安裝MATLAB2017A后發現找不到自動駕駛工具箱是什么原因
2017-06-07 12:37:23
的智能化汽車汽車雷達高端論壇自動駕駛防真系統開發、控制V2X與協同式自動駕駛自動駕駛地圖與高精度定位自動駕駛汽車與智能交通的技術現狀傳感器與自動駕駛發展的需求激光雷達在自動駕駛中的角色自動駕駛之路的地圖
2019-12-08 15:01:03
還放眼全球,在首批合作伙伴陣容中,海外企業及機構占比近30%。 百度公司副總裁鄔學斌在Apollo生態合作伙伴聯盟啟動儀式上指出,自動駕駛普及面臨產業結構變革、技術本身及配套法規準則等
2017-07-07 18:28:50
` 誰來闡述一下5g與自動駕駛有什么關系?`
2019-11-22 16:54:31
初創公司進入自動駕駛市場的一個門檻較低的入口。攝像頭:車載攝像頭是最基本常見的傳感器,價格低廉且應用廣泛同時具備雷達無法完成的圖像識別功能,不僅可以識別路牌,在自動駕駛系統的圖像處理方案中也是不可或缺
2017-09-06 11:36:58
Geiger 的研究主要集中在用于自動駕駛系統的三維視覺理解、分割、重建、材質與動作估計等方面。他主導了自動駕駛領域著名數據集 KITTI 及多項自動駕駛計算機視覺任務的基準體系建設,KITTI 是目前最大的用于自動駕駛的計算機視覺公開數據集。
2020-07-30 06:49:20
作者:余貴珍、周彬、王陽、周亦威、白宇目錄第一章 自動駕駛系統概述1.1 自動駕駛系統架構1.1.1 自動駕駛系統的三個層級1.1.2 自動駕駛系統的基本技術架構1.2 自動駕駛技術國內外發展1.3
2021-08-30 08:36:23
自動駕駛AI芯片到位了么?
2020-12-04 06:13:55
隨著電動車的EE架構從分布式向集中式演進、自動駕駛等級從L2向L2+、NOA/NOP乃至L4演進,系統對自動駕駛OS(操作系統)的要求也越來越高。并且,由于事關生命安全,自動駕駛OS對實時性及可靠性
2021-07-27 07:48:59
什么叫自動駕駛?
2020-07-31 06:53:59
我們能避免其發生。這正是自動駕駛的主要目標之一:車輛中的傳感器、通信能力、執行器和人工智能(AI)協同工作,收集并分析信息,從而比最好的人類司機更快、更及時地做出決策。我們在開車時獲得的大部分信息來自于
2018-10-30 11:51:34
k隨著汽車電子的日益復雜化以及汽車電子電氣架構(EEA)的升級,人們對于聯網智能汽車的需求也在逐步上升,大量先進技術往汽車上應用,如高級駕駛輔助系統(ADAS)、自動駕駛等,這些新技術也對車載網絡
2021-09-03 08:31:28
未來汽車業界的商業模式,除了各家都在布局的自動駕駛汽車組成的汽車共享服務車隊,還有什么新模式?比如和無人機結合。今天的日內瓦車展上,路虎發布了一款特種車輛系統,簡單來說,這是一款以路虎發現為原型
2018-07-14 15:43:38
特斯拉在五月份發生的自動駕駛事故,和最近在Defcon上演示的如何干擾傳感器,都充分說明了傳感器在自動駕駛中的重要性:環境感知是自動駕駛實現的基礎,如果不能正確地感知周圍環境,那么接下來的認知、決策與控制,都是空中樓臺。
