 電子發(fā)燒友App
電子發(fā)燒友App


汽車“四化”發(fā)展方向是汽車工業(yè)未來的發(fā)展趨勢,其中包含自動駕駛、網(wǎng)聯(lián)化、動力系統(tǒng)電氣化和共享移動化。隨著智能駕駛技術(shù)對于整車智能化程度要求的不斷提升,對其整車的控制能力要求也大幅提升,這一過程推動整車電子電器架構(gòu)逐漸從分布式架構(gòu)向集中式專用域控制器架構(gòu)進行不斷演進和發(fā)展,以便提供更加高速、安全、可靠的電子架構(gòu)。這一過程中,不僅要求智能駕駛功能能夠運行在具有高性能軟件到硬件集成的專用中央域控制器上,同時也要求整車控制這塊也需要運行于穩(wěn)定性、可靠性極高的中央與控制器上,這樣的中央域控制器不僅需要充當對于整個車身控制的終端,也需要執(zhí)行包含中央網(wǎng)關(guān)、動力、底盤等各域的綜合控制系統(tǒng)端。這也是實現(xiàn)后續(xù)作為面向服務(wù)開發(fā)的前置條件。
本文將針對整車中央域控單元VDC從硬件、軟件設(shè)計兩個方面進行詳細的方案設(shè)計介紹,以方便對整體控制能力進行詳述。
1.整車域控硬件設(shè)計方案介紹
整車域控VDC的設(shè)計包含整機設(shè)計,具體硬件方案,視頻輸入/輸出,通信鏈路、供電終端、存儲終端。
1、硬件總體設(shè)計
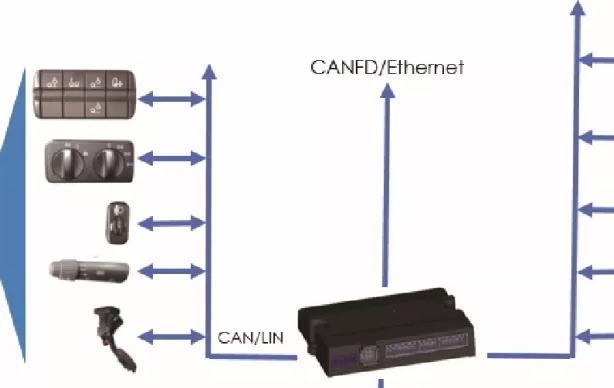
從整個整車域控設(shè)計思路上講,需要考慮MCU和MPU在整車域控中需要達到一定的功能安全等級前提下,滿足對整車域控的控制能力輸出。此外,設(shè)置通用接口GPIO用于對整車其他域控的輸出指令控制(如油門開度、制動開關(guān)、輸入喚醒、輸出喚醒等)。設(shè)置CAN、ETH、LIN接口用于通信連接分別傳輸不同的數(shù)據(jù)類型;設(shè)置基礎(chǔ)時鐘晶振用于上下電時鐘同步;設(shè)置雙路供電電源用于考慮整車域控整體不會因為供電故障導致的失效。
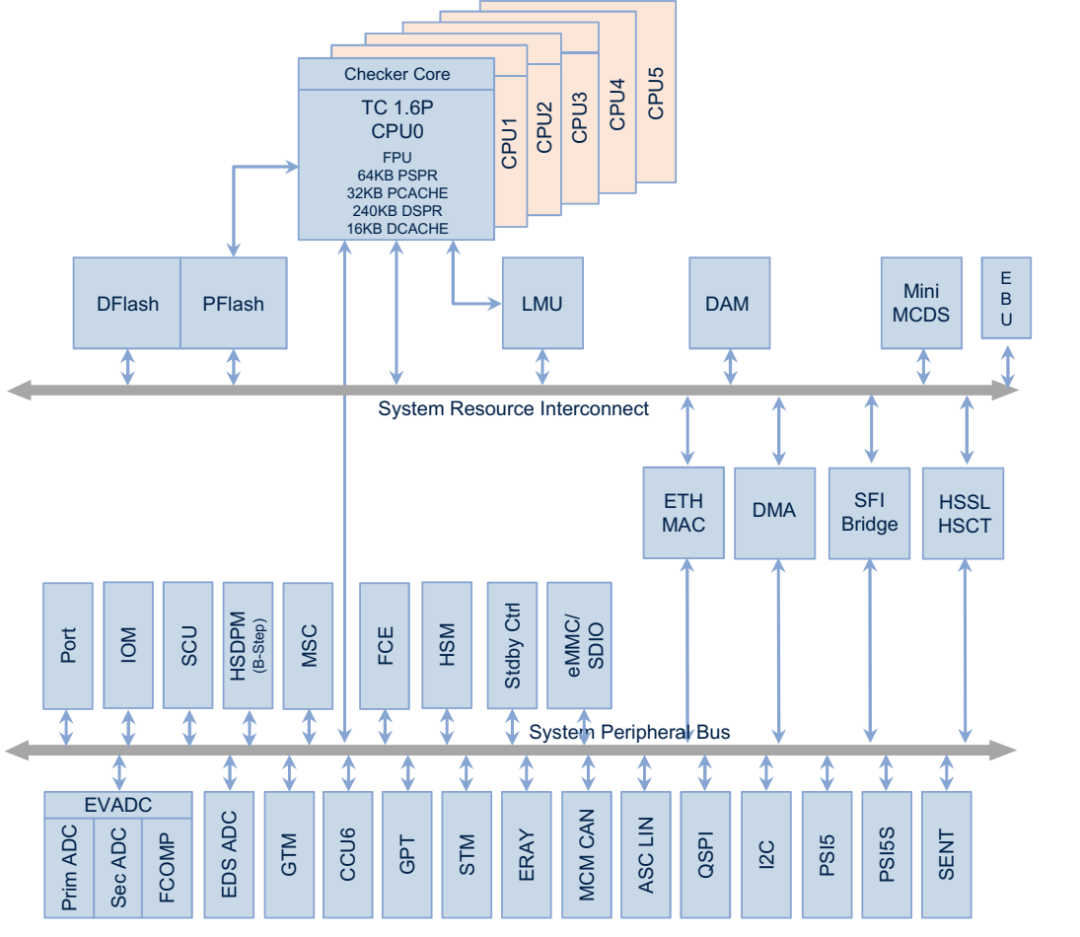
