 電子發(fā)燒友App
電子發(fā)燒友App


最近自動駕駛圈子發(fā)生了兩件事情,對比起來看會很有意思: 一件發(fā)生在大洋彼岸,曾被兩大國際汽車巨頭(福特和大眾)青睞的 L4 級自動駕駛獨(dú)角獸 Argo AI 突然官宣倒閉。福特 CEO Jim Farley 表示關(guān)停 Argo AI 是因?yàn)?L4 級自動駕駛(主要指 Robotaxi)商業(yè)落地前景不明,投入大且收效甚微,所以決定先停止燒錢,集中資源做 L2、L2+ 級自動駕駛,推動前裝量產(chǎn)。這引起了國內(nèi)自動駕駛從業(yè)者的廣泛關(guān)注。 L4 還要不要燒錢做?無人駕駛到底能不能實(shí)現(xiàn)?何時實(shí)現(xiàn)?觀察者們發(fā)出了一連串靈魂拷問。
? ? 另一件發(fā)生在國內(nèi),11 月的頭一天,自動駕駛技術(shù)公司輕舟智航正式將其自動駕駛解決方案「Driven-by-QCraft」命名為「輕舟乘風(fēng)」,它涵蓋自動駕駛車載軟件、車載硬件和數(shù)據(jù)自動化閉環(huán)等多個方面,可以提供輕舟智航最新的感知、PNC(規(guī)劃和控制)等能力,是一套非常有競爭力的自動駕駛前裝量產(chǎn)方案,里頭最主打的功能就是城區(qū)導(dǎo)航輔助駕駛(城市 NOA)。 ?
福特作為主機(jī)廠的代表,現(xiàn)在正式擁抱自動駕駛前裝量產(chǎn);輕舟智航作為方案供應(yīng)商的代表,現(xiàn)在也投入了自動駕駛前裝量產(chǎn)的懷抱。行業(yè)里的車企和自動駕駛公司正在進(jìn)行某種意義上的「雙向奔赴」。 拋開所謂「靈魂」與「肉體」之爭,現(xiàn)階段還是自動駕駛功能規(guī)模化普及的開始,需要主機(jī)廠和供應(yīng)商雙方通力合作,把蛋糕做大,分蛋糕那是后話。 主機(jī)廠目前也很需要智駕供應(yīng)商:集度、比亞迪、東風(fēng)嵐圖需要百度 Apollo;上汽、智己、通用需要 Momenta;極狐、阿維塔需要華為 ADS;大眾需要地平線;而且這些車企絕不僅僅只用一家供應(yīng)商,一定會是多方案策略。
01
從L2 還是 L4?趨勢逐漸明朗
過去的幾年,自動駕駛技術(shù)商業(yè)化分出了兩條路:一條是直接 L4,發(fā)展 Robotaxi 和其他場景的無人駕駛;一條是乘用車智能輔助駕駛的前裝量產(chǎn),屬于 L2+ 級自動駕駛。 市面上,已經(jīng)有幾家的 Robotaxi 將主駕安全員拿掉并開始收費(fèi)運(yùn)營;各種量產(chǎn)車上的 Pilot 系統(tǒng)、導(dǎo)航輔助駕駛系統(tǒng)、自動泊車系統(tǒng)開始被更多消費(fèi)者接受,成為他們買車的一個重要考量點(diǎn)。
特別是最近,導(dǎo)航輔助駕駛功能開始開進(jìn)城市,這批搞 L2+ 輔助駕駛的殺到了 Robotaxi 的主場,兩股勢力正在交匯。 ? 城市 NOA 所使用的計(jì)算平臺和傳感器其實(shí)和 Robotaxi 逐漸趨同,成本上雖略貴但也處于一個可控范圍,而且在能力規(guī)劃上也接近,都包括穩(wěn)定的車道保持、識別紅綠燈、自動左轉(zhuǎn)右轉(zhuǎn)、自動繞行等等。最大的區(qū)別是主駕上有沒有司機(jī),不過這也只是形式上的。 看上去,從前裝量產(chǎn)出發(fā)的企業(yè),已經(jīng)在商業(yè)化道路上領(lǐng)先于從 Robotaxi 出發(fā)的企業(yè),而且在技術(shù)上并不落下風(fēng)。 這兩年,也有蠻多的 L4 公司,或快或慢介入到自動駕駛前裝量產(chǎn)業(yè)務(wù),想以此來獲得一部分現(xiàn)金流,也為了收集更多道路駕駛數(shù)據(jù),比如百度 Apollo、Momenta、輕舟智航、元戎啟行、文遠(yuǎn)知行、智行者等等,而且他們也沒有放棄部署 Robotaxi 車隊(duì),等于是兩條腿走路,不再單吊 Robotaxi。其中還有些企業(yè)的業(yè)務(wù)重心越來越多地偏向于前裝量產(chǎn)業(yè)務(wù),Momenta 最典型了,陸續(xù)拿到了很多主機(jī)廠的合作訂單。
福特這一次的壯士斷腕,關(guān)停 Argo AI,其實(shí)也表明,現(xiàn)階段還是應(yīng)該做好自動駕駛系統(tǒng)的前裝量產(chǎn),主機(jī)廠們目前更需要 L2、L2+ 自動駕駛系統(tǒng),而不是 L4。這么看來,國內(nèi)這一批提前轉(zhuǎn)型的 L4 公司們還是蠻有預(yù)見性的。 但是軟件公司要做系統(tǒng)的車規(guī)級量產(chǎn),又何嘗是件容易的事情,算法的穩(wěn)定成熟度、算法的適配度、計(jì)算硬件的車規(guī)級、算法和硬件的互相匹配、成本的壓縮、團(tuán)隊(duì)和工具鏈的支持力度等等,都是擺在算法公司面前的難題。
極致控制成本、極致壓縮開發(fā)周期,現(xiàn)在的自動駕駛前裝量產(chǎn)就是這么「卷」,即使「硬件預(yù)埋」已經(jīng)幫很多主機(jī)廠和供應(yīng)商爭取了時間,但是消費(fèi)者們一定不愿意自己花錢買的功能在提車后 1-2 年都用不上。供應(yīng)商們必須又快又好保證系統(tǒng)的交付。 誰如果能把這些都做好,不斷構(gòu)筑長板、補(bǔ)齊短板,誰就更有機(jī)會跑出來。 正好借著「輕舟乘風(fēng)」方案的發(fā)布,我們以輕舟智航為藍(lán)本,來看看一家自動駕駛技術(shù)供應(yīng)商要做好 L2+ 系統(tǒng)、城市 NOA,做好前裝量產(chǎn)服務(wù),到底需要具備哪些素質(zhì)。
02
「雙擎」驅(qū)動,「乘風(fēng)」發(fā)布
輕舟智航在過去一年中完成了企業(yè)發(fā)展戰(zhàn)略的調(diào)整,將業(yè)務(wù)從只有 L4 拓展到 L4 以及前裝量產(chǎn)「雙引擎」。

輕舟智航成立于 2019 年,一開始是朝著 L4 級自動駕駛技術(shù)的研發(fā)目標(biāo)前進(jìn)的,其落地的相關(guān)車型主要是無人小巴 Robobus,還包括正在測試并與 T3 出行合作運(yùn)營的 Robotaxi 車隊(duì),一開始也是高舉高打,以此來積累自己的自動駕駛軟硬件算法,構(gòu)造自己的數(shù)據(jù)庫、場景庫、模型庫、打造一整套自動駕駛算法工廠。

2020 年,輕舟智航推出了第一代專注城市復(fù)雜交通場景的自動駕駛解決方案「Driven-by-QCraft」,適應(yīng)于城市公開道路上的多種復(fù)雜路況,并可高效部署于多類車型。 積累了快 3 年之后,當(dāng)這些技術(shù)逐漸成熟,而且通用性、可移植性非常高的時候,輕舟智航?jīng)Q定開拓新的業(yè)務(wù),進(jìn)軍高階自動駕駛系統(tǒng)的前裝量產(chǎn)。 2022 年 5 月,輕舟智航推出了最新一代「Driven-by-QCraft」車規(guī)級前裝量產(chǎn)自動駕駛方案,助力車企實(shí)現(xiàn)城市 NOA 方案的全面落地。這套方案因?yàn)檐浖τ布倪m配能力很強(qiáng),所以從 L2+ 到 L4 自動駕駛都能做。 ?
