 電子發燒友App
電子發燒友App


?背景?
在汽車產業智能化的大背景下,汽車的功能變得更加豐富和智能,隨之帶來的是車輛的各種電子控制器的交互變得越來越復雜,傳統的分布式電子電氣架構已無法滿足日趨復雜多樣的汽車功能,汽車電子電氣架構也要隨之進行升級和進化。根據汽車電子電氣架構的演進趨勢來看,電子電氣架構正在向著更加先進的域集中架構、跨域融合架構以及車輛集中式架構的方向快速發展。
在跨域融合架構階段,為了進一步增強協同,在域集中架構的基礎上,出現了跨域融合的概念,即將多個域功能集成在一起,并進一步融合功能關聯度較高的其他功能,由功能域控制器將此類域功能進行集中。比如,在域集中架構階段,動力域和底盤域分別承擔了車輛動力系統和車輛底盤系統控制的功能,而在跨域融合階段,動力域和底盤域可以進行融合,共同承擔了車輛運動相關的控制,進一步形成了車輛運動域的概念。車輛運動域對于動力以及底盤系統的協同控制,可以在提高能效、駕駛樂趣和舒適度的同時,實現簡化系統、降低成本的目標,同時可以通過可擴展和模塊化的設計,以適應客戶多樣化的需求。

?整車運動域控制器平臺(VCU8.5)?
聯合電子推出了面向跨域融合的整車運動域控制器VCU8.5平臺。該平臺在前代整車控制器的基礎上進行了功能的升級和優化,特別是針對跨域融合控制的需求進行了系統的分析和設計,集成了EPB、FlexRay和Delay off等功能,具備更加強大的性能和更廣泛的適用性,為新能源汽車的“車輛運動融合控制”提供初步的探索。
VCU8.5整車運動域控制器產品除了具備上一代控制器基本整車控制器功能和系統解決方案以外(詳細請見:聯合電子新一代高性能整車控制器平臺(VCU8.1)),其特殊功能體現在如下幾個方面:
更加豐富的通訊資源,除支持CAN/LIN/Ethernet等多種通訊方式外,新增FlexRay通訊方式,支持更高速率、更高容錯率、更高靈活性和更高確定性的數據傳輸
