 電子發燒友App
電子發燒友App


當奧迪在 2017 年底推出重新設計的 A8 轎車時,該公司將其吹捧為汽車行業的首款 3 級轎車。整個汽車行業仍在與奧迪當時面臨的技術問題和陌生的成本結構作斗爭。System Plus 進行的拆解為以下幾個問題提供了寶貴的見解:
開一輛 3 級車需要什么?
A8 傳感器套件包括什么?
3 級汽車需要多少處理能力?
它是驅動奧迪中央駕駛輔助控制器 zFAS 的 GPU、SoC、CPU 還是 FPGA?
zFAS 的成本是多少?
奧迪如何使用市場上已經在其他應用中嘗試和測試的芯片實現 3 級功能可能具有啟發意義,尤其是與兩年后(2019 年)推出“全自動駕駛計算機”板的特斯拉相比這在很大程度上依賴于兩個本土的自動駕駛芯片。
System Plus 拆解包括超越簡單的逆向工程和識別硬件元素的分析。該公司還執行“逆向成本核算”——估算公司采購特定組件和制造產品所需的成本。System Plus 對 A8 的逆向成本計算表明,zFAS 成本的 60%(估計為 290 美元)是由半導體成本驅動的。這并不令人吃驚,因為現代汽車中 80% 到 85% 的內容是電子產品。然而,這并不是關于成本的令人吃驚的事情。
利潤率
System Plus Consulting的首席執行官 Romain Fraux 表示,真正讓汽車 OEM 感到震驚的是,沒有一家汽車公司愿意為每個組件支付 50% 的利潤率——英偉達、英特爾和其他公司為其旗艦芯片解決方案收取的費用。這為汽車原始設備制造商打開了通往全新世界的大門,促使他們重新思考高度自動化汽車的計算。
System Plus 拆解/成本估算不包括自動駕駛汽車的軟件開發成本。然而,在 zFAS 中使用 FPGA (Altera Cyclone) 表明奧迪試圖保留其已經開發的自有軟件資產。
在過去的 18 個月里,一些領先的 OEM 已經開始暗示他們希望設計自己的自動駕駛汽車芯片,就像特斯拉一樣。這種方法使他們能夠在硬件和軟件開發方面控制自己的命運。然而,考慮到芯片設計的高成本,汽車原始設備制造商是否最好單獨行動還不清楚。
A8 的另一個重要方面是,奧迪在所有汽車 OEM 中推出了第一款商用車,以展示一條通往自主的道路。
在 A8 發布時,車內的技術被宣傳為“自動駕駛突破”,其中包括一個名為 Traffic Jam Pilot 的系統。激活后,Traffic Jam Pilot 據說可以使人類駕駛員從談判走走停停的交通中解脫出來。
但這些精心設計的計劃與“交接問題”(在計算機出現故障時提醒并吸引分心的人)相沖突,該問題從一開始就一直困擾著 3 級車輛的概念。
