu),這使得激光雷達(dá)能夠?qū)崟r(shí)的建立起周圍環(huán)境的3維地圖。
通常來說,激光雷達(dá)以10Hz左右的速度對(duì)周圍環(huán)境進(jìn)行旋轉(zhuǎn)掃描,其掃描一次的結(jié)果為密集的點(diǎn)構(gòu)成的3維圖,每個(gè)點(diǎn)具備(x,y,z)信息,這個(gè)圖被稱為點(diǎn)云圖(Point Cloud Graph),如下圖所示,是使用Velodyne VLP-32c激光雷達(dá)建立的一個(gè)點(diǎn)云地圖:
激光雷達(dá)因其可靠性目前仍是無人駕駛系統(tǒng)中最重要的傳感器,然而,在現(xiàn)實(shí)使用中,激光雷達(dá)并不是完美的,往往存在點(diǎn)云過于稀疏,甚至丟失部分點(diǎn)的問題,對(duì)于不規(guī)則的物體表面,使用激光雷達(dá)很難辨別其模式,在諸如大雨天氣這類情況下,激光雷達(dá)也無法使用。
為了理解點(diǎn)云信息,通常來說,我們對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行兩步操作:分割(Segmentation)和分類(Classification)。其中,分割是為了將點(diǎn)云圖中離散的點(diǎn)聚類成若干個(gè)整體,而分類則是區(qū)分出這些整體屬于哪一個(gè)類別(比如說行人,車輛以及障礙物)。分割算法可以被分類如下幾類:
基于邊的方法,例如梯度過濾等;
基于區(qū)域的方法,這類方法使用區(qū)域特征對(duì)鄰近點(diǎn)進(jìn)行聚類,聚類的依據(jù)是使用一些指定的標(biāo)準(zhǔn)(如歐幾里得距離,表面法線等),這類方法通常是先在點(diǎn)云中選取若干種子點(diǎn)(seed points),然后使用指定的標(biāo)準(zhǔn)從這些種子點(diǎn)出發(fā)對(duì)鄰近點(diǎn)進(jìn)行聚類;
參數(shù)方法,這類方法使用預(yù)先定義的模型去擬合點(diǎn)云,常見的方法包括隨機(jī)樣本一致性方法(Random Sample Consensus,RANSAC )和霍夫變換(Hough Transform,HT);
基于屬性的方法,首先計(jì)算每個(gè)點(diǎn)的屬性,然后對(duì)屬性相關(guān)聯(lián)的點(diǎn)進(jìn)行聚類的方法;
基于圖的方法;
基于機(jī)器學(xué)習(xí)的方法;
在完成了點(diǎn)云的目標(biāo)分割以后,分割出來的目標(biāo)需要被正確的分類,在這個(gè)環(huán)節(jié),一般使用機(jī)器學(xué)習(xí)中的分類算法,如支持向量機(jī)(Support Vector Machine,SVM)對(duì)聚類的特征進(jìn)行分類,最近幾年由于深度學(xué)習(xí)的發(fā)展,業(yè)界開始使用特別設(shè)計(jì)的卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network,CNN)對(duì)三維的點(diǎn)云聚類進(jìn)行分類。
然而,不論是提取特征-SVM的方法還是原始點(diǎn)云-CNN的方法,由于激光雷達(dá)點(diǎn)云本身解析度低的原因,對(duì)于反射點(diǎn)稀疏的目標(biāo)(比如說行人),基于點(diǎn)云的分類并不可靠,所以在實(shí)踐中,我們往往融合激光雷達(dá)和相機(jī)傳感器,利用相機(jī)的高分辨率來對(duì)目標(biāo)進(jìn)行分類,利用Lidar的可靠性對(duì)障礙物檢測(cè)和測(cè)距,融合兩者的優(yōu)點(diǎn)完成環(huán)境感知。