支持EPB冗余控制,車輛的左右卡鉗由不同控制器分開控制,即使一側卡鉗或其控制器發生故障,另一側卡鉗仍可單獨控制,提高了EPB控制的安全性
支持Delay off控制,即使控制器發生非預期的軟件reset,Delay off功能仍然能夠保持繼電器吸合一段時間,提高系統的穩定性
支持車用Cyber Security技術
功能安全達到了ISO26262 ASIL D等級
支持A/B備份模式的遠程刷新(FOTA)
VCU8.5平臺支持Full Calibration系統解決方案,以及單獨提供硬件和底層軟件的Software sharing解決方案等多種靈活的合作模式。
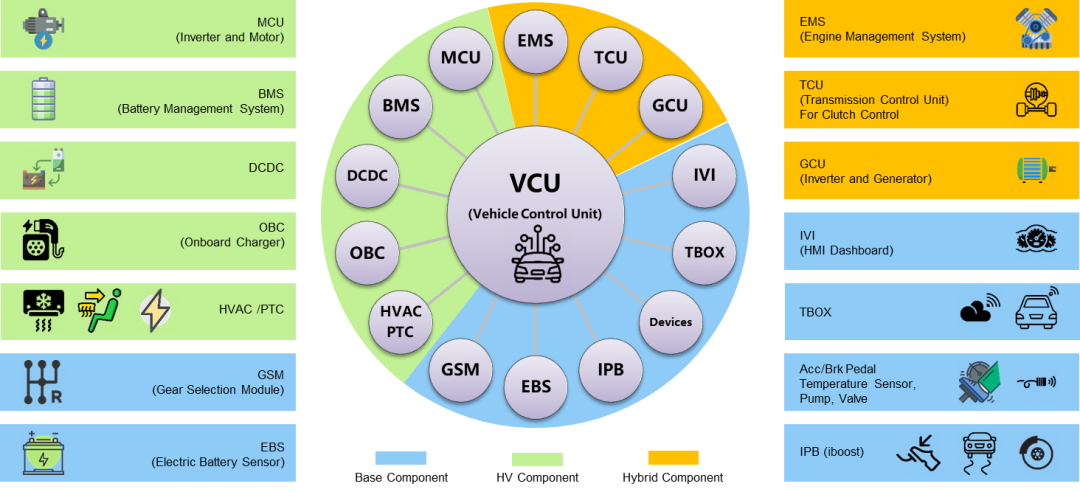
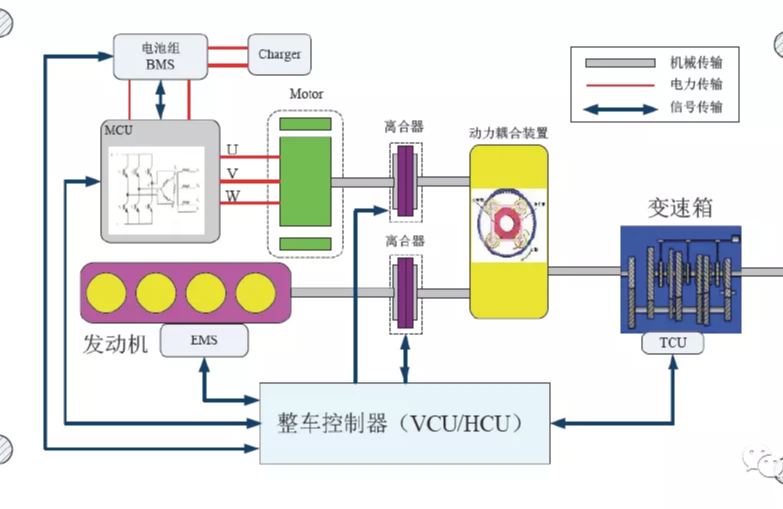
圖1? VCU協調控制的高低壓部件
作為車輛驅動協調控制系統的核心控制器,VCU需要負責整車狀態協調、駕駛員駕駛需求實現等最基本也是最重要的功能。因此VCU軟件的完善度直接影響了車輛運行的穩定性和行駛安全性。隨著“域融合”的概念推廣,越來越多的新功能也逐漸被融合到VCU控制器中,例如:跟充電相關的AC/DC車輛端充電主控功能,以及跟底盤相關的電動四驅控制功能。
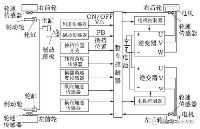
從系統功能劃分角度考慮,可以把VCU的功能劃分為:車輛系統、傳動系統、電力系統、熱管理系統,以及OBD診斷、通訊、安全監控等系統功能。VCU的主要功能如下圖2。
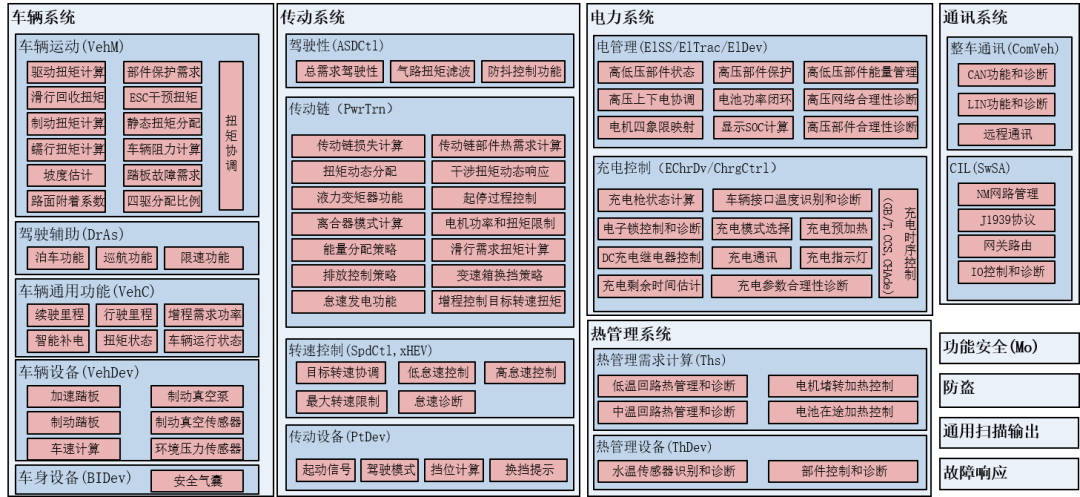
圖2? VCU系統功能分類和概覽
VCU軟件核心功能介紹