從上圖可以看出,整車域控從功能角度上講就是一個多維度的準集中式中央處理單元,不僅需要執(zhí)行包含低階行泊車控制功能,還需要執(zhí)行對整個底盤系統(tǒng)的整體控制,同時也需要承擔中央網(wǎng)關(guān)的通信路由轉(zhuǎn)發(fā)等功能。因此,在設(shè)計過程各種需要將各種不同功能性能的芯片能力充分調(diào)動起來,比如考慮實現(xiàn)低階行泊一體控制能力,可以采用雙TDA4VM或雙J3這類中度算力芯片進行搭載。而考慮到實現(xiàn)中央網(wǎng)關(guān)功能,則可以考慮利用常見的網(wǎng)關(guān)芯片DRA821等。同時為了從終端控制上增強其功能安全特性,也可以在執(zhí)行對整車控制輸出端口,加入典型的高安全等級MCU芯片,如英飛凌的TC397或華為的麒麟系列。
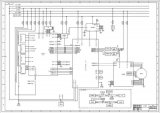
高配版本的VDC需要考慮一部分功能為智駕功能預留。因此整車域控的設(shè)計過程將比傳統(tǒng)的簡單ECU復雜許多。典型的硬件端口設(shè)計思路參照如下圖所示。
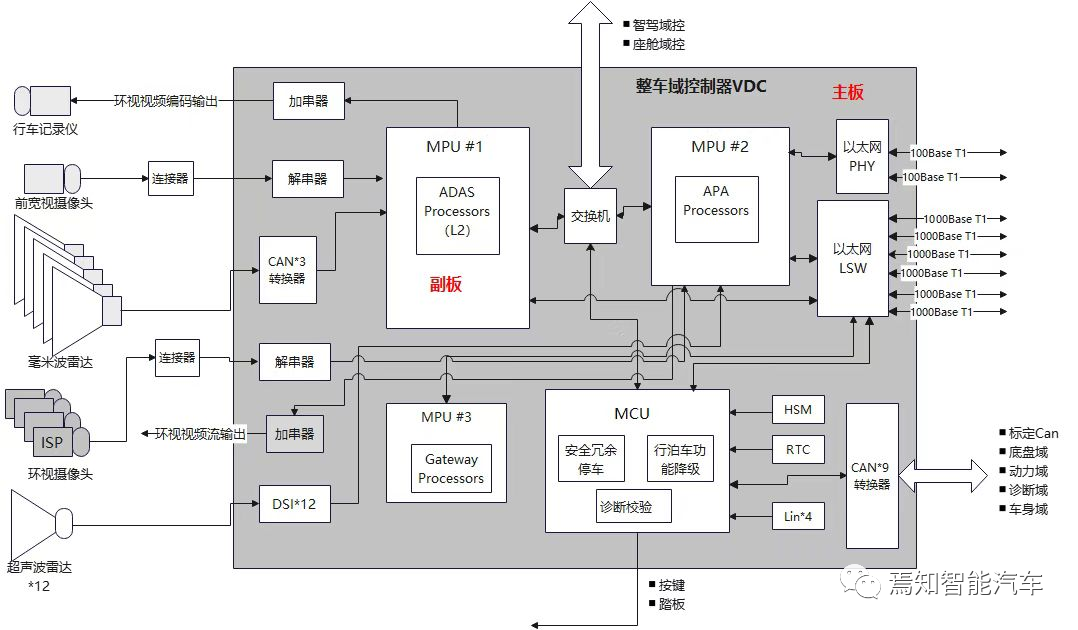
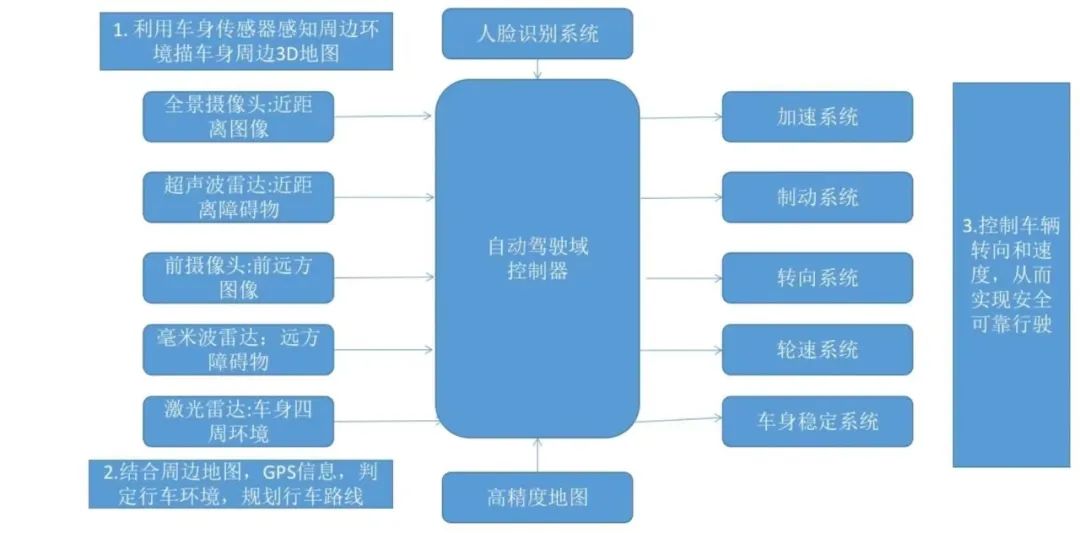
從配置整車智駕系統(tǒng)的角度出發(fā),整車域控考慮了在一些關(guān)鍵設(shè)計環(huán)節(jié)上考慮對智駕域控做協(xié)同控制。一些主機廠的方案是將智駕系統(tǒng)的冗余控制放到整車域控端,比如設(shè)計將算力要求不高的單獨前視攝像頭接入整車域控VDC;同時也將只存在邏輯算力的毫米波雷達,超聲波雷達數(shù)據(jù)通過CANFD協(xié)議連接至整車域控端。這里主要可以起到兩方面的作用:
其一,是省功耗的運行低版本ADAS系統(tǒng),比如在長續(xù)航模式或跛行回家這類整車運行狀態(tài)下,還可以基本保留一些智駕系統(tǒng)功能,比如可以部分承載保留行車安全輔助性功能AEB、FCTA/B、RCTA/B,泊車報警輔助功能。