基本上,輕舟智航走出了一條從 L4 出發(fā)——積累技術(shù)能力(包括感知、PNC 技術(shù)、數(shù)據(jù)驅(qū)動、算法大模型等)——拓展前裝量產(chǎn)業(yè)務(wù)——L4 業(yè)務(wù)和前裝量產(chǎn)業(yè)務(wù)在技術(shù)上互相反哺,并形成自動駕駛開發(fā)的「雙擎」的道路,其目標(biāo)就是把好用的自動駕駛能力賦能給主機(jī)廠并最終讓消費(fèi)者用上這樣的產(chǎn)品。 2022 年 11 月 1 日,輕舟正式將其自動駕駛解決方案「Driven-by-QCraft」命名為「乘風(fēng)」,是一整套軟硬件解決方案,里面適配了像地平線征程 5、英偉達(dá) Orin 這樣的計(jì)算平臺,同時也適配不同數(shù)量的激光雷達(dá)及攝像頭感知硬件組合。這套算法包含了融合感知、預(yù)測規(guī)劃控制、數(shù)據(jù)驅(qū)動以及算法大模型等核心技術(shù)。
「輕舟乘風(fēng)」的到來,讓輕舟智航的企業(yè)定位、市場定位更為清晰:自動駕駛科技公司,做智能汽車的新型 Tier 1。 輕舟智航認(rèn)為,城市 NOA 是輔助駕駛的天花板,也是無人駕駛的入門檻,所以他們當(dāng)下的目標(biāo)是讓更多車主能享受到城市 NOA 帶來的便捷。
03
輕舟智航治好車企的算法焦慮
?算法難題怎么求解?
既然城市 NOA 是輔助駕駛的天花板,那么在技術(shù)難度方面也是天花板。 有多難? 小鵬汽車自動駕駛副總裁吳新宙給過一組數(shù)據(jù)來量化:小鵬的城市 NGP 代碼量是高速 NGP 的 6 倍,感知模型數(shù)量是其 4 倍,預(yù)測/控制/規(guī)劃(PNC 模塊)的代碼量是其 88 倍。從這組數(shù)據(jù)來看,PNC 模塊是自動駕駛進(jìn)城最難的一個部分。 ? 為什么難?
首先就是交通參與者復(fù)雜,大貨車、小客車、三輪車、工程車、市政車、行人、自動車、電動車等等,各種人車混行場景;
其次是交通規(guī)則和行為復(fù)雜,城市道路包含了各地的各類永久性、臨時性紅綠燈,以及環(huán)島、復(fù)雜立交橋等,在市區(qū)還時常有大量行人、自行車、電動車不遵守交通規(guī)則的情況;
還有就是市區(qū)高精地圖覆蓋里程有限,需要大量借助視覺信息來處理各類路口、道路標(biāo)識和車道線以及其他靜態(tài)交通設(shè)施;
從車輛本身來看,傳感器和計(jì)算平臺還需要符合車規(guī)級,由此帶來的成本、功耗限制,需要通過更強(qiáng)的算法框架優(yōu)化和工程化能力來解決。
正因?yàn)檫@些難題存在,有些車企在好幾年前就宣揚(yáng)無人駕駛,結(jié)果到今天還只是能實(shí)現(xiàn)高速導(dǎo)航輔助駕駛,甚至大多數(shù)車型上的自適應(yīng)巡航 ACC、車道保持輔助 LCC 等功能都沒做好;要么就是現(xiàn)在新造車企業(yè)推出的更好用的 L2+ 輔助駕駛功能,但是使用場景受限,大部分自動駕駛只能在 10% 的高速場景使用,一旦進(jìn)入城區(qū),自動駕駛的體驗(yàn)遠(yuǎn)遠(yuǎn)達(dá)不到消費(fèi)者的預(yù)期。而且現(xiàn)在這樣的功能也價(jià)格不菲,基本上很少有人能夠用上。
如特斯拉、小鵬汽車這些佼佼者,F(xiàn)SD Beta 的用戶到現(xiàn)在也就 16 萬人,而小鵬汽車到現(xiàn)在賣了 20 多萬臺車,選裝了 NGP 功能的用戶不會超過 30%。 ? 如今,能真正量產(chǎn)城市 NOA 的車企或者供應(yīng)商少之又少,像小鵬、華為目前也只是在單一城市進(jìn)行試點(diǎn),離大規(guī)模鋪開還相差甚遠(yuǎn)。更別說中國市場上還有這么多的傳統(tǒng)主機(jī)廠,他們未來的車型上要如何擁有好用、用戶愛用的輔助駕駛系統(tǒng)?是現(xiàn)在他們正在焦慮的事情。 我們也應(yīng)該看到好的一面,經(jīng)過這么些年的發(fā)展,傳感器的性能、成本以及計(jì)算平臺的算力、功耗和成本都已經(jīng)到了一個比較好的量產(chǎn)時機(jī),目前看眾多智能電動汽車在硬件上是趨同的,區(qū)別無非是芯片用幾顆、激光雷達(dá)用幾顆、800 萬像素?cái)z像頭用幾顆。
隨著小鵬、蔚來、理想等車企率先把這些硬件套件量產(chǎn)上車,也證明其車規(guī)級驗(yàn)證難題已被征服。 既然硬件沒問題了,那么比拼的重點(diǎn)就落在了軟件上,軟件決定了自動駕駛系統(tǒng)能力的上限,軟件也決定了消費(fèi)者愿不愿意用、愛不愛用這些功能。就算是一堆高性能硬件堆在車上,軟件沒做好,它依然是擺設(shè),好食材還得有懂美食的廚師來烹飪。 作為烹飪城市 NOA 的主廚,輕舟智航也非常清楚的知道自動駕駛軟件算法的重要性,所以在過去幾年,一直在構(gòu)建這方面的能力。
輕舟智航的自動駕駛算法有何玄機(jī)?
