一種雷達防追尾預警系統設計(2)
2011年07月27日 16:17 本站整理 作者:秩名 用戶評論(0)
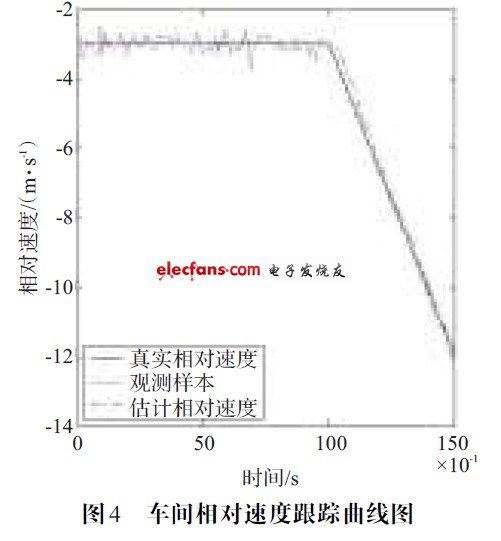
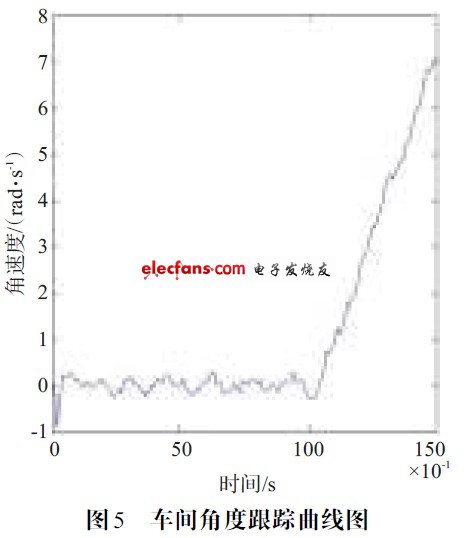
實驗設計:考慮兩輛車在道路上同向行駛,在0~10 s 時,兩車均保持勻速直線運動,由安裝在后車上的車載毫米波雷達檢測出與前車的距離為100 m,相對速度為-3 m/s,方位角2°。
在10~15 s 時,前車向右偏轉,與后車的相對角加速度為1° s2。
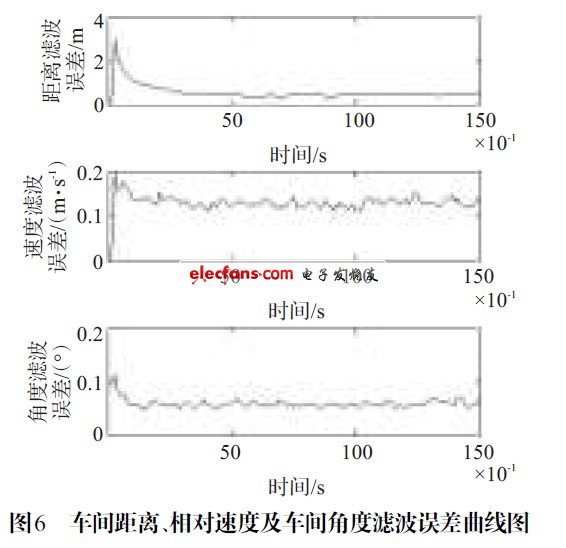
后車加速,與前車的縱向相對加速度為a = -1.8 m/s2。雷達的掃描周期為T=0.1 s,系統噪聲為σα = 0.3 m/s,σβ = 0.3°/s。量測誤差為σ1 = 1 m?σ2 = 0.5 m/s?σ3 = 0.2°/s。
車輛勻速直線運動模型:

車輛加速運動模型:
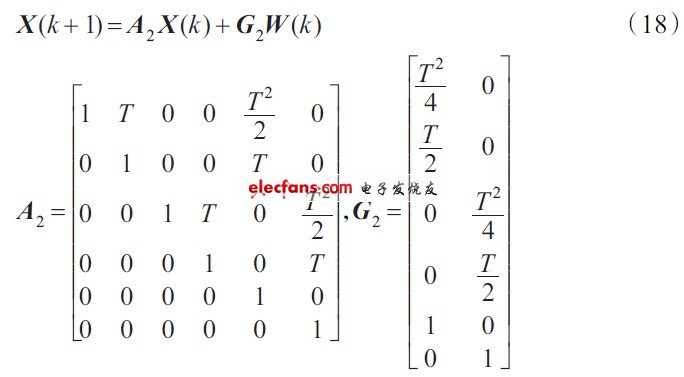
兩種運動模型的系統噪聲向量W(k)協方差矩陣Q(k)=
兩種運動模型的觀測模型都是Z(k) =HX(k) + V(k) 其中:

兩個模型之間的轉移概率矩陣是:
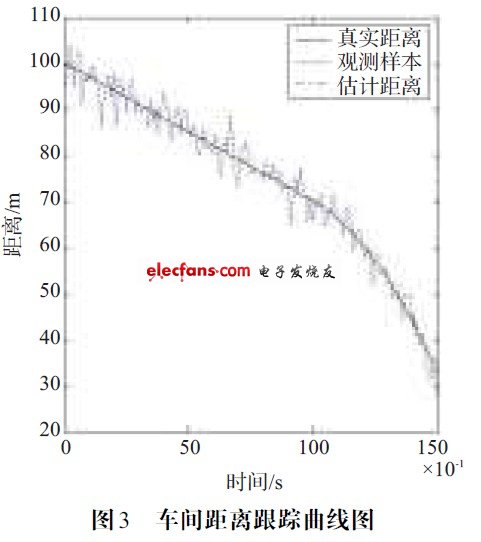
采用蒙特卡洛方法對跟蹤濾波器進行仿真分析,仿真次數為400 次。以下運用Matlab7.0 仿真的結果。
由圖3~圖6 仿真結果表明,該算法能夠有效地跟蹤前方車輛的運動信息,并且誤差較小,精度較高。
5 總結
重點研究了交互多模型機動目標跟蹤算法在車載毫米波雷達防追尾預警系統中的應用,介紹機動目標跟蹤算法原理和步驟,并以高速公路上行駛的汽車為對象進行防真,結果表明算法具有結構簡單、運算量小、精度較高的優點,能夠提高車載雷達防追尾預警系統的使用效率,從而提高車輛駕駛的安全性,具有一定的應用價值。
- 第 1 頁:一種雷達防追尾預警系統設計(1)
- 第 2 頁:IMM算法跟蹤仿真#
本文導航
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
相關閱讀:
- [FPGA/ASIC技術] 基于FPGA嵌入式系統的雷達目標模擬器的設計 2011-08-05
- [模擬技術] 雷達回波模擬器中頻部分的實現 2011-08-05
- [DSP] 基于CPCI接口DSP板的雷達目標模擬器 2011-08-04
- [DSP] 基于DSP的便攜式雷達系統 2011-08-03
- [通信設計應用] 雷達電磁波三維探測范圍可視化仿真 2011-07-23
- [DSP] 基于FPGA和DSP的雷達模目信號設計 2011-07-05
- [電力技術] 專家系統在雷達故障檢測中的應用 2011-06-23
- [嵌入式設計應用] PCI總線控制雷達視頻采集的設計方案 2011-06-22
( 發表人:小蘭 )