 電子發燒友App
電子發燒友App


作者: KURT SCHULER營銷副總裁,Arteris IP www.arteris.com
高級駕駛輔助系統 (ADAS) 和自動駕駛汽車正在推動新芯片的爆炸式增長,其核心是片上系統 (SoC),這是一種運行復雜算法并包含許多硬件加速器的強大半導體設備“大腦。” 事實上,汽車 SoC 是自動駕駛汽車淘金熱的無名英雄,許多人稱之為先進工程的奇跡。
工程師如何有效地設計這些超級芯片,使其每秒處理數十億次操作,以近乎實時地識別和分類道路上的物體?設計處理來自多個傳感器、雷達和攝像頭的信息以執行物體識別、距離估計和 3D 映射的 SoC 的實際挑戰是什么?
以下是推動這些類似超級計算機的處理設備設計的三個趨勢,無論是今天的 ADAS 還是明天的自動駕駛。
1. 管理復雜性汽車 SoC 包含越來越多的一切——CPU、DSP、內存、時鐘等——以執行視覺處理、傳感器融合、信息娛樂等各種任務。汽車 SoC 必須近乎實時地響應物理世界中不斷變化的條件,這進一步增加了設計的復雜性。
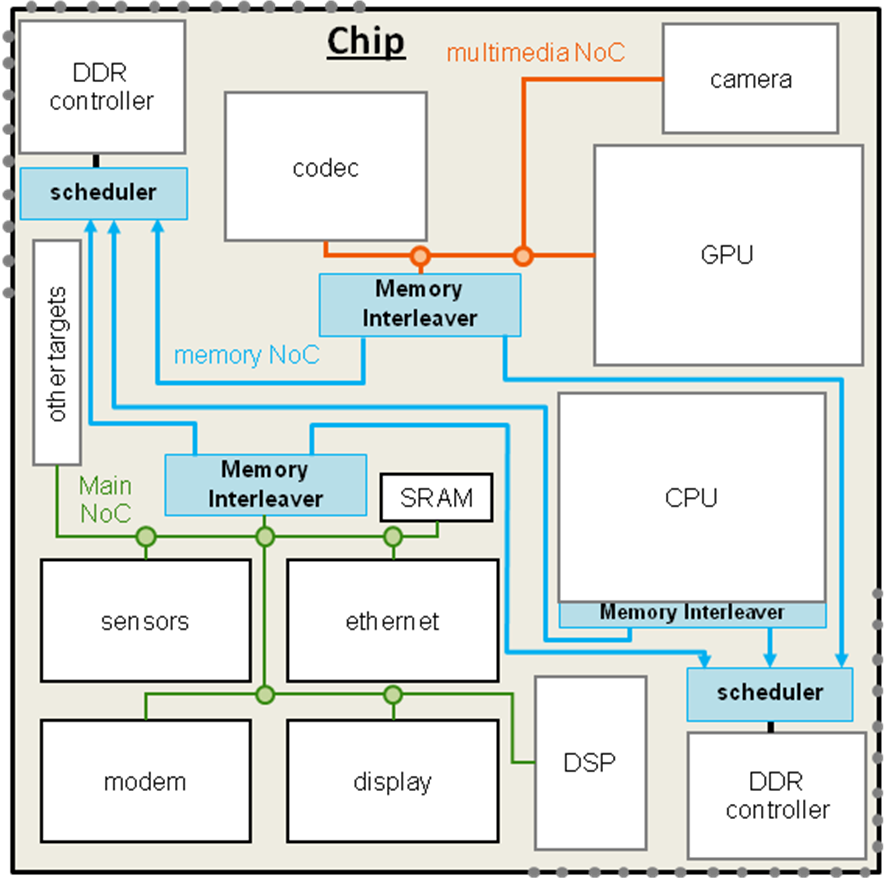
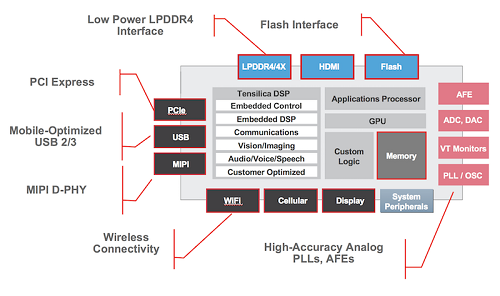
圖 2:隨著高度專業化的 IP 加速器數量的不斷增加,汽車 SoC 設計變得越來越大和越來越復雜。圖片來源:Dream Chip Technologies GmbH。
這些新的汽車 SoC 在單個芯片上利用多個專用處理單元來執行多個同時執行的任務,例如攝像頭視覺、車身控制和信息顯示。片上通信基礎設施是確保芯片上高效數據流的關鍵。隨著處理元件類型和數量的增加,連接這些處理元件的互連和內存架構的作用變得至關重要。
汽車 SoC 不再是緩慢且耗電的片外 DRAM 訪問,而是越來越多地采用內存技術,這些技術可以將數據保存在將要使用的位置附近。與單個處理元件緊密耦合的存儲器通常作為內部 SRAM 實現,并且通常對正在運行的軟件是透明的。這種方法適用于較小的系統,但處理元件數量的增加需要相應增加緊密耦合的存儲器。
