 電子發(fā)燒友App
電子發(fā)燒友App


科技進(jìn)步推動(dòng)產(chǎn)品創(chuàng)新,給各行各業(yè)的設(shè)計(jì)師們帶來了前所未有的挑戰(zhàn),這一點(diǎn)在汽車行業(yè)尤為明顯。汽車廠商正努力將已實(shí)現(xiàn) ADAS 功能的 L2 自動(dòng)駕駛技術(shù)升級到 L3 和 L4,并最終能在自動(dòng)駕駛領(lǐng)域,將基于 AI 的系統(tǒng)發(fā)展到 SAE 6 級水平。L3 級乘用車已在全球多個(gè)地區(qū)上路行駛,L4 級自動(dòng)駕駛出租車目前也在舊金山等城市街道上進(jìn)行廣泛試驗(yàn)(在有些地區(qū)已投入商業(yè)使用)。但是,在這些車輛大規(guī)模投入市場之前,仍存在許多商業(yè)、物流和監(jiān)管方面的挑戰(zhàn)。
汽車廠商面臨的挑戰(zhàn)之一是要彌合兩種情況之間的差距:一邊是于少數(shù)技術(shù)實(shí)例的概念驗(yàn)證,另一邊是將概念轉(zhuǎn)化成為穩(wěn)健、可重復(fù)和實(shí)用的大規(guī)模制造和部署。后者要求設(shè)計(jì)穩(wěn)定、安全、可靠,并且定價(jià)合理。
在進(jìn)行概念驗(yàn)證時(shí),可以通過不同的途徑實(shí)現(xiàn)目標(biāo)。“自上而下”的方法是在車輛中集成盡可能多的硬件、傳感器和軟件,然后通過實(shí)現(xiàn)融合、降低復(fù)雜性,達(dá)到性能、成本和重量目標(biāo)。相反,“自下而上”的方法則更有條理,汽車廠商先完成一個(gè)級別的自動(dòng)駕駛設(shè)計(jì),然后再收集數(shù)據(jù)并克服必要的挑戰(zhàn),達(dá)到下一個(gè)級別。后一種方法越來越受到大型主機(jī)廠的青睞。
設(shè)計(jì)過渡從L2到L3到L4逐步提升
汽車要提供先進(jìn)的 ADAS 系統(tǒng),并最終實(shí)現(xiàn)自動(dòng)駕駛,必須感知周圍環(huán)境,然后根據(jù) “看到的內(nèi)容”采取行動(dòng)。車輛對環(huán)境的認(rèn)知越準(zhǔn)確,就能做出越好的決策,行車也越安全。因此,設(shè)計(jì)自動(dòng)駕駛汽車時(shí),首先要確定部署在車輛周圍的傳感器數(shù)量和類型。在環(huán)境傳感方面,有三種常用技術(shù):圖像傳感器即攝像頭、毫米波雷達(dá)和激光雷達(dá),三者各有利弊。
在上述的三種傳感器中,很明顯,攝像頭和激光雷達(dá)的算法處理已經(jīng)普遍在中央域控了,而目前市場上的各類毫米波雷達(dá),通常還是前端處理,生成目標(biāo)以后,再送到中央域控,而并非中央集中處理。我們將在本文中著重介紹對于 4D 成像毫米波雷達(dá)進(jìn)行中央集中處理的必要性和安霸 CV3?在這方面的技術(shù)優(yōu)勢。