其二,是當主智駕域控失效時,整車域控檢測到對應(yīng)的失效狀態(tài)后接管控制車輛,啟動整車域控的基礎(chǔ)視覺感知,并結(jié)合雷達數(shù)據(jù)進行軌跡規(guī)劃和車輛控制,將車輛剎停至安全狀態(tài)。
2、硬件結(jié)構(gòu)設(shè)計
對于整車域控板間設(shè)計來說,考慮到其尺寸大小限制,同時可以考慮自身硬件級別的失效降級策略,可以將整車域控設(shè)計成雙層板模式(主板和副板)。兩層板間通過一定通信機制進行板間通信,當其中一個板子失效或出現(xiàn)問題時,可以啟動另一塊板子進行信息處理。?? 此外,對于硬件結(jié)構(gòu)設(shè)計來說,通常比較關(guān)注整個域控的散熱設(shè)計。業(yè)界對于整車域控的散熱來說,通常可以采用風冷對流散熱為主。通常,整車域控的雙層板子采用一定的隔熱設(shè)計,對于熱設(shè)計來說也無需考慮其中一塊板子的發(fā)熱對另一塊板子的散熱影響。一般情況下,整車域控制器通常采用風冷散熱。整個環(huán)境溫度和通風程度對其會產(chǎn)生較大的影響。如下公式表示了芯片結(jié)溫的影響要素。
芯片結(jié)溫=環(huán)境溫度+熱阻*功耗
因此,整個散熱過程大部分受制于環(huán)境溫度影響,其中就需要充分考慮熱對流的影響。散熱設(shè)計基本原理:自然散熱以輻射為主、風冷以對流為主。熱量傳遞主要是3種方式:傳導、對流、輻射。其中熱傳導主要是指分子之間的傳遞,主要是指盒子或模塊內(nèi)部的熱擴散。主要涉及的傳輸鏈路為器件——>PCB——>外殼體。自然對流主要是指流體混合作用的熱傳遞,包含盒子或模塊與外部環(huán)境的熱傳遞。熱輻射主要是物體溫度產(chǎn)生的電磁波傳遞能量。涉及盒子或模塊與外部環(huán)境的熱傳遞。如上自然對流和熱輻射的傳輸鏈路都為外殼體——>環(huán)境。
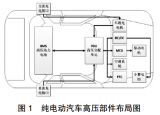
如下圖表示了一種典型的新能源車的散熱設(shè)計流程圖。
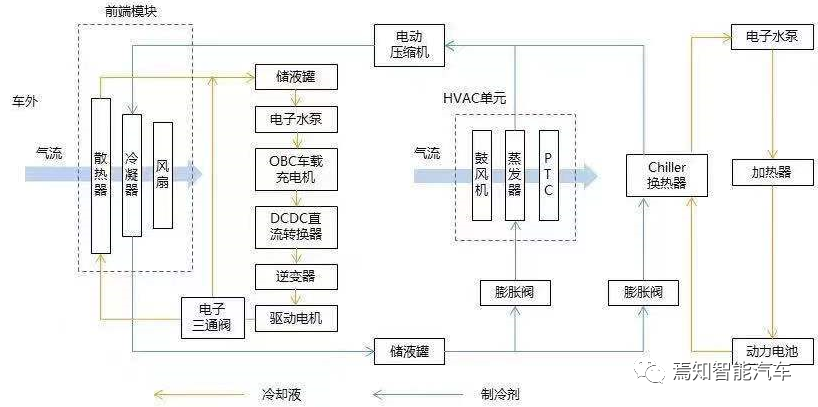
