 電子發燒友App
電子發燒友App


豐田第二代混合動力系統(THS-Ⅱ),機械構造之精妙,控制策略之嚴謹,可謂獨步全球,其核心競爭力就在于動力分配行星齒輪機構——Power Split Device(PSD)。從字面上簡單理解,該機構就是將發動機的動力重新進行了分配,但從嚴格意義上來闡述,這套機構的精髓就是將發動機的輸出功率進行分流。如此天馬行空,腦洞大開的設計理念早在1997年第一代普銳斯上市前,豐田就對其申請了知識產權專利,這一舉措對當時乃至今日想致力于混合動力技術的各大汽車廠商來說都套上了一層無形枷鎖。
各大汽車廠商為了能夠繞開豐田的專利,想方設法研究屬于自己的混合動力方案,但是時間證明,目前還沒有更好的混合動力方案能從燃油利用率、性能品控、客戶體驗等各個維度上超越THS-Ⅱ。為什么看上去如此簡單的PSD竟能如同藝術品般迸發出無與倫比的科技魅力并且歷久彌新?下面筆者對搭載全新A25B阿特金森循環發動機和P710 E-CVT型混合動力變速器的全新Lexus ES300h車的動力傳遞路徑進行闡述。
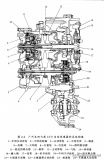
全新Lexus ES300h車的P710 E-CVT型混合動力變速器(圖1)由油泵、發電機(MG1)、PSD(太陽齒輪、行星齒輪、齒輪架、齒圈、輸入軸)、中間軸主動齒輪(復合齒輪)、中間軸從動齒輪、減速主動齒輪、減速從動齒輪、電動機(MG2)及MG2減速器等部分組成,其中復合齒輪與PSD中的齒圈及中間軸主動齒輪集成于一體。
PSD可將發動機輸出功率分為兩路,一路是將發動機輸出功率輸出至驅動車輪;另一路是將發動機輸出功率輸出驅動MG1運轉,使MG1作為發電機運行,MG1產生的交流電通過絕緣雙柵晶體管后傳輸給MG2,使MG2作為電動機運行。MG2產生的動力通過MG2減速器傳輸至中間軸從動齒輪,從而驅動減速主動齒輪運轉,最終通過減速從動齒輪傳遞給差速器后將動力輸出至驅動車輪。
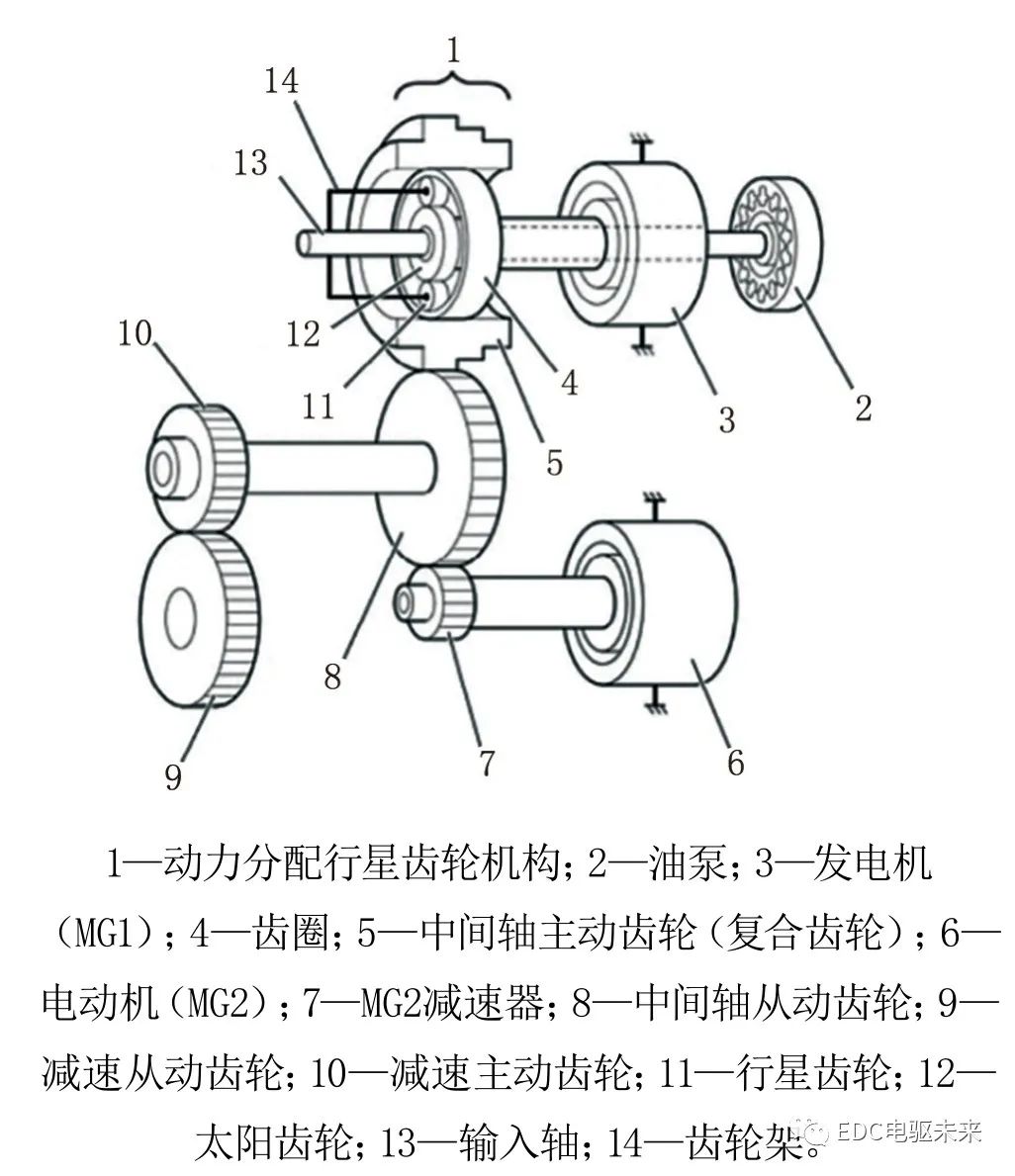