基于多個已經量產的客戶項目,經過多年的系統知識建立和功能軟件開發驗證工作,目前聯合汽車電子的VCU軟件已經在“扭矩”“電”“熱” 三個核心領域都具備完整的并且可根據客戶需求靈活配置的VCU系統解決方案。本文會主要圍繞與“扭矩”相關的車輛驅動方面介紹一些VCU軟件中的核心功能。后續還會有其它文章介紹與“電”“熱”相關的核心功能介紹。
支持多模式的車輛運行模式管理功能(混合動力)?
?
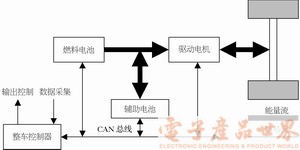
混合動力車輛的運行模式決策和切換過程控制可以實現:純電運行、串聯增程、并聯驅動三種運行模式決策和切換(圖3)。
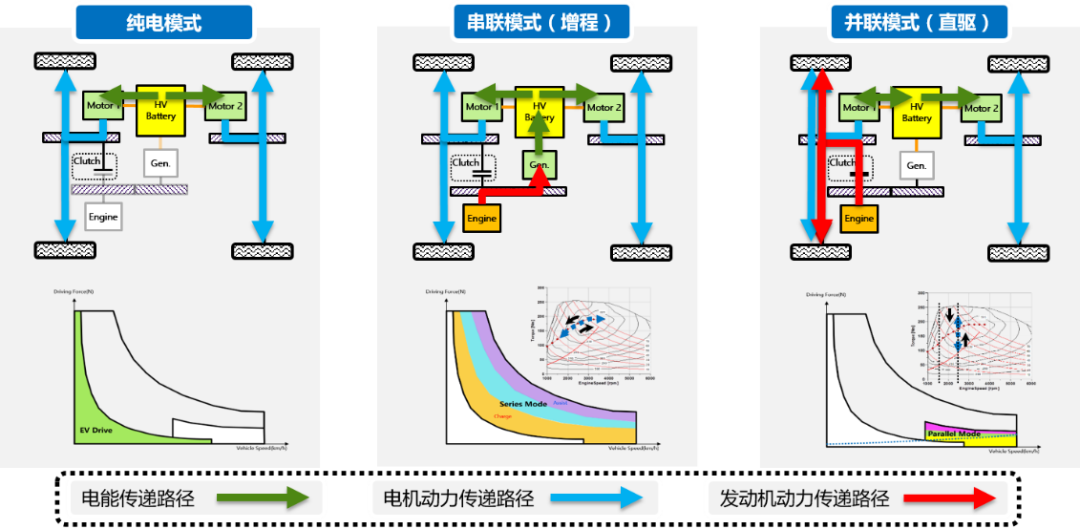
圖3 混動運行模式和能量流
整車運行模式決策功能基于ECMS(等效燃油消耗最小)算法(圖4),在各種工況下決策出能量消耗最小的運行模式(圖5)并實現電機/發動機最優能量分配比例,以達到更好的動力性和經濟性:在中低速時通過增程器發電,使發動機始終工作在高效區并為動力系統提供動力源;在高速時讓發動機和電機共同驅動車輛行駛,滿足動力性和經濟性需求。該模式決策相比行業中應用廣泛的基于規則的能量管理策略,ECMS能夠達到更好的節油效果,與全局優化策略和基于工況自適應的能量管理策略相比,ECMS能夠更好應用于實際工程項目中。
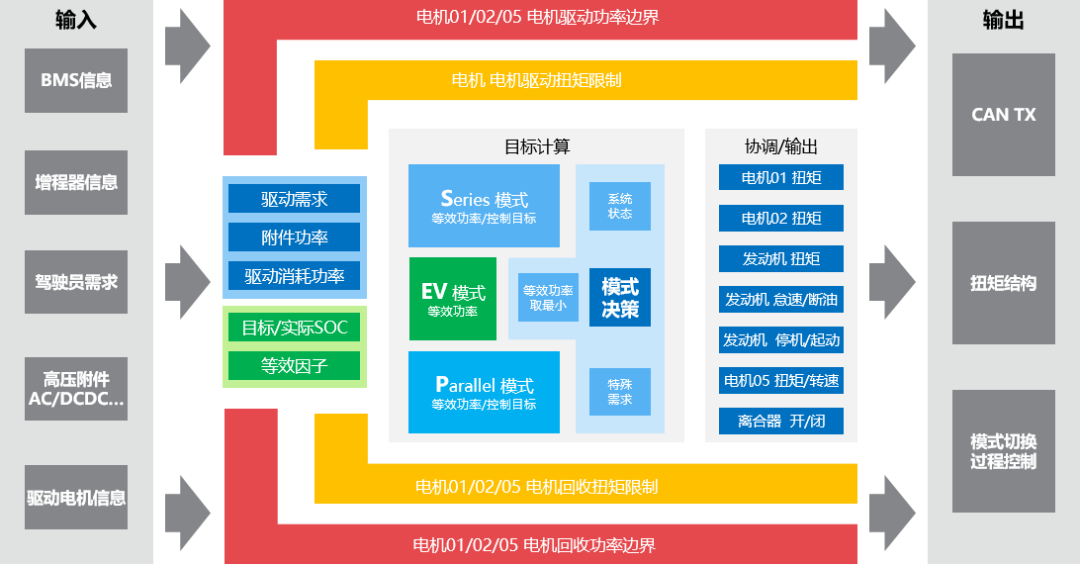
圖4 混動模式管理功能架構
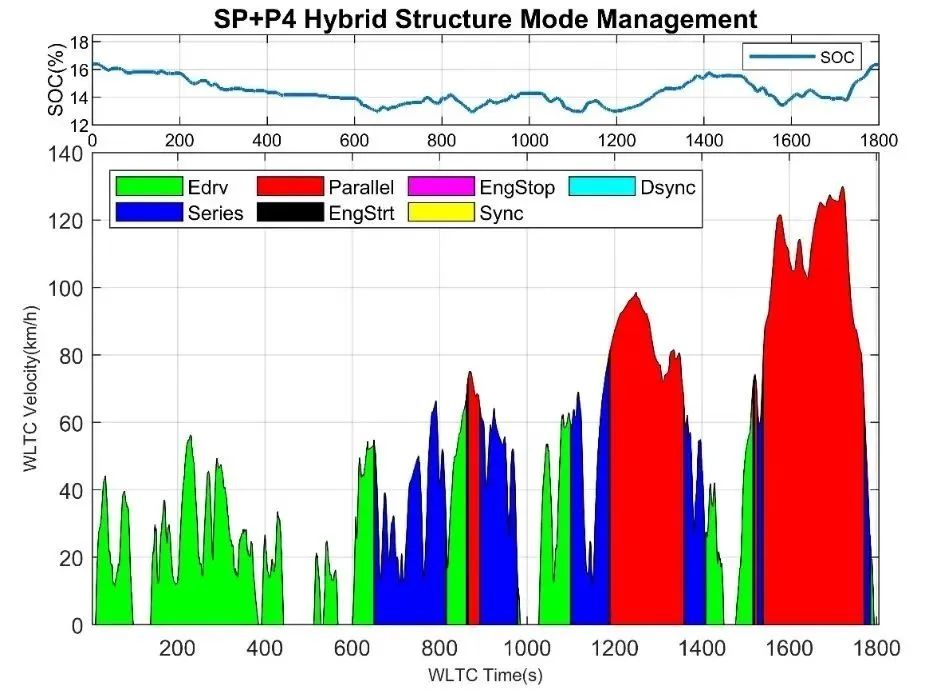
圖5 WLTC循環中模式分布
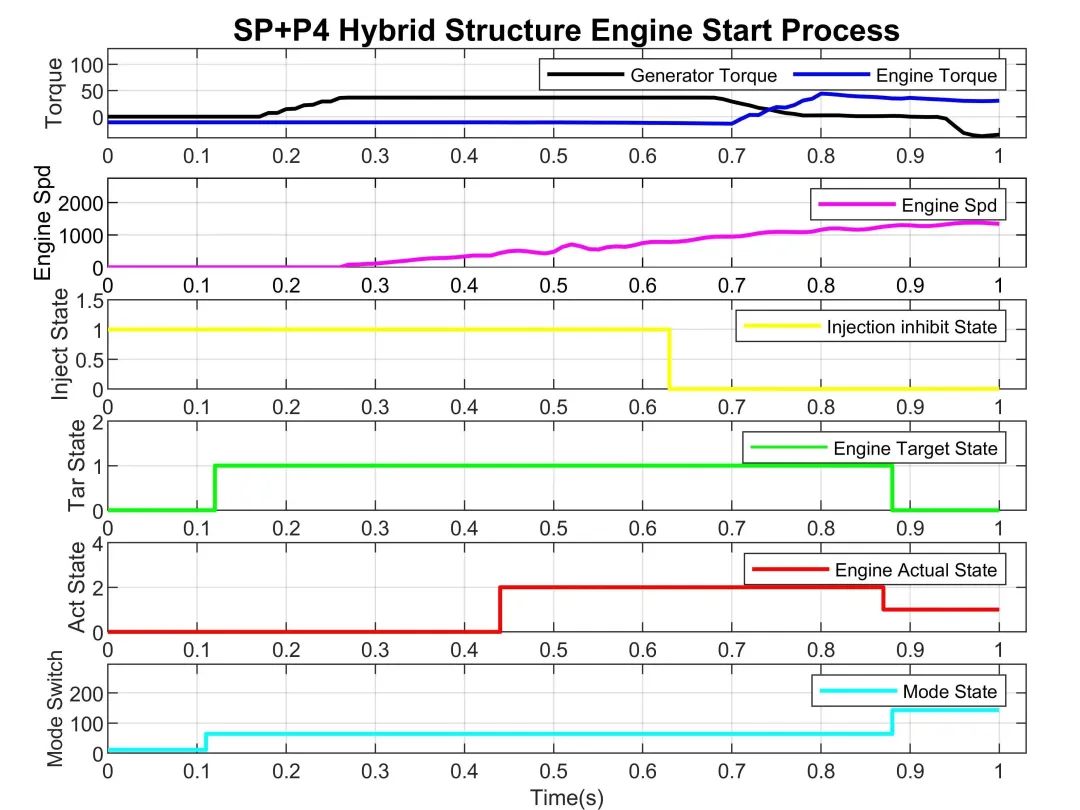
當車輛運行工況發生變化車輛運行模式需要切換時,模式切換過程控制功能可以確保在不影響駕駛員駕駛需求扭矩實現的前提下,VCU通過協調發動機、增程器、驅動電機和離合器之間的轉速和扭矩配合,實現快速平穩的模式切換控制過程(圖6)。
?
