相比于單目視覺,雙目視覺(Stereo Vision)的關(guān)鍵區(qū)別在于可以利用雙攝像頭從不同角度對同一目標(biāo)成像,從而獲取視差信息,推算目標(biāo)距離。
2016-11-05 03:46:28 3097
3097 目前視覺方案做ADAS既有雙目也有單目,兩者在距離檢測上用了不同的技術(shù)路線,產(chǎn)品化時也存在各自優(yōu)缺點(diǎn),對此作者談了談自己的看法。
2016-12-30 14:48:185103 
據(jù)麥姆斯咨詢報道,物聯(lián)網(wǎng)及雙目視覺專家鉅芯發(fā)布了一款智能雙目立體視覺系統(tǒng),以及業(yè)內(nèi)首顆智能雙目立體視覺芯片eagleye100。
2017-10-26 10:26:219961 提出了一種使用低成本無人機(jī)實(shí)時生成探索地圖的解決方案。這依賴于Tello Edu無人機(jī)提供的信息,該無人機(jī)將圖像流式傳輸?shù)酵獠抗P記本電腦上以進(jìn)行實(shí)時處理。該解決方案運(yùn)行單目視覺 SLAM來注冊圖像并創(chuàng)建未縮放的環(huán)境地圖。
2022-08-29 16:02:571333 由大聯(lián)大世平推出的基于NXP S32V234雙目立體視覺解決方案,可顯著提高物體識別率以及識別種類,從而進(jìn)一步完善ADAS領(lǐng)域的相關(guān)應(yīng)用。
2021-05-18 14:13:291043 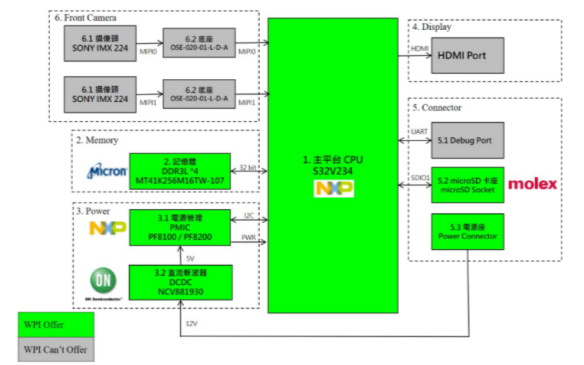
"恩智浦未來科技峰會”是恩智浦規(guī)模最大的高端行業(yè)峰會,旨在通過精彩座談、技術(shù)研討、最新科技和解決方案的展示引領(lǐng)業(yè)界通過技術(shù)創(chuàng)新為世界帶來改變!
2018-09-10 13:37:35
其使用的算法復(fù)雜。被動測距按照使用的視覺傳感器數(shù)量可分為單目視覺、雙目立體視覺和多目視覺三大類。 (1)單目視覺 單目視覺是指僅利用一臺照相機(jī)拍攝一張相片來進(jìn)行測量。因僅需要一臺相機(jī),所以該方法
2020-12-01 15:08:04
這項(xiàng)應(yīng)用的全面推廣和普及。 ADI視覺ADAS解決方案 與賽靈思采用FPGA作為核心開發(fā)器件不同,ADI的ADAS主要核心器件是DSP.ADI基于視覺的ADAS系統(tǒng)提供車道偏離警告、交通信號識別
2013-01-07 16:58:47
`雙目立體視覺原理大揭秘(一)——雙目視覺導(dǎo)航、定位;雙目立體視覺是一門有著廣闊應(yīng)用前景的學(xué)科,根據(jù)雙目立體視覺CCAS提供的思路及組成原理,隨著光學(xué)、電子學(xué)以及計算機(jī)技術(shù)的發(fā)展,將不斷進(jìn)步,逐漸
2013-11-21 16:20:51
將成為工業(yè)檢測、生物醫(yī)學(xué)、虛擬現(xiàn)實(shí)等領(lǐng)域的關(guān)鍵技術(shù),還有可能應(yīng)用于航天遙測、軍事偵察等領(lǐng)域。目前在國外,雙目體視技術(shù)已廣泛應(yīng)用于生產(chǎn)、生 活中。雙目立體視覺是計算機(jī)視覺的一個重要分支,單從雙目視覺
2013-11-21 16:22:03
雙目立體視覺(BinocularStereoVision)是機(jī)器視覺的一種重要形式,因其可簡單地利用左右攝像機(jī)中的圖像信息計算得到相機(jī)視野中物體相對于攝像機(jī)的深度信息使得該技術(shù)擁有廣泛的應(yīng)用前景
2021-12-23 07:19:52