今天,A8 已經出現在街頭,但沒有一款 A8 的 3 級自動駕駛功能在現實世界中被激活和運行。
然而,這并不是對奧迪的打擊。A8 向 AV 行業清楚地表明了它所面臨的挑戰。行業領導者必須先解決所有監管、技術、安全、行為、法律和業務相關的復雜問題,然后才能吹捧機器人汽車的烏托邦式未來。這部分解釋了汽車原始設備制造商、一級供應商、芯片供應商以及技術和服務公司(即 Waymo、優步)制定 安全標準的增長勢頭。
引擎蓋下的 A8
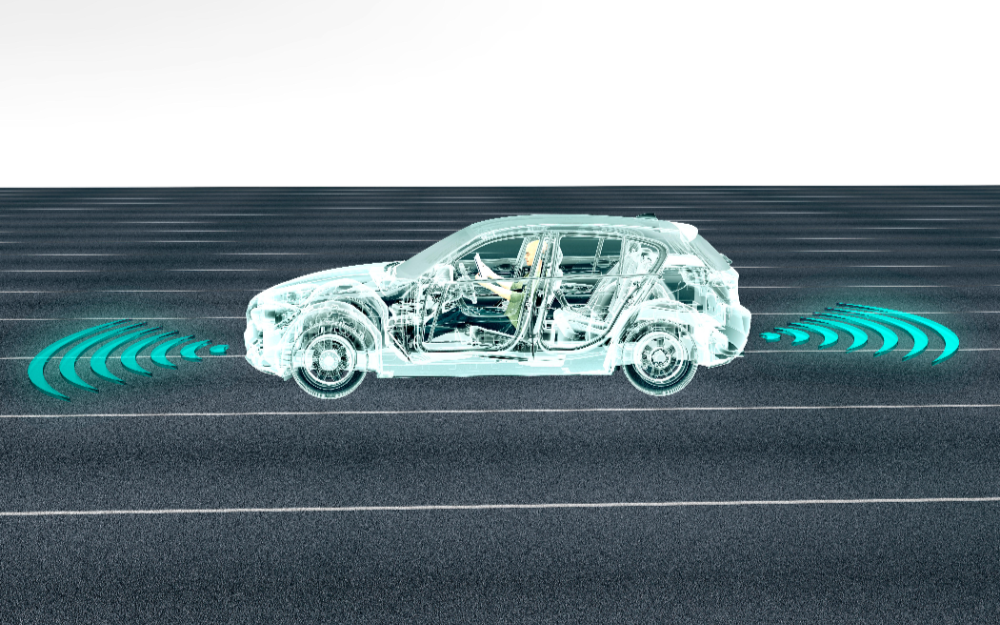
汽車制造商面臨的挑戰將不再是提供從 0 到 100 公里/小時的最快速度或最佳加速度,而是確保越來越先進的自動駕駛和輔助系統。這是奧迪A8 3級自動駕駛的目標,率先使用了激光雷達技術。
A8 的傳感器套件還包括攝像頭、雷達和超聲波傳感器。奧迪 A8 將在最擁擠的道路上自動管理駕駛,無需駕駛員干預。奧迪規定,駕駛員可以隨時將手從方向盤上移開,并且根據當地法律法規,可以從事其他活動,例如在車上看電視。車輛可以執行大多數駕駛任務,但仍需要人工干預(圖 1)。
圖 1:奧迪 A8 的關鍵要素
Fraux 列出了奧迪 A8 內部的創新技術:“奧迪是第一款具有 3 級自動駕駛功能的汽車。安裝在奧迪 A8 上的 Traffic Jam Pilot 系統使用傳感器融合和世界上第一臺激光掃描儀,負責在高速公路和高速公路上以高達 60 公里/小時的速度在緩慢行駛的交通中駕駛。” (注意:此 3 級功能,然而,迄今為止從未激活過。)
3 級自動駕駛和計算平臺
數字技術可以承擔駕駛員應該完成的相同任務,同時提供更高的安全性和舒適性。長期目標是擁有完全聯網的道路——汽車智能電網。交通擁堵和環境污染減少,安全顯著提高。
自動駕駛是汽車界越來越重要的話題。有關該部門進展和新事物的新聞已列入議程。用于奧迪 A8 的 3 級被定義為高度自動化駕駛。該系統能夠減輕駕駛員對車輛縱向和橫向運動的持續控制的需要。
Fraux 說:“奧迪 A8 由多種傳感器和一個由 Aptiv 與四個處理器芯片組合而成的 zFAS 控制器組成。” zFAS(圖 2)是第一個集中式計算平臺。計算機充當中央集線器,處理超聲波傳感器(前、后和側面)、360° 攝像頭(前、后和側鏡)、中程雷達(各個角度)以及長測距雷達和車輛前部的實時激光掃描儀。
圖 2:Aptiv zFAS 控制器
zFAS 中