對于整車域控制器而言,由于其承載的相關(guān)聯(lián)ECU終端是比較多的,就有可能造成計算過程中較大的熱能,在做硬件設(shè)計中,其熱設(shè)計過程將顯得尤為重要。可以將整車域控制器布置在通風且空氣對流較好的環(huán)境中,這里需要充分考慮其風道設(shè)計出口是否存在熱風回灌的現(xiàn)象。
舉個之前研發(fā)設(shè)計較為失敗的粒子說明如何對散熱設(shè)計才能取得較好的散熱效果。
如下圖所示,當設(shè)計整車控制器的風道朝向一邊,而安裝位置如果位于一個相對較為封閉的環(huán)境中,且出風口一邊較為靠近密閉邊界,那么就很可能其由控制器輸出的熱風被阻擋反彈回來。這樣反彈回來的熱空氣又將重新進入入風口處,這樣就不可能起到很好的散熱。
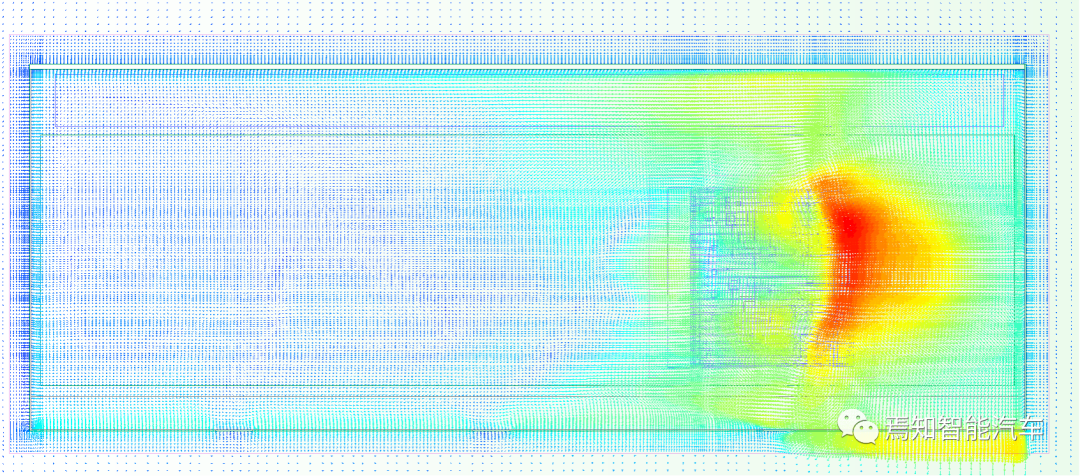
因此在散熱設(shè)計中需要從安裝位置(安裝位置不僅考慮通風性,還需要考慮出風口是否有足夠的風道距離使其充分接觸更多的冷空氣來降溫)、風道設(shè)計、控制器整體尺寸、功能降級(由系統(tǒng)工程師根據(jù)需要設(shè)定降級溫度閾值,當超過某個值時降級全功能為部分功能。比如按照環(huán)境最高使用溫度為85°,那么超過80°時,就將控制功能降級為僅存儲功能)等方面進行全方位考慮。若溫度規(guī)格降低,則整機尺寸可進一步降低(按照玻爾茲曼定律進行計算)。軟件方面也可以增加動態(tài)溫度-功耗控制措施。
當然最重要還是在選定布置位置時候選擇最合適的布置位置,考慮痛風性、密閉溫度限值等因素。當然也有部分有條件的情況下也可以考慮采用水冷措施,當然設(shè)計復雜度和成本也是較高。
3、硬件通信設(shè)計
VDC作為一種典型的中央網(wǎng)關(guān),既要能支持CAN通信路由,也要能支持以太網(wǎng)通信路由。一般情況下,CAN通信由于其穩(wěn)定性、安全性及成熟性。通常用來作為整車控制的信號協(xié)議類型,而Ethernet則是更多的承載智能終端數(shù)據(jù)通信,比如云端通信、智能駕駛數(shù)據(jù)顯示等。