四種:1、雙目視覺導(dǎo)航、定位;2、三維重構(gòu);3、雙目立體測量;4、空間三維立體跟蹤。這些運(yùn)用需求,其實(shí)很多項(xiàng)目上都有用到,如工業(yè)流水線上物體外形檢測、表面缺陷等,如娛樂活動中可以利用立體視覺構(gòu)造
2016-03-03 09:36:59
互通。 公司W(wǎng)indows產(chǎn)品管理高級總監(jiān)Aidan Marcuss表示,“我們之所以選擇恩智浦的NFC解決方案,是因?yàn)?b class="flag-6" style="color: red">恩智浦在近距離無線通信領(lǐng)域的領(lǐng)導(dǎo)地位。恩智浦對于NFC技術(shù)有著深入的了解,我們
2011-10-27 15:36:03
恩智浦的NFC控制器解決方案專為當(dāng)今的緊湊型系統(tǒng)而設(shè)計,能夠采用更少的元件實(shí)現(xiàn)更高的集成度,因?yàn)樗鼈兘Y(jié)合了NFC前端與先進(jìn)的32位微控制器。這些選項(xiàng)包括適合簡單、標(biāo)準(zhǔn)化接口的集成固件,或可自由編程
2018-11-08 15:56:47
高級處理能力和機(jī)器學(xué)習(xí)能力對于下一波邊緣應(yīng)用至關(guān)重要。機(jī)器學(xué)習(xí)用例在不同的市場和應(yīng)用領(lǐng)域大不相同,因而需要不同的加速計算性能,在功耗和整體解決方案成本方面也差別迥異。機(jī)器學(xué)習(xí)應(yīng)用提升計算性能和能效
2023-02-17 13:51:16
Open RAN(O-RAN)發(fā)展勢頭強(qiáng)勁,在全球迅速普及,恩智浦通過打造增強(qiáng)型參考設(shè)計,助力5G O-RAN的快速部署。這包括采用恩智浦RapidRF Smart LDMOS前端解決方案(稱為
2023-02-28 14:06:45
專為滿足更苛刻的處理要求而定制,是制造高分辨率角雷達(dá)和長距前向雷達(dá)的核心器件,可為L2+自動駕駛與高級駕駛輔助系統(tǒng)(ADAS)解決方案提供支持。ADAS整體解決方案專家CubTEK將基于恩智浦
2023-03-14 16:10:18
恩智浦半導(dǎo)體(NXP Semiconductors)近日為時尚、零售和電子市場推出了其最新的UHF解決方案。基于結(jié)構(gòu)簡單、經(jīng)濟(jì)高效的單天線解決方案,UCODE G2iL和G2iL+不僅實(shí)現(xiàn)了行業(yè)領(lǐng)先
2019-08-01 08:28:10
恩智浦智能賽車的驅(qū)動模塊定時器應(yīng)該定時多久才能開始打腳,定時一般怎么編寫
2017-03-30 17:27:20
恩智浦智能賽車舵機(jī)打腳pwm占空比實(shí)際是輸出電壓高低,但在定時器中處理要怎樣進(jìn)行
2017-03-30 17:38:10
`從以下幾方面詳細(xì)介紹恩智浦目前針對USBPD提供的負(fù)載開關(guān)產(chǎn)品:1. 恩智浦負(fù)載開關(guān)產(chǎn)品的規(guī)格2. 恩智浦負(fù)載開關(guān)產(chǎn)品的保護(hù)特性3. 恩智浦負(fù)載開關(guān)產(chǎn)品和分立方案的比較`
2015-06-03 15:21:07
制造商的理想解決方案。 日前,恩智浦半導(dǎo)體(以下簡稱“NXP”)對外發(fā)布一款用于X電容的自動放電IC--TEA1708.此器件擁有的自動放電功能加上抵抗電壓浪涌的高度耐用性,輕易的滿足了新的電源規(guī)范
2018-09-28 16:25:19
物聯(lián)網(wǎng)和人工智能(AI-IoT)已經(jīng)到來,如何在這場即將到來的大規(guī)模市場中取勝?恩智浦的無線連接主要體現(xiàn)在哪幾個方面?