圖1 P710 E-CVT型混合動力變速器
THS-Ⅱ在P710 E-CVT型混合動力變速器的加持下,能夠提供更加完善的駕駛體驗,THS-Ⅱ是一套標準的PSD系統,通過PSD將發動機、MG1、MG2組合在一起,MG2與PSD的輸出端相連接,這就意味著MG2與PSD的輸出端永遠保持同速運轉,這將使MG2只起到調節轉矩的作用。MG1與PSD的太陽齒輪相連接,當MG1以不同方向、不同轉速旋轉時,處于齒輪架端的發動機與處于齒圈端的MG2之間就會出現不同的傳動比,從而實現調節速度的目的。MG1在調節速度的過程中,也會輸出一部分轉矩,只是MG1的主要功能還是調節速度,順帶與MG2一起調節轉矩,此外,MG1還肩負著行駛中“拽起”發動機和車輛停止時起動發動機的任務。
混合動力車輛控制ECU(HV-ECU)通過換擋桿位置、加速踏板行程及車速計算駕駛人請求輸出功率,再根據冷卻液溫度、高壓動力電池充電狀態、高壓動力電池溫度、電氣負載及系統損耗計算發動機輸出功率,再結合A25B阿特金森循環發動機萬有特性圖標定的發動機最佳工作曲線與發動機輸出功率曲線計算出發動機最佳工作狀態(節氣門開度及發動機轉速),進而確認發動機燃油噴射、點火控制、ETCS-i(電子節氣門控制)、VVT-i(智能配氣相位)等狀態,從而實現發動機輸出功率下最佳燃油利用率。
當高壓動力電池不處于工作狀態,并保持加速踏板恒定行程的情況下,根據能量守恒定律,發動機的輸出功率應等于車輛的驅動功率,發動機的輸出功率施加作用在PSD機構的齒輪架上,根據HV-ECU內存儲的最佳控制策略(圖2),將發動機輸出功率優化分配給MG1及驅動車輪。發動機運行狀態下,換擋桿位于D擋,當車輛剛要起步時,發動機輸出功率分配給MG1(發電機)的發電功率所占發動機輸出功率的份額最大(MG1正向負轉矩運轉,正向轉速最高,負轉矩最小)。因MG1產生的交流電通過絕緣雙柵晶體管傳輸給MG2用作驅動,故MG1的發電量取決于MG2的用電量(即MG1發電功率=MG2用電功率),此時MG2(電動機)的驅動轉矩最大,轉速最低(趨近于0 r/min),發動機輸出功率的剩余部分則被分配到驅動車輪,此時分配給驅動車輪的份額最小,作用在驅動車輪上的驅動力最低。