在無人駕駛系統(tǒng)中,我們通常使用圖像視覺來完成道路的檢測(cè)和道路上目標(biāo)的檢測(cè)。道路的檢測(cè)包含對(duì)道路線的檢測(cè)(Lane Detection),可行駛區(qū)域的檢測(cè)(Drivable Area Detection);道路上路標(biāo)的檢測(cè)包含對(duì)其他車輛的檢測(cè)(Vehicle Detection),行人檢測(cè)(Pedestrian Detection),交通標(biāo)志和信號(hào)的檢測(cè)(Traffic Sign Detection)等所有交通參與者的檢測(cè)和分類。
車道線的檢測(cè)涉及兩個(gè)方面:第一是識(shí)別出車道線,對(duì)于彎曲的車道線,能夠計(jì)算出其曲率,第二是確定車輛自身相對(duì)于車道線的偏移(即無人車自身在車道線的哪個(gè)位置)。一種方法是抽取一些車道的特征,包括邊緣特征(通常是求梯度,如索貝爾算子),車道線的顏色特征等,使用多項(xiàng)式擬合我們認(rèn)為可能是車道線的像素,然后基于多項(xiàng)式以及當(dāng)前相機(jī)在車上掛載的位置確定前方車道線的曲率和車輛相對(duì)于車道的偏離。
可行駛區(qū)域的檢測(cè)目前的一種做法是采用深度神經(jīng)網(wǎng)絡(luò)直接對(duì)場(chǎng)景進(jìn)行分割,即通過訓(xùn)練一個(gè)逐像素分類的深度神經(jīng)網(wǎng)絡(luò),完成對(duì)圖像中可行駛區(qū)域的切割。
交通參與者的檢測(cè)和分類目前主要依賴于深度學(xué)習(xí)模型,常用的模型包括兩類:
以RCNN為代表的基于Region Proposal的深度學(xué)習(xí)目標(biāo)檢測(cè)算法(RCNN,SPP-NET,F(xiàn)ast-RCNN,F(xiàn)aster-RCNN等);
以YOLO為代表的基于回歸方法的深度學(xué)習(xí)目標(biāo)檢測(cè)算法(YOLO,SSD等)
2.定位
在無人車感知層面,定位的重要性不言而喻,無人車需要知道自己相對(duì)于環(huán)境的一個(gè)確切位置,這里的定位不能存在超過10cm的誤差,試想一下,如果我們的無人車定位誤差在30厘米,那么這將是一輛非常危險(xiǎn)的無人車(無論是對(duì)行人還是乘客而言),因?yàn)闊o人駕駛的規(guī)劃和執(zhí)行層并不知道它存在30厘米的誤差,它們?nèi)匀话凑斩ㄎ痪珳?zhǔn)的前提來做出決策和控制,那么對(duì)某些情況作出的決策就是錯(cuò)的,從而造成事故。由此可見,無人車需要高精度的定位。
目前使用最廣泛的無人車定位方法當(dāng)屬融合全球定位系統(tǒng)(Global Positioning System,GPS)和慣性導(dǎo)航系統(tǒng)(Inertial Navigation System)定位方法,其中,GPS的定位精度在數(shù)十米到厘米級(jí)別之間,高精度的GPS傳感器價(jià)格也就相對(duì)昂貴。融合GPS/IMU的定位方法在GPS信號(hào)缺失,微弱的情況下無法做到高精度定位,如地下停車場(chǎng),周圍均為高樓的市區(qū)等,因此只能適用于部分場(chǎng)景的無人駕駛?cè)蝿?wù)。
地圖輔助類定位算法是另一類廣泛使用的無人車定位算法,同步定位與地圖構(gòu)建(Simultaneous Localization And Mapping,SLAM)是這類算法的代表,SLAM的目標(biāo)即構(gòu)建地圖的同時(shí)使用該地圖進(jìn)行定位,SLAM通過利用已經(jīng)觀測(cè)到的環(huán)境特征確定當(dāng)前車輛的位置以及當(dāng)前觀測(cè)特征的位置。