2020-05-14 07:34:45
公路上測試自動駕駛汽車的項目。這次事故提醒人們自動駕駛技術依然處于試驗階段,業界內廠商依然在努力尋找確保其穩定性的方法。在不久的將來,大部分汽車將成為自動駕駛。人們如果要依賴這項技術,就必須確保它們
2019-01-08 10:53:26
作在未來20 - 30年中,自動駕駛汽車(AV)將改變我們的駕駛習慣、運輸行業并更廣泛地影響社會。 我們不僅能夠將汽車召喚到我們的家門口并在使用后將其送走,自動駕駛汽車還將挑戰個人擁有汽車的想法,并
2019-08-07 07:13:15
解決“我在哪兒”的問題,并且自動駕駛需要的是厘米級定位。目前自動駕駛的技術基本上都源自機器人,自動駕駛汽車可以看做是輪式機器人外加一個舒適的沙發組成。機器人系統中定位和路徑規劃是一個問題,沒有定位
2019-05-09 04:41:09
的Telematics收發芯片,非常適合V2V及V2X等相關應用中。 相比于傳統的底盤、發動機等傳統汽車技術,自動駕駛更多的技術集中在電子領域,而且核心技術并沒有被跨國車廠或Tier1所壟斷。并且
2017-06-08 15:25:32
特斯拉事故被曝光后,對于特斯拉autopilot配備的硬件,外界質疑不斷。 TEEC天使基金管理合伙人張于慶稱,今天的自動駕駛主要建立在傳感器、照相機等設備之上。在特斯拉致使事件中,因為卡車
2016-07-21 09:00:38
:自動駕駛系統:量產導向還是性能導向, 自動駕駛系列報告三:車載芯片篇,自動駕駛芯片,GPU的現在和ASIC的未來, 自動駕駛系列報告之四:傳感器篇,多傳感器融合自動駕駛系列報告之五:控制執行篇,轉向制動電子需要報告的關注微信公眾號:AI汽車人回復“自動駕駛報告”領取`
2019-08-09 17:14:24
與自駕儀、電機控制器MCU、電池管理系統BMS、線控轉向、線控制動、線控燈光等系統進行信息交互,通過對接收到的信息的處理,判斷各個子控制單元和整車系統的狀態,做出合理、安全的指令,從而讓各個子控制單元協調、安全的工作,實現自動駕駛電動車系統的功能。通常整車控制器將需要采集整車檔位信號,油門踏板...
2021-09-07 06:30:56
專業的自動駕駛行業報告-國金證券
2020-09-02 17:26:45
用于自動駕駛汽車和高級駕駛輔助系統(ADAS)的復雜芯片(SoC)的開發和驗證是一片雷區,無論是車內還是無法預知的道路條件,都構成了一個難點。芯片設計人員經常在完成錯綜復雜的汽車芯片設計之后,又意識到他們必須回頭重新編寫,有時甚至需要不停地重復,直到得到滿意的結果。但是稍不注意,就會觸雷。
2019-09-11 11:52:12
隨著高精度傳感、自動化、人工智能等技術的飛速發展,預計到2021年市場上會出現第一批完全沒有方向盤等駕駛控制器的自動駕駛量產車。當汽車可以自主地完成駕駛任務時,汽車的內飾和交互設計將具有更多想象空間
2020-07-30 07:57:43
自動駕駛車輛中采用的AI算法自動駕駛車輛中AI面臨的挑戰
2021-02-22 06:39:55
ADAS到自動駕駛還有多長的路要走?
