 電子發(fā)燒友App
電子發(fā)燒友App


01
PPP-RTK
PPP的定位精度、實時性在一眾專家的努力下,有了長足進步。但是,由于受相位偏差、對流層和電離層延遲等各種殘余誤差的影響,PPP固定解初始化時間仍沒有多大改善,少則也需要20分鐘左右才能實現(xiàn)固定。
為了進一步改善實時PPP定位的精度、可靠性和時效性,德國GEO++公司Wübbena博士等人在2005年首次正式提出了PPP-RTK的概念,其基本思想是融合PPP和RTK兩種技術(shù)的優(yōu)勢,利用已經(jīng)建立起來的密集基準站設施,精化求解相位偏差、對流層和電離層延遲等參數(shù),重新生成各類改正信息,并單獨播發(fā)給流動站使用,以此解決常規(guī) PPP定位中非差模糊度的快速固定難題,從而實現(xiàn)快速、準確定位。
PPP-RTK的一種可行的系統(tǒng)架構(gòu)如圖1所示。
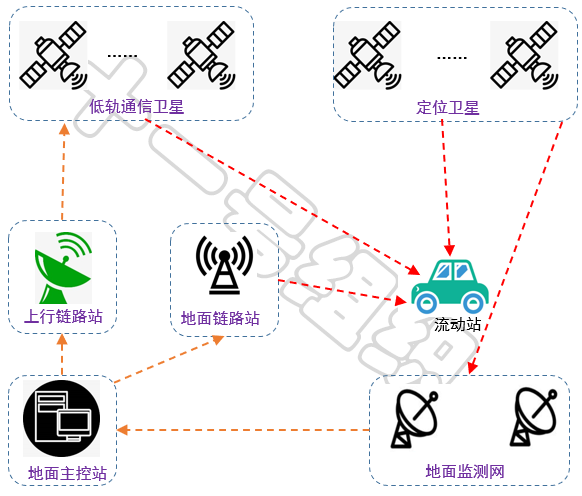
圖1 PPP-RTK的一種可行的系統(tǒng)架構(gòu)
與PPP架構(gòu)最顯著的區(qū)別是,地面主控站與流動站之間多了一條通信鏈路,而這條鏈路讓PPP-RTK具有如下兩大特點,一是極大地提高了PPP定位的精度和收斂的速度,二是拓展了網(wǎng)絡RTK的服務范圍。
PPP-RTK從觀測值層面實現(xiàn)PPP與RTK的“緊組合”,以一種更優(yōu)雅的方式解決了RTK“依賴于密集基準站資源,當多個CORS系統(tǒng)間存在覆蓋盲區(qū)時難以實現(xiàn)連續(xù)服務”的問題。這意味著在基準站覆蓋的區(qū)域,PPP-RTK和RTK相差不大,但是在基準站無覆蓋的區(qū)域,PPP-RTK可以降級為PPP使用,獲得不俗的定位精度。
這樣的特性恰好是自動駕駛功能完好性功能安全層面所期待的:
(1)功能完好性:PPP-RTK的各類改正數(shù)是分開解算的,可以獨立評估,從而較容易實現(xiàn)完好性監(jiān)控,更能夠匹配智能駕駛在功能安全方面的需求;
(2)功能安全:讓失效變得緩慢,緩慢地讓車內(nèi)用戶有時間接管,緩慢地讓最小風險策略可以從容地執(zhí)行。
但是PPP-RTK畢竟還是丟掉了PPP定位不依賴于密集基準站的支持這一獨特優(yōu)勢,如何在不采用基準站來增強,實現(xiàn)非差模糊度的快速初始化,是業(yè)界面臨的共同難題,也是PPP-RTK/PPP未來研究的重點。
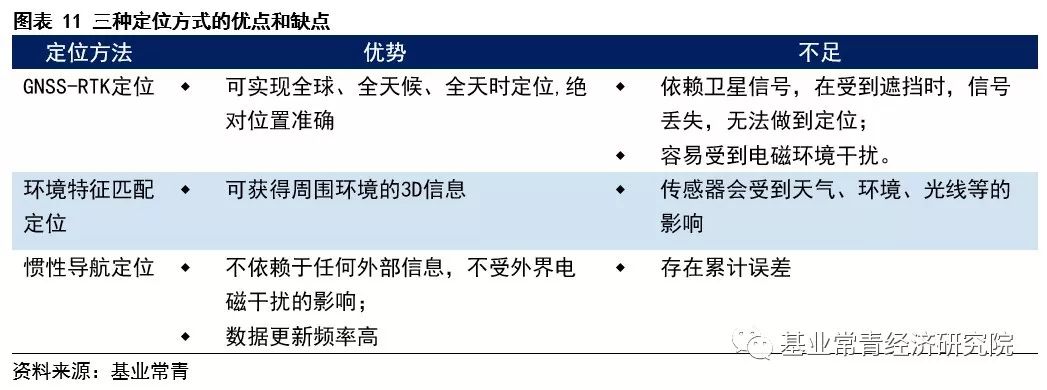
下面匯總PPP、RTK、PPP-RTK三者之間的性能對比,如表1所示。
表1 PPP、RTK、PPP-RTK三者之間的對比

02 PPP-RTK服務介紹 ? 一、國外
(1)Hexagon/NovAtel——TerraStar服務