一旦確定了車輛對傳感器的需求,就要做出一系列關(guān)鍵決定,包括設(shè)計(jì)系統(tǒng)架構(gòu)和選擇配備合適的處理器。這就需要從根本上考慮是集中處理傳感器數(shù)據(jù),還是在前端處理傳感器數(shù)據(jù)。
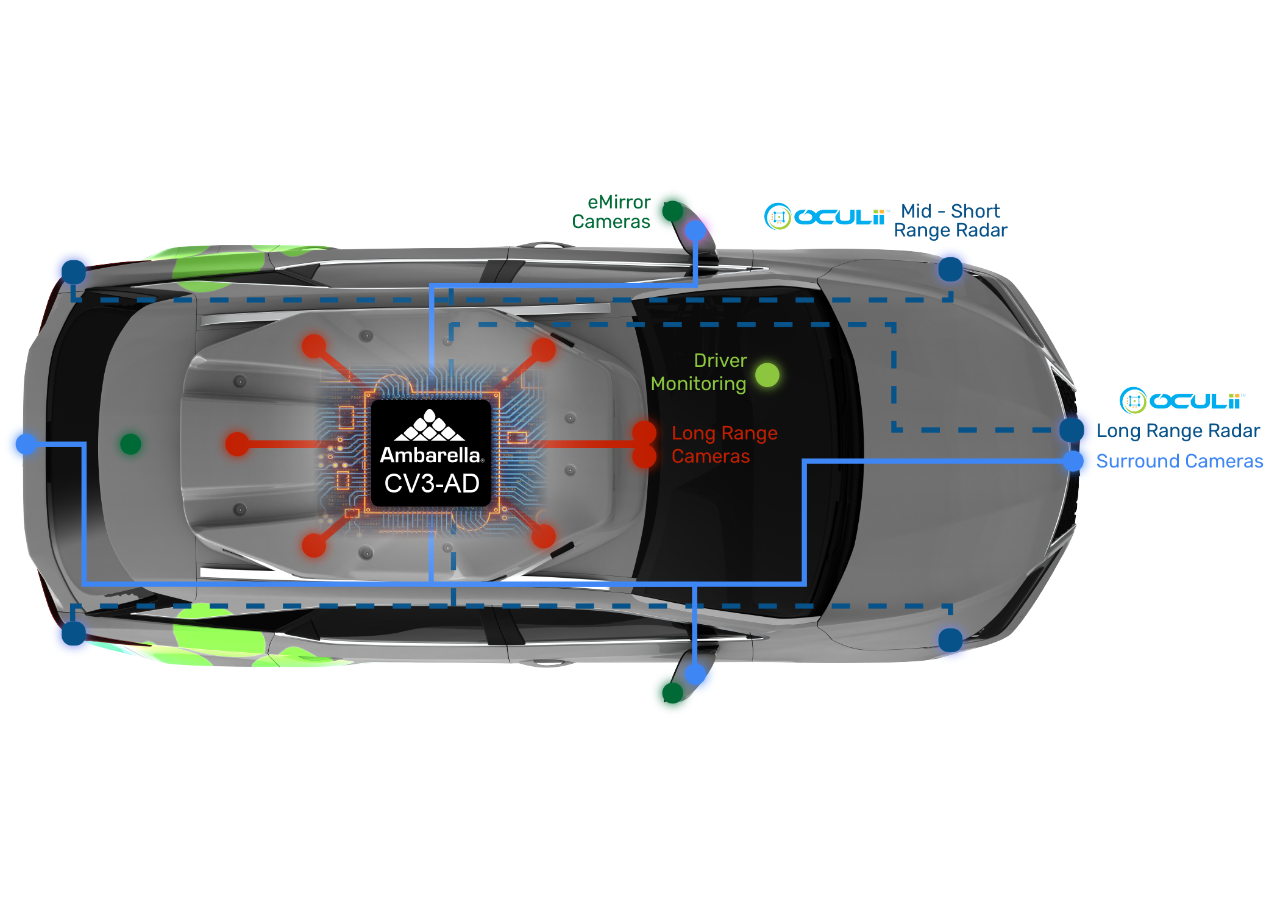
圖1 確定傳感器架構(gòu)是自動(dòng)駕駛汽車取得成功的前提
傳統(tǒng) 3D 雷達(dá)技術(shù)雖然成本較低,但在感知能力存在著一些不足。通常毫米波雷達(dá)做前端計(jì)算,生成目標(biāo)以后,在域控里和來自攝像頭的感知結(jié)果做后融合。這種方式因?yàn)樵谇岸说?a target="_blank">信息損失,不僅使得 3D 雷達(dá)的作用被大大削弱,并且在視覺感知高度發(fā)展的今天,傳統(tǒng) 3D 雷達(dá)有靠邊站的趨勢。
隨著毫米波雷達(dá)技術(shù)的演進(jìn),我們看到 4D 成像毫米波雷達(dá)的技術(shù)指標(biāo)比起傳統(tǒng) 3D 毫米波雷達(dá)有了大幅的改進(jìn),包括多了一個(gè)高度維度,看得更遠(yuǎn),點(diǎn)云更密集,有更好的角分辨率,對靜止目標(biāo)檢測更可靠,更低的誤檢和漏檢等。4D 成像毫米波雷達(dá)之所以有這些技術(shù)優(yōu)勢,往往來自于更復(fù)雜的調(diào)制技術(shù),和更復(fù)雜的點(diǎn)云算法,跟蹤算法等。因而 4D 成像毫米波雷達(dá)往往需要專門的雷達(dá)處理芯片才能達(dá)到所需的高性能。目前市場上已經(jīng)存在一些在前端雷達(dá)模塊中添加雷達(dá) DSP 或 FPGA 來進(jìn)行前端計(jì)算的設(shè)計(jì)。雖然這些前端計(jì)算的 4D 成像毫米波雷達(dá)有些展現(xiàn)出比傳統(tǒng) 3D 雷達(dá)更好的性能,成本較高,不利于廣泛應(yīng)用。
而在集中式處理方法下,由于所有傳感器的原始數(shù)據(jù)都在一個(gè)中心點(diǎn)進(jìn)行合并,數(shù)據(jù)進(jìn)行融合時(shí)不會(huì)丟失關(guān)鍵信息。由于不在前端進(jìn)行處理,毫米波雷達(dá)傳感器模塊大大簡化,從而縮小了尺寸,降低了功耗和成本。此外,大多數(shù)毫米波雷達(dá)都位于車輛保險(xiǎn)杠后側(cè),最大限度地降低事故后的維修費(fèi)用。