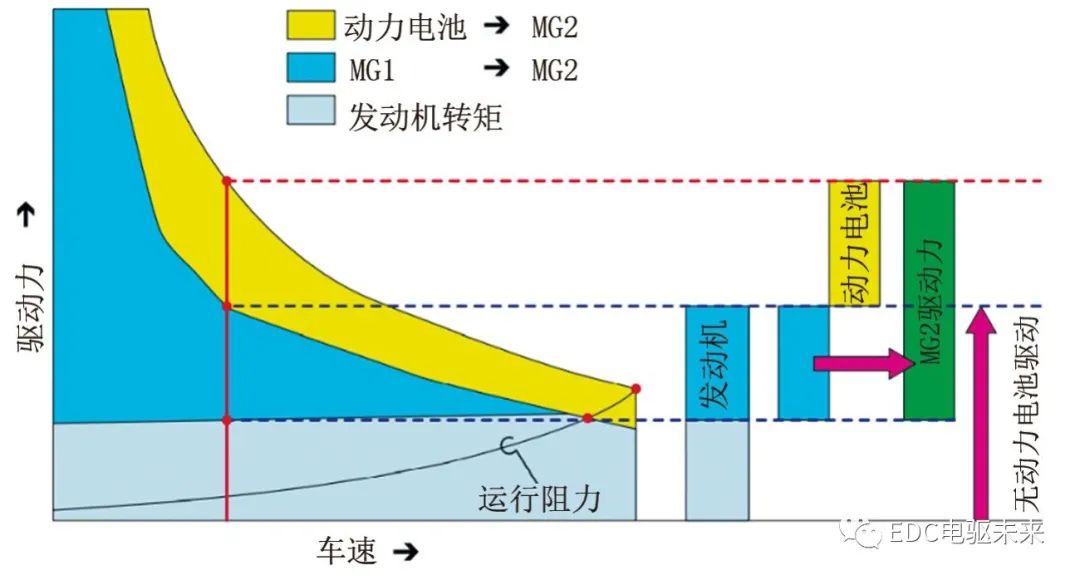
圖2 HV-ECU內存儲的最佳控制策略
隨著車速的逐步增加,發動機輸出功率分配給MG1(發電機)的份額逐漸減少,MG1旋轉速度逐步下降,負轉矩逐步上升,發電功率逐步減小,但輸出至驅動車輪的驅動功率卻逐步增加。當車輛達到一定車速時,MG1的轉速逐步趨近于0 r/min,其用作發電的負轉矩達到最大,被分配到的發動機輸出功率最少,發電功率最低(趨近于0 kW),MG1發電功率=MG2用電功率,MG2此刻的用電功率達到最低(趨近于0 kW),但發動機的輸出功率分配至驅動車輪上的份額最大,施加在驅動車輪上的驅動功率近乎等于發動機的全部輸出功率。
因MG1轉速趨近于0 r/min,負轉矩最大,通過PSD杠桿作用原理,此刻直接施加在驅動車輪上的驅動力達到最大,因其驅動力大于行駛阻力,所以車輛此刻仍處于加速行駛狀態。為了滿足連續可變無級傳動的控制策略,在保持發動機輸出功率不變的前提下,傳動比的大小需連續無級改變,這就意味著隨著車速的進一步提升,驅動車輪上的驅動力會隨之減小。對此豐田給出的解決方案是讓MG2(發電機)正向負轉矩運轉,用來持續抵消作用在驅動車輪上多余的驅動力,MG2產生的交流電通過絕緣雙柵晶體管轉化成交流電后傳輸給MG1,MG1(電動機)反向負轉矩運轉(MG1用電功率=MG2發電功率),從而使車速得以提升。此種方法所達到的效果近乎于改變傳動比。
當MG2剛作為發電機時,抵消驅動車輪上的驅動力用作發電的負轉矩最小,但其轉速較高,MG1(電動機)的轉速雖趨近于0 r/min,但此刻的負轉矩最大。隨著車速的增加,MG2抵消驅動車輪上的驅動力越來越多,其轉速越來越高,發電功率也越來越大,MG1的用電功率大小雖與之前保持一致,但隨著MG1轉速的不斷增加,負轉矩越來越小,直至驅動車輪上的驅動力與行駛阻力相等,車速達到最高,整個過程是一個加速度越來越小的加速并最終勻速行駛的過程。