說起Hexagon,行業(yè)內(nèi)很多人可能要反應個幾十秒,但提到NovAtel,估計很多人會脫口而出:這不就是那個一套接收機賣十幾二十萬的公司嗎!
NovAtel,這樣一家,創(chuàng)造了衛(wèi)星定位和校正技術(shù)先河的先驅(qū)公司,2008年以3.9億美元賣給了Hexagon,這在當時讓很多人唏噓不已。
TerraStar服務是Hexagon/NovAtel基于全球100多個基準站數(shù)據(jù),提供的全球高質(zhì)量實時改正服務,該服務提供的改正信息通過5顆地球同步衛(wèi)星(L波段)或網(wǎng)絡進行廣播傳輸,根據(jù)其作用范圍和性能,可分為TerraStar-L、TerraStar-C、TerraStar-C PRO與TerraStar-X服務。
TerraStar-C PRO是Hexagon/NovAtel首次采用其新開發(fā)的RTK from the sky精密單點定位技術(shù)的全球改正服務,可提供包括更高采樣率的衛(wèi)星軌道和衛(wèi)星鐘差改正等信息,同時也可以實現(xiàn)模糊度的快速整數(shù)固定。
TerraStar-C PRO改正服務,官方介紹具有厘米級定位精度、最快3分鐘實現(xiàn)收斂以及全球范圍可用等優(yōu)勢,是目前世界上收斂時間最短的全球改正服務。
而TerraStar-X是在TerraStar-C PRO基礎上發(fā)展而來的區(qū)域改正服務,相較于后者的全球可用性,TerraStar-X側(cè)重在區(qū)域性運用(主要為美國部分地區(qū)),可實現(xiàn)厘米級定位精度和優(yōu)于1分鐘的收斂時間。
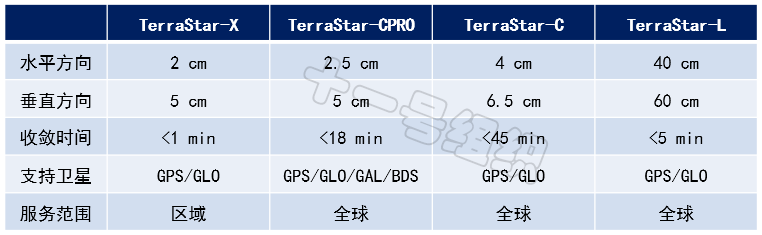
TerraStar各項服務精度指標如表2所示。
表2 TerraStar各項服務精度指標
(2)Trimble——RTX Fast服務
Trimble公司成立于1978年,RTK接收機之父Javad Ashjaee在這里搞出了全世界第二個商用接收機4000A,RTK算法之父Benjamin Remondi也在這里挑燈夜戰(zhàn)過,他們共同成就了Trimble在20世紀末到21世紀初這段時間在衛(wèi)星定位領域的霸主地位。
Trimble在2011年推出星基增強系統(tǒng),2015年升級了區(qū)域電離層模型,支持現(xiàn)在常說PPP-RTK定位,其相對常規(guī)的PPP定位最大優(yōu)點就是收斂時間短、固定快,所以取了個名字叫RTX Fast。
RTX Fast利用全球監(jiān)測網(wǎng)來計算精確的衛(wèi)星軌道和衛(wèi)星鐘差,并將改正信息實時通過地球同步衛(wèi)星(l波段)或網(wǎng)絡進行廣播,移動站收到改正信息后進行位置估計,具體采用的策略包括如下幾條。
