 電子發(fā)燒友App
電子發(fā)燒友App


?關(guān)鍵技術(shù)是未來(lái)智能駕駛的發(fā)展方向,其研究已取得了重大進(jìn)展。然而,由于近期發(fā)生的無(wú)人駕駛事故,人們對(duì)安全性能產(chǎn)生了擔(dān)憂。為了解決這個(gè)安全問(wèn)題,提出了一個(gè)用于智能駕駛的安全系統(tǒng)。該系統(tǒng)通過(guò)智能汽車(chē)感知、決策和控制模塊,為潛在問(wèn)題提供實(shí)時(shí)的安全分析和監(jiān)控服務(wù)。基于預(yù)期功能的安全性概念,對(duì)駕駛場(chǎng)景和系統(tǒng)安全性進(jìn)行分析和評(píng)價(jià)提高智能駕駛的安全性,這可能有助于智能駕駛的發(fā)展。 ?
I.簡(jiǎn)介 ?
進(jìn)入21世紀(jì),智能駕駛汽車(chē)的快速發(fā)展為提高道路交通安全、緩解擁堵帶來(lái)了巨大的社會(huì)效益。作為未來(lái)汽車(chē)的發(fā)展方向,自動(dòng)駕駛汽車(chē)的研究和開(kāi)發(fā)已經(jīng)取得了重大突破。其巨大的商業(yè)利益和廣闊的應(yīng)用前景,贏得了發(fā)達(dá)國(guó)家的支持和認(rèn)可。 ?
然而,任何技術(shù)的成熟應(yīng)用都必須經(jīng)歷一個(gè)漫長(zhǎng)而艱巨的發(fā)展過(guò)程,自動(dòng)駕駛也是如此。在美國(guó),發(fā)生了人類(lèi)歷史上第一起無(wú)人駕駛汽車(chē)致死事件。美國(guó)當(dāng)?shù)貢r(shí)間3月18日晚,在亞利桑那州坦佩市郊區(qū),Uber無(wú)人駕駛測(cè)試車(chē)與一名正在過(guò)馬路的中年婦女相撞。這起事故導(dǎo)致該婦女不幸死亡。這次事故的意義和影響遠(yuǎn)遠(yuǎn)超出其事故本身。美國(guó)當(dāng)?shù)貢r(shí)間5月7日,警方公布了Uber無(wú)人駕駛測(cè)試車(chē)輛致死事件的最新調(diào)查結(jié)果,確認(rèn)無(wú)人駕駛車(chē)輛檢測(cè)到行人的存在,但沒(méi)有采取任何制動(dòng)措施。 ?
智能汽車(chē)的駕駛行為高度依賴(lài)于操作系統(tǒng)的穩(wěn)定性、智能化和安全性。安全風(fēng)險(xiǎn)的主要來(lái)源有以下三類(lèi): ?
A.硬件安全 ?
與傳統(tǒng)汽車(chē)相比,智能駕駛汽車(chē)不需要司機(jī)直接控制汽車(chē),而是將部分或整車(chē)控制權(quán)交給自動(dòng)控制系統(tǒng)。硬件架構(gòu)設(shè)置是否科學(xué)合理;各無(wú)人計(jì)算控制單元及控制器設(shè)置是否完善;無(wú)人駕駛汽車(chē)的傳感器能否快速準(zhǔn)確地獲取道路環(huán)境信息,車(chē)輛運(yùn)動(dòng)傳感和信息融合功能對(duì)無(wú)人駕駛汽車(chē)的駕駛起著決定性的作用。 ?
B.軟件安全 ?
與傳統(tǒng)汽車(chē)相比,自動(dòng)駕駛汽車(chē)的開(kāi)發(fā)時(shí)間較短,技術(shù)發(fā)展還不成熟,軟件系統(tǒng)還需要長(zhǎng)期的可靠性分析。例如,著名的無(wú)人駕駛汽車(chē)制造商谷歌對(duì)無(wú)人駕駛汽車(chē)平臺(tái)進(jìn)行了長(zhǎng)達(dá)9年的封閉測(cè)試,但測(cè)試時(shí)間并不充分,因素也相對(duì)簡(jiǎn)單。因此,其安全性和穩(wěn)定性仍然需要長(zhǎng)期監(jiān)測(cè)。 ?