借助MG2的調節轉矩功能和MG1的調速功能,實現最佳發動機轉矩和轉速不變的前提下通過連續可變的無級傳動,最終達到驅動力與行駛阻力的完美平衡,因此,在后期的勻速行駛中,發動機內部所受的合外力不變,故發動機可以一直保持在同等輸出功率下最高燃燒效率的發動機工作線上運行。
簡而言之,THS-Ⅱ是通過MG1、MG2及動力電池組成的電控系統,為發動機調節輸出功率。如果車輛行駛功率需求小于發動機輸出功率,則通過行駛充電的方式將發動機輸出的一部分功率轉化為電能存儲到動力電池中;當車輛行駛功率需求大于發動機輸出功率,則通過油電混合方式驅動車輛;當車輛處于走走停停這種低功率需求時,為節省燃油消耗,就直接采用純電動驅動的方式。
THS-Ⅱ根據車輛不同的行駛狀態(圖3,READY-on狀態、起步狀態、定速巡行狀態、節氣門全開加速狀態、減速狀態、倒車狀態)對發動機、MG1、MG2的運轉進行優化組合,使車輛能夠保持高效行駛。
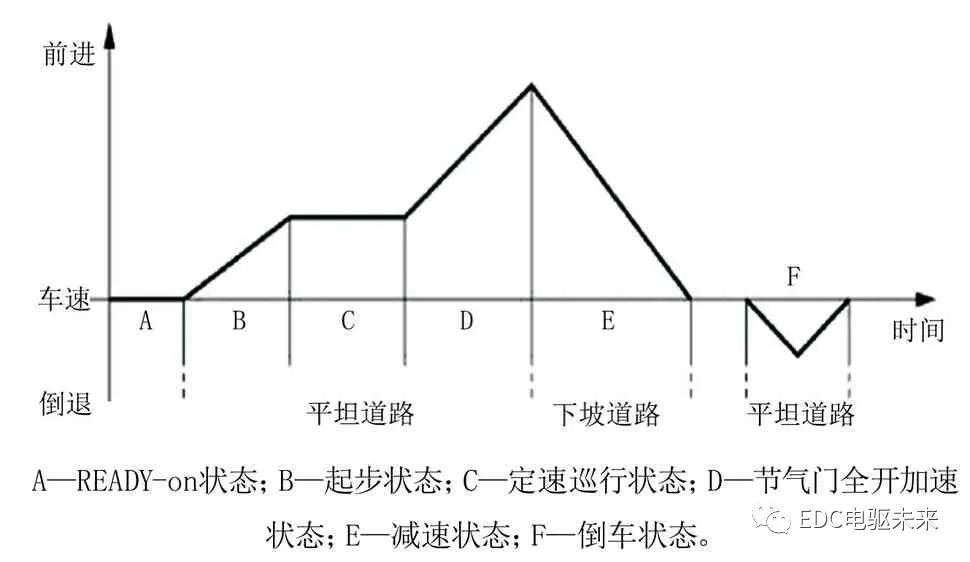
圖3 車輛的行駛狀態
在列線圖(圖4)中,直線用于表示PSD中太陽齒輪、行星齒輪及齒圈的旋轉方向和轉速之間的關系。太陽齒輪、行星齒輪、齒圈的轉速大小以距離0 r/min的遠近表示;“+”表示正向旋轉,“-”表示負向旋轉。
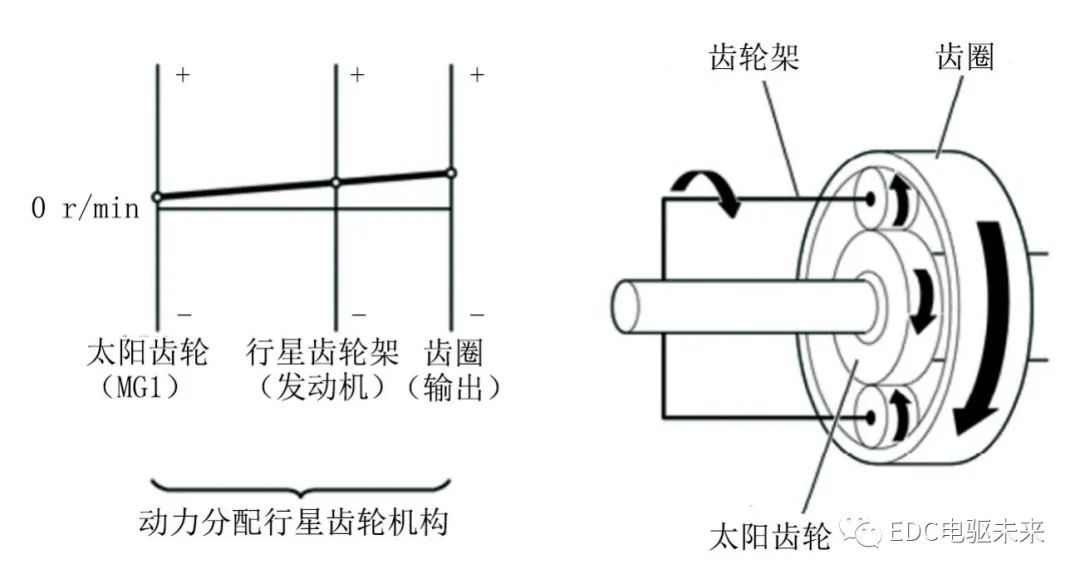
圖4 列線圖
在THS-Ⅱ中,MG1與MG2根據旋轉方向和轉矩之間的關系變化,可作為發電機或電動機使用,由于MG1與PSD中太陽齒輪相連接,當太陽齒輪正向旋轉時,就代表MG1正向旋轉,同理MG2的旋轉方向也與齒圈的旋轉方向相同。當MG1/MG2正向負轉矩旋轉時,就是作為發電機使用;當MG1/MG2反向負轉矩旋轉時,就是作為電動機使用。下面從各個行駛狀態詳細闡述全新Lexus ES300h車的P710 E-CVT型混合動力變速器動力傳遞路徑。