(a)用數(shù)學模型精確地模擬誤差源,或者使用全球或者區(qū)域網(wǎng)絡數(shù)據(jù)進行誤差估計。
(b)衛(wèi)星軌道誤差沒有在全球或區(qū)域網(wǎng)絡中建模,因為使用Trimble實時精確軌道或IGS超快速軌道產(chǎn)品可以更好地對衛(wèi)星軌道進行建模。
(c)區(qū)域網(wǎng)絡中建立衛(wèi)星鐘差模型,以吸收區(qū)域內(nèi)出現(xiàn)的剩余軌道誤差。
(d)其他偏差則估計為小數(shù)部分,以保持載波相位觀測值的整數(shù)特性。
(e)RTX Fast服務器平均化處理來自基準站的載波和偽距觀測的多路徑和測站噪聲。
(f)RTX Fast生成的產(chǎn)品和改正信息以Trimble的CMRx壓縮數(shù)據(jù)格式,通過地球同步衛(wèi)星L波段或網(wǎng)絡實現(xiàn)實時傳輸。
(g)移動通過接收衛(wèi)星/網(wǎng)絡廣播的RTX Fast校正信息,并與所有其他GNSS衛(wèi)星信號一起,實時計算其精確位置。
以上策略也讓RTX Fast可以實現(xiàn)2-50cm水平定位精度、5cm的垂直定位精度,同時快速模式下收斂時間優(yōu)于1分鐘,而常規(guī)模式下收斂時間優(yōu)于20分鐘。
(3)u-blox——PointPerfect服務
u-blox是車載衛(wèi)星定位芯片和模組領域的出貨量霸主,其主機廠朋友遍布世界各地,其為瑞士的高福利立下了汗馬功勞。
PointPerfect是u-blox面向大眾應用推出的GNSS增強數(shù)據(jù)服務,可通過衛(wèi)星信號或網(wǎng)絡向流動站廣播,并使流動站在短時間內(nèi)實現(xiàn)優(yōu)于10厘米的定位精度。
PointPerfect采用行業(yè)標準的SPARTN消息格式,輔以輕量級和安全的MQTT物聯(lián)網(wǎng)傳輸協(xié)議,使其成為一個實時高效、低帶寬、高性價比的解決方案,非常適合于大眾市場應用。
PointPerfect服務范圍覆蓋歐洲和美國大陸區(qū)域,包括距離海岸線12海里(約22公里)以內(nèi)的區(qū)域。目前僅支持增強GPS(L1C/A,L2,L2C,L5)、Galileo(E1、E5a/b)和GLONASS(G1 C/A,G2 C/A)系統(tǒng)。
PointPerfect主要提供以下兩類產(chǎn)品。
(a)衛(wèi)星軌道、衛(wèi)星鐘差、硬件延遲偏差:其中衛(wèi)星鐘差的更新間隔為5s,衛(wèi)星軌道和硬件延遲的更新間隔為30s。
(b)大氣改正產(chǎn)品:包括VTEC模型、傾斜電離層延遲改正和天頂對流層延遲改正,其更新頻率同樣為30s。