集中式處理方法還能讓研發(fā)人員靈活地實(shí)時(shí)調(diào)整毫米波雷達(dá)數(shù)據(jù)和攝像頭數(shù)據(jù)的相對重要性,在各種環(huán)境天氣和駕駛條件下提供最佳的環(huán)境感知能力。舉例來說,在惡劣天氣條件下,沿高速公路行駛時(shí),毫米波雷達(dá)數(shù)據(jù)將發(fā)揮更大優(yōu)勢;而在擁擠的城市中緩慢行駛時(shí),攝像頭在識別車道線,讀取道路標(biāo)志和場景感知,識別危險(xiǎn)方面將發(fā)揮更重要的作用;而激光雷達(dá)對于一般障礙物檢測和夜晚 AEB 方面更有特色,動(dòng)態(tài)配置傳感器套件可以節(jié)省處理器資源,降低能耗,同時(shí)提高環(huán)境感知能力和安全性。
前端處理與中央域控處理4D成像毫米波雷達(dá)的比較
前端處理成像雷達(dá)
1. 算力受限,更大的算力帶來更大的功耗,影響雷達(dá)數(shù)據(jù)密度和靈敏度
2. 固定的計(jì)算模式,必須為最惡劣的場景考慮,雖然在常見場景用可能用不到
3. 更高的雷達(dá)前端成本, 因?yàn)槔走_(dá)的數(shù)據(jù)處理放在前端節(jié)點(diǎn),增加成本
4. 傳感器融合過于簡單,只能用目標(biāo)級融合
中央處理的域控雷達(dá)
1. 為更強(qiáng)大更高效的集中處理,雷達(dá)可以得到更好的角分辨率,數(shù)據(jù)密度和靈敏度
2. 算力可以根據(jù)場景,在幾個(gè)雷達(dá)之間動(dòng)態(tài)調(diào)整,以達(dá)到更好的算力利用率,提升感知結(jié)果
3. 更低的雷達(dá)前端成本,因?yàn)槔走_(dá)的前端只有傳感器,沒有計(jì)算單元
4. 可以做4D雷達(dá)數(shù)據(jù)和攝像頭數(shù)據(jù)深度的深度融合
SoC 選擇
隨著電動(dòng)汽車的普及,如何節(jié)約電能并最大限度地提高“每次充電的續(xù)航里程 ”成為每個(gè)車輛零部件的關(guān)鍵考慮因素。節(jié)能是集中式 AI 域控芯片的優(yōu)勢。有些多芯片中央域控消耗大量電能,因而縮短了車輛的續(xù)航里程。如果 SoC 產(chǎn)生的熱量過大,需要設(shè)計(jì)主動(dòng)冷卻方案,甚至某些架構(gòu)需要液體冷卻,這就大大增加了汽車的尺寸、成本和重量,從而降低了電池續(xù)航能力。
AI 智駕軟件正迅速成為系統(tǒng)的關(guān)鍵要素,AI 的實(shí)現(xiàn)方式對 SoC 的選擇,以及開發(fā)系統(tǒng)所花費(fèi)的時(shí)間和資金投入都有重大影響。關(guān)鍵是如何以最小的工作量和能源,運(yùn)行最新的神經(jīng)網(wǎng)絡(luò)算法,但又不犧牲精度。這不僅需要仔細(xì)考慮硬件該如何實(shí)現(xiàn)神經(jīng)網(wǎng)絡(luò),還要考慮為中間件、設(shè)備驅(qū)動(dòng)程序和 AI 工具提供支持,縮短開發(fā)時(shí)間并降低風(fēng)險(xiǎn)。