1 READY-on狀態 ?
READY-on狀態下(圖5),MG1(發電機)起動發動機,此時MG2(電動機)施加正轉矩以抵消發動機的反作用力,從而防止驅動車輪轉動。
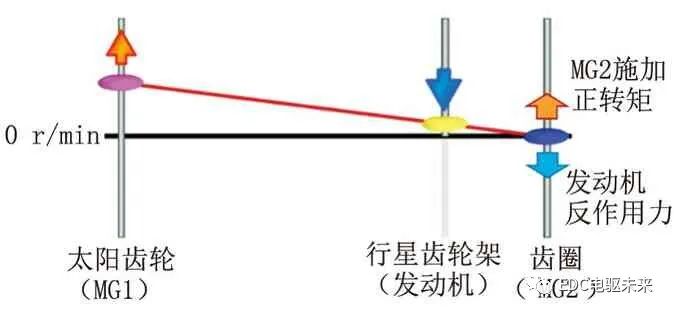
圖5 READY-on狀態下列線圖
如果高壓動力電池的電池荷電狀態(SOC)不足,則發動機驅動MG1(發電機)為其充電。當車輛停止時,MG2(電動機)施加負轉矩以抵消發動機直接輸出到齒圈上的轉矩,從而防止驅動車輪轉動。
2 起步狀態 ?
如圖6所示,當高壓動力電池SOC充足時,車輛起步并僅使用MG2(電動機)驅動車輛行駛,當車輛低速運行時,由于發動機連接車軸具有很強的旋轉阻力,齒輪架的轉速為0 r/min。此時,MG1未產生任何轉矩,因此太陽齒輪也沒有被施加任何轉矩,太陽齒輪負向旋轉(自由旋轉)以平衡齒圈的旋轉。
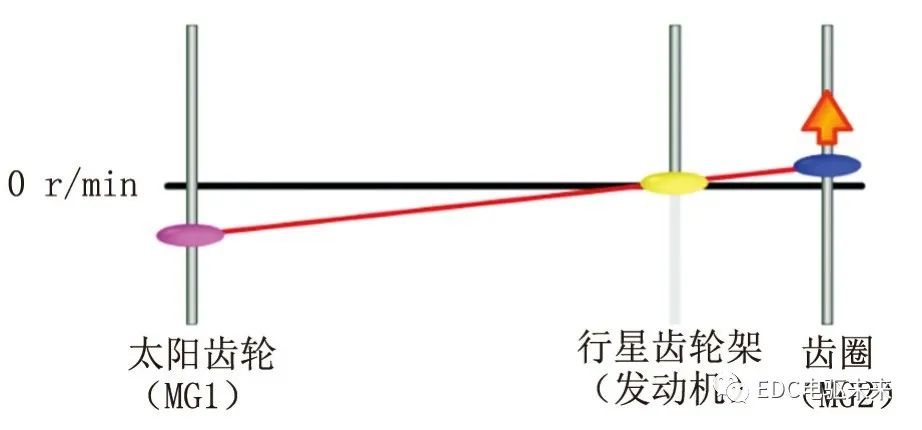
圖6 起步狀態列線圖
當高壓動力電池SOC不足時,發動機驅動MG1(發電機)為高壓動力電池充電,同時也為MG2(電動機)提供動力。在此狀態下行駛時,發動機輸出功率一路輸出至驅動車輪;另一路是將發動機輸出功率輸出驅動MG1運轉發電,MG1產生的交流電通過絕緣雙柵晶體管傳輸給MG2,使MG2作為電動機運行。MG2產生的動力通過MG2減速器傳輸至中間軸從動齒輪,從而驅動減速主動齒輪運轉,最終通過減速從動齒輪傳遞給差速器后將動力輸出至驅動車輪。
3 定速巡行狀態 ?