C.環(huán)境安全 ?
基于人工智能算法,智能駕駛汽車(chē)可以實(shí)現(xiàn)自動(dòng)避開(kāi)障礙物,在道路比較復(fù)雜的情況下完成自動(dòng)駕駛。但是,無(wú)人駕駛汽車(chē)在進(jìn)行駕駛決策時(shí),仍然需要其他參與者的正確駕駛判斷。只有當(dāng)其他駕駛員做出正確駕駛的判斷時(shí),無(wú)人駕駛汽車(chē)的駕駛測(cè)試才會(huì)相應(yīng)地做出正確合理的判斷。 ?
基于以上對(duì)無(wú)人駕駛事故和安全隱患的分析,本文提出了一個(gè)自主車(chē)輛的預(yù)期安全系統(tǒng)。該系統(tǒng)能夠?qū)χ悄荞{駛車(chē)輛的行駛狀態(tài)進(jìn)行監(jiān)控、預(yù)測(cè)和保障,從感知、決策和控制等方面提高智能駕駛的安全性。 ?
II.系統(tǒng)架構(gòu) ?
智能駕駛離不開(kāi)幾個(gè)關(guān)鍵技術(shù)。在宏觀層面上,智能駕駛以環(huán)境感知、路徑規(guī)劃和決策控制等核心技術(shù)為基礎(chǔ)。 ?
綜合前文介紹的關(guān)鍵技術(shù),智能駕駛為真實(shí)駕駛提供了技術(shù)支撐,而安全技術(shù)是自動(dòng)駕駛汽車(chē)能否真正在公共道路上行駛的前提。2011年發(fā)布的ISO26262《道路車(chē)輛功能安全》國(guó)際標(biāo)準(zhǔn)為道路車(chē)輛功能安全提供了一個(gè)系統(tǒng)的解決方案,以解決電子控制系統(tǒng)故障造成的安全風(fēng)險(xiǎn)。
由于自動(dòng)駕駛汽車(chē)可以脫離駕駛員,控制車(chē)輛的部分或全部行為,任何影響其感知、決策和執(zhí)行的因素都可能構(gòu)成車(chē)輛危險(xiǎn)。根據(jù)不同的風(fēng)險(xiǎn)來(lái)源和所需的安全技術(shù),比較分析結(jié)果見(jiàn)表1。 ?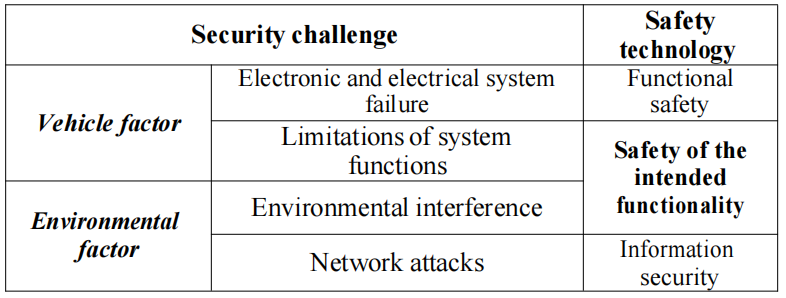
表1 智能駕駛車(chē)輛的危險(xiǎn)因素及所需的安全技術(shù) ?
系統(tǒng)功能的局限性 ?
主要原因是在設(shè)計(jì)和開(kāi)發(fā)期間對(duì)系統(tǒng)功能的定義不能完全涵蓋目標(biāo)市場(chǎng)的使用需求。 ? 對(duì)目標(biāo)場(chǎng)景的考慮不全面,導(dǎo)致系統(tǒng)不能準(zhǔn)確識(shí)別環(huán)境要素;功能仲裁邏輯不合理,導(dǎo)致系統(tǒng)決策錯(cuò)誤;執(zhí)行器響應(yīng)不充分,導(dǎo)致運(yùn)動(dòng)控制偏離預(yù)期。?