2021-06-16 08:30:12
免費(fèi)咨詢熱線:4009-982-981深圳市鵬天自動化技術(shù)有限公司鵬天科技(香港)有限公司視覺專家解決方案-手機(jī)行業(yè)一、概述目前我國的機(jī)器視覺系統(tǒng)集成市場規(guī)模約80億,并且在自動化改造的過程中必須
2016-03-04 17:44:01
駕駛輔助系統(tǒng) (ADAS) 實(shí)施方案。基于 TISYS/BIOS RTOS 的TI 視覺 SDK 能夠在眾多的異型內(nèi)核上并行運(yùn)行多種算法,并更加容易地將新功能集成到系統(tǒng)之中。此外,豐富齊全的調(diào)試與儀表
2018-09-17 16:34:04
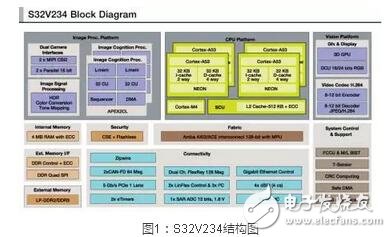
GHz 雷達(dá)系統(tǒng)參考設(shè)計五、世強(qiáng)高級汽車環(huán)視輔助駕駛系統(tǒng)(ADAS)方案……雙目視覺ADAS解決方案通過文檔,可了解以下內(nèi)容:一、雙目視覺 ADAS 芯片-S32V234二、雙目視覺 ADAS 的優(yōu)勢三、雙目視覺的測距步驟四、雙目視覺 ADAS 的應(yīng)用五、雙目視覺 ADSA 的解決方案六、總結(jié)
2020-06-02 15:09:59
最近在做一個雙目立體視覺項(xiàng)目,LABVIEW有模塊嗎,有哪位大神用LABVIEW做過
2018-01-13 19:44:32
` 本帖最后由 sszx2007 于 2020-3-2 17:04 編輯
LabVIEW雙目視覺原創(chuàng) 張冬斌 LabVIEW逆向工程高級編程 轉(zhuǎn)載至:https
2020-03-02 17:03:12
挑戰(zhàn),包括激光雷達(dá)、單目測距和雙目視覺技術(shù)等。在當(dāng)前的高級輔助駕駛技術(shù)(ADAS)中,雙目視覺技術(shù)在距離檢測方面表現(xiàn)出色,它可以精確地測量物體的距離,提供更客觀的數(shù)據(jù)。
為了應(yīng)對這一需求,設(shè)計了一種
2023-12-19 18:02:07
大佬們好我有一定的Labview基礎(chǔ),然而對Labview的雙目視覺測量所知甚少,現(xiàn)在有一個需求,就是在比較小的空間內(nèi)實(shí)現(xiàn)微米級的三維動態(tài)測量,想知道通過Labview雙目視覺有實(shí)現(xiàn)的可能性嗎?希望大佬們多多指導(dǎo)。感激不盡!謝謝!
2020-07-21 21:50:21
恩智浦汽車通用MCU方案介紹MagniV混合信號MCU控制方案綜述恩智浦ADAS視覺處理解決方案綜述恩智浦ADAS雷達(dá)解決方案綜述基于以太網(wǎng)的汽車網(wǎng)關(guān)方案V2X技術(shù)更新及趨勢恩智浦電源管理系統(tǒng)概覽恩
2018-06-06 16:46:44
的是稀疏的景深圖。由于雙目視覺系統(tǒng)需要匹配是整幅圖所有像素的對應(yīng)關(guān)系所有雙面視覺系統(tǒng)的計算量非常的龐大,而單片計算量相比而言小很多。雙目視覺系統(tǒng)的計算兩這個龐大,如果使用右邊每個像素到左邊的圖像中一
2017-09-17 17:56:27