2020-12-10 07:03:08
由南德意志出版及活動有限公司舉辦的 國際AI自動駕駛高峰論壇 將于 2017年11月28/29日 在 德國慕尼黑 舉辦,中德聯合股份公司作為中國獨家合作伙伴,誠邀您撥冗蒞臨!【活動背景】AI
2017-09-13 13:59:54
LG電子(LG Electronics)宣布,在其年底進行業務重組期間,將成立兩個新部門,機器人和自動駕駛汽車部門,兩部門都由該公司首席執行官直接管理。據羿戓信息所了解,該家韓國科技巨頭表示,成立
2018-12-03 22:14:00
最近有關自動駕駛汽車的消息很難避免。自動駕駛車輛驅動了超過5000萬的實際物理里程,更不用說數億英里的模擬里程了。不幸的是,隨著糾結的解決,已經并且將會發生事故。在每個人最喜歡的搜索引擎和與愛迪生
2018-10-30 14:30:22
達到950以上,而在其他較弱紋理區域也能維持在900左右。誤差率低至5%以下,甚至在特征點明顯的標志物上可達到2%左右。
基于LabVIEW的雙目測距系統在自動駕駛中具有廣泛的應用前景,它可以為車輛提供
2023-12-19 18:02:07
比其他類似功能的傳感器價格低,定位精度更高。為此改變了傳統UWB的被動定位方式拓撲結構,克服被動定位系統在自動駕駛應用中的幾個致命問題,顛覆性提出了尋ME主動定位系統,實現了以下功能:1. 廣播式發射
2018-12-14 17:30:15
的到達時間發生變化,只要是納秒級別的變化,誤差就會在30厘米左右。因此,如果自動駕駛的過程中,如果出現了汽車的過車等行為都會導致定位的誤差變大,這個在高速運動的車上是比較致命的問題,所以這樣的場景UWB
2020-11-18 14:15:16
,并輔助激光雷達評估行駛過程中位置和姿態,實現自動駕駛實際運行的可靠性。在UWB定位系統的布設中,基站采用無需聯網離線供電安裝,通過標簽直接解算相對坐標(轉換為WSG84坐標)提供給ECU,可與GPS
2020-10-26 16:41:56
自動駕駛汽車利用GPS(全球定位系統)、傳感器、相機、雷達和激光“看”它們周圍的環境。傳感器能發現距離汽車2個足球場遠的物體——其中包括人、車輛、施工區、鳥、騎車人等。 2010年,谷歌自動駕駛汽車測試
2016-10-25 11:08:31
小車運動的控制信號,實現小車自動駕駛。在初步實現方案中,為了快速實現整體功能,使用軟件神經網絡作為控制器,使用單片機作為底盤電機的控制器。在進一步的實現中,所有數據處理和底盤控制全部由Zynq FPGA
2019-03-02 23:10:52
申請理由:很喜歡硬件功能完善的機器人,這款機器人上面的多種傳感器及器件均用過,超聲波傳感器和巡線傳感器還未接觸過,想了解下這種傳感器的靈敏度和精度,而且近年來自動駕駛汽車興起,還希望借此做一款
2015-11-30 15:30:17
據外媒報道,蘋果公司一項最新專利申請近日曝光,該公司正在研發一種靈巧的虛擬現實(VR)系統,將用于自動駕駛汽車,緩解乘員的暈車癥狀。在最近幾周里,美國專利和商標局公布了蘋果的多項虛擬現實技術專利,但
2018-04-24 17:05:48
自動駕駛技術已經有足夠積累,雖然還不完美無缺,但是可以投入商用,科技都是在使用中完善的,不能一遭被蛇咬,十年怕井繩,難道發生一次空難之后,以后飛機就停飛啦?技術流朋友,更加關注問題本身,有什么技術手段可以解決此類問題?對于這個問題,公說公有理婆說婆有理,元芳,你怎么看? `
2016-07-05 11:14:19
自動駕駛汽車是依靠人工智能、視覺計算、雷達、監控裝置和全球定位系統協同合作,讓電腦可以在沒有任何人類主動的操作下,自動安全地操作機動車輛。據前瞻產業研究院《中國無人駕駛汽車行業發展前景預測與投資
2019-04-03 05:36:06
最基礎的層面上建立安全機制,以應對任何潛在的問題。他們希望將其內置到半導體知識產權(IP)中,以確保半自動和全自動駕駛車輛的安全性并免受安全威脅。而作為汽車產業生態鏈里的一員,Imagination
2020-07-07 11:41:24
為什么視覺系統對自動駕駛至關重要?