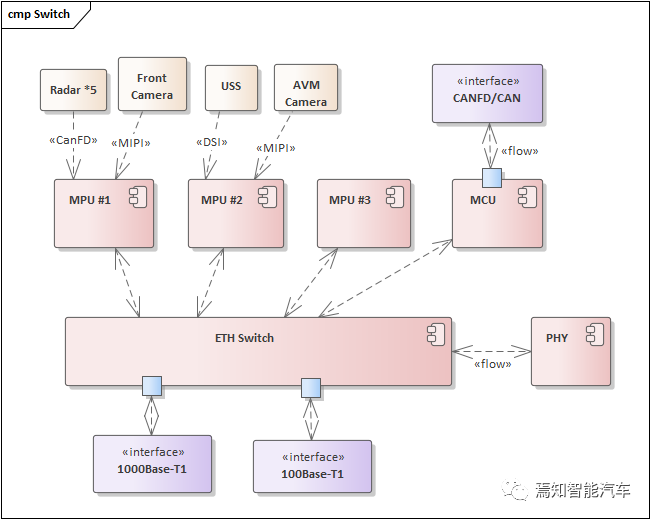
設(shè)計整車域控制器需要支持多路以太通信,從考慮縮小域控板子尺寸的角度出發(fā)考慮,通常將幾種不同的芯片布置于不同的板層。本設(shè)計的過程考慮行泊車低階控制過程中,兩大重點發(fā)熱芯片可能產(chǎn)生較大的發(fā)熱量,因此,分別將兩個MPU放在主板和副板上。此外,MCU放在主板上。主板和副板通過以太網(wǎng)Ethernet Switch連接至外部以太網(wǎng)通信端,整個Ethernet Switch的控制和配置由MCU完成。以太網(wǎng)Switch可以直接連出多路1000BASE-T1以及100BASE-TX接口。同時Switch還通過SGMII口和外擴PHY相連,可以引出多路1000BASE-T1口。對于實際通信連接過程中可以充分考慮通過多合一連接器進行信息合并,同時設(shè)計過程中充分考慮欠壓監(jiān)測、過溫檢測以及SQI的讀取能力。
設(shè)計VDC時還需要使用關(guān)聯(lián)ECU通信所需的N路CAN通信且兼容CAN-FD,CAN-FD接口電路采用標準CAN接口電路,支持ESD防護和終端匹配,每路CAN通信需要對應(yīng)的終端匹配電阻,并預留一定大小的共模電感,選擇性的根據(jù)EMC實測結(jié)果進行貼片。最重要的是支持任意幀CAN喚醒功能。
當然,對于一個標準的中央網(wǎng)關(guān)來說,還需要支持一定數(shù)量的LIN通信,并支持LIN喚醒,通信速率為1~20Kbps。默認為MASTER模式,通過電阻與二極管上拉配置,也可以根據(jù)具體需求配置成從模式,接口設(shè)計需要設(shè)計成ESD防護電路。
2.整車域控軟件框架及部署介紹
整車域控的軟件部署主要分為幾個方面車控相關(guān)SWC、網(wǎng)關(guān)相關(guān)SWC、智駕系統(tǒng)SWC。其部署原則為對實時性要求較高功能部署在實時核,運算需求較高放在運算核,對功能安全要求較高的功能部署在鎖步核。
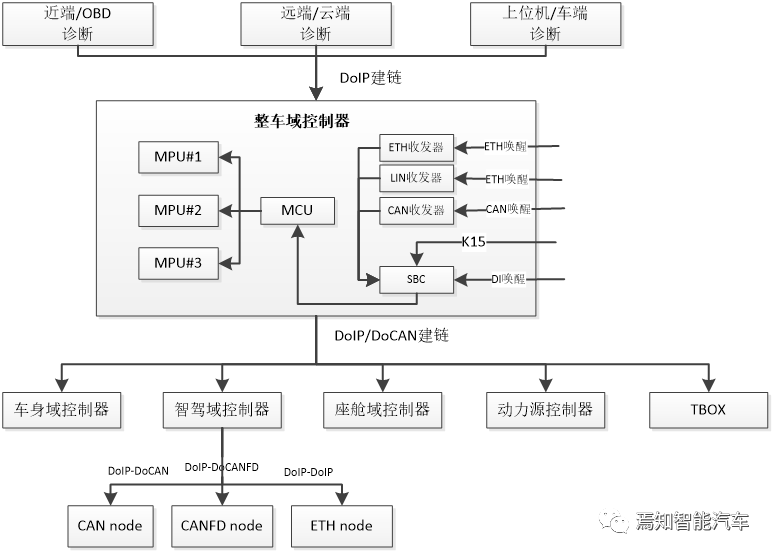