的大量處理器 構成平臺的處理器是 Nvidia Tegra K1,用于交通信號識別、行人檢測、碰撞警告、燈光檢測和車道識別。Tegra K1 具有八層 PCB,集成了 192 個 Cuda 內核,與 Nvidia 集成到當前市場上支持 DirectX 11 和 OpenGL 4.4的 Kepler GPU 內的單個 SMX 模塊中的數量相同(圖 3 )。
圖 3:英偉達 Tegra K1
當您考慮集成到其中的傳感器數量時,在汽車中擁有非常強大的處理器非常重要。Intel/Mobileye 的 EyeQ3 負責圖像處理。為了滿足功耗和性能目標,EyeQ SoC 采用更精細的幾何形狀進行設計。Eye3 中,Mobileye 使用的是 40 納米 CMOS,而該公司將在第五代 SoC EyeQ5 中使用 7 納米 FinFET。每個 EyeQ 芯片都具有異構、完全可編程的加速器,每種加速器類型都針對自己的算法系列進行了優化。
奇怪的是,Nvidia Tegra K1 和 Mobileye EyeQ 3 不足以處理 3 級車輛預期的所有高級駕駛員輔助系統 (ADAS) 任務。zFAS 內部是用于數據預處理的 Altera Cyclone 和用于監視安全操作的 Infineon Aurix Tricore。Altera Cyclone 系列 FPGA 器件基于 1.5-V、0.13-μm、全層銅 SRAM 工藝,具有高達 20,060 個邏輯元件 (LE) 的密度和高達 288 kbits 的 RAM。
英飛凌 Aurix 架構用于汽車行業動力總成和安全應用的性能優化。TriCore 是第一個為實時嵌入式系統優化的統一、單核、32 位微控制器-DSP 架構。
奧迪 A8 中的傳感器 在
汽車界,ADAS 已成為所有新車獲得更高 Euro NCAP 評級的必備條件。在圖 1中,我們可以找到 System Plus 找到的奧迪 A8 中設備的詳細列表。“制造商正在市場上開發越來越高效的雷達傳感器,”Fraux 說。“我們可以區分一些公司,例如 Aptiv、Veoneer、ZF、法雷奧、博世、Mando、Denso 和 Ainstein。”
特別是在奧迪A8中,我們可以看到奧托立夫的第三代汽車夜視攝像頭、安波福的車道輔助前置攝像頭、法雷奧的SCALA激光掃描儀、博世的LRR4 77-GHz遠程雷達傳感器、安波福的R3TR 76-GHz中程雷達傳感器。
奧托立夫夜視攝像頭由兩個模塊組成:攝像頭和遠程處理單元(圖 4)。紅外夜視攝像機由 FLIR 的 17 微米像素高清氧化釩微測輻射熱計 ISC0901 組成。該設備提供了一種工程方法,具有復雜的光學系統和基于 FPGA 陣列和自定義算法的復雜數值處理系統。