2020-12-29 06:43:48
(3.3-4.9GHz、6-80GHz)、無線充電等等。這么多天線系統,在安裝時必須考慮汽車的擋風玻璃、金屬殼對無線信號的衰減影響,怎么破?新材料天線、與車體集成的天線將應運而生。總而言之,自動駕駛需要5G,5G
2020-06-08 07:00:00
從ADAS到自動駕駛還有多長的路要走看了就知道
2021-01-28 06:57:58
。在最初的幾代系統中,隨著車輛開始具備L2功能,各個傳感器系統獨立工作。這些預警系統誤報率較高,帶來了不少麻煩,因此經常被關閉。為了實現具有認知能力的全自動駕駛車輛,傳感器的數量將顯著增加。此外
2020-06-16 18:53:55
傳感器技術增添了哪些助力?作為汽車領域的業界翹楚,博世又將如何助推自動駕駛技術走向商用? 物聯網為汽車MEMS傳感器帶來重大利好 回溯傳感器的發展歷史,從上世紀80年代~90年代在汽車電子中應用是
2014-08-18 10:04:20
自動駕駛導論
2020-04-22 10:09:25
、衛星導航以及其他基站定位系統等。
基于目前市場上對自動駕駛系統的需求,墨翟科技研發了一款10.1英寸一體化的車載電腦,專為農業精耕、工程機械應用而設計的升級產品。該產品經過實際的農業耕種環境應用至今
2023-10-17 17:52:31
,即可快速、無縫地將激光雷達感知模塊嵌入到自己的無人駕駛方案中,真正實現“一鍵獲得自動駕駛激光雷達環境感知能力”。RS-BoxLiDAR感知算法專業硬件平臺RS-Box 由嵌入式硬件平臺、獨立操作系統
2017-12-15 14:20:48
帶來安全風險。低階的自動駕駛系統在緊急情況發生時,需要駕駛員能夠接管車輛。像特斯拉、日產、奧迪等汽車制造商,都將人類駕駛員作為他們備用的安全系統。他們的邏輯是:如果在危急的時候人類可以可靠地接管車輛
2017-04-08 11:17:59
地圖如何幫助自動駕駛汽車實現溝通?
2021-02-26 07:47:18
基于視覺的slam自動駕駛,這是我們測試的視頻《基于slam算法的智能機器人》調研分析報告項目背景分析機器人曾經是科幻電影中的形象,可目前已經漸漸走入我們的生活。機器人技術以包含機械、電子、自動
2021-08-09 09:37:34
從安全的角度看自動駕駛
2021-01-25 06:42:46
美好未來到來的更快。AI還在路測,黑客們的自動駕駛已經成熟了這一點并不是危言聳聽,在自動駕駛汽車還處在路測階段時,汽車黑客就已經能在地球另一端把你家汽車開走了。早在2015年的一場BlackHat大會上,就有
2020-10-22 07:45:38
自行車什么時候能實現「自己行走」呢?自行車屬于欠驅動系統,如果不進行控制就無法實現穩定站立最近,B站野生技術協會野生鋼鐵俠、「華為天才少年計劃」入選者、AI算法工程師稚暉君發布了一個「自動駕駛
2021-08-26 09:23:20
、雷達等多種傳感器,需要開發者和測繪企業、地圖企業一起合作。自動駕駛也離不開無線通信技術和云計算服務。比如智慧城市系統中,交通管理部門、汽車和駕駛員可以利用這些技術,實現智能導航,避免出現交通擁堵;三維
2019-05-13 00:26:37
及時發現前方車輛并作出反應。相比之下,在谷歌“無人駕駛”模式下,無人駕駛系統被視為“駕駛員”并對行車安全負完全責任,責任是非常清晰的。就可靠性而言,特斯拉公司同樣表示目前其自動駕駛(Autopilot)處于
2017-09-28 16:50:52
(報告出品方/作者:國金證券,翟煒)報告綜述產業鏈與市場空間:當前我國自動駕駛正處于 L2 向 L3 級別轉化的階段,預 計 2025 年 L2.5 級別自動駕駛車輛滲透率為 50%,2030 年
2021-08-27 07:21:36
請問各位老鳥我是新手汽車自動駕駛技術是怎么回事,是用什么板子開發的需要應用哪些技術和知識。提問題提得不是很好請各位見諒
2016-04-14 20:44:03
`科技的進步日新月異,要數在汽車圈子里最火熱的詞匯,自動駕駛輔助系統一定是位居榜單前列的,而自動駕駛中核心的硬件之一—激光雷達,也是屢屢被各家車企送上熱搜榜單,成為了業界內關注的重心。激光雷達被
2021-03-18 11:14:17