以如上圖中的整車域控架構(gòu)為例。MCU部署動力控制、底盤控制、通訊管理、本地診斷、電性能以及設(shè)備抽象等軟件模塊。對應(yīng)的算力主要是CPU邏輯算力,一般滿足10K DMIPS即可。同時MCU需要承擔整個VDC網(wǎng)絡(luò)喚醒、診斷功能、電源管理相關(guān)功能。
1、網(wǎng)絡(luò)管理功能
作為整車控制的終極大boss,VDC需要承擔整個網(wǎng)絡(luò)管理功能,其中網(wǎng)絡(luò)管理涉及網(wǎng)絡(luò)管理狀態(tài)機設(shè)計,網(wǎng)絡(luò)喚醒設(shè)計。
網(wǎng)絡(luò)管理狀態(tài)機中包含為整車域控設(shè)計各種工作模式。比如休眠(僅支持休眠喚醒狀態(tài))、待機(極低功耗)、準備(輕睡眠)、正常功耗(全功耗)、異常狀態(tài)(故障檢測)下的功耗等。各類不同的工作狀態(tài)需要通過設(shè)置不同的跳轉(zhuǎn)條件進行切換。
而對于網(wǎng)絡(luò)管理中重要的喚醒功能而言,其需要支持不同的喚醒源,主要需要包含CAN、LIN、硬線、以太網(wǎng)。結(jié)合上面的附圖說明喚醒過程。首先,四種喚醒源需要首先將SBC(一種包含電源、通信、監(jiān)控診斷、安全監(jiān)控等特性以及GPIO的獨立芯片)喚醒,隨即便可立即喚醒MCU。當MCU被喚醒后,可以對以太網(wǎng)Switch進行初始化配置確保以太網(wǎng)可以進行有效通信,這類初始化過程主要包括寄存器使能、收發(fā)路徑綁定等。隨后,MCU可以通過控制其他MPU的芯片供電來控制其余MPU的喚醒。
2、網(wǎng)絡(luò)診斷功能
整個VDC域控的診斷過程包含遠程診斷、近端診斷和OTA診斷。這三類診斷模型在構(gòu)建診斷通道時,需要首先將VDC接入到車端網(wǎng)絡(luò)中,實現(xiàn)兩種診斷模式DoIP和DoCAN。通常,DoIP部署在MPU上,DoCAN部署在MCU上。通過VDC協(xié)議棧部署DoIP網(wǎng)關(guān)建立鏈路(包含支持DoIP-DoIP,DoIP-DoCAN雙向診斷路由),部署DHCP客戶端。