這是一個(gè)利用以往的先驗(yàn)和當(dāng)前的觀測(cè)來估計(jì)當(dāng)前位置的過程,實(shí)踐上我們通常使用貝葉斯濾波器(Bayesian filter)來完成,具體來說包括卡爾曼濾波(Kalman Filter),擴(kuò)展卡爾曼濾波(Extended Kalman Filter)以及粒子濾波(Particle Filter)。
SLAM雖然是機(jī)器人定位領(lǐng)域的研究熱點(diǎn),但是在實(shí)際無人車開發(fā)過程中使用SLAM定位卻存在問題,不同于機(jī)器人,無人車的運(yùn)動(dòng)是長(zhǎng)距離的,大開放環(huán)境的。在長(zhǎng)距離的運(yùn)動(dòng)中,隨著距離的增大,SLAM定位的偏差也會(huì)逐漸增大,從而造成定位失敗。
在實(shí)踐中,一種有效的無人車定位方法是改變?cè)瓉鞸LAM中的掃描匹配類算法,具體來說,我們不再在定位的同時(shí)制圖,而是事先使用傳感器如激光雷達(dá)對(duì)區(qū)域構(gòu)建點(diǎn)云地圖,通過程序和人工的處理將一部分“語(yǔ)義”添加到地圖中(例如車道線的具體標(biāo)注,路網(wǎng),紅綠燈的位置,當(dāng)前路段的交通規(guī)則等等),這個(gè)包含了語(yǔ)義的地圖就是我們無人駕駛車的高精度地圖(HD Map)。
在實(shí)際定位的時(shí)候,使用當(dāng)前激光雷達(dá)的掃描和事先構(gòu)建的高精度地圖進(jìn)行點(diǎn)云匹配,確定我們的無人車在地圖中的具體位置,這類方法被統(tǒng)稱為掃描匹配方法(Scan Matching),掃描匹配方法最常見的是迭代最近點(diǎn)法(Iterative Closest Point ,ICP),該方法基于當(dāng)前掃描和目標(biāo)掃描的距離度量來完成點(diǎn)云配準(zhǔn)。
除此以外,正態(tài)分布變換(Normal Distributions Transform,NDT)也是進(jìn)行點(diǎn)云配準(zhǔn)的常用方法,它基于點(diǎn)云特征直方圖來實(shí)現(xiàn)配準(zhǔn)。基于點(diǎn)云配準(zhǔn)的定位方法也能實(shí)現(xiàn)10厘米以內(nèi)的定位精度。
雖然點(diǎn)云配準(zhǔn)能夠給出無人車相對(duì)于地圖的全局定位,但是這類方法過于依賴事先構(gòu)建的高精度地圖,并且在開放的路段下仍然需要配合GPS定位使用,在場(chǎng)景相對(duì)單一的路段(如高速公路),使用GPS加點(diǎn)云匹配的方法相對(duì)來說成本過高。
3.規(guī)劃
任務(wù)規(guī)劃
無人駕駛規(guī)劃系統(tǒng)的分層結(jié)構(gòu)設(shè)計(jì)源于2007年舉辦的DAPRA城市挑戰(zhàn)賽,在比賽中多數(shù)參賽隊(duì)都將無人車的規(guī)劃模塊分為三層設(shè)計(jì):任務(wù)規(guī)劃,行為規(guī)劃和動(dòng)作規(guī)劃,其中,任務(wù)規(guī)劃通常也被稱為路徑規(guī)劃或者路由規(guī)劃(Route Planning),其負(fù)責(zé)相對(duì)頂層的路徑規(guī)劃,例如起點(diǎn)到終點(diǎn)的路徑選擇。