最近,我和我的一個朋友進行了一次有趣的討論,他知道我在研究用于ADAS系統和自動駕駛車輛(AVs)中雷達的TI毫米波(mmWave)傳感器。每當他讀到自動駕駛汽車在不同駕駛環境下(比如障礙物檢測
2022-11-09 07:48:50
展開測試。? 而在測試完成后,通用將會把自動駕駛版Bolt電動汽車投放到與Lyft一同打造的共享網絡中,至于一般家庭用戶,通用還沒有向他們進行銷售的意向。而與深陷各種泥沼的Uber不同,Lyft在
2017-06-14 18:34:08
測試自動駕駛功能,其中包括谷歌,百度,蘋果,特斯拉,福特等。但截至上個月底在加州的相關監管文件中顯示,騰訊方面尚未獲得自動駕駛汽車測試許可,同時官方也未對這一消息進行回應。事實上,早在2016年騰訊
2018-11-13 11:33:14
的技術創新的靈活架構非常重要。神經網絡在自動駕駛的應用第一批神經網絡應用程序將專注于視覺處理,以支持諸如自動行人、交通信號或道路特征識別等功能。由于這些系統的性能不斷改進,例如處理越來越大的來自高分辨率相機
2017-12-21 17:11:34
` 福特汽車近期展開「遠距遙控」半自動駕駛系統實測:只要一套如電玩游戲般的平價控制系統、三臺監控螢幕,車上再安裝幾個基本硬體設備,以及 4G LTE 的網路連線,就能把一輛遠在2400英里(約
2015-03-04 14:45:41
輔助系統系統)用到的技術重迭。自駕車如何看見世界為什么要這么多種傳感器?優缺點互補目前多數車商在量產車中配備的“自動駕駛”功能,包含特斯拉、Volvo、Mercedes-Benz、奧迪等,事實上就是搭載
2017-05-15 17:49:20
了3GPP R16 5G-V2X在自動駕駛業務方面帶來的技術優化,并對現階段通信技術中存在的問題進行了分析和展望。與此同時,闡述了通信技術在網聯自動駕駛領域的重要作用,期望加深輔助駕駛、智慧交通等產業
2021-01-12 15:42:00
隨著時代的演進與汽車工業技術、機器視覺系統、人工智能和傳感器相關技術上不斷創新與進步,無人自動駕駛汽車已不是一件遙不可及的夢想,Google與國際車廠相繼針對自動駕駛技術致力研究開發,進一步讓
2020-08-26 06:45:07
為什么視覺系統對自動駕駛至關重要?
2021-01-25 07:51:32
汽車正在快速演化成一臺安全聯網的自動駕駛機器人,能夠感測環境、進行思考并采取自主措施。變化更快的也許是小型自動駕駛公共車輛——出租車、拼車或公交車,能夠將我們從公共交通站、市中心或辦公區域帶到想去的地方(最后一公里)。有沒有更好的ADAS系統解決方案,對接口進行銜接?
2019-02-20 09:29:13
過程就涉及多項自動駕駛底層軟件技術,如內存動態分配、芯片運算能力、芯片實時監控策略。本文將針對這三方面內容進行詳細說明。 功能安全攔路虎:內存分配與訪問 在汽車電子系統的軟件開發標準中,強調需要保證
2022-11-09 16:09:04
基于樹莓派的人工智能自動駕駛小車
2020-11-25 07:22:30
激光雷達是如何產生的?激光雷達在自動駕駛領域有什么作用?
2021-06-17 07:31:54
看到新聞報道說谷歌自動駕駛汽車已經行駛近30萬公里了,非常的強大~~上次參加了重慶新能源汽車峰會,對會上富士通半導體宣講的一款全景視頻汽車實時監控技術平臺似乎看到了自動駕駛的影子(利用MB86R11
2011-06-14 16:15:27
通常無法做出及時有效的處理,單純依靠傳感器感知路面環境的自動駕駛也很難避免車禍的發生,但是車聯網通過基于兩輛車的數據分析,提前預知到“車禍”的可能性,對兩輛車完成協調,避免潛在事故發生。車輛網在近年來
2019-03-19 06:20:10
控制三部分。類似于人類駕駛員在駕駛過程中,通過視覺、聽覺、觸覺等感官系統感知行駛環境和車輛狀態,自動駕駛系統通過配置內部和外部傳感器獲取自身狀態及周邊環境信息。內部傳感器主要包括車輛速度傳感器、加速
2020-07-21 14:12:56
反應。處理速度的任何延遲都有可能是致命的。雖然聯網設備的數據處理現在主要是在云端進行的,但在中央服務器之間來回傳送數據可能需要幾秒鐘的時間。這一時間跨度太長了。邊緣計算則讓自動駕駛汽車...