在這次的輕舟智航技術(shù)工坊上,他們提出了在自動駕駛算法上的開發(fā)理念:基于數(shù)據(jù)、精于感知、成于 PNC(規(guī)劃控制)。
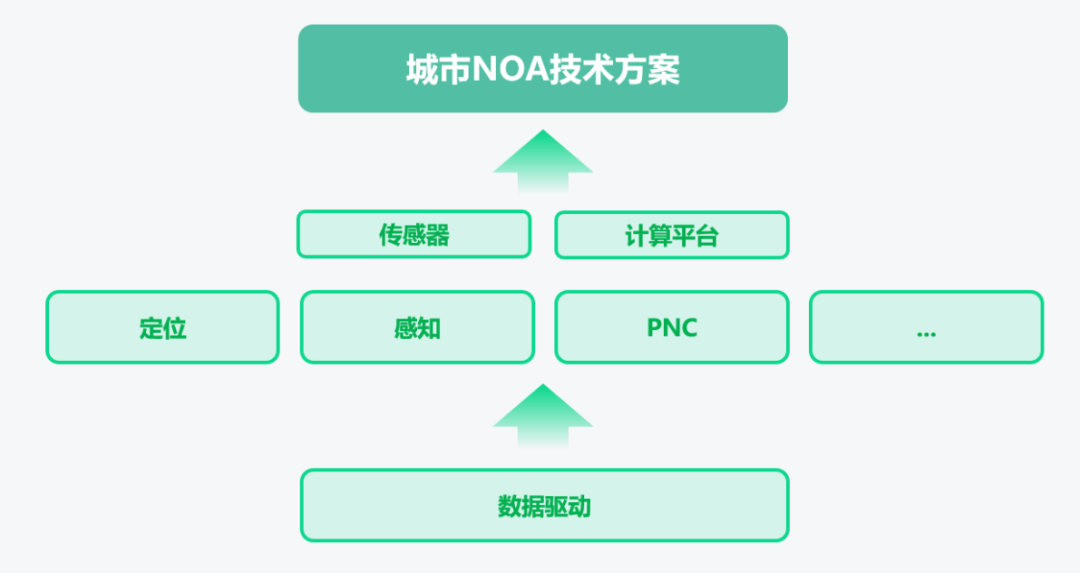
大家知道自動駕駛的主要模塊包括了感知、定位、規(guī)劃、控制。基于此,輕舟這個理念簡單理解就是:
自動駕駛算法的進(jìn)步是強(qiáng)依賴于數(shù)據(jù)量的,需要有大規(guī)模質(zhì)量好的數(shù)據(jù)來喂養(yǎng);
而感知方面需要做的精度非常高,無論是激光雷達(dá)還是視覺,無論是二維還是三維,都需要做到精準(zhǔn)且快速,感知做好了,能力便不會太差;
最終,與用戶體驗(yàn)強(qiáng)相關(guān)的就是 PNC 了,什么時候該變道,什么時候該超車,以什么速度超車,這都依賴于 PNC 技術(shù)能力,這也直接決定功能體驗(yàn)的好和不好,做好 PNC 更是難上加難。
所以基本上,輕舟智航的自動駕駛算法,是圍繞著感知能力、PNC 能力以及大數(shù)據(jù)驅(qū)動這些核心能力來來打造出自己的特色。
(1)融合感知:時序穿插融合以及統(tǒng)一大模型 先從感知技術(shù)來看,目前輕舟走的是融合感知的路線,激光雷達(dá)、攝像頭、毫米波雷達(dá)都配上,同時用高精地圖做定位。輕舟認(rèn)為純視覺很難應(yīng)對中國城市 NOA 的需求,Corner Cases 還是需要激光雷達(dá)來解決。 輕舟這套方案僅用了一顆固態(tài)激光雷達(dá),配合上 11 顆攝像頭以及 5 顆毫米波雷達(dá),這樣一套傳感器組合兼顧性能和成本。
當(dāng)然,如果主機(jī)廠一定要用兩顆激光雷達(dá),輕舟也不會拒絕,畢竟越多系統(tǒng)的冗余就更強(qiáng)。 ? 也許有人會問,一顆激光雷達(dá)如何應(yīng)對盲區(qū)?和小鵬汽車現(xiàn)在采用兩顆以及其他企業(yè)采用的 3 顆、4 顆方案比會不會依然有缺陷? 輕舟智航已經(jīng)在技術(shù)上解決了這個問題。 一顆激光雷達(dá)肯定是用于前向,目前已知視場角是 120 度,這個性能和輕舟智航的「時序和空間融合算法」相配合,在車輛行駛的過程中,前向激光雷達(dá)掃過的區(qū)域會在系統(tǒng)時刻進(jìn)行記憶,并在車往前行進(jìn)后將記憶區(qū)域的點(diǎn)云數(shù)據(jù),與側(cè)向后向的純視覺信息進(jìn)行補(bǔ)充和融合,從而保證對前后向區(qū)域的充分認(rèn)知。
而針對車輛后向的感知,一般是出現(xiàn)在倒車場景,但是倒車場景憑借雷達(dá)和攝像頭就可以很好的實(shí)現(xiàn)相關(guān)功能,也不太需要再配一顆激光雷達(dá)。 這里面,輕舟有一個核心的技術(shù)起了大作用,那就是「時序和空間融合算法」。 在重點(diǎn)介紹「時序和空間融合算法」之前,我們來看看業(yè)內(nèi)其他玩家都是怎么做的。
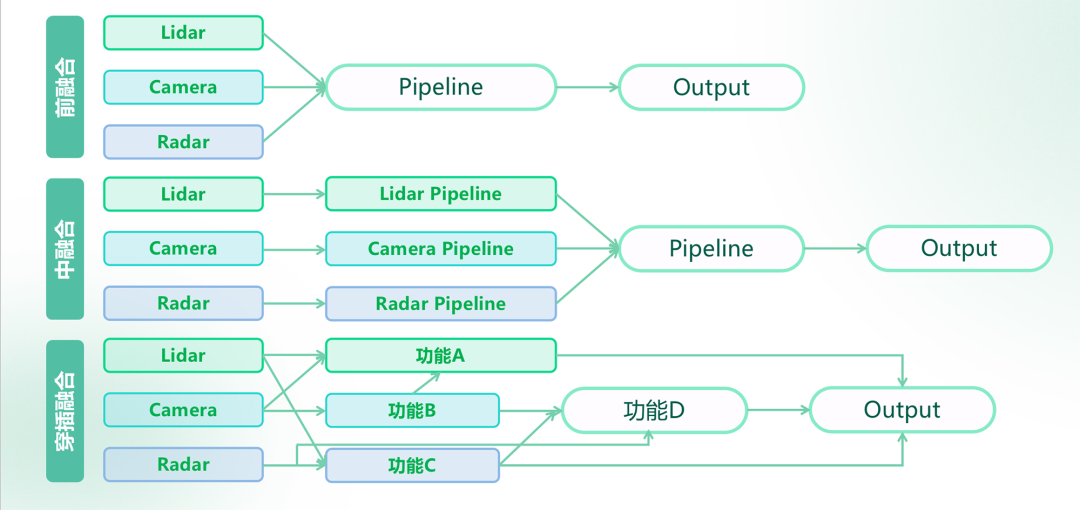
主流的融合方案包括前融合(數(shù)據(jù)級融合)、中融合(特征級融合)和后融合(目標(biāo)級融合)三種。 不同融合方案各有優(yōu)劣,有效的融合結(jié)果才能給下游任務(wù)輸出可靠的信息,為車輛做出安全的預(yù)測和決策提供保障。
前融合可以實(shí)現(xiàn)更高質(zhì)量的融合效果,但對于不同傳感器的時間同步性和空間標(biāo)定的要求非常苛刻;