和雙目視覺硬件等設(shè)計的試用。相信板子的廠家也非常樂于看到這個配套的硬件產(chǎn)生。3.整個項(xiàng)目涉及:雙目景深算法的開發(fā),里面有包含了雙目攝像頭的畸變校準(zhǔn),極坐標(biāo)的特征匹配,景深圖像的去噪聲,生產(chǎn)景深圖像;硬件
2017-08-21 12:42:45
申請理由:之前用wrtnode的u***接雙攝像頭外加一個么mcu實(shí)現(xiàn)過一個一個雙目視覺隨動平臺,這樣太麻煩了,希望能用這個來實(shí)現(xiàn)一個更簡單的解決方案。項(xiàng)目描述:u***接雙攝像頭,mcu控制云臺。通過WIFI將雙目視覺傳遞到手機(jī)進(jìn)行顯示,同時將手機(jī)的角度信息返回,控制云臺轉(zhuǎn)動。
2015-09-10 11:25:10
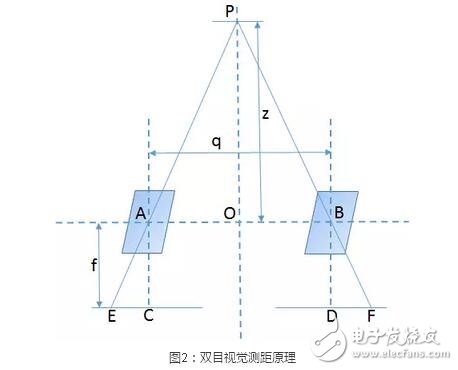
雙目視覺的原理:由于視差原理,左右兩個ccd的位置固定,若能測量空間中同一個點(diǎn)P在左右兩個ccd中圖像的位置,則根據(jù)三角原理,可以求得P點(diǎn)在空間中的坐標(biāo)位置。可用于攝像頭實(shí)現(xiàn)空間點(diǎn)的距離測量。下圖
2021-09-27 16:52:18
什么是Telepresence?介紹一種telepresence(遠(yuǎn)程呈現(xiàn))視覺協(xié)同運(yùn)作解決方案
2021-06-07 06:03:53
/sw.html懂滴的小伙伴都會點(diǎn)贊ADI基于雷達(dá)或視覺的先進(jìn)駕駛員輔助系統(tǒng)解決方案,貌似做汽車電子的筒子們都比較了解吧。 汽車?yán)走_(dá)ADAS,我們可以提供從射頻到數(shù)字端的完整信號鏈解決方案,從PLL
2018-10-15 09:18:26
2018年1月18日,致力于亞太地區(qū)市場的領(lǐng)先半導(dǎo)體元器件分銷商---大聯(lián)大控股宣布,其旗下世平推出基于恩智浦(NXP)QN9080的共享單車智能鎖解決方案。大聯(lián)大世平代理的NXP推出新型藍(lán)牙低功耗
2020-10-22 11:35:20
雙目視覺智能平臺概述硬件資源1 FMC 雙目MIPI模塊FL0214FL0214模塊的參數(shù)說明 FL0214模塊的結(jié)構(gòu)圖FL0214模塊原理框圖模塊FMC LPC的引腳分配
2021-01-01 06:18:17
` 本帖最后由 o_dream 于 2020-8-31 14:36 編輯
基于MCU的機(jī)器視覺,可實(shí)現(xiàn)具有成本效益的人臉識別 恩智浦基于MCU的機(jī)器視覺解決方案利用i.MX RT106F交叉
2020-08-31 14:35:02
`相比于單目視覺,雙目視覺(Stereo Vision)的關(guān)鍵區(qū)別在于可以利用雙攝像頭從不同角度對同一目標(biāo)成像,從而獲取視差信息,推算目標(biāo)距離。恩智浦視覺ADAS專用SoC: S32V234未來十年
2017-08-12 15:15:52
利用LABVIEW視覺模塊完成攝像機(jī)標(biāo)定,一般需要哪些vi?相關(guān)參數(shù)怎么設(shè)置?
2015-05-17 17:24:58
怎么實(shí)現(xiàn)單目視覺車道偏離報警系統(tǒng)的設(shè)計?
