 電子發燒友App
電子發燒友App


1引言
在電子技術迅速發展以及在汽車上廣泛應用的今天,汽車電子化程度越來越高。汽車電子系統中電子控件繁多、通信復雜度增大必然導致整車布線龐大而且復雜,安裝空間緊缺,運行可靠性降低,故障維修難度增大。并且為提高信號利用率,要求數據信息互通,資源共享,傳統的電氣系統點對點的通訊方式已遠不能滿足這種需求。對上述問題,在已有成熟的計算機網絡和現代控制技術的基礎上,汽車網絡技術應運而生。通過總線將汽車上的各種電子裝置與設備連成一個網絡,實現設備之間的信息共享,既減少了線束, 又可更好地控制和協調汽車的各個系統,使汽車性能達到最佳。
2系統硬件設計
本硬件系統所設計的車載網絡具備數據處理、數據存儲、數據通信、參數設置、顯示等功能,能夠很好地對傳感器采集到的車速、車內溫度、發動機運行狀態、水溫以及油量等數據進行傳輸、處理、存儲,并通過顯示屏顯示,使駕駛員及時了解車體總的運行狀況。系統按功能主要分為處理器模塊、USB接口模塊、存儲模塊、 UART異步串行口模塊、CAN模塊、10/100M以太網接口模塊、顯示模塊以及電源。系統總體結構如圖2.1所示。
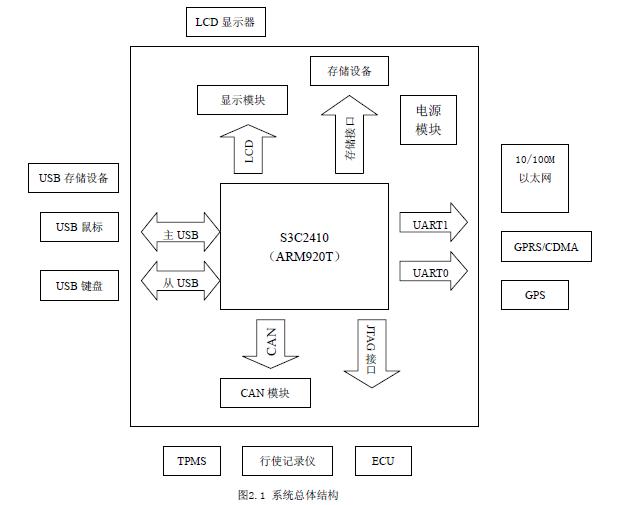
2.1 處理器模塊
該系統采用Samsung公司開發的一種32位RISC微處理器S3C2410,內含一個 ARM920T內核,芯片中集成了16KB 指令Cache、16KB 數據Cache、MMU、外部存儲器控制器、NANDFlash控制器、1個LCD控制器、SDRAM控制器、 3個通道兩個獨立的 UART、4個通道的DMA、 8通道的10位ADC、觸摸屏接口、IIC總線接口、1個USB主機接口,1個USB設備接口、117位通用I/O口和24位外部中斷源。 S3C2410x支持從NAND Flash啟動,系統采用NAND Flash與SDRAM組合,可以獲得非常高的性價比。
2.2USB接口模塊
S3C2410的USB支持USB1.1版本,由懸空和喚醒功能。USB設備控制器可以用DMA接口提供一個高性能完備的速率功能控制解決方案,允許批量傳輸、中斷傳輸和控制傳輸。S3C2410擴展USB十分方便,按照USB1.1標準協議連接即可,可以同時支持USB的低速和高速傳輸。
2.3UART串行口模塊
UART,指的是異步串行口。在 ARM9微控制器中包含有兩個UART0和UART1。UART0僅提供TXD和RXD信號引腳,UART1增加了一個調制截調器 MODEM接口,其余方面兩者都是完全相同的。
2.4 CAN模塊
本系統采用 Philips公司生產的適合汽車環境和一般工業系統環境的獨立 CAN控制器MCP2510。MCP2510支持 CAN2.0B,而且具有一些新特征,應用非常廣泛,是比較典型的獨立CAN控制器。SJA1000有兩種操作模式,即基本CAN模式和具有很多擴展功能的Peli CAN模式。
2.5顯示模塊
由于本系統選用芯片已集成了LCD控制器,所以只要選擇合適的 LCD顯示屏即可。系統選擇SHARP公司的LQ080V3DG01顯示屏。 LQ080V3DG01是一款 TFT-LCD顯示模塊,它由彩色TFT-LCD模板、驅動電路、控制電路、電源電路和背光單元組成,顯示分辨率為RGB640×480,具備3.3V和 5V兩種供電方式。
3驅動程序設計
車載網絡系統的軟件由三部分組成:實時操作系統、硬件驅動程序和運行于操作系統、 10/100M以太網USB存儲設備、 USB鼠標、 USB鍵盤、 GPRS/CDMA、 GPS 之上的應用程序。實時操作系統采用源碼公開的Linux操作系統。硬件驅動程序主要為USB設備驅動、CAN控制器驅動、串口驅動和LCD控制器驅動。
3.1 USB設備驅動程序的設計
?Linux的USB內核子系統中,提供了幾個與設備驅動程序開發直接相關的核心數據結構,定義于內核源代碼的
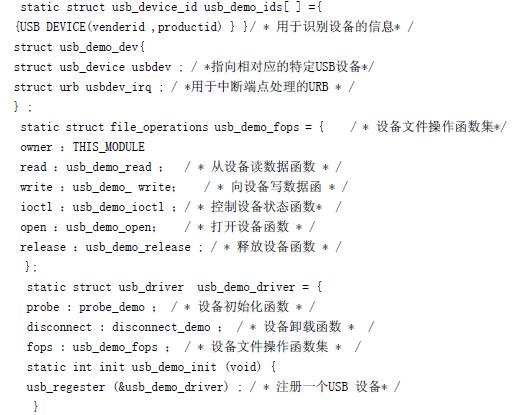
以上即為Linux中一個典型USB設備驅動程序的框架,通常包含設備初始化、設備卸載、設備打開、設備釋放以及對設備進行讀、寫、控制等部分,是一種相對固定的格式。