后融合的解耦性更強(qiáng),但依賴經(jīng)驗(yàn)豐富、工程素養(yǎng)良好的工程人員編寫基于經(jīng)驗(yàn)的規(guī)則,同時需要大量的仿真、實(shí)車測試以獲得更廣的覆蓋度,并且可擴(kuò)展性有限,工程投入邊界收益低。
業(yè)內(nèi)有像飛凡汽車在前段時間提出了所謂「全融合感知」,但實(shí)際上只是包括了「前融合」和「后融合」兩步,「中融合」是沒有做的,所以還不能稱之為真正意義上的「全融合」。 而輕舟智航的全融合感知算法則包括了「前、中、后融合」,而且在時間順序上是穿插進(jìn)行的,通過激光雷達(dá)、毫米波雷達(dá)、視覺等多傳感器融合,感知模型可在不同階段充分利用不同傳感器信息,讓不同傳感器優(yōu)勢互補(bǔ)(也就是多模態(tài)感知信息),可以避免單模信息丟失,實(shí)現(xiàn)更早的多傳感器信息共享,得到更優(yōu)傳感器融合結(jié)果,避免各類誤檢和漏檢,精度高且魯棒性強(qiáng)。 這里頭最重要的一點(diǎn)就是加入了「中融合」,也就是特征級融合。為什么輕舟智航能做這一步,是因?yàn)殡S著 BEV(Bird's Eye View,一種多傳感器融合框架)技術(shù)的迭代,他們發(fā)現(xiàn)在特征層面上對激光雷達(dá)點(diǎn)云和視覺圖像做特征融合變得更為現(xiàn)實(shí),輕舟就應(yīng)用了這個技術(shù),來實(shí)現(xiàn)一個更好的融合結(jié)果。
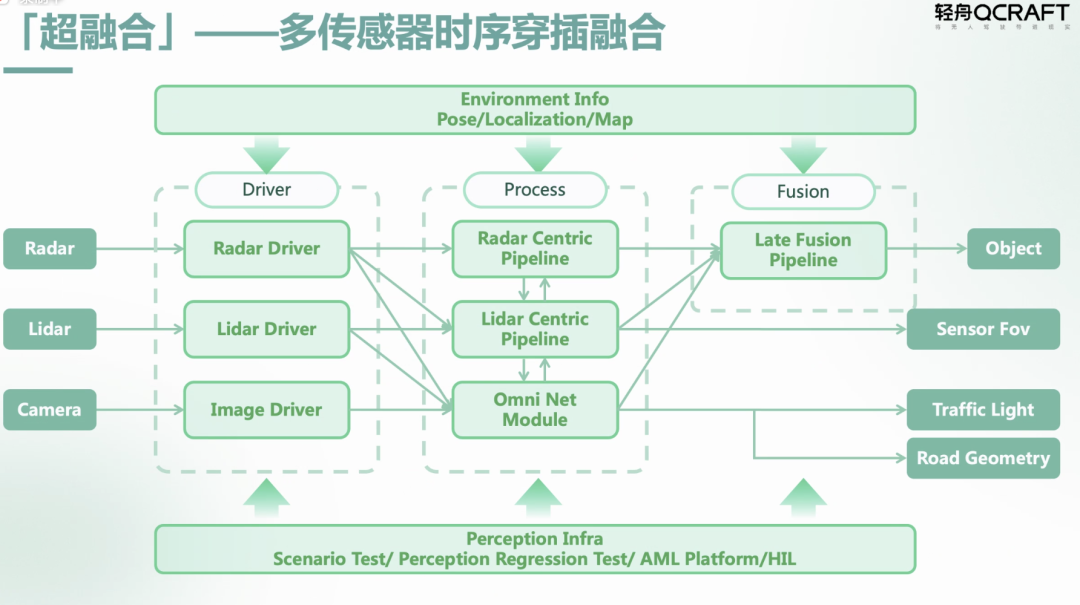
此外在「時序融合」方面,輕舟肯定不只靠單幀的結(jié)果來做感知,以前是通過一些傳統(tǒng)的跟蹤技術(shù),實(shí)現(xiàn)了對時序的一個利用,但這種利用本身也是有很大的信息損失,通過時序的融合,輕舟可以充分利用時序中的信息,來達(dá)成更好的最終感知效果。 為了配合「前中后穿插融合」感知算法,輕舟智航還打造了自己的神經(jīng)網(wǎng)絡(luò)大模型 OmniNet,這個網(wǎng)絡(luò)模型和特斯拉的 HydraNet 以及小鵬汽車的 XNet 是一類東西,不過 OmniNet 最獨(dú)特的地方就是引入了激光雷達(dá)感知信息的融合(HydraNet 和 XNet 是純視覺融合模型),且獨(dú)家支持「時序融合」。
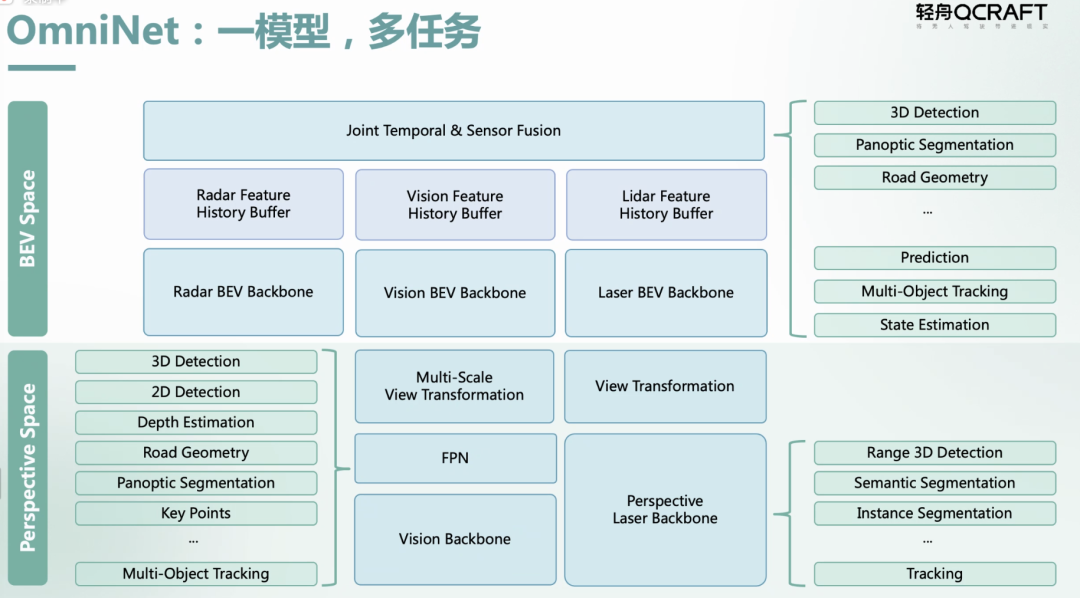
? OmniNet 將視覺、毫米波雷達(dá)、激光雷達(dá)等數(shù)據(jù)通過前融合和 BEV 空間特征融合,讓本來獨(dú)立的各個計(jì)算任務(wù)通過共享主干網(wǎng)絡(luò)(backbone)和記憶網(wǎng)絡(luò)(memory network)進(jìn)行高效多任務(wù)統(tǒng)一計(jì)算,最終同時在圖像空間和 BEV 空間中輸出不同感知任務(wù)的結(jié)果,為下游的預(yù)測和規(guī)劃控制模塊提供更豐富的輸出。 而且,OmniNet 也是可以部署在量產(chǎn)計(jì)算平臺上的,因?yàn)橄噍^傳統(tǒng)方案,OmniNet 在實(shí)際應(yīng)用中可節(jié)省 2/3 的算力資源。 怎么做到的呢?統(tǒng)一的時序多模態(tài)特征融合的大模型,讓各模型的主干網(wǎng)絡(luò)部分可以共用,避免了大量重復(fù)計(jì)算,也無需再對不同任務(wù)開發(fā)不同的網(wǎng)絡(luò)模型。 正因此,輕舟的感知方案可以靈活適配不同車型的傳感器配置,而無需針對不同的硬件配置進(jìn)行單獨(dú)的模型訓(xùn)練,帶來了更低的遷移成本。這也就是前文所提到的「輕舟乘風(fēng)」可以支持不同傳感器方案,支持 L2+ 到 L4 自動駕駛的不同能力。