環(huán)境干擾 ?
自動(dòng)駕駛會(huì)受到很多因素的影響,比如路況、周?chē)挛锖铜h(huán)境天氣。如何克服環(huán)境干擾,可靠地進(jìn)行環(huán)境識(shí)別、駕駛決策和運(yùn)動(dòng)控制是確保安全駕駛的關(guān)鍵。 ?
預(yù)期安全系統(tǒng)源于預(yù)期功能安全(SOTIF)的概念,旨在為智能駕駛的感知、決策和控制系統(tǒng)(執(zhí)行器響應(yīng))設(shè)計(jì)一種安全監(jiān)管系統(tǒng),克服環(huán)境干擾,改善智能駕駛系統(tǒng)的局限性。擬議的安全系統(tǒng)架構(gòu)如圖所示。 ?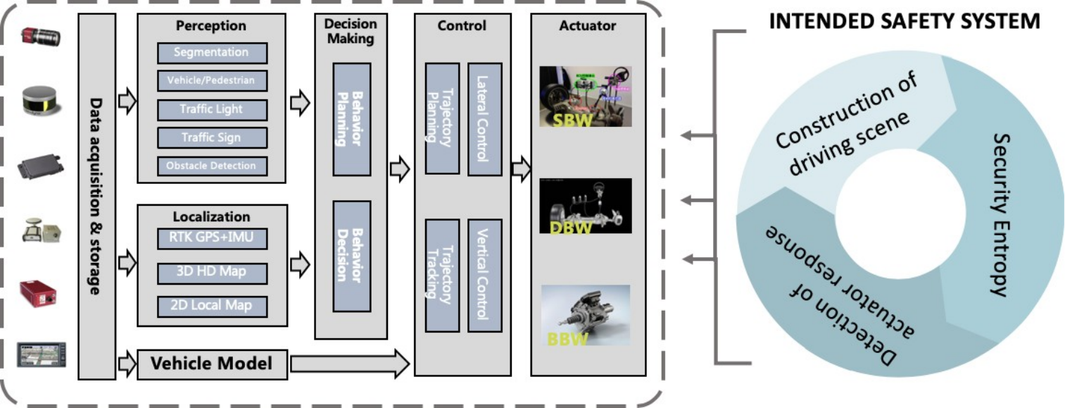
圖1?智能駕駛擬用安全系統(tǒng)的架構(gòu)?
該安全系統(tǒng)預(yù)計(jì)將被分為三個(gè)基本模塊:感知數(shù)據(jù)的處理、決策信息的確定和執(zhí)行器響應(yīng)的檢測(cè)。首先,基于智能汽車(chē)各傳感器的感知數(shù)據(jù),進(jìn)行多傳感器分析與融合,重構(gòu)當(dāng)前駕駛場(chǎng)景。安全系統(tǒng)通過(guò)對(duì)駕駛場(chǎng)景的分析,確定各個(gè)傳感器的置信度,為智能汽車(chē)的決策和控制提供依據(jù)。 ?
其次,對(duì)決策信息的判斷主要基于“安全熵”和對(duì)系統(tǒng)安全的定量評(píng)價(jià)。最后,執(zhí)行器響應(yīng)的檢測(cè)相對(duì)偏向于模擬和測(cè)試。可針對(duì)已知情況選擇軟件在環(huán)/硬件在環(huán)測(cè)試和車(chē)輛測(cè)試。
? III.駕駛場(chǎng)景和系統(tǒng)安全 ?
A.駛場(chǎng)景的構(gòu)建 ?