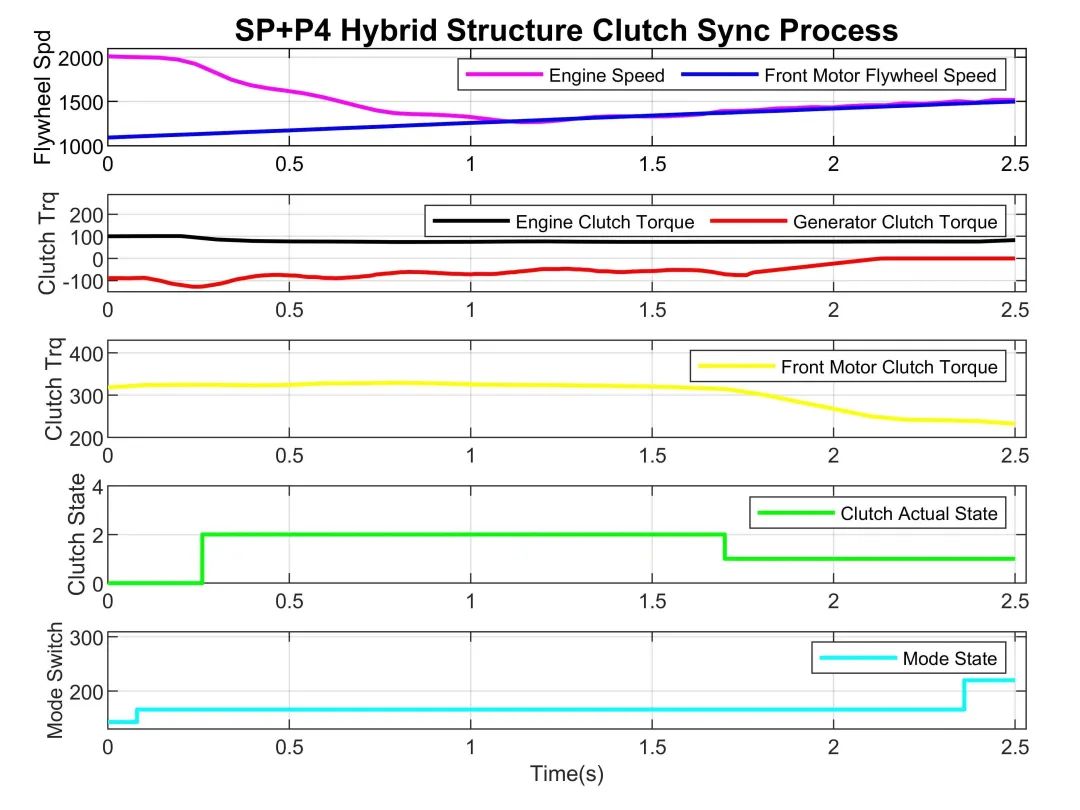
圖6 模式切換過程測試效果
基于部件物理層級的扭矩管理
扭矩管理需要協調來自駕駛員、駕駛輔助功能的驅動和制動扭矩需求,并可以根據整車運行模式功能和模式切換功能的輸出,協調各驅動部件(發動機、發電機、前驅動電機、后驅動電機)準確響應各種來源的扭矩需求。
已開發應用的扭矩管理功能實現了可靈活配置拓展的扭矩結構(圖7),可支持純電、混動項目,四驅/兩驅項目的靈活配置。基于實際部件物理層級的扭矩結構,也更易于拓展應用到其它拓撲結構的混合動力/純電車輛。
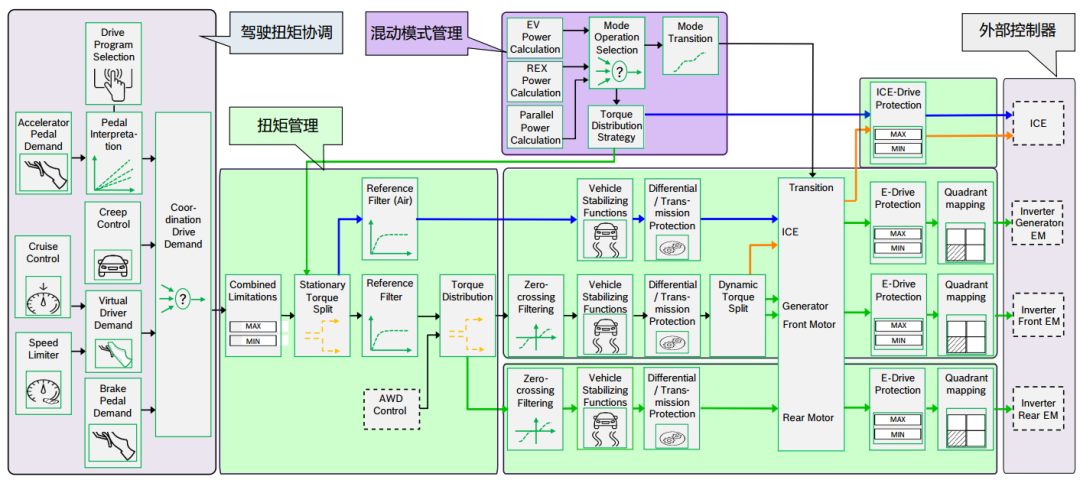
圖7 扭矩管理示意圖
多種分配方式的四驅控制功能
四驅控制功能是將駕駛員需求扭矩按照當前四驅控制需求進行前后軸扭矩分配,最終輸出至前后驅動電機,四驅控制功能在分配前后軸扭矩時能夠充分考慮不同因素的影響,兼顧整車的經濟性,動力性和操縱穩定性。也可以識別車輛的運動趨勢,主動介入車輛的運動控制,實現無級全范圍分配比調節(圖8)。
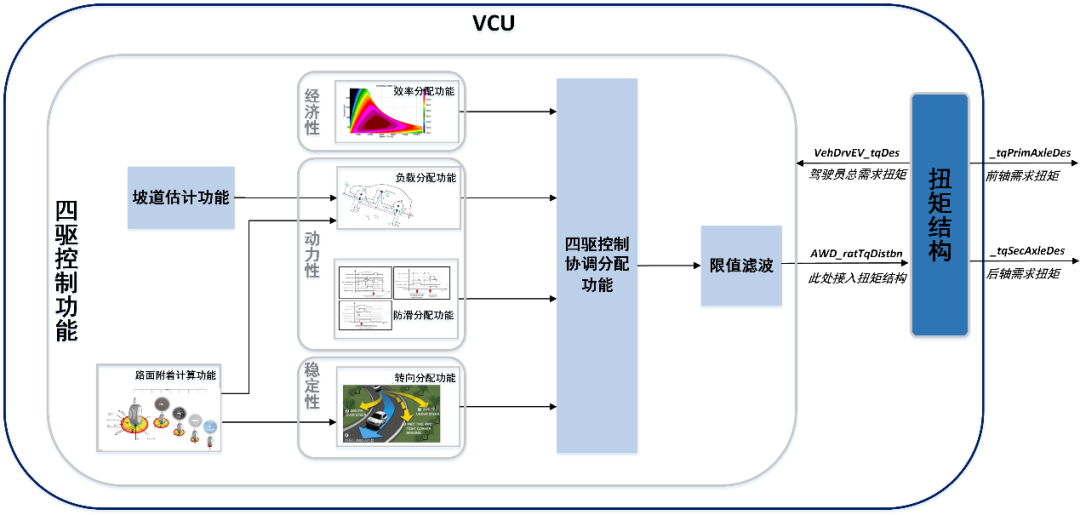
圖8 四驅控制功能架構
四驅經濟性分配功能可以在平穩駕駛的過程中使前后軸驅動電機工作在當前需求下的系統整體效率最優點,實現雙電機、三電機及四電機的效率最優分配,降低能耗增加續航里程。
四驅動力性分配中的負載分配功能可以通過識別當前路面坡度及車輛加減速情況,建立前后軸載荷模型計算前后軸扭矩的最佳分配比,在載荷轉移時通過前后軸扭矩智能分配充分利用地面最大附著力,減少車輪滑轉提高車輛加速能力(圖9)。