2021-05-13 06:06:39
。 那么,維視圖像的雙目立體視覺產(chǎn)品在以上應(yīng)用中到底有哪些優(yōu)勢呢,這個我們還要從典型的雙目應(yīng)用流程說起。一套典型的雙目視覺系統(tǒng)處理流程如下圖所示: 其中,維視圖像提供的雙目立體視覺系統(tǒng)已經(jīng)完成了雙目標(biāo)定所
2016-01-19 16:59:12
。第六章主要對整個系統(tǒng)鏈路指標(biāo)進(jìn)行了分析,其中包括接受靈敏度和發(fā)射功率等,進(jìn)一步說明了 77GHz 車載雷達(dá)系統(tǒng)的可行性,并對射頻前端電路進(jìn)行了加工和測試,為后續(xù)工作積累經(jīng)驗(yàn)。ADAS視覺方案及11家創(chuàng)業(yè)
2020-06-04 15:15:44
、基于單目特征的室內(nèi)定位導(dǎo)航等。同時,單目視覺是其他類型視覺系統(tǒng)的基礎(chǔ),如雙目立體視覺、多目視覺等都是在單目視覺系統(tǒng)的基礎(chǔ)上,通過附加其他手段和措施而實(shí)現(xiàn)的。雙目立體視覺雙目立體視覺。雙目視覺
2018-12-13 21:23:57
基于DM642的機(jī)器人雙目視覺系統(tǒng)設(shè)計
2021-04-02 07:20:41
高級駕駛員輔助系統(tǒng)(ADAS)解決方案是增長最快的汽車行業(yè)之一;根據(jù)Strategy Analytics的預(yù)測,該領(lǐng)域預(yù)計在五年間(2015-2020)增長了10%。即使是入門級模型的設(shè)計者也期望
2022-11-14 07:11:26
實(shí)現(xiàn)單目視覺同時定位與建圖(SLAM)仿真系統(tǒng),描述其設(shè)計過程。該系統(tǒng)工作性能良好,其SLAM算法可擴(kuò)展性強(qiáng),可以精確逼近真實(shí)單目視覺SLAM過程。以方便SLAM算法的研究為目標(biāo),提
2009-04-15 08:50:37 82
82 根據(jù)雙目視覺傳感器的工作原理, 分析了影響測量精度的因素, 表明雙目視覺傳感器的物體空間坐標(biāo)與圖像坐標(biāo)之間存在復(fù)雜的非線性映射關(guān)系, 其數(shù)學(xué)模型無法用解析式精確地加以
2009-07-10 15:53:1111 對于基于圖像的具有手眼或固定攝像機(jī)模式的雙目視覺伺服控制系統(tǒng),考慮機(jī)器人的運(yùn)動學(xué)特性,在攝像機(jī)的內(nèi)外參數(shù)部分未知的情況下,給出了一種直接自適應(yīng)控制器實(shí)現(xiàn)定位
2010-01-11 15:57:3118 本文主要從控制角度出發(fā),針對手眼機(jī)器人雙目視覺伺服控制問題,利用變結(jié)構(gòu)控制理論設(shè)計了視覺伺服控制器,同時用自適應(yīng)估計的方法對深度進(jìn)行估計,基于圖像誤差實(shí)現(xiàn)了定
2010-01-13 14:43:2719 文章介紹了一種以TMS320DM642 為核心,結(jié)合編解碼芯片SAA7115 和SAA7105 組成的高速圖像處理系統(tǒng),和典型的電機(jī)控制芯片TMS320F2812 為核心的電機(jī)控制系統(tǒng),組成了基于雙目視覺的跟蹤機(jī)
2010-01-18 15:28:3828 提出一種新的三維坐標(biāo)測量方法,該方法基于雙目視覺、雙頻光柵投影、相移和三角測量等測量方法。測量系統(tǒng)采用兩個攝像機(jī)記錄投影光柵,通過分析雙頻投影條紋不同柵距的
2010-01-22 12:10:3820 雙日視覺是計算機(jī)視覺領(lǐng)域的一個重要組成部分。雙目視覺研究中的關(guān)鍵技術(shù)攝像機(jī)標(biāo)定和立體匹配一直是研究的熱點(diǎn)。本文由兩部分組成,分別對雙目視覺的算法和未標(biāo)定圖
2010-08-14 16:41:540 本內(nèi)容基于ADSP-BF548處理器設(shè)計實(shí)現(xiàn)了具有結(jié)構(gòu)光雙目視覺的四足可變形仿生機(jī)器人系統(tǒng)
2011-08-31 17:42:15144 根據(jù)雙目立體視覺傳感器三角立體視差模型,建立了結(jié)構(gòu)參數(shù)誤差的傳遞函數(shù),分析了雙目視覺傳感器結(jié)構(gòu)參數(shù)及其誤差傳遞規(guī)律對傳感器綜合測量精度的影響,得出了結(jié)構(gòu)參數(shù)的合理