另一種方法是擁有可以與多個處理元件共享的 RAM 緩沖區。然而,在這種情況下,訪問必須在軟件級別進行管理,這反過來又會隨著系統的擴展而導致軟件復雜性。這種軟件復雜性可能會導致系統錯誤,從而導致影響 ISO 26262 安全目標的錯誤和故障。
最后,隨著系統變得越來越大,實現硬件緩存一致性技術通常很有用。它允許處理元素共享數據,而無需直接軟件管理的開銷。還有一種緩存一致性新技術,現在在汽車 SoC 中廣泛實施,它允許處理元件有效地相互共享數據,并使用稱為代理緩存的專用可配置緩存作為連貫系統中的對等點。
除了內存架構之外,無論是通過緩沖區實現數據本地化還是緩存一致,片上互連也很重要。它優化了整體數據流以保證服務質量 (QoS),從而確保汽車 SoC 滿足帶寬和延遲要求。
帶寬分配和延遲要求是關鍵任務汽車設計中的一個關鍵因素,尤其是當某些處理可能是不確定的時,例如神經網絡和深度學習處理。在這里,片上互連在實現 SoC 架構方面發揮著至關重要的作用,該架構可確保接近實時的性能,同時避免處理元件的數據不足。
2. 新技術汽車設計也為實施人工智能 (AI) 等新技術提供了動力,因為無法手動創建“if-then-else”規則來處理復雜的現實世界場景。可以處理高度復雜任務的人工智能算法正在被整合到自動駕駛系統和其他必須在近實時領域做出決策的生命關鍵系統中。這就是為什么機器學習是人工智能的一個子集,是自動駕駛汽車中最公開可見的新應用。
機器學習通過體驗式學習實現 ADAS 和自動駕駛中的復雜任務,而使用基于規則的編程幾乎不可能完成這些任務。但是機器學習需要對算法加速和數據流優化進行硬件定制。
因此,在基于機器學習的 SoC 設計中,ADAS 和自動駕駛汽車架構師正在通過添加更多類型的硬件加速器來更精細地分割算法。這些定制硬件加速器充當異構處理元素,并迎合支持實時 3D 映射、LiDAR 點云映射等功能的專用算法。
這些高度專業化的 IP 加速器可以在近乎實時的延遲范圍內發送和接收數據,并提供識別和分類對象所需的巨大帶寬,滿足嚴格且經常相互沖突的 QoS 需求。在這里,芯片設計人員可以通過選擇加速什么、如何加速以及如何將該功能與 SoC 設計的其余部分互連來進行競爭和區分。
關于新技術,還值得一提的是,神經網絡已經成為實現機器學習的最常見方式。神經網絡在這里所做的是在自動駕駛系統中實現深度學習,使用專門的硬件加速器對行人和路標等物體進行分類。