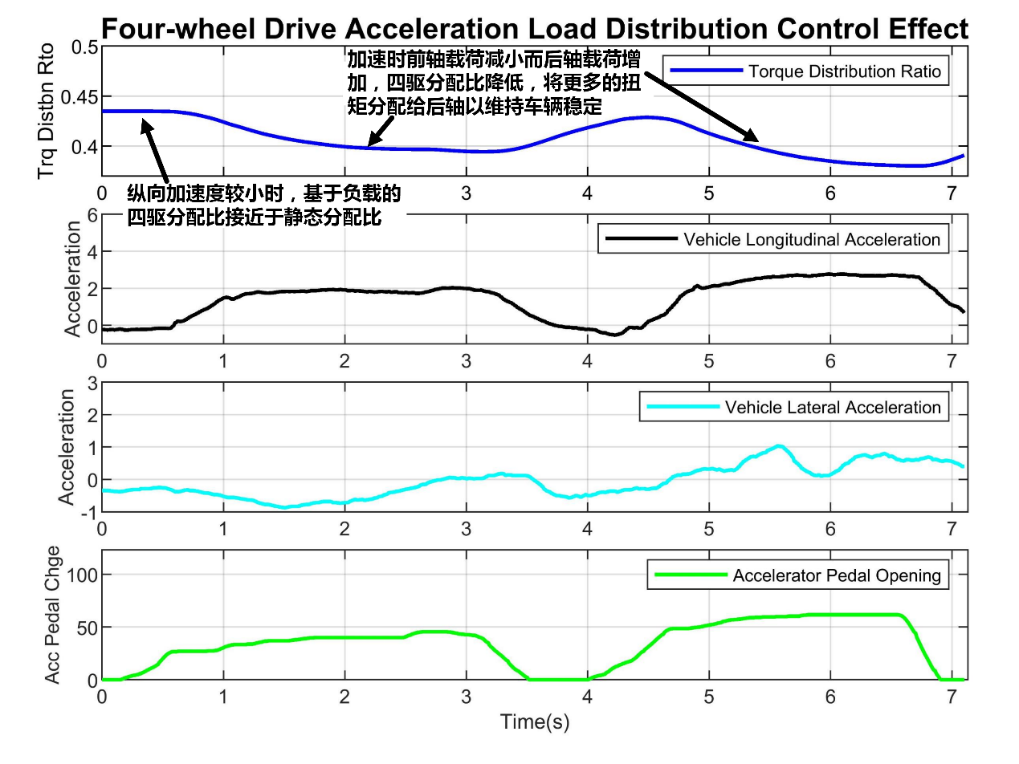
圖9? 加速負載轉移四驅分配測試效果
四驅動力性分配中的脫困防滑功能能夠在車輛單軸處于滑轉狀態時主動調整前后軸扭矩分配向未滑轉軸轉移,降低動力損失,在識別到前后軸交替滑轉時,動態控制前后軸扭矩分配,充分利用路面附著系數,提高車輛在低速時的脫困能力,降低無力感,提升駕駛舒適性。(圖10)
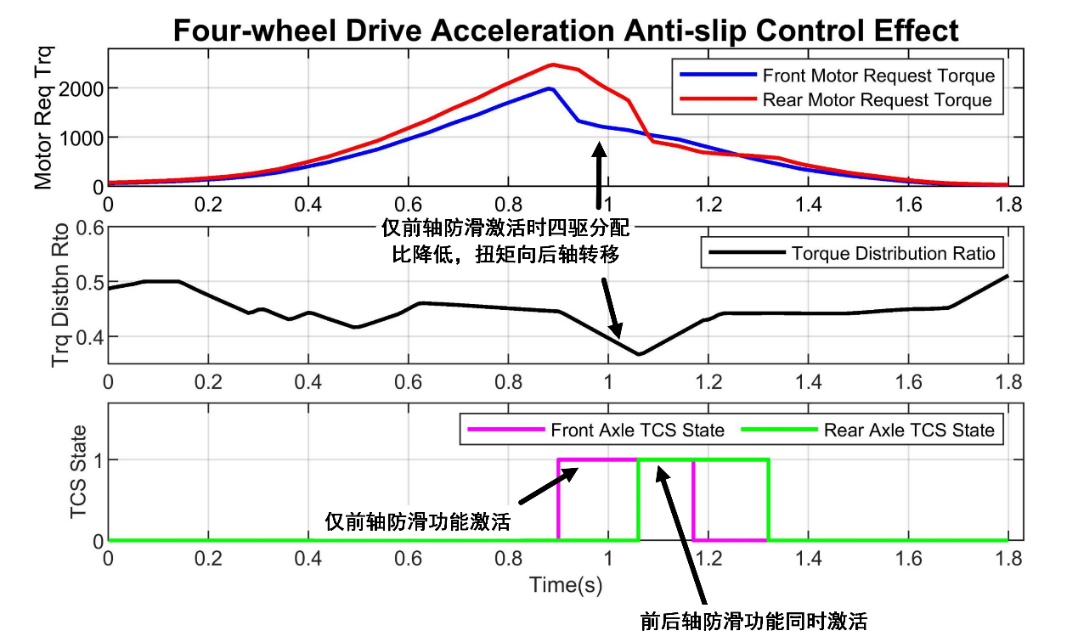
圖10 驅動防滑功能測試效果
四驅操縱穩定性分配使汽車跟隨駕駛員轉向意圖,提高轉向敏捷度,主要包含轉向狀態監測與轉向扭矩控制。可以在ESP介入前通過前后軸扭矩分配實時調整車輛運動姿態,及時抑制車輛轉向不足(US)和轉向過度(OS)的失穩狀況發生,在加速轉向工況降低ESP的介入頻次,減少制動沖擊與橫擺感,提高駕駛員的駕駛感受(圖11)。
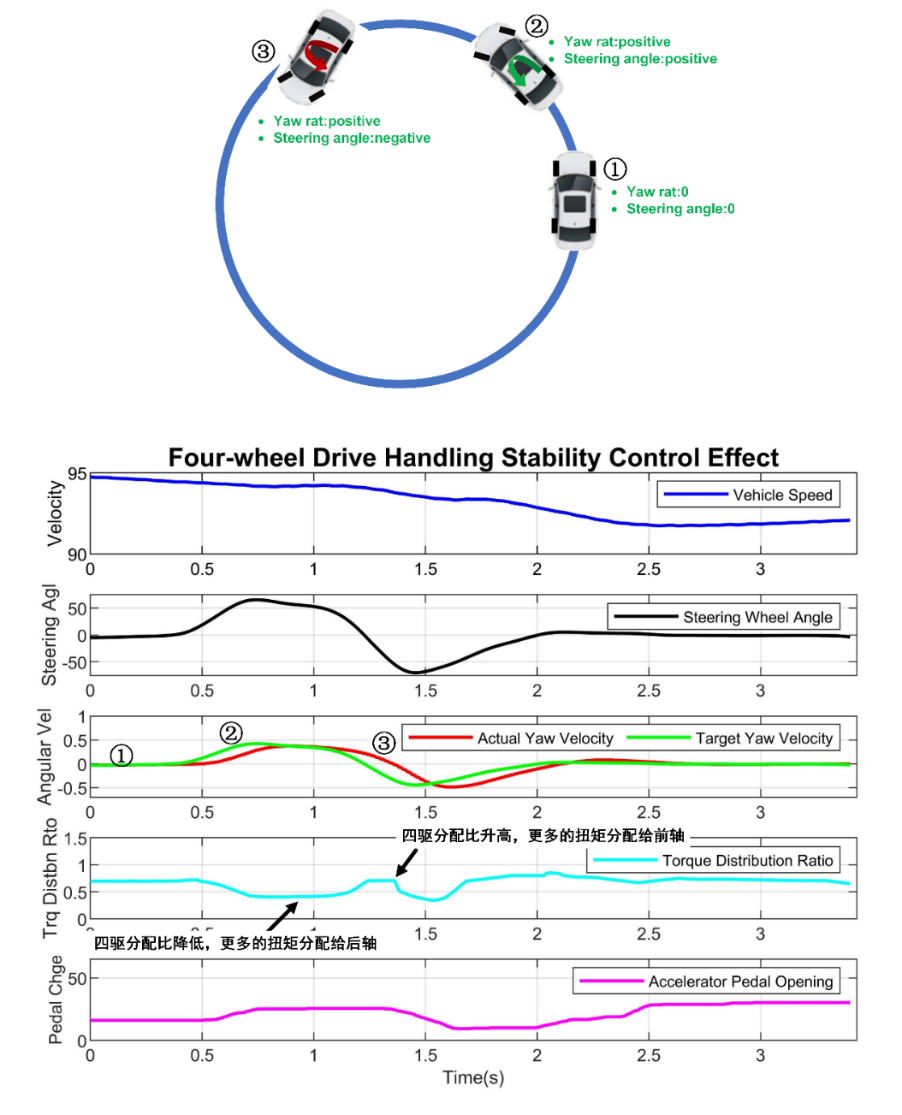
圖11 OS及US工況下的穩定性控制
四驅控制功能具有很強的擴展性和通用性,在EV和PHEV車輛上都可以使用。該方案將動力域與底盤域的部分相關控制功能進行了整合,提高了車輛運動相關的跨域整合能力。
支持 Reset后可自動恢復行駛狀態的電管理功能
如上文中提到VCU協調的部件很多,其中很多是高壓電力部件。因此VCU主要的工作之一是負責高低/壓電力系統的控制。包括:高壓上/下電協調、高壓功率分配和限制、高壓部件信息處理(包含D/R擋切換時的電機四象限映射),以及部件的診斷和保護功能。電力系統的穩定性和安全性很大程度的決定了整車的運行狀況。