2021-07-12 08:07:05
中,David和Pall探討了傳感器融合、人工智能和互聯及安全等關鍵技術可能如何促成自動駕駛汽車(AV)和電動汽車(EV)的未來的形成,和其他可能出現的趨勢。在整個演講中,兩位發言者談到了自動駕駛汽車
2018-10-25 09:01:17
、加速),但行動的動力是什么呢?盡管高級駕駛員輔助系統 (ADAS) 尚未在所有汽車中普及,但這些系統將在從駕駛汽車到汽車自動駕駛的演進過程中發揮至關重要的作用,因為它們相當于汽車的眼睛。需要部署各種廣泛
2018-09-14 11:03:54
本文主要闡述了自動駕駛系統原理及自動駕駛系統的結構。
2020-09-02 15:39:00 7897
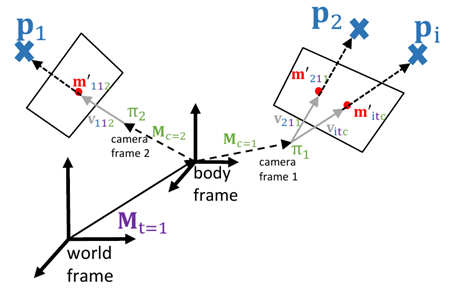
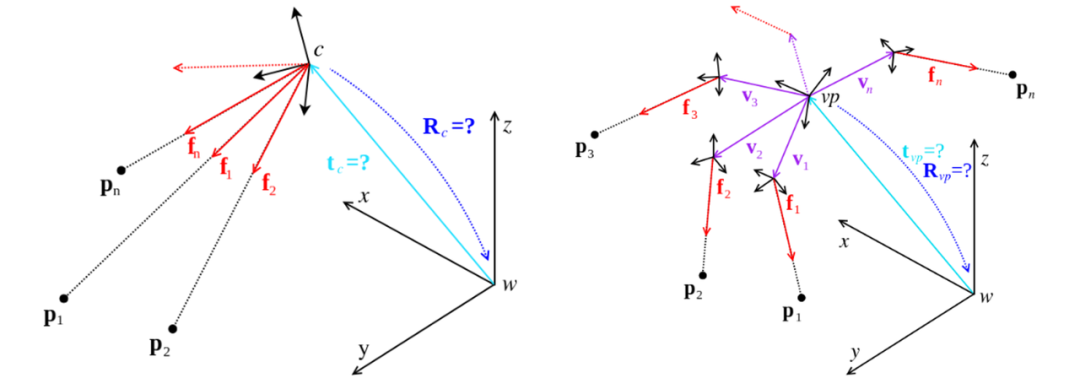
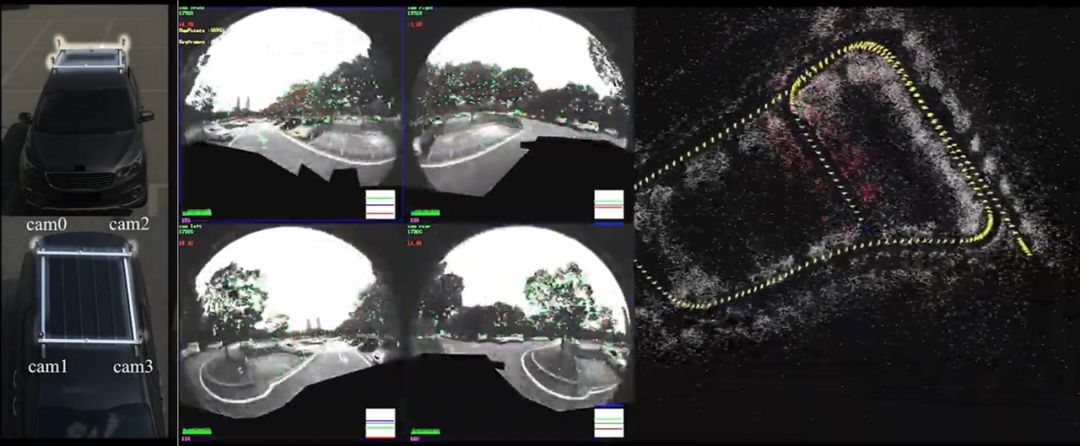
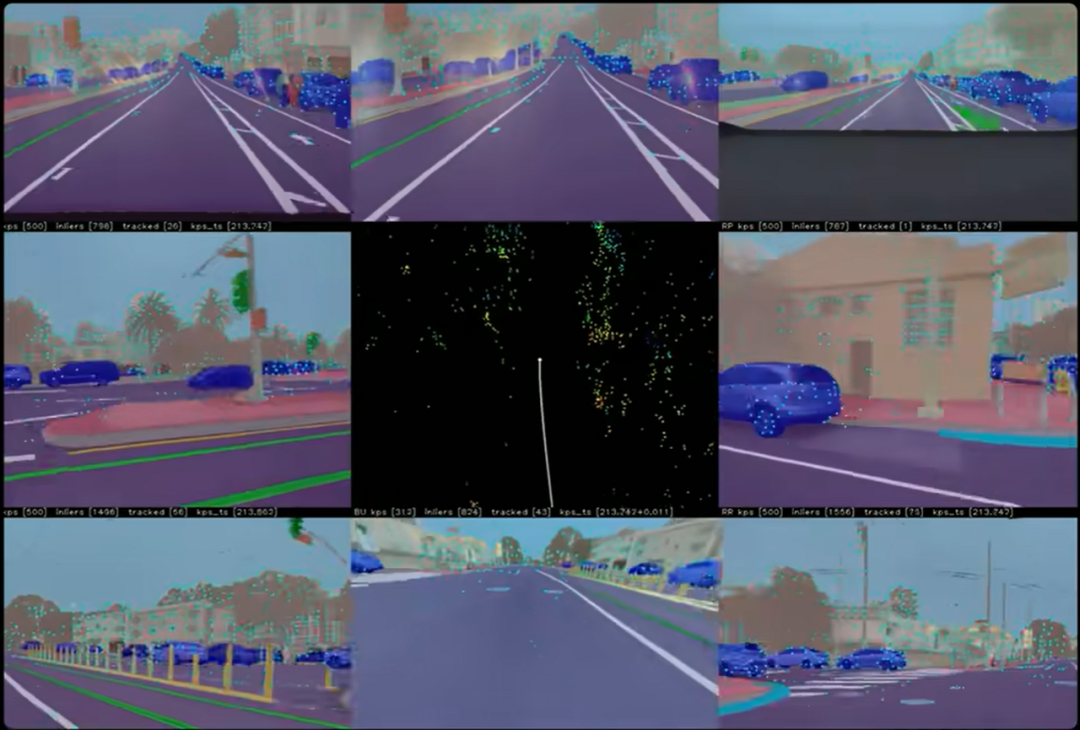
7897 在SLAM系統中增加更多的相機可以提高魯棒性和準確性,但會使視覺前端的設計變得非常復雜。因此,文獻中的大多數系統是為特定的相機配置定制的。在這項工作中,我們的目標是一個適用于任意多相機設置的自適應
2021-01-07 11:51:061792 自動駕駛汽車,又稱無人駕駛汽車,電腦駕駛汽車,或輪式移動機器人,是一種通過電腦系統實現無人駕駛的智能汽車,依靠人工智能、視覺計算、雷達、監控裝置和定位系統的協同合作,讓電腦可以在沒有任何人類主動
2022-02-07 10:43:266513 同時定位和映射(SLAM)是大多數自主系統所需的基本能力。在本文中,我們討論了基于自動駕駛汽車記錄的3D激光掃描的SLAM閉環問題。
2022-10-27 11:08:14774 和自動駕駛等。近幾年來,在汽車制造商的參與下,對智能汽車的關注進一步推動
了SLAM的研究工作。
全球導航衛星系統(GlobalNavigation Satellite System,GNSS
2023-06-02 14:25:22 2
2
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論