我們可以把我們當(dāng)前的道路系統(tǒng)處理成有向網(wǎng)絡(luò)圖(Directed Graph Network),這個(gè)有向網(wǎng)絡(luò)圖能夠表示道路和道路之間的連接情況,通行規(guī)則,道路的路寬等各種信息,其本質(zhì)上就是我們前面的定位小節(jié)中提到的高精度地圖的“語(yǔ)義”部分,這個(gè)有向網(wǎng)絡(luò)圖被稱為路網(wǎng)圖(Route Network Graph),如下圖所示:
這樣的路網(wǎng)圖中的每一個(gè)有向邊都是帶權(quán)重的,那么,無人車的路徑規(guī)劃問題,就變成了在路網(wǎng)圖中,為了讓車輛達(dá)到某個(gè)目標(biāo)(通常來說是從A地到B地),基于某種方法選取最優(yōu)(即損失最小)的路徑的過程,那么問題就變成了一個(gè)有向圖搜索問題,傳統(tǒng)的算法如迪科斯徹算法(Dijkstra’s Algorithm)和A*算法(A* Algorithm)主要用于計(jì)算離散圖的最優(yōu)路徑搜索,被用于搜索路網(wǎng)圖中損失最小的路徑。
行為規(guī)劃
行為規(guī)劃有時(shí)也被稱為決策制定(Decision Maker),主要的任務(wù)是按照任務(wù)規(guī)劃的目標(biāo)和當(dāng)前的局部情況(其他的車輛和行人的位置和行為,當(dāng)前的交通規(guī)則等),作出下一步無人車應(yīng)該執(zhí)行的決策,可以把這一層理解為車輛的副駕駛,他依據(jù)目標(biāo)和當(dāng)前的交通情況指揮駕駛員是跟車還是超車,是停車等行人通過還是繞過行人等等。
行為規(guī)劃的一種方法是使用包含大量動(dòng)作短語(yǔ)的復(fù)雜有限狀態(tài)機(jī)(Finite State Machine,F(xiàn)SM)來實(shí)現(xiàn),有限狀態(tài)機(jī)從一個(gè)基礎(chǔ)狀態(tài)出發(fā),將根據(jù)不同的駕駛場(chǎng)景跳轉(zhuǎn)到不同的動(dòng)作狀態(tài),將動(dòng)作短語(yǔ)傳遞給下層的動(dòng)作規(guī)劃層,下圖是一個(gè)簡(jiǎn)單的有限狀態(tài)機(jī):
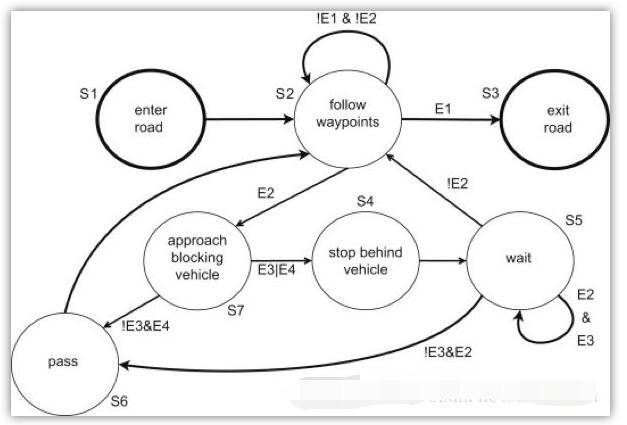
如上圖所示,每個(gè)狀態(tài)都是對(duì)車輛動(dòng)作的決策,狀態(tài)和狀態(tài)之間存在一定的跳轉(zhuǎn)條件,某些狀態(tài)可以自循環(huán)(比如上圖中的循跡狀態(tài)和等待狀態(tài))。雖然是目前無人車上采用的主流行為決策方法,有限狀態(tài)機(jī)仍然存在著很大的局限性:首先,要實(shí)現(xiàn)復(fù)雜的行為決策,需要人工設(shè)計(jì)大量的狀態(tài);車輛有可能陷入有限狀態(tài)機(jī)沒有考慮過的狀態(tài);如果有限狀態(tài)機(jī)沒有設(shè)計(jì)死鎖保護(hù),車輛甚至可能陷入某種死鎖。
動(dòng)作規(guī)劃
通過規(guī)劃一系列的動(dòng)作以達(dá)到某種目的(比如說規(guī)避障礙物)的處理過程被稱為動(dòng)作規(guī)劃。通常來說,考量動(dòng)作規(guī)劃算法的性能通常使用兩個(gè)指標(biāo):計(jì)算效率(Computational Efficiency)和完整性(Completeness),所謂計(jì)算效率,即完成一次動(dòng)作規(guī)劃的處理效率,動(dòng)作規(guī)劃算法的計(jì)算效率在很大程度上取決于配置空間(Configuration Space),如果一個(gè)動(dòng)作規(guī)劃算法能夠在問題有解的情況下在有限時(shí)間內(nèi)返回一個(gè)解,并且能夠在無解的情況下返回?zé)o解,那么我們稱該動(dòng)作規(guī)劃算法是完整的。