車輛出廠后,無論是解決某個(gè)問題,還是新增功能,軟件都需要持續(xù)更新。基于單個(gè)域控制器的集中式架構(gòu)簡化了這一過程,OTA 升級的實(shí)現(xiàn),解決了目前需要單獨(dú)更新每個(gè)前端模塊軟件的難題(更加昂貴和復(fù)雜)。這種 OTA 方法也意味著系統(tǒng)網(wǎng)絡(luò)安全是設(shè)計(jì)過程中需要解決的另一個(gè)重要領(lǐng)域。
SoC 的選擇影響著設(shè)計(jì)過程的各個(gè)方面,包括整輛自動(dòng)駕駛汽車的效能。為了賦能大型主機(jī)廠更快落地極具性價(jià)比的智駕產(chǎn)品,綜合性地考慮到客戶需求,為客戶帶來主攻 L3/L4 旗艦智駕系統(tǒng)的大算力中央域控 AI 芯片 CV3-AD685,該芯片可實(shí)現(xiàn) 4D 成像毫米波雷達(dá)原始數(shù)據(jù)的集中式處理和深度融合。
為什么安霸傲酷雷達(dá)可以做到成本更低呢?
這是因?yàn)椋瑐鹘y(tǒng) 4D 成像毫米波雷達(dá)使用固定的調(diào)制技術(shù),需要根據(jù)調(diào)制方案對性能進(jìn)行折中。不過,采用基于 AI 的實(shí)時(shí)動(dòng)態(tài)波形的新興 4D 成像毫米波雷達(dá)設(shè)計(jì)正在幫助解決這一難題。將 “稀疏化陣列天線”與可動(dòng)態(tài)學(xué)習(xí)并適應(yīng)環(huán)境的 AI 算法(即虛擬孔徑成像(VAI)技術(shù))相結(jié)合,從根本上打破了調(diào)制帶來的性能折中,可將 4D 成像毫米波雷達(dá)的分辨率提高至 100 倍。這大幅度提高了角度分辨率,以及系統(tǒng)性能和精確度,而天線數(shù)量也減少了一個(gè)檔次,外形尺寸、功率預(yù)算、數(shù)據(jù)傳輸要求和成本也相應(yīng)降低。
如何在 CV3 上做中央域控雷達(dá)設(shè)計(jì)呢?
CV3 支持雷達(dá)前端傳感器直接傳輸 RAW 數(shù)據(jù)到域控,而在 CV3 上完成必要的雷達(dá)計(jì)算包括高質(zhì)量點(diǎn)云生成,處理,跟蹤等算法。CV3-AD685 上帶有專用 4D 成像毫米波雷達(dá)處理硬件單元,簡潔而高效地完成多個(gè)雷達(dá)同時(shí)工作時(shí)的數(shù)據(jù)處理。
圖 3 顯示了一個(gè)功能強(qiáng)大的 SoC 框圖,它是安霸的 CV3-AD685。該 SoC 專為汽車中央域控制器而設(shè)計(jì),可高性能運(yùn)行各種神經(jīng)網(wǎng)絡(luò)算法,實(shí)現(xiàn)完整的自動(dòng)駕駛解決方案。CV3-AD685 帶有專業(yè)圖像信號處理單元、可使用各種傳感器感知(如來自攝像頭、毫米波雷達(dá)、超聲波雷達(dá)和激光雷達(dá))、執(zhí)行多種傳感器的深度融合,運(yùn)行車輛路徑預(yù)測規(guī)劃控制等算法。CV3-AD 系列專為汽車智駕設(shè)計(jì)的架構(gòu)與 GPU 等競品芯片架構(gòu)截然不同,GPU 一般采用更為通用的并行計(jì)算設(shè)計(jì),以運(yùn)行各種不同的應(yīng)用。因而在運(yùn)行智駕應(yīng)用的時(shí)候,CV3 比競品的效率更高,功耗更低。