要對(duì)駕駛場(chǎng)景進(jìn)行分析,首先要建立如圖2所示的場(chǎng)景數(shù)據(jù)庫(kù)。針對(duì)不同的典型場(chǎng)景,通過(guò)收集人類(lèi)駕駛員的駕駛數(shù)據(jù),可公式化駕駛決策并進(jìn)行分析。結(jié)合場(chǎng)景檢索與場(chǎng)景識(shí)別,智能車(chē)輛可以在保證各種功能的前提下,大大提高智能駕駛的安全性。
? 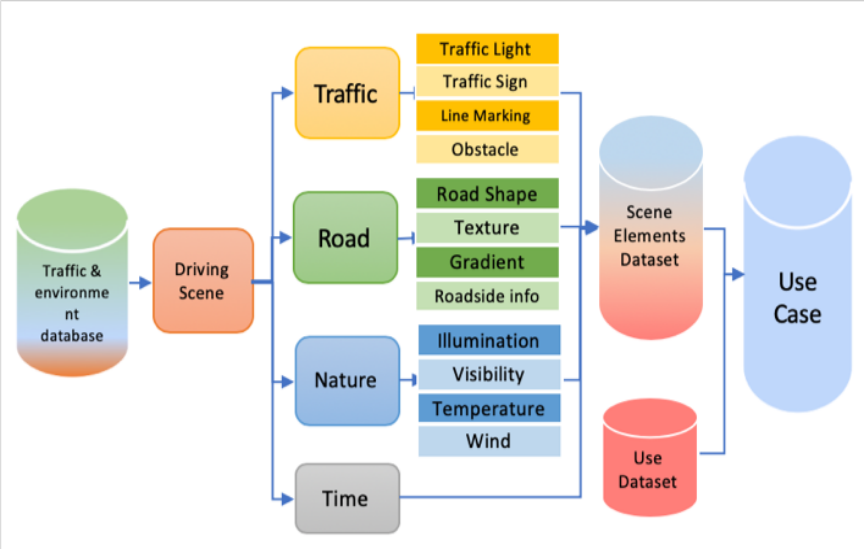
圖2?場(chǎng)景數(shù)據(jù)庫(kù)的組成和構(gòu)建 ?
因此,本文提出一種駕駛場(chǎng)景構(gòu)建方法,通過(guò)將場(chǎng)景的定性分析作為多傳感器融合的基礎(chǔ)。定性分析的方法來(lái)源于自然語(yǔ)言中的知識(shí)提取算法。知識(shí)提取的過(guò)程可以歸納為三個(gè)步驟。第一步是識(shí)別與本體相匹配的概念、概念實(shí)例、屬性和簡(jiǎn)單值;第二步是根據(jù)內(nèi)容和本體定義正確組合識(shí)別的三要素,構(gòu)建正確的知識(shí)三要素;最后一步是根據(jù)本體對(duì)提取的事實(shí)知識(shí)進(jìn)行有效性和完整性檢驗(yàn),刪除無(wú)效的知識(shí)和不完整的知識(shí),確保添加到領(lǐng)域本體知識(shí)庫(kù)的知識(shí)是有效的、完整的。例如,通過(guò)獲取天氣信息,例如今天有雨,結(jié)合已建立的用例庫(kù),可以推斷出,由于環(huán)境干擾,激光雷達(dá)的置信度會(huì)降低。因此,在這種情況下,應(yīng)相應(yīng)減少激光雷達(dá)的權(quán)重以確保安全。 ?
與上述定性分析相結(jié)合,對(duì)駕駛場(chǎng)景的定量分析也必不可少。可以利用模糊數(shù)學(xué)的基本概念,用公式來(lái)定量描述駕駛場(chǎng)景。 ?
S = S(V1 ,V2 ,V3 ,V4) ? 其中V1 代表交通信息,即紅綠燈和交通標(biāo)志, V2 代表道路信息,如道路材料、道路起伏、路側(cè)物體信息,V3 代表自然條件,如雨、雪、霧、霾、氣流、溫度、濕度,V4 代表時(shí)間。 ?
結(jié)合定性和定量的概念,分析各個(gè)要素的影響,根據(jù)不同要素的組合實(shí)現(xiàn)自動(dòng)駕駛決策。目前的決策方法大多過(guò)于單一,無(wú)法完全適用于復(fù)雜的社會(huì)環(huán)境。因此,場(chǎng)景信息不僅可以增強(qiáng)智能駕駛的感知系統(tǒng),還可以針對(duì)不同場(chǎng)景提供不同的駕駛策略,從而提高智能汽車(chē)的環(huán)境適應(yīng)性和駕駛穩(wěn)健性。 ?