配置空間:一個(gè)定義了機(jī)器人所有可能配置的集合,它定義了機(jī)器人所能夠運(yùn)動(dòng)的維度,最簡(jiǎn)單的二維離散問題,那么配置空間就是[x, y],無人車的配置空間可以非常復(fù)雜,這取決于所使用的運(yùn)動(dòng)規(guī)劃算法。
在引入了配置空間的概念以后,那么無人車的動(dòng)作規(guī)劃就變成了:在給定一個(gè)初始配置(Start Configuration),一個(gè)目標(biāo)配置(Goal Configuration)以及若干的約束條件(Constraint)的情況下,在配置空間中找出一系列的動(dòng)作到達(dá)目標(biāo)配置,這些動(dòng)作的執(zhí)行結(jié)果就是將無人車從初始配置轉(zhuǎn)移至目標(biāo)配置,同時(shí)滿足約束條件。
在無人車這個(gè)應(yīng)用場(chǎng)景中,初始配置通常是無人車的當(dāng)前狀態(tài)(當(dāng)前的位置,速度和角速度等),目標(biāo)配置則來源于動(dòng)作規(guī)劃的上一層——行為規(guī)劃層,而約束條件則是車輛的運(yùn)動(dòng)限制(最大轉(zhuǎn)角幅度,最大加速度等)。
顯然,在高維度的配置空間來動(dòng)作規(guī)劃的計(jì)算量是非常巨大的,為了確保規(guī)劃算法的完整性,我們不得不搜索幾乎所有的可能路徑,這就形成了連續(xù)動(dòng)作規(guī)劃中的“維度災(zāi)難”問題。目前動(dòng)作規(guī)劃中解決該問題的核心理念是將連續(xù)空間模型轉(zhuǎn)換成離散模型,具體的方法可以歸納為兩類:組合規(guī)劃方法(Combinatorial Planning)和基于采樣的規(guī)劃方法(Sampling-Based Planning)。
運(yùn)動(dòng)規(guī)劃的組合方法通過連續(xù)的配置空間找到路徑,而無需借助近似值。由于這個(gè)屬性,它們可以被稱為精確算法。組合方法通過對(duì)規(guī)劃問題建立離散表示來找到完整的解,如在Darpa城市挑戰(zhàn)賽(Darpa Urban Challenge)中,CMU的無人車BOSS所使用的動(dòng)作規(guī)劃算法,他們首先使用路徑規(guī)劃器生成備選的路徑和目標(biāo)點(diǎn)(這些路徑和目標(biāo)點(diǎn)事融合動(dòng)力學(xué)可達(dá)的),然后通過優(yōu)化算法選擇最優(yōu)的路徑。
另一種離散化的方法是網(wǎng)格分解方法(Grid Decomposition Approaches),在將配置空間網(wǎng)格化以后我們通常能夠使用離散圖搜索算法(如A*)找到一條優(yōu)化路徑。
基于采樣的方法由于其概率完整性而被廣泛使用,最常見的算法如PRM(Probabilistic Roadmaps),RRT(Rapidly-Exploring Random Tree),F(xiàn)MT(Fast-Marching Trees),在無人車的應(yīng)用中,狀態(tài)采樣方法需要考慮兩個(gè)狀態(tài)的控制約束,同時(shí)還需要一個(gè)能夠有效地查詢采樣狀態(tài)和父狀態(tài)是否可達(dá)的方法。后文我們將詳細(xì)介紹State-Lattice Planners,一種基于采樣的運(yùn)動(dòng)規(guī)劃算法。
4.控制