圖4:奧托立夫第三代車載夜視攝像頭
Aptiv 的車道輔助前置攝像頭安裝在后視鏡上,可提供 80 m 的范圍和 36 幅圖像/秒的幀。該相機使用安森美半導體提供的 1.2 兆像素 CMOS 圖像傳感器和 8 位 Microchip PIC 微控制器。zFAS 控制單元使用 Mobileye EyeQ3 處理芯片管理圖像映射和識別軟件(圖 5)。
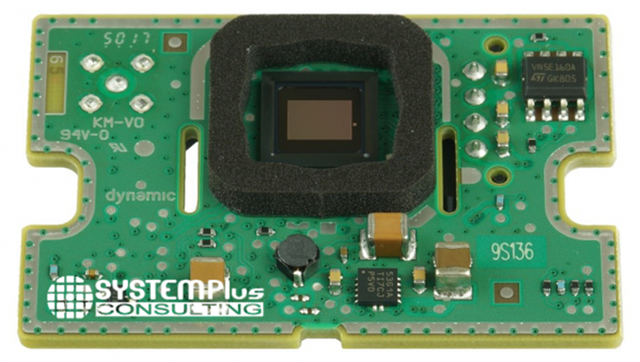
圖 5:Aptiv 車道輔助前置攝像頭的 PCB
LRR4 是一款多模雷達,帶有來自博世的六個固定雷達天線。四個中心布置的天線提供了對環境的高速記錄,產生了一個孔徑角為 ±6° 的聚焦波束,并且對相鄰車道的交通干擾最小。在近場,LRR4 的兩個外部天線將視場擴大到 ±20°,提供 5 m 的范圍,能夠快速檢測進入或離開車道的車輛(圖 6)。

圖 6:遠程雷達傳感器(圖片:System Plus)
Aptiv 的短程雷達傳感器由兩個發射器和四個接收器通道組成,工作在 76 至 77 GHz 頻段,這是汽車雷達應用的標準。PCB 使用單片微波集成電路 (MMIC) 和腔波導。射頻 (RF) PCB 基板使用玻璃增強碳氫基陶瓷層壓板,完全不含 PTFE(圖 7和圖8)。

圖 7:Aptiv R3TR 76-GHz 短程雷達概覽
圖 8:Aptiv R3TR 76-GHz 短程雷達電子板
激光雷達技術
奧迪 A8 的關鍵元素是激光雷達。這是汽車制造商首次使用激光掃描儀。它是一種基于機械系統的激光雷達,采用旋轉鏡技術和 905 納米波長的邊緣發射技術。該設備提供 150 m 的范圍,具有 145° 水平和 3.2° 垂直的 FOV。電機控制單元由帶有控制驅動器的定子和轉子以及用于運動檢測的 MPS40S 霍爾效應傳感器組成。霍爾效應傳感器響應磁場而改變其輸出電壓。這是一個持久的解決方案,因為沒有機械部件會隨著時間的推移而磨損。集成包減小了系統的大小和實現的相對復雜性(圖9、10和11)。
LiDAR 系統基于飛行時間 (ToF),可測量精確的定時事件(圖 12)。最新的發展已經看到了幾個多光束 LiDAR 系統,它們可以生成車輛周圍環境的準確 3D 圖像。該信息用于選擇最合適的駕駛操作。
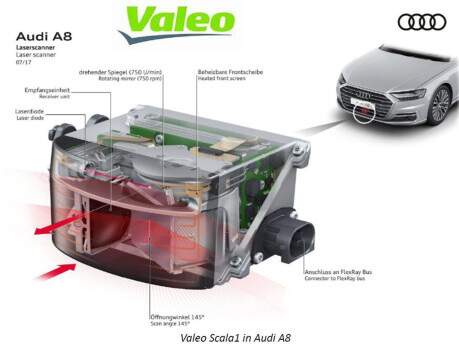
圖 9:激光掃描儀(圖片:System Plus)
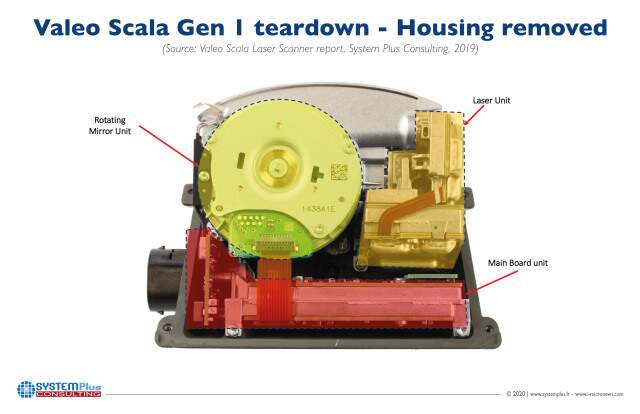
圖 10:奧迪 A8 中實施的激光掃描儀的內部部件