3.2CAN控制器驅動程序的設計
Linux下驅動程序的編寫有特定的規以及一些必要的模塊,init_module模塊是驅動程序中用來加載設備的,系統初始化時調用。此處用 arm9200_mcp2510_init()作為CAN總線驅動程序的入口函數,他將主要完成對MCP2510初始化,調用 register_chrdev()函數向系統注冊字符型設備驅動程序,使用request_irq()函數為CAN總線的中斷處理程序。根據傳遞CAN 數據的要求,設計了如下的數據結構予以存放一幀數據和對接收緩沖區進行管理:
Typedef struct{ unsigned int id; / * CAN網絡中節點的標志符 * /
unsigned char data[8]; /* 要傳的數據,最大為8個字節 * /
unsigned char dlc; / * 發送的數據長度 * /
int IsExt; / * 判斷消息是否為擴展幀 * /
}
candata; Typedef struct{ Candata MCP2510_Candata[128];/ * 定義一個接收緩沖區 * /
int nCanRevpos; / *數據存入緩沖區的位置指針 * /
int nCanReadpos; / *數據讀出的位置指針 * /
int loopbackmode;
wait_queue_head_t wq;
spinlock_t lock;
}
MCP2510_DEV;
數據結構file_operations是驅動程序中一個重要的數據結構,內核就是通過這個結構來訪問驅動的。應用程序通過對_read()、_write()、_ioctl()函數調用驅動中相應的程序來讀寫數據和控制字符設備的工作。
3.3 串口驅動程序的設計
串口驅動程序采用查詢方式,主要包括串口初始化函數、數據接收函數和數據發送函數。串口初始化函數USIinit()主要是用來設置 USART工作是的參數,用戶應用程序可以通過調用數據接收函數RevUSData()對接收到的函數進行各種處理。USART的數據接收和發送都是一個主動的過程,因此此函數的設計較為簡單。數據發送函數SendUSData()類似于數據接收函數,可以被用戶程序調用。
3.4 LCD控制器驅動程序的設計
在驅動LCD設計過程中首要的是要配置LCD控制器,而在配置LCD控制器時最重要的則是指定幀緩沖區(FrameBuffer)。幀緩沖設備對應的設備文件是/dev/fb*,數據結構如下:
Static struct file_operations
fb_fops={ ower:THIS_MODULE,
read:fb_read,
write:fb_write,
ioctl:fb_ioctl,
mmap:fb_mmap,
open:fb_open,
}
其中的函數對具體的硬件進行操作,對寄存器進行設置,對顯示緩沖進行映射。初始化函數首先初始化LCD控制器,在Linux中可以用kmalloc()函數動態分配連續LCD顯示緩沖區。接著就是初始化一個fb_info結構,補充成員變量,調用register_framebuffer(& fb_info),將fb_info注冊入內核。結構fb_info的成員函數:
struct fb_ops{
int (*fb_get_fix)(struct fb_fix_screeninfo *fix, int con, struct fb_info *info);
int (*fb_get_var)(struct fb_var_screeninfo *var, int con, struct fb_info *info);
int (*fb_set_var)(struct fb_var_screeninfo *var, int con, struct fb_info *info);
}
4結束語
本文詳細介紹了嵌入式車載網絡系統的底層硬件和驅動程序的設計并成功地完成了硬件與軟件的調試。本文作者創新點:此網絡系統極大地減少了電控裝置數,節省了粗大線束占用的汽車寶貴空間資源以及實現了汽車內部電子儀表間的數據共賞、通信與處理,從而提高了汽車的安全性能。










 工商網監
工商網監
評論