總結(jié)起來就是:OmniNet 讓融合感知的效率更高、效果更好(特別是能夠準(zhǔn)確且穩(wěn)定地識別超長車輛、異形車輛、跨相機(jī)截?cái)辔矬w等)、且能夠適配不同的傳感器方案、也不占用太多算力資源,很適合在車端部署。
引入了大模型 OmniNet 之后,也非常利于輕舟智航采用數(shù)據(jù)驅(qū)動的算法開發(fā)模式,通過數(shù)據(jù)閉環(huán)實(shí)現(xiàn)算法的高效迭代,能減少模型維護(hù)成本,同時效果也更加可靠,對于解決一些自動駕駛的長尾問題非常高效。 傳統(tǒng)的開發(fā)模式是它教給你什么,你就學(xué)到了什么,而 OmniNet 支持的這種數(shù)據(jù)驅(qū)動的模式,其實(shí)就是讓系統(tǒng)擁有了自學(xué)和自我成長的能力,無論以后遇到什么交通場景,車輛都可以辨別和應(yīng)對。 多傳感器時序穿插融合算法,配合上統(tǒng)一的神經(jīng)網(wǎng)絡(luò)大模型 OmniNet,讓輕舟智航的感知融合技術(shù)在業(yè)內(nèi)還是非常有獨(dú)特性的,而且整體的感知效果也足夠出色。
這樣一套感知體系,在應(yīng)對城市 NOA 的場景挑戰(zhàn)時,肯定是不怵的,從目前輕舟釋放出的測試車的測試視頻來看,完全可以應(yīng)對各種復(fù)雜甚至是極端場景的感知需求。 講完感知,我們再來看更難搞定的 PNC(規(guī)劃和控制)模塊。 (2)城市 NOA 的 PNC 模塊代碼量是高速 NOA 的數(shù)十倍 提到 PNC(全稱 Planning and Control),大家都知道是規(guī)劃和控制,但其中還有更多內(nèi)涵。 輕舟智航的 PNC 模塊包含了車端核心模塊和支持模塊:
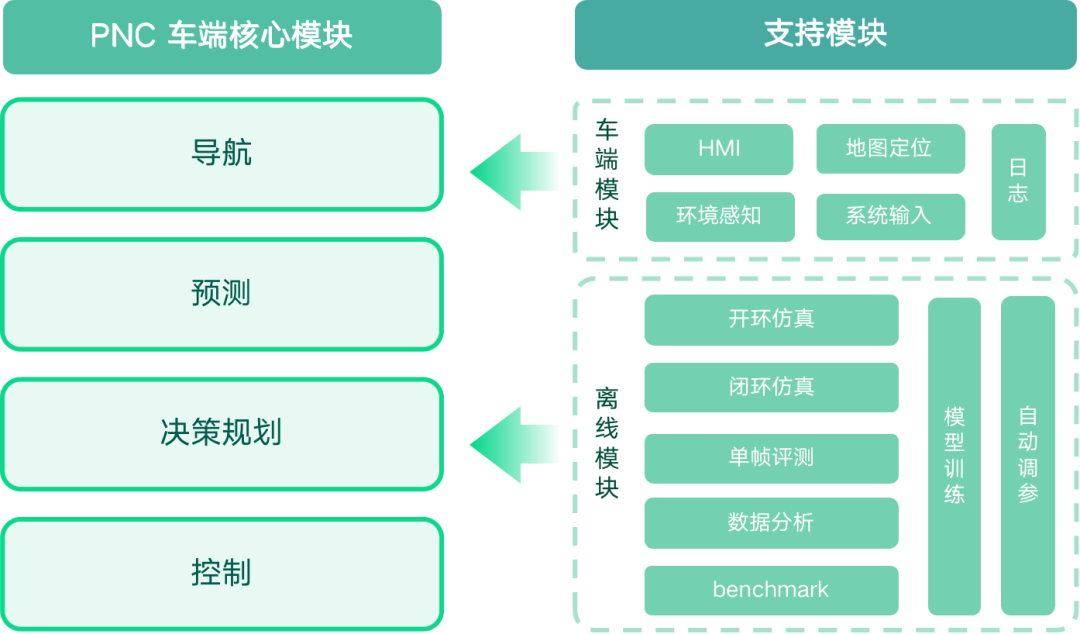
車端核心模塊包括導(dǎo)航、預(yù)測、決策、規(guī)劃、控制;
車端支持模塊包括 HMI(人機(jī)交互)、環(huán)境感知、地圖定位等;
PNC 的離線模塊可以收集、查詢、測試數(shù)據(jù),訓(xùn)練模型,通過仿真分析模型和算法效果,最后再將模型和算法效果反哺給車端模塊。
PNC 中的「規(guī)劃」其實(shí)就是自動駕系統(tǒng)會幫車輛規(guī)劃出一條行進(jìn)軌跡,到底是直行,還是轉(zhuǎn)彎,或者是超車、繞行,這里就涉及到車輛方向盤的調(diào)整和速度的調(diào)整,也就是 PNC 中的「控制」。 車輛橫縱向控制和速度的控制直接影響到車?yán)锩娉俗叩母惺埽哉f PNC 也是決定用戶體驗(yàn)的重要模塊。 當(dāng)然了,大家也都關(guān)心通行效率的問題,畢竟人開車遇到前面車開得慢肯定會超車,那自動駕駛狀態(tài)下會不會及時超越慢車,其實(shí)也和 PNC 強(qiáng)相關(guān),所以這個模塊做得好不好也會影響車輛的通行效率。
安全、上好的乘坐體感以及不低的通行效率,其實(shí)就是 PNC 模塊要追求的高境界。特別是城市 NOA 要面對復(fù)雜城市交通環(huán)境,車多人多交通行為復(fù)雜,PNC 模塊就很難做,做好了那就非常有競爭力。 在 PNC 這塊,輕舟智航應(yīng)該算得上是業(yè)內(nèi)首家采用了「時空聯(lián)合規(guī)劃」算法的方案商。 什么是「時空聯(lián)合規(guī)劃」?