對于電子控制器來說,在整個生命周期內很難避免完全不發生復位,比如VCU自身內部導致的硬件復位、軟件復位,以及外部干擾導致的復位等。雖然復位時間很短(比如軟件復位,發生復位到恢復通訊大概不到0.2s),但如果在有些場景(如高速行駛時)復位后不能盡快自動恢復之前的狀態,則車輛會失去動力,進而可能會給駕駛員帶來非常大的安全隱患。
特別是對于整車控制器VCU,很多動力相關的部件都受其控制。并且在正常情況下,如果要進入行車就緒狀態,一般需要至少兩個不同的操作(如踩剎車、按啟動按鈕、換擋等);而一旦在高速工況下出現了控制器復位,很多復位前儲存的信號會被初始化,此時如果仍需要駕駛員兩個連續不同操作,則可能出現非期望的減速,甚至造成追尾事故。
為此,聯合電子開發了一種新能源整車控制器軟件復位后動力自動恢復的控制功能(圖12),該功能通過識別到控制器發生了軟件復位,然后根據復位后車輛的狀態,決定是否需要恢復車輛復位前的狀態,實現在盡可能保證安全的前提下,自動恢復到復位前的狀態。
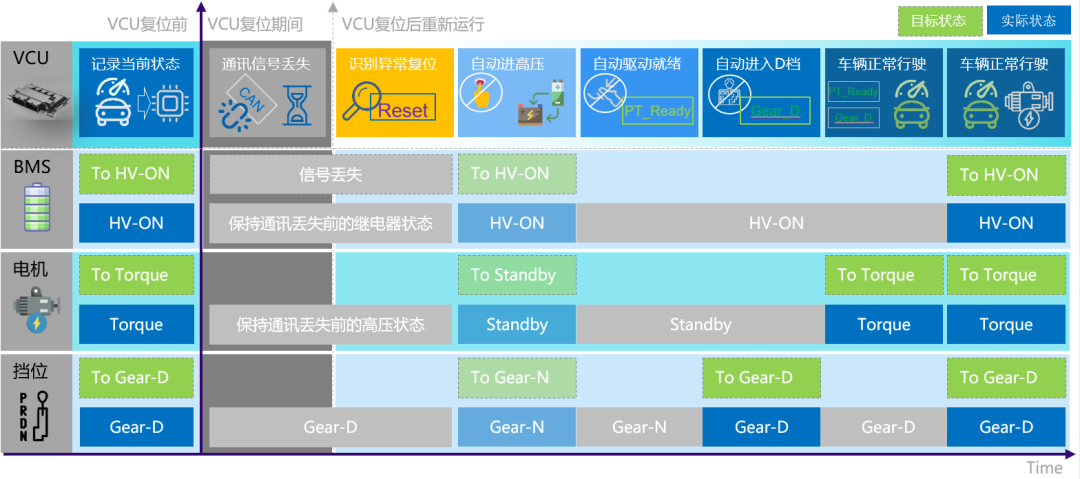
圖12 VCU 復位后自動恢復可行駛狀態
上述方案經過實車測試,在VCU發生復位后約0.11s后恢復通訊,該功能可以在0.19s內自動恢復高壓狀態,0.25s后自動恢復整車驅動就緒狀態,0.38s后自動恢復D擋并完成整個恢復過程。不需要駕駛員任何操作,整車恢復正常行駛狀態且沒有發生長時間動力丟失的現象(圖13)。
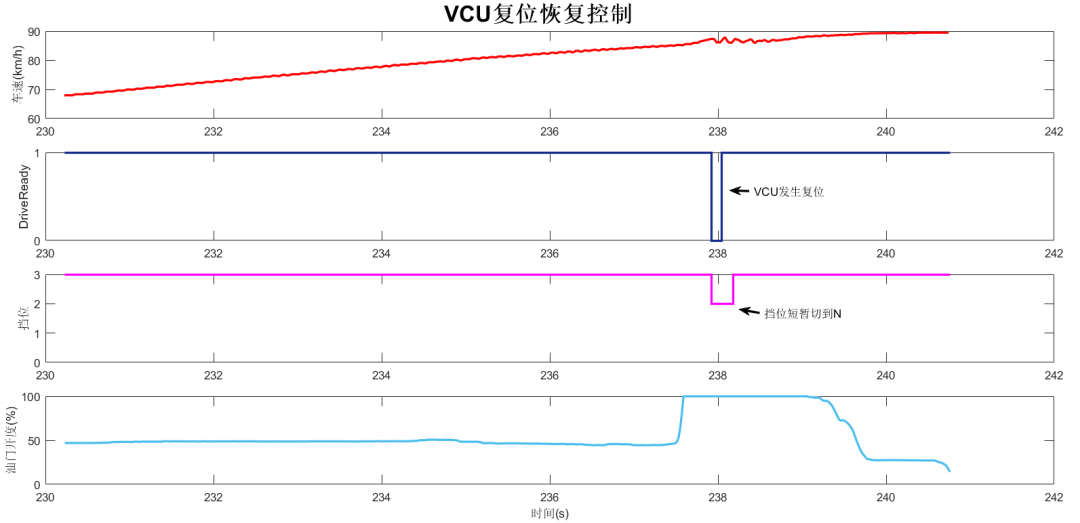
圖13?VCU 復位后自動恢復可行駛狀態實測效果
支持多種協議的VCU充電主控功能