B.預(yù)期安全熵 ?
近年來(lái),熵作為一個(gè)普遍概念被提出,熵的應(yīng)用在深度和廣度上有了進(jìn)一步發(fā)展。預(yù)期功能安全性(SOTIF)有望成為智能駕駛的研究熱點(diǎn)之一。為此,提出了預(yù)期安全熵的概念。安全熵可以定義為智能駕駛車(chē)輛的各種預(yù)期功能因素(包括感知、決策、執(zhí)行器等)在熵權(quán)下的不確定性之和。 ?
對(duì)于一個(gè)安全因素xi, 安全性P(xi)可以用來(lái)表示其執(zhí)行安全功能的能力。安全程度可以從熵的角度進(jìn)行分析。必須有一個(gè)與安全程度相對(duì)應(yīng)的安全熵,來(lái)表示安全系數(shù)的不確定性、混沌性和無(wú)序性。當(dāng)安全程度越大,其自身的不確定性、混亂性和無(wú)序性就越小。安全熵是安全因素本身混亂程度的度量,安全熵由P(xi)定義。 ?
S(xi) = log 1/ P(xi) = - log P(xi) (i =1, 2, …, n ) ? 安全系統(tǒng)的熵的定義應(yīng)該由環(huán)境∩車(chē)輛的概率狀態(tài)來(lái)決定。假設(shè)環(huán)境處于異常安全狀態(tài)為P(車(chē)輛|環(huán)境)。 ?
因此,系統(tǒng)的安全熵S(X)被定義為: S(X) = log 1/ P(車(chē)輛|環(huán)境) = -log P(車(chē)輛|環(huán)境) ? 從熵的本質(zhì)意義出發(fā),熵是一個(gè)廣義的測(cè)度。兩種狀態(tài)混合后,熵應(yīng)該是兩種狀態(tài)對(duì)應(yīng)的熵之和,即S=S1+S2。因此,S(環(huán)境∩車(chē)輛)= S(環(huán)境)+ S(車(chē)輛)。 ?
安全熵和熵的概念是安全動(dòng)力學(xué)研究的基礎(chǔ),可以作為解釋安全系統(tǒng)穩(wěn)定性的標(biāo)準(zhǔn),也可用以判斷安全系統(tǒng)是否穩(wěn)定。可以看出,安全熵的定義概念與廣義熵的性質(zhì)一致,從而為安全系統(tǒng)的安全熵和其他領(lǐng)域的熵之間提供了一座橋梁。 ?
IV.未來(lái)發(fā)展
安全是汽車(chē)工業(yè)發(fā)展的永恒主題。通過(guò)分析環(huán)境因素和車(chē)輛因素對(duì)自動(dòng)駕駛的安全影響,闡述了風(fēng)險(xiǎn)的來(lái)源和發(fā)生機(jī)理,并提出了應(yīng)對(duì)措施。通過(guò)充分考慮安全風(fēng)險(xiǎn)的來(lái)源,系統(tǒng)地實(shí)施功能安全、信息安全、SOTIF等安全技術(shù),可以保證自動(dòng)駕駛實(shí)現(xiàn)整體安全,相關(guān)的自動(dòng)駕駛汽車(chē)也可以實(shí)現(xiàn)大規(guī)模應(yīng)用。
本文提出的自動(dòng)駕駛汽車(chē)的預(yù)期安全系統(tǒng),是基于國(guó)際上正在進(jìn)行的SOTIF技術(shù)標(biāo)準(zhǔn)的發(fā)展。該國(guó)際技術(shù)標(biāo)準(zhǔn)是首個(gè)針對(duì)自主車(chē)輛的安全技術(shù)標(biāo)準(zhǔn),對(duì)自動(dòng)駕駛車(chē)輛系統(tǒng)安全技術(shù)的開(kāi)發(fā)和驗(yàn)證具有重要的指導(dǎo)意義。
審核編輯:劉清













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論