簡單理解就是系統(tǒng)同時考慮空間和時間來規(guī)劃車輛軌跡,而不是先單獨(dú)求解路徑,在路徑基礎(chǔ)上再求解速度從而形成軌跡。將「橫縱分離」,升級為「橫縱聯(lián)合」,能直接在x-y-t(即平面和時間)三個維度的空間中直接求解最優(yōu)軌跡。 人類司機(jī)其實(shí)每天都在用「時空聯(lián)合規(guī)劃」,比如說加速超車,就是在變道的過程中帶點(diǎn)油門,絲滑完成超車。輕舟智航的這套算法正是為了更像人開車、絲滑應(yīng)對各類交通場景而打造的。 在最為典型的「鬼探頭」場景,「時空聯(lián)合規(guī)劃」讓自動駕駛車輛不拘泥于固定的路徑,可以實(shí)時計(jì)算出來一個最佳的避讓軌跡,更好地保證安全性。
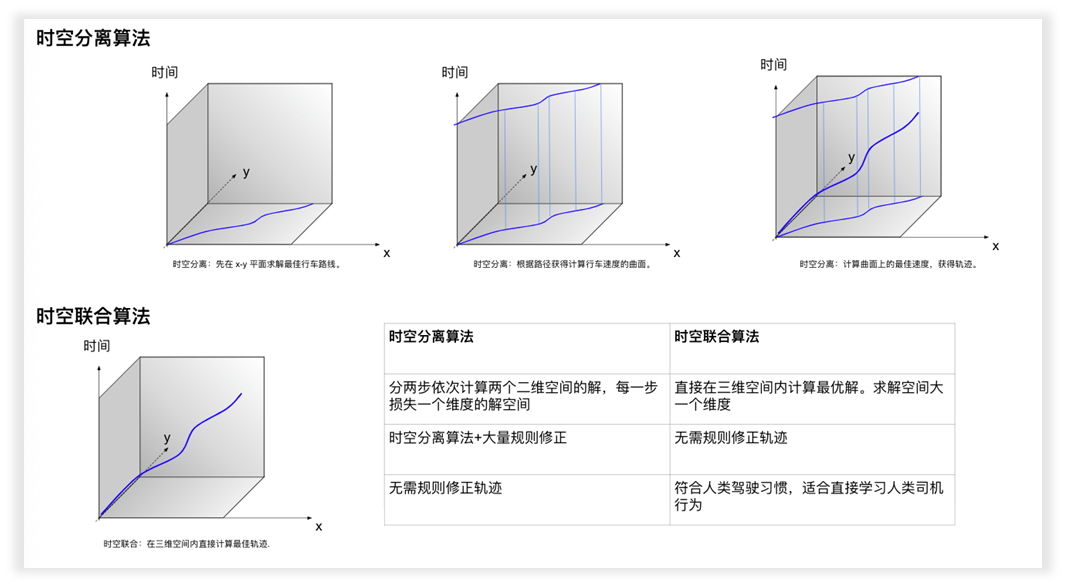
和「時空聯(lián)合規(guī)劃」相對的就是「時空分離規(guī)劃」,這也是目前業(yè)內(nèi)比較常用的 PNC 策略。這個策略把「軌跡規(guī)劃」拆分成兩個子問題,即路徑規(guī)劃(path planning)和速度規(guī)劃(speed planning)。路徑規(guī)劃對應(yīng)于橫向控制,即方向盤;速度規(guī)劃對應(yīng)于縱向控制,即剎車或油門,這種決策機(jī)制也就是通常所謂的「橫縱分離」。 這種方式非常依賴手寫規(guī)則來調(diào)整車輛行為,也非常依賴大量路測來驗(yàn)證算法,所以有一些先天的缺陷。
輕舟智航 CTO 侯聰這樣評價(jià)「時空分離規(guī)劃」:「在時空分離算法中,可以通過增加對本車未來速度的規(guī)則性的預(yù)估彌補(bǔ)路徑計(jì)算中的不足。但這種預(yù)估理論上是存在缺陷的,因?yàn)轭A(yù)估的時候,本車最優(yōu)的速度還沒有規(guī)劃出來。」 輕舟選擇「時空聯(lián)合規(guī)劃」也不是拍腦袋決定的,在公司創(chuàng)立之初,他們就去中國的幾個一線城市進(jìn)行了考察,發(fā)現(xiàn)在中國城市的道路環(huán)境過分復(fù)雜,考慮到長遠(yuǎn)的發(fā)展,所以決定不用業(yè)內(nèi)主流的「時空分離規(guī)劃」,而是走一條更難但更適合的路。
「時空聯(lián)合規(guī)劃」的難點(diǎn)在于,這個算法的計(jì)算量很大,而且參數(shù)眾多,實(shí)現(xiàn)起來以及后續(xù)的優(yōu)化難度巨大,輕舟為此投了大量的研發(fā)資源來打磨這個算法。 為了應(yīng)對該算法對計(jì)算性能要求高的難題,輕舟的 PNC 策略是當(dāng)算力足夠的時候,會計(jì)算出較多軌跡,選取最優(yōu)軌跡,充分利用多核做并行計(jì)算;算力有限的情況下,生成的軌跡會相應(yīng)減少,但也能保證行車安全、穩(wěn)定。
當(dāng)然,理論的歸理論,具體實(shí)車表現(xiàn)如何還需親身體驗(yàn)來驗(yàn)證,筆者此前已經(jīng)體驗(yàn)過輕舟 Robotaxi 的早期測試車,在繞行路邊車輛的操作方面確實(shí)有很好的體感。 在 PNC 之前,還有一個比較重要的模塊是預(yù)測,系統(tǒng)需要預(yù)測交通其他參與者的行進(jìn)意圖,才能更好的進(jìn)行軌跡規(guī)劃和控制。 輕舟也自研了預(yù)測模型 Prophnet,在一些國際比賽里成績也是名列前茅。
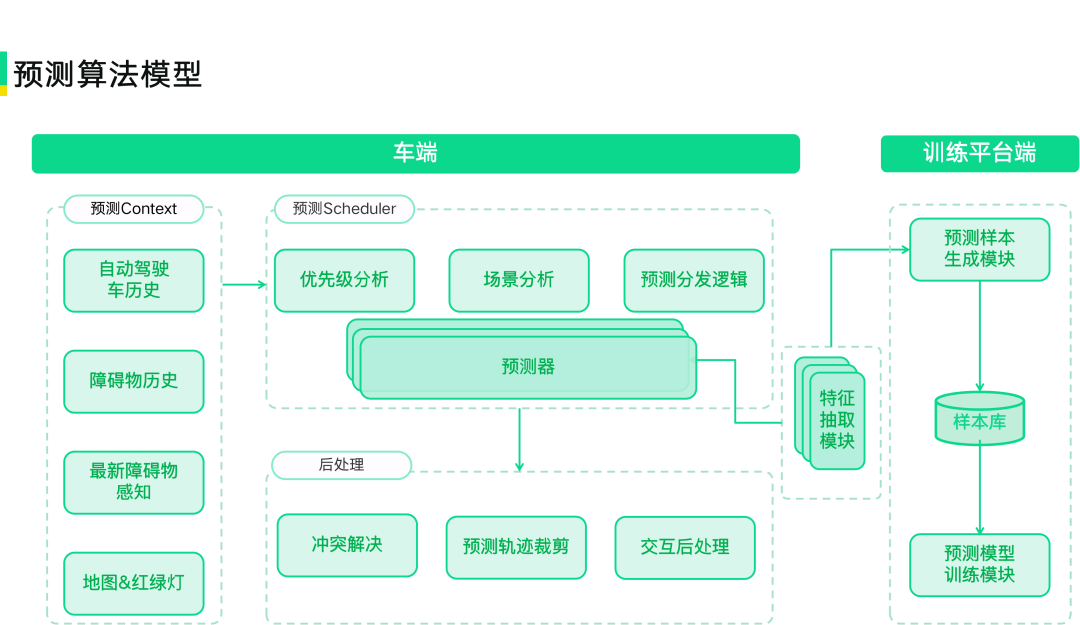
具體用幾個數(shù)字指標(biāo)來看看輕舟的預(yù)測做得如何:
輕舟智航能提供 10 秒長時的意圖加軌跡預(yù)測,主模型預(yù)測有至少三條帶概率的軌跡,同時最大概率軌跡和真值的平均誤差是 3.73 米。總之就是預(yù)測很精準(zhǔn)。
主模型可同時支持預(yù)測 256 個目標(biāo),推理整體耗時小于 20 毫秒,可以滿足實(shí)時運(yùn)算的需求。
模型支持地平線征程 5 和英偉達(dá) Orin 雙平臺。輕舟的預(yù)測模型算子也是國內(nèi)首家適配征程 5 BPU 的。