車輛在輕負載和定速巡行狀態下行駛時(圖7),發動機將在最高效的燃燒范圍內工作,為車輛提供動力。發動機帶動MG1(發電機)發電,MG1產生的交流電通過絕緣雙柵晶體管傳輸給MG2,使MG2作為電動機運行。MG2產生的動力通過MG2減速器傳輸至中間軸從動齒輪,從而驅動減速主動齒輪運轉,最終通過減速從動齒輪傳遞給差速器后將動力輸出至驅動車輪。
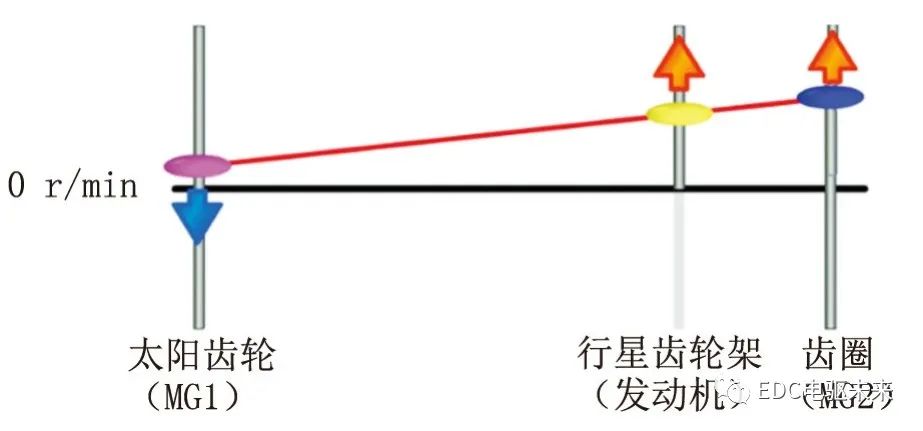
圖7 定速巡行狀態列線圖
車輛在輕負載中速狀態下行駛時(圖8),發動機帶動MG1(發電機)發電,MG1正向負轉矩旋轉,通過PSD的杠桿作用,將用作發電的負轉矩放大至2.75倍后,直接輸出至齒圈,因其足以使驅動車輪運轉且遠高于此時驅動車輪的驅動力,MG2(發電機)發電以削減額外產生的驅動車輪上的驅動力,此時MG1與MG2都用作發電機為高壓動力電池及車身電氣設備供電。
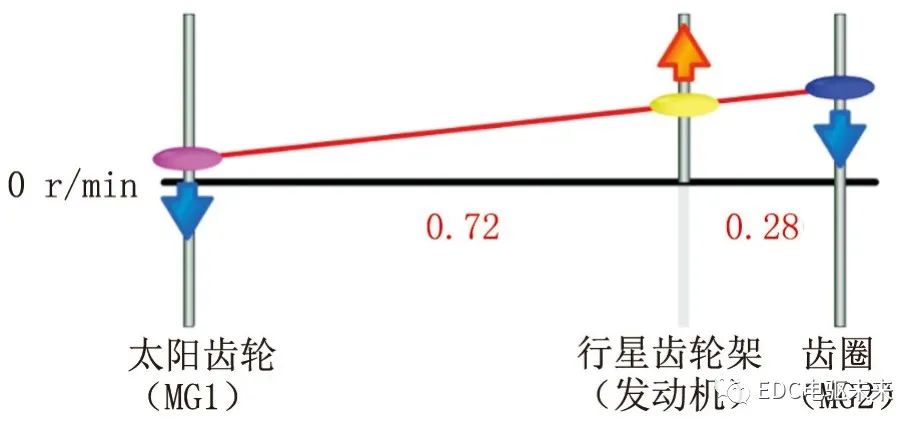
圖8 輕負載中速狀態下列線圖
車輛在平坦路面、低負載高速狀態下行駛時(圖9),在保持發動機輸出功率不變的情況下,HV-ECU繼續執行該工況下的車輛無級變速控制策略,隨著車速的提升,車速與驅動力呈現反比例線性交替變化(車速越高,驅動力越低),此時MG2(發電機)發電以削減額外產生的驅動車輪上的驅動力,削減的比例隨著車速的提升逐步增長,這也間接引起了MG2的發電功率逐步增長,MG2產生的交流電通過絕緣雙柵晶體管傳輸至MG1(電動機),MG1反向負轉矩旋轉,以拉升齒圈的轉速,此時MG1的用電功率等于MG2的發電功率且與MG2的發電功率的增幅大小一致。

圖9 平坦路面、低負載高速狀態下列線圖
起初MG1的驅動轉矩最大,轉速最低,但隨著MG1反向旋轉速度的提升,負轉矩逐步減小,車輛一直處于加速度不斷減小的加速行駛狀態,直至被削減后的驅動車輪上的驅動力與行駛阻力達到平衡,車輛實現勻速行駛。此刻MG1的用電功率達到最大。整個過程中,通過連續可變的無級傳動,在最終達到勻速行駛后,始終將任一發動機的輸出功率鎖定在最佳發動機運行工作線上,保持等功率線上最高燃燒效率的發動機的轉矩和轉速,以求整車的最佳動力性和最低燃油消耗率。
4 節氣門全開加速狀態 ?