對于診斷來說一般需要根據(jù)如下不同的診斷接入場景設(shè)置相應(yīng)的接入仲裁管理機制。這些診斷場景包括針對本地診斷、遠程診斷、產(chǎn)線EOL下的OBD接入,針對OTA場景下的車內(nèi)虛擬上位機接入。這三類OBD接入子場景通常情況下是不做具體區(qū)分的,而僅僅通過優(yōu)先級判斷可以在某一個固定的時刻激活其中一條鏈路。
對于OBD接入,優(yōu)先級最高;車內(nèi)上位機接入,優(yōu)先級中;車云接入,優(yōu)先級最低。當然,如果有兩類接入診斷源輸入時,通常需要由VDC進行有效的仲裁才能確保其功能多的正常響應(yīng)。仲裁原則為:兩個診斷業(yè)務(wù)優(yōu)先級相同時,遵循先到先得、平等互斥的原則,當高優(yōu)先級診斷接入低優(yōu)先級診斷業(yè)務(wù)時,需要緩慢退出低優(yōu)先級診斷,相應(yīng)的高優(yōu)先級診斷接入。當?shù)蛢?yōu)先級診斷接入高優(yōu)先級診斷時,需要否定響應(yīng)該低優(yōu)先級診斷業(yè)務(wù),并原路返回路由。
3、網(wǎng)關(guān)路由功能
針對VDC控制器在中央網(wǎng)關(guān)這一方面的作用而言,需要充分考慮其信號路由和協(xié)議轉(zhuǎn)換方面的要求。其中,協(xié)議轉(zhuǎn)換包括ETH數(shù)據(jù)轉(zhuǎn)換成LIN/CAN數(shù)據(jù)、CAN報文間互轉(zhuǎn)、ETH報文互轉(zhuǎn)、CAN診斷報文轉(zhuǎn)換成LIN/ETH診斷報文、ETH診斷報文轉(zhuǎn)換成 LIN/ETH診斷報文。
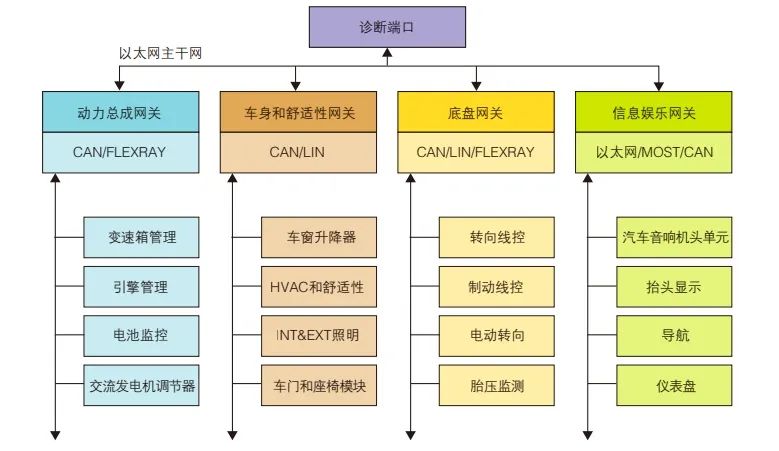
VDC的網(wǎng)關(guān)路由功能模塊通常是在一個專有的網(wǎng)關(guān)芯片(如前所述DRA821)上進行的,整個通信路由架構(gòu)參照如下圖所示。