一整套的預(yù)測+ PNC 的算法,讓輕舟智航的自動駕駛車輛能夠很好的應(yīng)對中國的城市 NOA 功能需求。 (3)數(shù)據(jù)不僅驅(qū)動感知算法,也驅(qū)動 PNC 算法 大家都知道優(yōu)質(zhì)的數(shù)據(jù)對于自動駕駛系統(tǒng)的研發(fā)和優(yōu)化來說非常重要,「數(shù)據(jù)就是石油」。 大量的數(shù)據(jù)喂給系統(tǒng),讓它不斷豐富自己的「學(xué)識」,以往不認(rèn)識的東西,現(xiàn)在認(rèn)識了,這更多的指的是感知層面。毋庸置疑大數(shù)據(jù)對于自動駕駛感知提升非常顯著。 而在 PNC 模塊,大數(shù)據(jù)也非常重要,因?yàn)閺摹感率炙緳C(jī)」變成「老司機(jī)」,也很需要大數(shù)據(jù)的喂養(yǎng)。 任何一家自動駕駛公司都有一套數(shù)據(jù)采集、存儲、清洗篩選、標(biāo)注、仿真訓(xùn)練的體系,輕舟智航也不例外,而且還做得很深入。
過去幾年,輕舟建立起了「駕駛數(shù)據(jù)倉庫」,可自動化地對實(shí)際駕駛數(shù)據(jù)和「影子模式」(在人類司機(jī)駕駛時,軟件會以「影子模式」 在后臺運(yùn)行)下的人工駕駛數(shù)據(jù)打上標(biāo)簽。這些標(biāo)簽非常豐富,數(shù)量多達(dá)成百上千個,包括道路信息(道路級別、種類、車道類別等)、坐標(biāo)環(huán)境信息(周圍障礙物、車流密度、行人、其他車輛是否 cut-in 等)、自車信息(自車的速度、位置)、從影子模式中獲得的人類司機(jī)的開車數(shù)據(jù),由此就可以得知人類司機(jī)在哪個時間點(diǎn)剎車變道、什么時候打了轉(zhuǎn)向燈,這對于提升算法能力非常寶貴。 舉個例子,比如有一天輕舟的一輛自動駕駛測試車在碰到一輛大車 cut-in 的時候,沒有很好的應(yīng)對,那輕舟就可以調(diào)用數(shù)據(jù)倉庫里所有類似的場景,做成場景庫進(jìn)行仿真測試。
通過仿真測試即可驗(yàn)證算法當(dāng)前存在的問題。在修改算法或者重新訓(xùn)練模型之后,如果模型效果表現(xiàn)得好,則可以把結(jié)果用在車上;讓車開得更好,從而完成了一個數(shù)據(jù)閉環(huán)。 這就是數(shù)據(jù)驅(qū)動在 PNC 模塊應(yīng)用的一個典型例子。 那輕舟的數(shù)據(jù)從哪里來? 目前主要是自己采集。這里不得不提到輕舟的 L4 級 Robotaxi 業(yè)務(wù)。 ? 目前,輕舟智航已經(jīng)在全國 10 座城市公開道路常態(tài)化運(yùn)營,包括蘇州、深圳、武漢等等,常態(tài)化運(yùn)營的小巴車輛超過 100 臺,這些車輛的運(yùn)營為輕舟積累了豐富的行車數(shù)據(jù)。
截止 2021 年年底,輕舟智航已經(jīng)測試了百萬公里的城區(qū)道路,有大量的L4級別的激光雷達(dá)、攝像頭和毫米波雷達(dá)等傳感器數(shù)據(jù),以及長期積累的司機(jī)駕駛行為數(shù)據(jù)積累,這些數(shù)據(jù)規(guī)模還將持續(xù)擴(kuò)大。 等到「輕舟乘風(fēng)」真正量產(chǎn)上車之后,輕舟智航又多了一個數(shù)據(jù)來源,就像特斯拉、小鵬汽車、Mobileye 這些公司一樣,有大規(guī)模的量產(chǎn)車在路上收集實(shí)際行駛數(shù)據(jù)。
3、量產(chǎn)向小鵬看齊,路線上殊途同歸
在城市 NOA 這條路上,毋庸置疑現(xiàn)在小鵬汽車是走得最快且效果最好的一家企業(yè)之一,輕舟現(xiàn)在要在城市 NOA 領(lǐng)域展開角逐,無疑就是要和小鵬的城市 NGP 斗一斗法,畢竟要比就和最好的比。 實(shí)際上,輕舟和小鵬在開發(fā)自動駕駛技術(shù)和功能的戰(zhàn)略規(guī)劃上,已經(jīng)是殊途同歸、戰(zhàn)略合流了:
輕舟從 L4 Robobus、Robotaxi 出發(fā),走到現(xiàn)在以「輕舟乘風(fēng)」為重要業(yè)務(wù),要為車企打造城市 NOA。
小鵬汽車從基礎(chǔ)的輔助駕駛開始做起:G3 上的自動泊車;P7 上的 XPilot、高速 NGP、記憶泊車;P5 上的雙激光雷達(dá)/城市 NGP,現(xiàn)在也計(jì)劃推出自己的 Robotaxi。