充電控制功能負責識別不同模式的充電需求,根據不同的模式選擇對應充電控制過程。與供電設備(EVSE)、動力電池BMS等充電相關部件協調交互,實現充電使能條件判斷,充電過程監控,充電結束條件判斷等功能。開發的軟件不僅能實現支持國標交流/直流充電協議,也能滿足歐洲和北美的聯合充電系統(CCS)以及日本CHAdeMO充電協議(圖14)。為了解決充電設備的兼容性和充電時長難以滿足電動車車主的需求,軟件也實現了超級充電標準的充電控制功能。
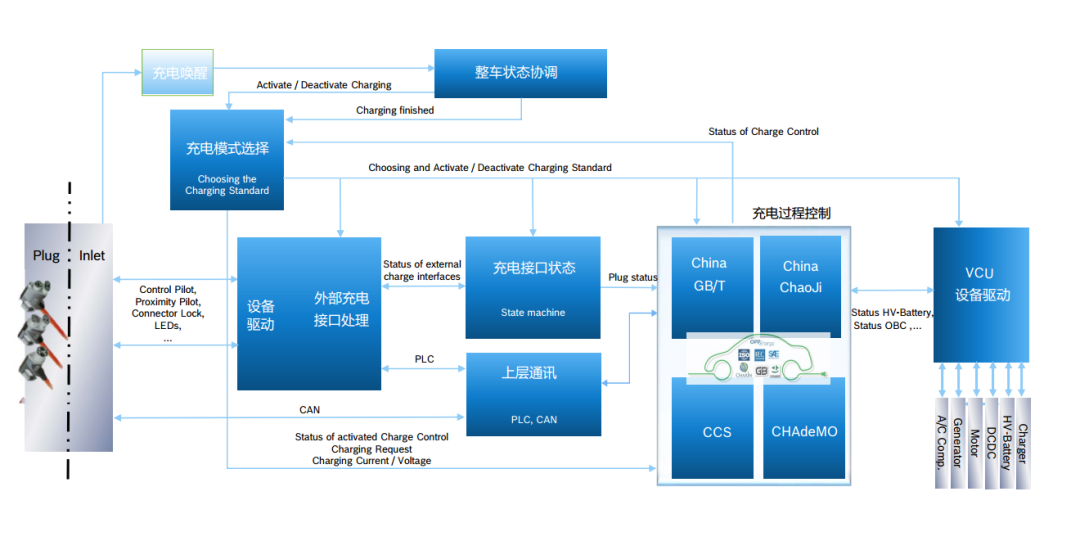
圖14?充電控制軟件架構
剩余充電時間是指電動車開始充電到充電結束所花費的時間,充電時間隨著車輛電量增多逐漸減小。剩余充電時間估算功能要求車輛在充電開始階段就能準確預測整個充電過程所花費的時間,但電動車充電過程中,充電時間受電芯特性、充電策略、樁輸出能力、整車熱管理和SOX估算精度等多個因素的影響,因此,高精度的剩余充電時間估算一直是行業難題。
聯合電子采用的是一種基于充電工況動態修正的自適應剩余充電時間估算算法,該算法將充電過程分為低電壓預充電,恒流充電和恒壓充電三個階段,算法根據每一階段的充電特征,分別估算各階段充電時間,然后累加求和得出總時間。在恒流充電階段,可以根據客戶需求配置基于電芯電壓或SOC階梯式充電策略的充電時間估算。
在充電過程中,算法通過增加充電樁輸出能力修正因子來預測未來充電樁最大輸出電流。對于高低溫工況,除了在充電開始前計算電池預熱、預冷時間外,充電時間算法在充電過程中也會基于電池熱模型和電池包熱管理策略,預測未來電池溫度,進而確定電池未來的充電電流。對于充電末端,由于SOC精度造成充電時間偏差,算法增加基于單體電壓的充電時間倒計時算法以提高末端充電時間估算精度(圖15)。