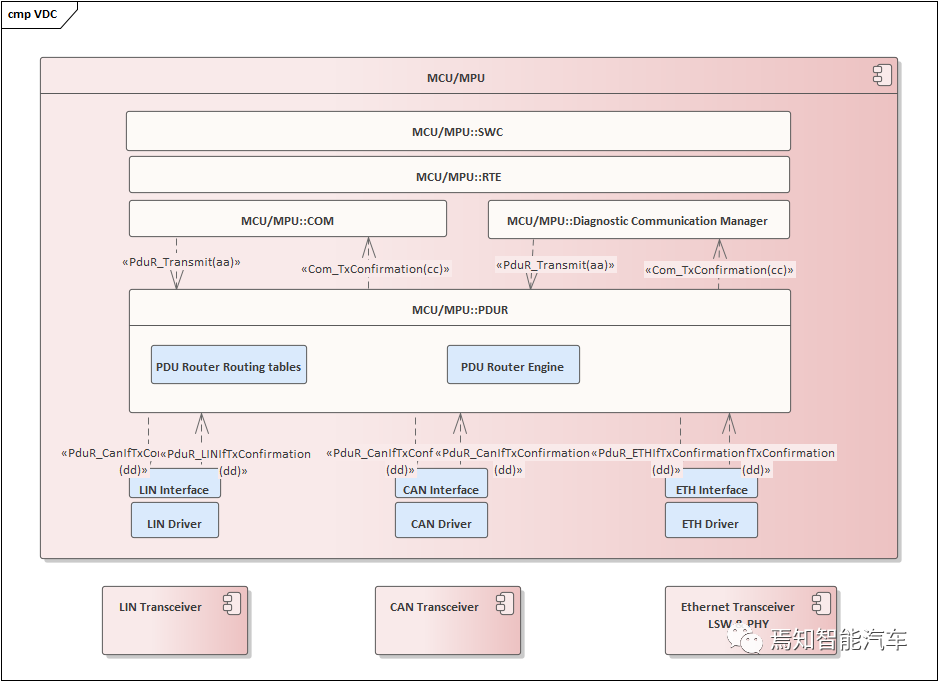
整個VDC的PDUR Router模塊功能包含單播、多播、網(wǎng)關(guān)1對多、多對一、多對多等多種方式的路由模塊功能。期間,PDUR Router 需要執(zhí)行PDU接收到本地模塊(I-PDU從下接收發(fā)送至上層)、PDU從本地模塊傳輸(I-PDU從上接收發(fā)送至下層)、PDU網(wǎng)關(guān)(從接口模塊和傳輸協(xié)議模塊接收I-PDU并傳輸至其他通信接口模塊)這三種功能。從而確保路由功能的有效性。
4、低階智駕功能
對于整車域控來講,在設(shè)計過程中通常會連帶作為智駕域控的低階版本,或者也有部分車型在做配置分析時,直接將低配或次低配的智駕功能移植到整車域控中進行。這時整車域控就相當于一個base版本的行泊一體控制器,需要承擔部分低階行泊車控制功能。因此,對于在VDC中植入不同處理能力的芯片單元時,盡量選擇具備集成式運算能力的超異構(gòu)芯片。既能滿足對行車功能的感知需求,也能滿足對泊車感知能力需求。這里推薦的中等算力的集成式超異構(gòu)芯片。可以采用目前國內(nèi)正火的J3/J5,也可以考慮TI系列芯片TDA4VM即可。
同時,在對傳感器的接入上需要充分考慮其所連接的智駕傳感器單元。當然,由于VDC的算力不算多,因此,可能不能接入過多超算力的傳感器(比如多組高分辨率攝像頭、原始點云的毫米波雷達和激光雷達)。
從保證基礎(chǔ)L2級及以下功能的角度上講,需要接入包含前視攝像頭(注意這里主要是前寬視攝像頭),1個毫米波雷達以確保能夠?qū)崿F(xiàn)1R1V的基礎(chǔ)L2傳感器配置。此外,考慮泊車輔助系統(tǒng)控制,整個VDC也需要將泊車相關(guān)的傳感器,環(huán)視+超聲波接入。當然,考慮到如果只是實現(xiàn)低階泊車輔助功能,其環(huán)視攝像頭的分辨率可以不必向高階全自動駕駛功能對齊,采用稍低分辨率也可。
審核編輯:湯梓紅
























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論