小鵬希望為自家的車型產(chǎn)品配備好用的城市 NOA,輕舟智航希望為更多主機(jī)廠的車型產(chǎn)品配備好用的城市 NOA。他們一家是主機(jī)廠,一家是供應(yīng)商,最終的目標(biāo)都是實(shí)現(xiàn)無人駕駛的遠(yuǎn)景。 從整個產(chǎn)業(yè)來看,小鵬的自動駕駛開發(fā)只能成就小鵬,而輕舟智航的自動駕駛開發(fā)可以成就任何主機(jī)廠,省得主機(jī)廠再重復(fù)造輪子。 未來輕舟智航要在前裝量產(chǎn)中證明自己的技術(shù)實(shí)力,賦能更多的主機(jī)廠,讓這些主機(jī)廠的車型產(chǎn)品也有非常好用的自動駕駛功能,至少在輔助駕駛這個領(lǐng)域,可以和特斯拉、小鵬這樣的領(lǐng)先選手掰掰手腕。 「輕舟乘風(fēng)」應(yīng)該是解決車企智能駕駛焦慮的一劑良藥。
04
助力主機(jī)廠智能駕駛突圍
為主機(jī)廠提供量產(chǎn)自動駕駛方案這個戰(zhàn)略規(guī)劃無疑是正確且有錢景的,畢竟 Mobileye、Momenta 珠玉在前。 但要當(dāng)好自動駕駛技術(shù)供應(yīng)商,是綜合能力的考量。 這里面有三個重要的點(diǎn)。
1、其一是技術(shù)過硬:除了在感知、規(guī)控以及數(shù)據(jù)驅(qū)動方面的硬實(shí)力,還要有軟實(shí)力,軟實(shí)力這一部分包括生態(tài)伙伴的構(gòu)建。 輕舟已經(jīng)積累了一批智能汽車上下游合作伙伴,包括計(jì)算平臺領(lǐng)域的英偉達(dá)、地平線;激光雷達(dá)領(lǐng)域的禾賽、速騰聚創(chuàng);軟件領(lǐng)域的的阿里云、亞馬遜云服務(wù)、火山引擎;主機(jī)廠方面的東風(fēng)、金龍等。 ? 據(jù)輕舟透露,其「乘風(fēng)」方案已經(jīng)有意向合作車企。且據(jù)知情人士透露,輕舟的仿真技術(shù)模塊已經(jīng)被國內(nèi)的造車新勢力采用。
2、其二是高效開發(fā):一套可擴(kuò)展的自動駕駛算法體系;豐富的開發(fā)工具鏈;得力的開發(fā)支持;低配、中配、高配的快速適配。 前文我們已經(jīng)多次提到「輕舟乘風(fēng)」方案的可擴(kuò)展性,算法模型可以無縫支持不同配置的傳感器套件方案,在不同的車型上進(jìn)行高效率遷移。無論主機(jī)廠需要 1 顆激光雷達(dá),還是 2、3、4 顆激光雷達(dá),都可以支持開發(fā)。 工具鏈方面,輕舟有數(shù)據(jù)工具鏈產(chǎn)品「輕舟矩陣」,這些數(shù)據(jù)鏈工具包括用于傳感器數(shù)據(jù)采集、傳輸、管理與挖掘的數(shù)據(jù)平臺;大規(guī)模的自動化標(biāo)注產(chǎn)生真值的標(biāo)注平臺;高效的模型訓(xùn)練和評估的機(jī)器學(xué)習(xí)訓(xùn)練平臺;大規(guī)模的回灌測試仿真平臺;硬件在環(huán)測試平臺。可以非常好的支持量產(chǎn)自動駕駛系統(tǒng)的迭代升級,大規(guī)模的 OTA 不再是問題。 可能目前一個小短板就是對于主機(jī)廠的開發(fā)支持了,畢竟早期還是需要比較大規(guī)模的人力投入的,以華為 ADS 在阿維塔 11 項(xiàng)目上的千人團(tuán)隊(duì)來看,這對于創(chuàng)業(yè)公司輕舟來說壓力還是比較大的。另外在工程化能力上,輕舟的團(tuán)隊(duì)還是有所欠缺的,畢竟現(xiàn)在都是算法人才,不過輕舟已經(jīng)在補(bǔ)強(qiáng)這塊的短板。
3、其三是成本可控:這里的成本體現(xiàn)在研發(fā)成本和方案本身的成本上。 研發(fā)成本方面,車企自研自動駕駛系統(tǒng)需要付出很大的代價(jià),包括資本、時間等等。那么輕舟作為一家供應(yīng)商,可快速幫助主機(jī)廠構(gòu)筑這樣的能力,規(guī)避了主機(jī)廠自己組建團(tuán)隊(duì)投入資本最后做出來的產(chǎn)品達(dá)不到預(yù)期的風(fēng)險(xiǎn),這也是輕舟這樣的自動駕駛科技公司最大的行業(yè)價(jià)值。 在方案本身的成本方面,目前輕舟的城市 NOA 采用的是單激光雷達(dá)方案,成本也是非常可控的,而且未來下探的空間也足夠。 如果把這三點(diǎn)都做好,補(bǔ)齊其中某些短板,那么以輕舟為代表的新型供應(yīng)商未來還是大有可為的。 ? 行業(yè)內(nèi),Robotaxi 公司都在轉(zhuǎn)型做量產(chǎn),東方不亮西方亮,轉(zhuǎn)型決心更強(qiáng)的公司,可能在未來會有更強(qiáng)的競爭力。 主機(jī)廠也需要輕舟智航這樣的供應(yīng)商,化解智能化、智能駕駛的焦慮,以免走入「諾基亞時刻」。
編輯:黃飛
?
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論