圖 3:神經網絡在汽車 SoC 中實現專門的處理功能和數據流功能。圖片來源:Arteris IP。
深度學習是機器學習的一個分支,它涉及分層算法,以更好地理解數據。它獲取沒有任何意義的原始信息,并構建分層表示,從而可以生成有關其他車輛、行人和整體路邊狀況的見解。
3. 功能安全安全在汽車行業是不容商榷的項目,這使得安全驗證成為關鍵任務汽車應用的 SoC 設計的關鍵部分。換言之,功能安全和符合 ISO 26262 標準對于服務于 ADAS 和自動駕駛應用的 SoC 設計至關重要。
ISO 26262 定義了汽車安全完整性等級 (ASIL) 的五種分類——QM、A、B、C 和 D——其中 ASIL QM 提供基本的質量管理措施,ASIL D 提供最嚴格的安全保護,防止可能導致生命的故障- 威脅性傷害。
有與汽車功能安全相關的特定安全機制技術,包括糾錯碼(ECC)、組件的硬件復制、故障安全控制器和內置自檢(BIST)。這些技術使汽車 SoC 能夠遵守 ISO 26262 標準。
與以軟件為中心的方法相比,在芯片中實施功能安全機制具有許多優勢。首先,它降低了整體復雜性,并使芯片制造商能夠更好地控制系統范圍的安全功能。
然而,與此同時,隨著汽車 SoC 變得越來越大、越來越復雜,IP 塊的數量越來越多,片上通信的作用變得越來越重要,不僅是為了滿足 QoS 要求,而且對于根據 ISO 26262 設計 SoC功能安全標準。片上互連在診斷覆蓋率中起著至關重要的作用,因為它可以看到芯片內傳輸的所有數據。這允許互連 IP 發現并在某些情況下修復錯誤,從而有助于滿足 ISO 26262 汽車功能安全的要求。
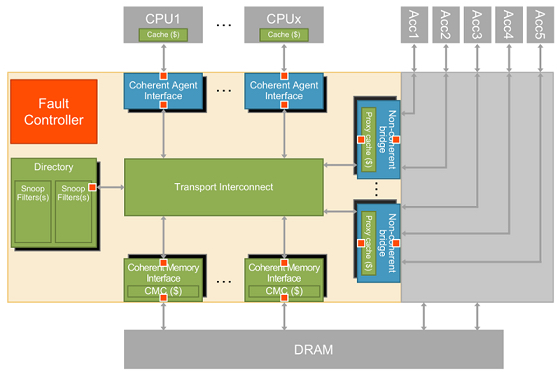
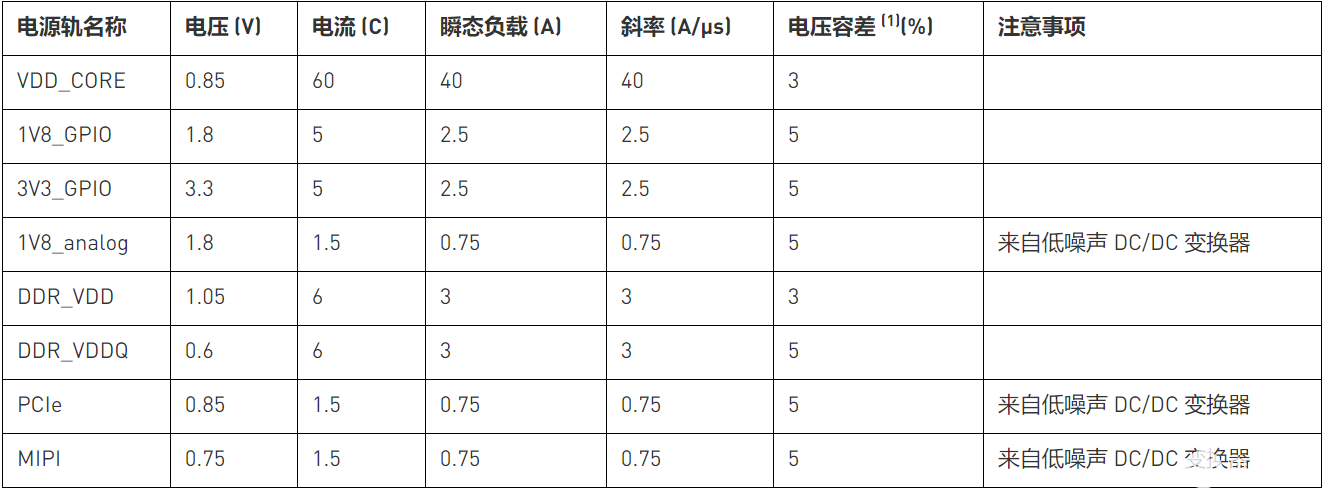
圖 4:這是片上互連為功能安全執行數據流保護的方式。圖片來源:Arteris IP。
結論更好地理解本文中概述的問題將使芯片設計人員能夠快速實現 ADAS 和自動駕駛應用所需的復雜功能。它還將幫助設計人員根據特定的應用要求定制 SoC 硬件架構。
審核編輯 黃昊宇













 工商網監
工商網監
評論