2011-09-06 14:38:4075 本文以遺視投影變換為依據(jù),針對多視覺傳感器檢測系統(tǒng)中的雙目視覺傳感器,建立了雙目視覺傳感器測量空間三維坐標(biāo)的模型.事先確定攝像機(jī)的部分不易變化的參數(shù),其它參數(shù)在攝
2012-03-02 16:02:1315 基于視覺的高級駕駛員輔助系統(tǒng)(ADAS)可以從多方面大大提高行車安全性。通過安裝后視/前視/側(cè)視攝像頭和視覺處理ECU,可以實(shí)現(xiàn)多種功能來幫助駕駛員提前防范風(fēng)險。受歡迎的應(yīng)用包
2012-12-04 15:51:30119 本內(nèi)容提供ADAS應(yīng)用解決方案的半導(dǎo)體廠商,讓大家更加了解當(dāng)前有哪些主流的ADAS應(yīng)用解決方案。
2013-01-10 11:17:301503 雙目視覺是利用機(jī)器視覺進(jìn)行障礙物檢測的研究熱點(diǎn)。針對雙目視頻不同步,導(dǎo)致立體匹配不精準(zhǔn)的問題,提出了一種基于圖像處理的雙目校準(zhǔn)算法。算法首先根據(jù)道路的先驗(yàn)特征模型,建立視覺校準(zhǔn)的敏感區(qū)域,以減小
2015-12-18 16:26:5734 電子開發(fā)機(jī)器人相關(guān)教程資料——全自主機(jī)器人雙目視覺運(yùn)動檢測
2016-09-06 16:42:430 全自主機(jī)器人垂直異構(gòu)雙目視覺研究,感興趣的小伙伴們可以瞧一瞧。
2016-09-18 17:15:050 APEX2CL 的視覺加速引擎。每個 APEX2CL 擁有 64 個
本地計算單元(CU),并配有本地內(nèi)存和專用 DMA,通過 SIMD/MIMD(單指令多數(shù)據(jù)/多指令多
2016-12-30 14:55:3725 基于雙目視覺伺服反饋的非完整移動機(jī)器人軌跡跟蹤_王寶磊
2017-03-16 09:17:261 問題,、提出一種基于雙目視覺的投影儀標(biāo)定算法,將投影儀視為逆向相機(jī),利用一個輔助相機(jī)捕獲投影于不同位置標(biāo)定平面,確立攝像機(jī)圖像與標(biāo)定平面之間的對應(yīng)關(guān)系,然后利用極線原理得到攝像機(jī)圖像與投影儀圖像之間的對應(yīng)關(guān)
2017-11-06 15:30:2120 雙目立體測量的特點(diǎn)類似于“雙目導(dǎo)航、定位”,一般來說:第一、需要提取的點(diǎn)不多,僅把被測物需要測量部分的點(diǎn)找到即可;第二、速度要求較高,一般要求一秒中測量多個產(chǎn)品;第三、對光照環(huán)境要求高。因?yàn)闇y量的時候相機(jī)和被測物必然有相對位移,所以拍攝到的圖像可能各個角度都會有。
2018-01-23 11:32:5322024 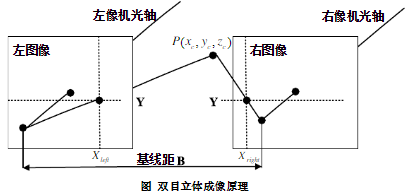
雙目視覺導(dǎo)航敏感器BVS逐漸成為各國航天最新領(lǐng)域的研制熱點(diǎn)。雙目立體視覺是由不同位置的兩臺或者一臺攝像機(jī)經(jīng)過移動或旋轉(zhuǎn)拍攝同一幅場景,通過各種算法匹配出相應(yīng)像點(diǎn),從而計算出視差,然后基于三角測量
2018-01-25 14:00:160 雙目立體視覺是機(jī)器視覺的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。雙目立體視覺系統(tǒng)一般由雙攝像機(jī)從不同角度同時獲得被測物的兩幅數(shù)字圖像,或由單攝像機(jī)在不同時刻從不同角度
2018-02-08 14:46:2449071 雙目立體視覺是基于視差,由三角法原理進(jìn)行三維信息的獲取,即由兩個攝像機(jī)的圖像平面和北側(cè)物體之間構(gòu)成一個三角形。一直兩個攝像機(jī)之間的位置關(guān)系,便可以獲得兩攝像機(jī)公共視場內(nèi)物體的三維尺寸及空間物體特征點(diǎn)的三維坐標(biāo)。所以,雙目視覺系統(tǒng)一般由兩個攝像機(jī)構(gòu)成。
2018-04-11 14:32:5523098 