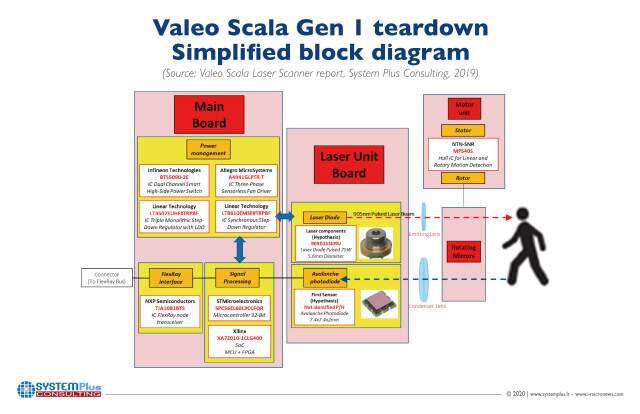
圖 11:激光掃描儀框圖
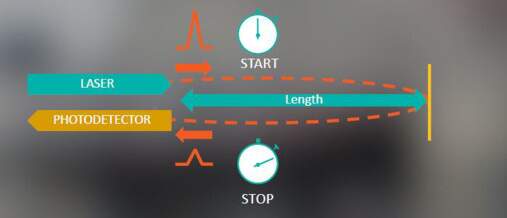
圖 12:飛行時間功能圖(圖片:Maxim Integrated)
邊發射激光器是半導體激光器的原始形式,至今仍廣泛使用。它們的諧振長度允許實現高增益。在該結構內,激光束在典型的雙異質結構波導中被引導。根據波導的物理特性,可以實現具有高光束質量但輸出功率有限或高輸出功率但低光束質量的輸出(圖 13)。

圖 13:邊發射激光二極管
LiDAR 解決方案中使用的激光器采用三引腳 TO 型封裝,裸片面積為 0.27 mm 2,如圖 13所示。激光器的功率為 75 W,直徑為 5.6 mm。“可能由 Sheaumann Laser 在 100 毫米晶圓上制造,”Fraux 說。調節單元使用雪崩光電二極管 (APD) 獲取激光束通過兩個透鏡,一個發射和一個接收后。“APD 可能由 First Sensor 在 150 毫米晶圓上制造,采用 8 引腳 FR4 LLC 封裝,芯片面積為 5.2 毫米2 [見圖 14 ],”Fraux 說。
APD 是一種高速光電二極管,它使用光子倍增來獲得低噪聲信號。APD實現了比PIN光電二極管更高的信噪比,可用于高精度測距儀和微光檢測等廣泛應用。從電子學的角度來看,APD 需要更高的反向電壓,并更詳細地考慮其與溫度相關的增益特性。
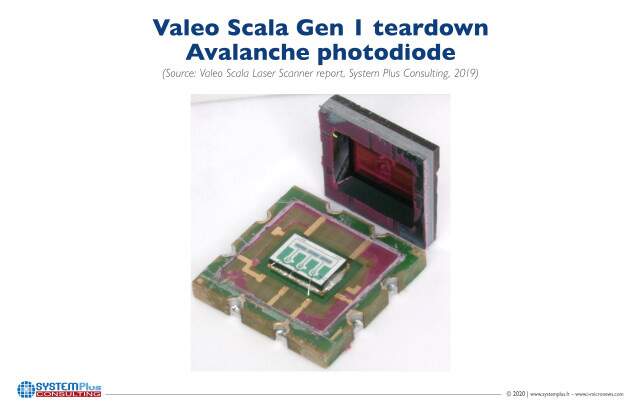
圖 14:雪崩光電二極管
除了激光和運動控制兩個單元外,控制硬件還包括主板,由 Xilinx XA7Z010 SoC 雙核 Arm Cortex-A9、32 位 STMicroelectronics SPC56EL60L3 微控制器和電源管理系統組成ADI 的同步降壓穩壓器、英飛凌的雙通道智能高側電源開關、ADI 的帶 LDO 的三重單片降壓 IC 以及 Allegro 的三相無傳感器風扇驅動器 IC。FlexRay 協議支持數據通信。FlexRay 系統由多個電子控制單元組成,每個電子控制單元都有一個控制器,用于管理對一個或兩個通信通道的訪問。
此類 LiDAR 技術每超過 10 萬臺/年的成本估計可能達到 150 美元,其中很大一部分與主機板和激光器有關(圖 15)。
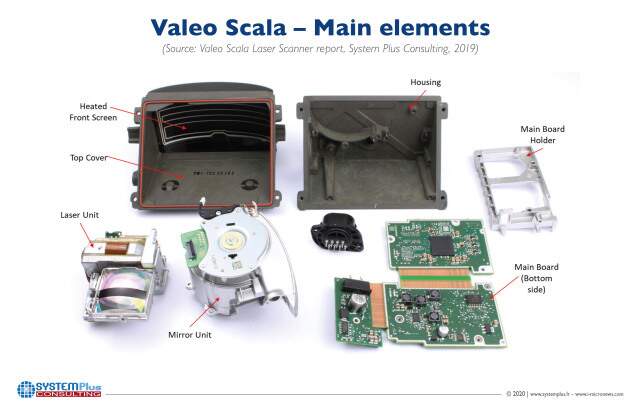
圖 15:拆卸后的激光掃描儀硬件
?
審核編輯 黃昊宇
?















 工商網監
工商網監
評論