在GNSS觀測數(shù)據(jù)無粗差、數(shù)據(jù)接收完整且有連續(xù)的改正數(shù)據(jù)且模糊度正確固定的情況下,PointPerfect在水平方向定位精度可以達到3-6 cm(95%置信區(qū)間)。而模糊度的初始化時間則會隨電離層活動而變化,一般小于30 s。
(4)QZSS——CLAS服務
準天頂衛(wèi)星系統(tǒng)(Quasi-Zenith Satellite System,QZSS)是日本政府在2002年授權(quán)建立,2018年正式開始工作的一個區(qū)域增強衛(wèi)星定位系統(tǒng)。
QZSS目前采用三顆傾斜地球同步軌道衛(wèi)星(Inclined GeoSynchronous Orbit,IGSO)?和一顆地球同步軌道衛(wèi)星(Geosynchronous Orbit,GEO)衛(wèi)星組成。
由于日本國土位于中高緯度地區(qū),這樣衛(wèi)星星座設計使得在任意時刻能保證至少有1顆衛(wèi)星能位于該國天頂方向(高度角大于60),所以被稱作準天頂衛(wèi)星系統(tǒng)。
QZSS基于L6頻段上的L6D信號播發(fā)增強信息,實現(xiàn)PPP-RTK增強服務——CLAS(Centimeter Level Augmentation Service)。L6D增強信息可以通過兩種方式獲得,一是通過支持CLAS的接收機接收,二是可以在QZSS官方網(wǎng)站上下載事后的增強電文。
CLAS服務范圍為日本境內(nèi),在日本境內(nèi)將服務分為12個網(wǎng)絡,服務范圍及12個網(wǎng)絡分布如圖2所示。
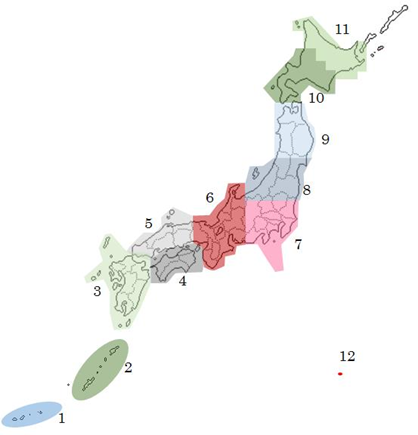
圖2 QZSS服務范圍及網(wǎng)絡分布
地面基準站網(wǎng)由日本境內(nèi)的1300多個CORS中的212個組成,站點間的間隔約為60 km。這些基準站的主要作用是接收GNSS衛(wèi)星的原始觀測數(shù)據(jù)并通過網(wǎng)絡發(fā)送至數(shù)據(jù)處理中心,數(shù)據(jù)處理中心通過網(wǎng)解得到衛(wèi)星的軌道、鐘差、碼偏差、大氣等信息,并將這些數(shù)據(jù)注入衛(wèi)星或通過通信網(wǎng)絡播發(fā)給用戶,用戶接收到這些改正信息后即可進行PPP-RTK定位。在進行數(shù)據(jù)播發(fā)時,電離層和對流層均以格網(wǎng)的形式播發(fā)。
目前CLAS服務僅支持GPS(L1C/A,L1C,L2P,L2C,L5)、Galileo(E1B,E5a)和QZSS(L1C/A,L1C,L2C,L5)系統(tǒng),未來將支持GLONASS和BDS系統(tǒng)。
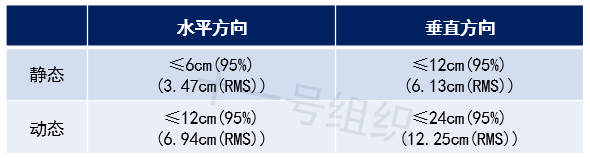