依托自主研發(fā)的嵌入式主動/被動雙目立體視覺技術(shù),人加已經(jīng)推出雙目AI攝像頭產(chǎn)品——“司眸”系列,可以為各類機(jī)器人提供立體視覺感知解決方案,讓機(jī)器人擁有人體感知、自主避障等視覺智能,為下游客戶提供成熟、可量產(chǎn)的解決方案。
2018-06-07 14:44:085570 基于77GHz雷達(dá)的ADAS解決方案
2018-06-28 14:14:004305 的逐步成熟,人機(jī)協(xié)作的不斷深入發(fā)展,機(jī)器人產(chǎn)品應(yīng)用不斷擴(kuò)展,全球機(jī)器人將迎來新一輪的增長。 自創(chuàng)立之初,INDEMIND便一直致力于計算機(jī)視覺技術(shù)的研發(fā)與應(yīng)用創(chuàng)新,旗下自研的雙目視覺慣性模組及高精度Vi-SLAM算法已應(yīng)用于掃地機(jī)器人、服務(wù)機(jī)器人、穿戴計
2020-03-21 15:33:541033 視覺技術(shù)升級進(jìn)步。丨深耕不輟,實(shí)現(xiàn)業(yè)內(nèi)首款200幀雙目慣性相機(jī)面對日益提升的使用需求,為提升產(chǎn)品適用性,INDEMIND深耕不輟,為旗下雙目視覺慣性模組提供了200幀高速環(huán)境獲取能力,滿足了不同場景
2019-04-28 18:33:111894 的掃地機(jī)器人導(dǎo)航方案,能夠更好地引領(lǐng)掃地機(jī)器人向家庭清潔智能助手轉(zhuǎn)變,隨著技術(shù)的不斷進(jìn)步,可以預(yù)見,雙目視覺導(dǎo)航系統(tǒng)將會逐漸成為掃地機(jī)器人主流導(dǎo)航定位方案。
2019-07-15 19:00:301754 在雙目相機(jī)領(lǐng)域是非常煎熬和糾結(jié)的,煎熬來自哪里呢?
2019-07-11 16:39:195748 智能駕駛輔助技術(shù)供應(yīng)商極目智能(下稱“極目”)正式對外發(fā)布旗下最新車規(guī)級視覺 ADAS 解決方案 JM600 V3.0,該系統(tǒng)搭載賽靈思(Xilinx)高性能 FPGA 平臺,整合極目在深度學(xué)習(xí)技術(shù)方面的最新研發(fā)成果,在性能和成本的平衡上取得了不錯的效果。
2019-08-15 15:01:261218 了人的視野范圍。雙目視覺一直是機(jī)器視覺領(lǐng)域的熱門研究課題,在工業(yè)控制、智能交通、金融、公共安全等應(yīng)用領(lǐng)域逐漸顯示出非常廣闊的發(fā)展前景。詳細(xì)分析和研究基于DM642的雙目視覺監(jiān)控系統(tǒng),給出系統(tǒng)的軟硬件設(shè)計方案,并在DM642開發(fā)評估板(EVM)上實(shí)現(xiàn)系統(tǒng)功能。
2020-05-07 09:55:59966 1.1. 雙目視覺簡介 雙目視覺廣泛應(yīng)用在機(jī)器人導(dǎo)航,精密工業(yè)測量、物體識別、虛擬現(xiàn)實(shí)、場景重建,勘測領(lǐng)域。 什么是雙目視覺? 雙目視覺是模擬人類視覺原理,使用計算機(jī)被動感知距離的方法。從兩個或者
2020-10-23 09:51:5710867 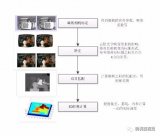
前言 雙目立體視覺,由兩個攝像頭組成,像人的眼睛能看到三維的物體,獲取物體長度、寬度信息,和深度的信息;單目視覺獲取二維的物體信息,即長度、寬度。 1)雙目攝像頭 常見的雙目攝像頭有以下幾款: 能看
2021-04-26 14:19:438965 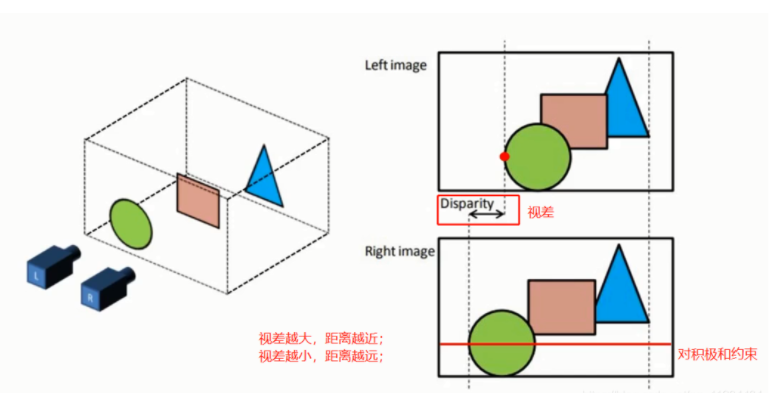
雙目視覺技術(shù)的原理、結(jié)構(gòu)、特點(diǎn)、發(fā)展現(xiàn)狀和發(fā)展方向分析 雙目立體視覺是機(jī)器視覺的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。 雙目立體視覺系統(tǒng)一般由雙攝像機(jī)從不同角度同時
2021-06-01 16:36:562223 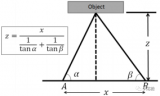
嵌入式雙目視覺系統(tǒng)和三維重建技術(shù)研究(嵌入式開發(fā)方向)-該文檔為嵌入式雙目視覺系統(tǒng)和三維重建技術(shù)研究總結(jié)文檔,是一份很不錯的參考資料,具有較高參考價值,感興趣的可以下載看看………………?