車輛行駛狀態從定速巡行變為節氣門全開加速狀態時(圖10),高壓動力電池給MG2(電動機)提供電能,發動機繼續帶動MG1(發電機)發電,從而產生一個負轉矩,通過PSD的杠桿作用,直接將發動機的部分輸出功率輸出至驅動車輪上,同時施加在MG1上的負轉矩產生交流電通過絕緣雙柵晶體管傳輸到MG2(電動機)上驅動。
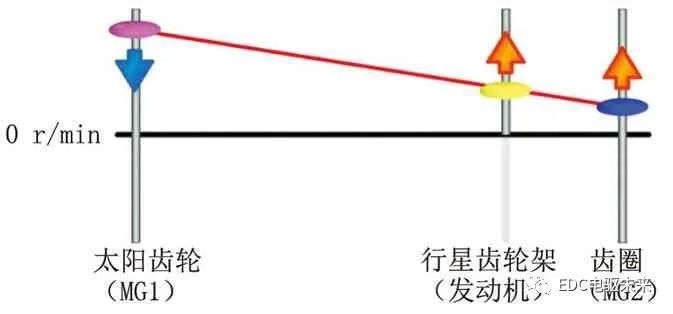
圖10 節氣門全開加速狀態列線圖
當高壓動力電池SOC充足且加速踏板完全踩下時(圖11),HV-ECU繼續執行該工況下的車輛無級變速控制策略,MG2(電動機)自始至終使用高壓動力電池提供的電能以補償車輪上的驅動力。隨著車速的增加,MG1(發電機)正向負轉矩的旋轉轉速逐步降低,MG1產生的電能通過絕緣雙柵晶體管傳輸至MG2(電動機)的功率也逐步下降,但MG1的負轉矩卻隨著旋轉轉速的逐步降低而呈增長趨勢(即發動機直接輸出至車輪上的輸出功率逐步增長),直至MG1的轉速趨近于0 r/min時,MG1產生的交流電通過絕緣雙柵晶體管傳輸至MG2(電動機)的功率最小(趨近于0 kW),發動機分配給驅動車輪的輸出功率達到最大。
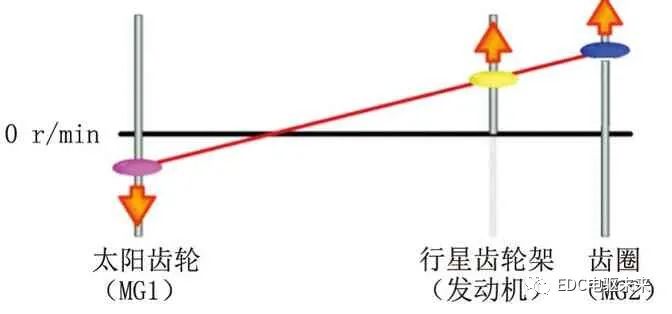
圖11 高壓動力電池SOC充足且加速踏板完全踩下時列線圖
在此情況下,若要進一步提升車速,必須削減發動機分配到驅動車輪上過多的驅動力,由于MG2此時是作為電動機持續為驅動車輪輸出動力,無法作為發電機來削減驅動車輪上過多的驅動力,因此HV-ECU使高壓動力電池對MG1(電動機)提供電力輸出,使MG1充當電動機反向負轉矩旋轉,以此提升驅動車輪的轉速,從而提升車速。隨著車速的提升,MG2直接輸出至驅動車輪上的驅動力大小幾乎沒有變化,發動機輸出功率不變,隨著MG1對驅動車輪轉速的逐漸拉升,發動機輸出至驅動車輪的驅動力也隨之下降,當發動機輸出至驅動車輪的驅動力結合MG2電動機補償至驅動車輪的輸出功率與行駛助力達到平衡后,車速達到最高,以勻速狀態行駛,此時,MG1所用來自高壓動力電池的用電功率達到最大,反向轉速達到最高,負轉矩最小。
5 減速狀態 ?