控制層作為無人車系統(tǒng)的最底層,其任務(wù)是將我們規(guī)劃好的動(dòng)作實(shí)現(xiàn),所以控制模塊的評(píng)價(jià)指標(biāo)即為控制的精準(zhǔn)度。控制系統(tǒng)內(nèi)部會(huì)存在測(cè)量,控制器通過比較車輛的測(cè)量和我們預(yù)期的狀態(tài)輸出控制動(dòng)作,這一過程被稱為反饋控制(Feedback Control)。
反饋控制被廣泛的應(yīng)用于自動(dòng)化控制領(lǐng)域,其中最典型的反饋控制器當(dāng)屬PID控制器(Proportional-Integral-Derivative Controller),PID控制器的控制原理是基于一個(gè)單純的誤差信號(hào),這個(gè)誤差信號(hào)由三項(xiàng)構(gòu)成:誤差的比例(Proportion),誤差的積分(Integral)和誤差的微分(Derivative)。
PID控制因其實(shí)現(xiàn)簡(jiǎn)單,性能穩(wěn)定到目前仍然是工業(yè)界最廣泛使用的控制器,但是作為純反饋控制器,PID控制器在無人車控制中卻存在一定的問題:PID控制器是單純基于當(dāng)前誤差反饋的,由于制動(dòng)機(jī)構(gòu)的延遲性,會(huì)給我們的控制本身帶來延遲,而PID由于內(nèi)部不存在系統(tǒng)模型,故PID不能對(duì)延遲建模,為了解決這一問題,我們引入基于模型預(yù)測(cè)的控制方法。
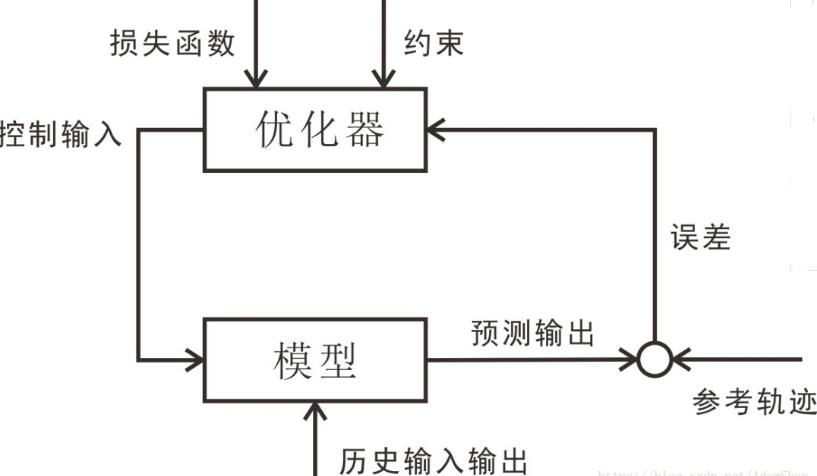
預(yù)測(cè)模型:基于當(dāng)前的狀態(tài)和控制輸入預(yù)測(cè)未來一段時(shí)間的狀態(tài)的模型,在無人車系統(tǒng)中,通常是指車輛的運(yùn)動(dòng)學(xué)/動(dòng)力學(xué)模型;
反饋校正:對(duì)模型施加了反饋校正的過程,使預(yù)測(cè)控制具有很強(qiáng)的抗擾動(dòng)和克服系統(tǒng)不確定性的能力。
滾動(dòng)優(yōu)化:滾動(dòng)地優(yōu)化控制序列,以得到和參考軌跡最接近的預(yù)測(cè)序列。
參考軌跡:即設(shè)定的軌跡。
下圖表示模型預(yù)測(cè)控制的基本結(jié)構(gòu),由于模型預(yù)測(cè)控制基于運(yùn)動(dòng)模型進(jìn)行優(yōu)化,在PID控制中面臨的控制延時(shí)問題可以再建立模型考慮進(jìn)去,所以模型預(yù)測(cè)控制在無人車控制中具有很高的應(yīng)用價(jià)值。
5.小結(jié)
在本結(jié)我們概述了無人駕駛系統(tǒng)的基本結(jié)構(gòu),無人駕駛軟件系統(tǒng)通常被劃分為三層:感知,規(guī)劃和控制。從某種程度上而言,無人車在這種分層體系下就可以看作是一個(gè)“載人機(jī)器人”,其中,感知具體包括環(huán)境感知和定位,近年來深度學(xué)習(xí)的突破,使得基于圖像和深度學(xué)習(xí)的感知技術(shù)在環(huán)境感知中發(fā)揮了越來越重要的作用,借助人工智能,我們已經(jīng)不再局限于感知障礙物,而逐漸變成理解障礙物是什么,理解場(chǎng)景,甚至預(yù)測(cè)目標(biāo)障礙物的行為,機(jī)器學(xué)習(xí)和深度學(xué)習(xí)的內(nèi)容我們將在后面兩章詳細(xì)了解。



























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論