2021-07-30 11:50:037 機(jī)器視覺可代替人眼對物體進(jìn)行檢測和識別,較為常見的是利用單目攝像頭。若要獲取物體的深度信息,僅憑單目攝像頭是不完善的,通常情況下需選擇雙目攝像頭來獲取物體三維信息。
2022-04-07 09:42:442123 摘要:針對基于雙目深度圖的室外大規(guī)模地圖構(gòu)建計算冗長,而在無人系統(tǒng)的有限算力下,計算效率需求顯著的情況,文中提出一種基于雙目視覺立體匹配的三維地圖構(gòu)建方法。首先針對由立體匹配算法及原圖引入的噪聲誤差
2022-08-10 11:38:122020 雙目標(biāo)定和普通相機(jī)的標(biāo)定一樣,其標(biāo)定時不僅標(biāo)定出兩個相機(jī)的內(nèi)參,還要標(biāo)定出兩個相機(jī)之間的關(guān)系。因此,在進(jìn)行雙目標(biāo)定時,需要使兩個相機(jī)對同一標(biāo)定板進(jìn)行多次取圖,分別標(biāo)定出各自的內(nèi)參和相對于標(biāo)定板的外參,然后便可計算出兩相機(jī)位置間的關(guān)系:
2022-10-10 17:25:311009 上實(shí)現(xiàn)雙目視覺算法stereoBM的openCL版本的移植和優(yōu)化,移植后的算法在GPU平臺上性能提升明顯。 展銳T710開發(fā)板內(nèi)部集成了Imagination GM9446顯示芯片,主頻為800MHz
2022-11-28 10:20:05483 輸入數(shù)據(jù)來源可以是單目視覺相機(jī)、雙目視覺相機(jī),數(shù)據(jù)可以是灰度圖或者彩色圖。
基于單目圖片的稱為單目車道線檢測技術(shù),基于雙目圖片的稱為雙目車道線檢測技術(shù)。
2023-06-01 14:18:320 雙目視覺傳感器有效彌補(bǔ)了數(shù)據(jù)驅(qū)動的 AI 算法在泛化性能上的短板,深度學(xué)習(xí)模型與視差點(diǎn)云技術(shù)的結(jié)合,極大擴(kuò)張了視覺傳感器的工作邊界。
2023-06-07 14:16:32218 
雙目視覺算法stereoBM的openCL版本的移植和優(yōu)化,移植后的算法在GPU平臺上性能提升明顯。展銳T710開發(fā)板內(nèi)部集成了ImaginationGM9446顯
2022-11-30 15:41:43302 
本文對ToF、雙目視覺、結(jié)構(gòu)光這三種技術(shù)展開分析,幫助你了解其各自的特點(diǎn)及應(yīng)用
2023-07-10 16:04:16904 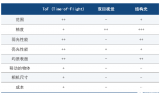
、圖像預(yù)處理和特征提取、立體匹配以及三維重建。為解決智能移動機(jī)器人、工業(yè)裝配機(jī)器人、家用機(jī)器人、公共服務(wù)機(jī)器人的視覺問題,雙目立體視覺技術(shù)的進(jìn)一步研究可對多目視覺具有重要的啟發(fā)。 本文對雙目立體視覺測深
2023-07-19 14:18:240 雙目更多的是基于物理測量,而單目視覺則是基于邏輯推理,通過大量的數(shù)據(jù)訓(xùn)練,先識別出目標(biāo),再根據(jù)目標(biāo)的大小和高度估算距離。因此,單目視覺的漏檢率高于雙目立體視覺,因?yàn)榭陀^上存在corner case。
2023-08-17 09:40:062170 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論