當車輛擋位置于D擋行駛,且車速逐漸降低時(圖12),發動機輸出功率為0 kW,此時驅動車輪驅動MG2(發電機)為高壓動力電池進行充電,MG2對驅動車輪產生阻力,并產生制動作用。
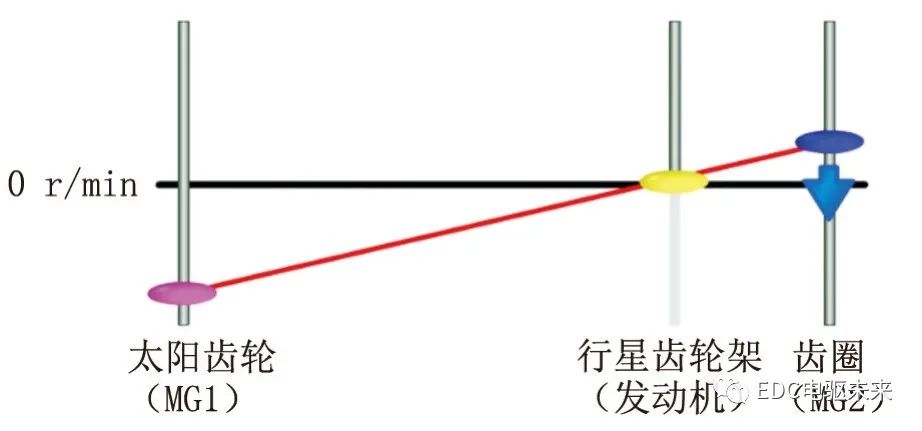
圖12 車輛擋位置于D擋行駛,且車速逐漸降低時列線圖
6 倒車狀態 ?
倒車狀態根據高壓動力電池SOC是否充足可分兩類討論,當高壓動力電池SOC充足時(圖13),高壓動力電池給MG2(電動機)提供電能進行反向負轉矩旋轉,此時發動機不工作,因為MG1的旋轉阻力小于發動機的旋轉阻力,因此MG1正向自由旋轉以平衡驅動車輪的旋轉。

圖13 倒車狀態下高壓動力電池SOC充足時列線圖
當高壓動力電池SOC不足時(圖14),發動機給MG1(發電機)提供動力輸出,使MG1進行正向負轉矩旋轉,MG1產生的交流電通過絕緣雙柵晶體管分別傳輸至MG2和高壓動力電池,此時MG2(電動機)反向負轉矩旋轉使驅動車輪反向旋轉。
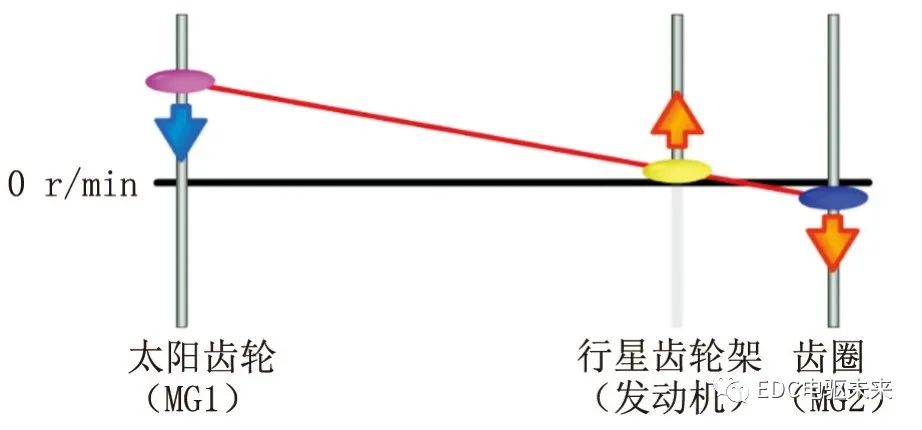
圖14 倒車狀態下高壓動力電池SOC不足時列線圖
審核編輯:黃飛
?











 工商網監
工商網監
評論