在所有被增強的衛(wèi)星都用于PPP-RTK定位、沒有周跳的衛(wèi)星數(shù)大于等于5、衛(wèi)星截止高度角設為15度等條件滿足后,CLAS服務可達到的定位精度如表3所示。模糊度固定時間在95%置信區(qū)間一般小于等于60s。
表3 CLAS服務定位精度
二、國內(nèi)
國內(nèi)染指PPP-RTK領域的有千尋位置、六分科技、大有時空、時空道宇等,各家產(chǎn)品各有千秋,下文基于官網(wǎng)信息簡介幾個產(chǎn)品。
(1)六分科技
2023年4月18日,六分科技在上海車展期間發(fā)布PPP-RTK新品“星璨”,產(chǎn)品架構(gòu)如圖9所示。
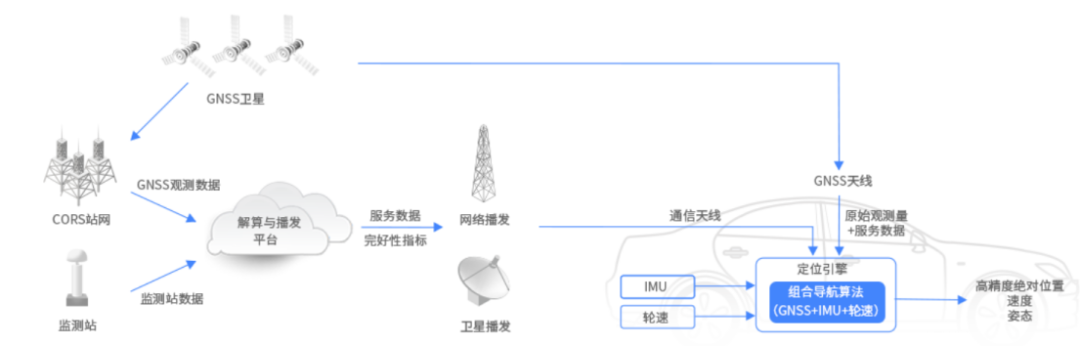
圖9 六方科技PPP-RTK新品“星璨”
官網(wǎng)只介紹了其具有實施車道級定位、億級用戶并發(fā)、適配車規(guī)級芯片、功能安全、高連續(xù)性、高穩(wěn)定性等特點,但具體性能參數(shù)如何,未對外公布。
(2)大有時空
2023年1月4日,大有時空正式發(fā)布PPP-RTK產(chǎn)品,官方介紹產(chǎn)品定位精度可達2cm,收斂速度可達30秒。
目前有兩種模式為終端用戶提供高精度定位服務,一種是大有時空定位平臺通過賬號直接播發(fā)給終端用戶,二是大有時空定位服務轉(zhuǎn)發(fā)至戰(zhàn)略合作伙伴播發(fā)服務平臺,由合作伙伴服務平臺播發(fā)給終端用戶。
而通過和海克斯康集團合作(海克斯康負責北美、歐洲的CORS網(wǎng)建設和數(shù)據(jù)中心的獨立運維,大有時空負責中國的CORS網(wǎng)建設和數(shù)據(jù)中心的獨立運維),大有時空的PPP-RTK產(chǎn)品可為全球用戶提供服務。
(3)時空道宇
提到時空道宇,就不得不提“一箭九星”,2022年6月2日,吉利未來出行星座首軌九星在西昌衛(wèi)星發(fā)射中心以一箭九星方式成功發(fā)射。
根據(jù)時空道宇的技術(shù)說明,此次發(fā)射的九顆衛(wèi)星,搭配時空道宇已經(jīng)建設完成的地基PPP-RTK時空信息網(wǎng)絡,以及北斗三號模組、終端產(chǎn)品,可以實現(xiàn)遙感、導航、通信技術(shù)的融合應用,為未來出行提供立體化保障。
所以時空道宇PPP-RTK產(chǎn)品的與其他產(chǎn)品的最大不同將是:擁有自己的播發(fā)衛(wèi)星,而其他家只能租用播發(fā)衛(wèi)星。
03 寫在最后
技術(shù)收斂是技術(shù)大規(guī)模落地的前提,真心期望PPP-RTK能盡快統(tǒng)一高精定位領域,為自動駕駛的量產(chǎn)落地貢獻一份力量。
編輯:黃飛
?










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論