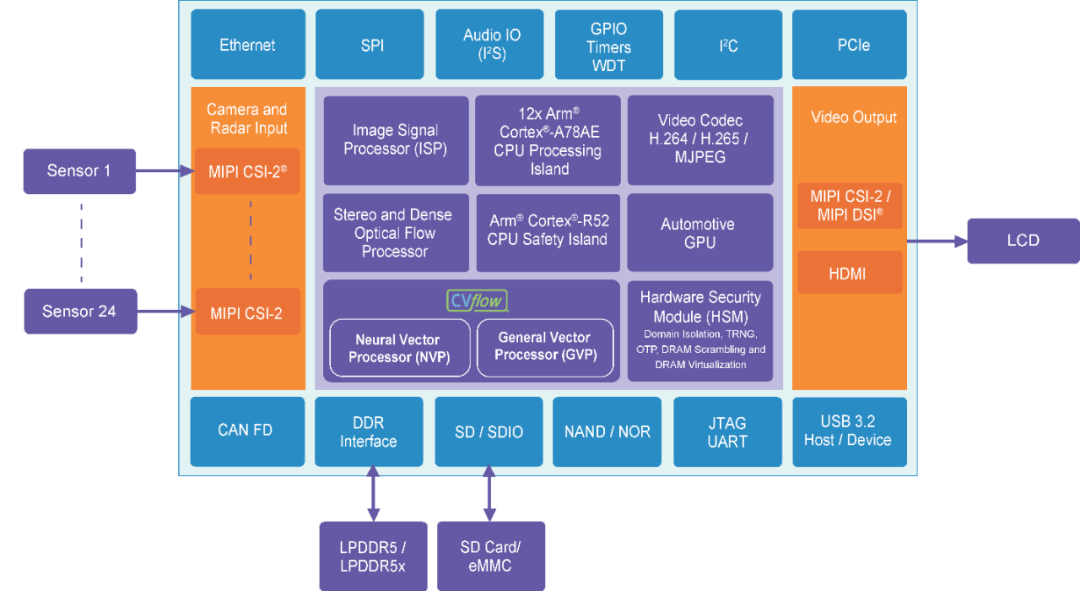
圖3 安霸 CV3-AD685 SoC 框圖,該芯片專為汽車應(yīng)用中的集中式AI域控而設(shè)計(jì)。
如圖 3 所示,該 SoC 集成了神經(jīng)網(wǎng)絡(luò)處理器(NVP),通用矢量處理器 (GVP)(用于加速通用機(jī)器視覺算法和毫米波雷達(dá)處理)、高性能圖像信號處理器(ISP) 、12 個(gè) Arm Cortex-A78AE 和多個(gè) R52 CPU,雙目立體視覺和密集光流引擎、以及 GPU(用于 3D 渲染如 AVM )。CV3-AD系列的整體架構(gòu)和 CV3-AD685 相同,適用于從 L2+ 到 L4 級汽車智駕系統(tǒng),擁有充沛算力和安全冗余,可運(yùn)行完整的自動(dòng)駕駛解決方案。其 AI 性能則在高性能 GPU 的 3 倍左右,盡管性能出眾,這款 SoC 的工作功耗卻大幅低于競品。因此,使用 CV3-AD685,與競品芯片相比,在電池容量相同的情況下,電動(dòng)汽車的續(xù)航里程至少可增加 30 公里。另外,在保持相同續(xù)航里程的情況下,電池成本可以大幅降低,電池重量也可以減少幾公斤。
總結(jié)
近年來,智駕技術(shù)取得了質(zhì)的飛躍。不同的智駕高級功能成為主流已有一段時(shí)間,隨著汽車廠商不斷創(chuàng)新突破,其他新功能也不斷涌現(xiàn)。汽車行業(yè)現(xiàn)在面臨的挑戰(zhàn)是如何將目前的 L3 和 L4 級智能駕駛試驗(yàn)車全面投入生產(chǎn)。
這一進(jìn)步的關(guān)鍵在于傳感器的選擇,包括車輛的結(jié)構(gòu)和域控芯片的選擇。使用專為集中式傳感器融合設(shè)計(jì)的處理器,以及基于 AI 的創(chuàng)新技術(shù)(如稀疏化毫米波雷達(dá)陣列),自動(dòng)駕駛汽車可以集中處理毫米波雷達(dá)數(shù)據(jù),并將其與攝像頭數(shù)據(jù)進(jìn)行融合,對車輛周圍動(dòng)態(tài)環(huán)境做出及時(shí)反應(yīng)。這種性能和靈敏度的提高可以減少對激光雷達(dá)的依賴性,進(jìn)一步降低成本,并且達(dá)到更好的環(huán)境感知性能。
審核編輯:黃飛
?









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論