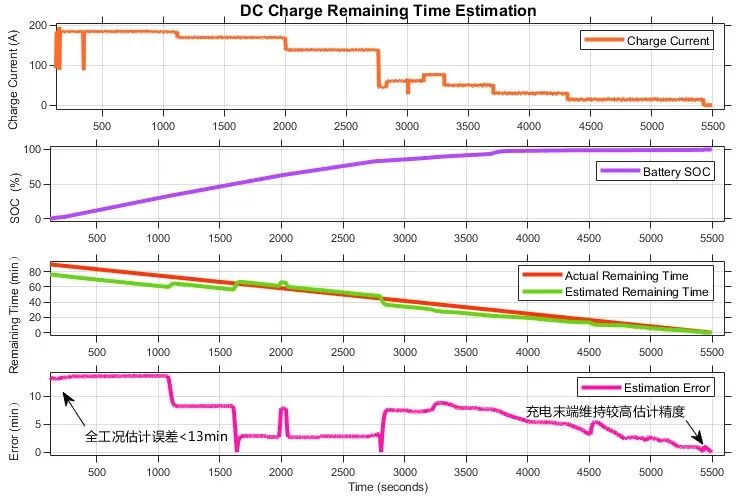
圖15?直流充電剩余時間計算實測效果
支持充電預熱的中低溫回路熱管理控制
熱管理控制功能可以協調來自于電池、電機、發動機和駕駛艙等的加熱或冷卻需求(圖16),結合整車模式來決策和切換熱管理控制模式,進而控制各子系統準確的響應各種來源的熱管理需求。開發的軟件可以適用于純電和混動項目中的多種熱管理拓撲結構。
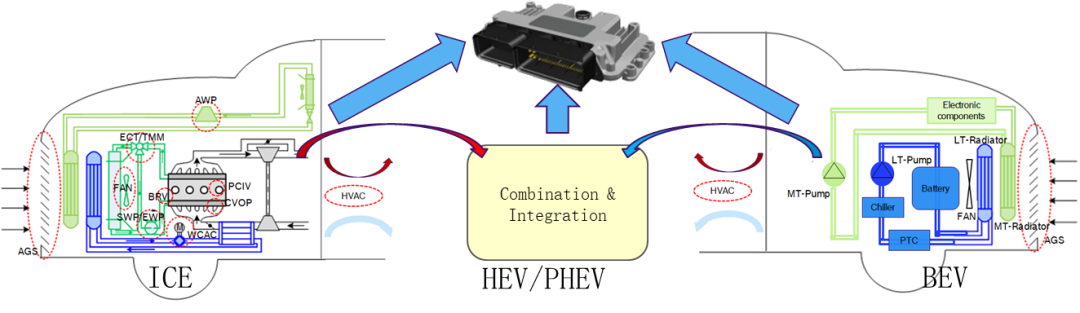
圖16?VCU熱管理需求來源
為了提升低溫環境下車輛上電后快速達到電池合適的運行狀態,開發的電池遠程預熱功能可以結合駕駛員的出行時間、電池狀態、充電狀態以及整車能量狀態對電池進行預熱,在駕駛員用車時使電池性能達到最優狀態。方案引入了一次喚醒計算預熱時間和二次喚醒執行預熱的概念,并且在駕駛艙有預調節需求時,引入特定的電管理和能量協調方案,進而實現能耗、電池性能、駕駛艙舒適性最優。
充電預熱控制可以實現用戶在低溫插槍充電時,根據電池的預熱請求,控制電池處于預熱模式。在充電機輸出能力范圍內,由充電機輸出功率通過電池加熱器(PTC)對電池加熱。因為在充電預熱模式下,電池的主繼電器在斷開狀態,能確保電池不會有電流輸入或輸出,確保不會對低溫條件下的電池造成損壞。當電池被加熱到合適溫度后,再控制電池退出預熱模式進入正常的充電模式。方案實現了在低溫下給電池充電有效保護電池的同時,縮短充電時間,給用戶帶來更好的充電體驗(圖17)。
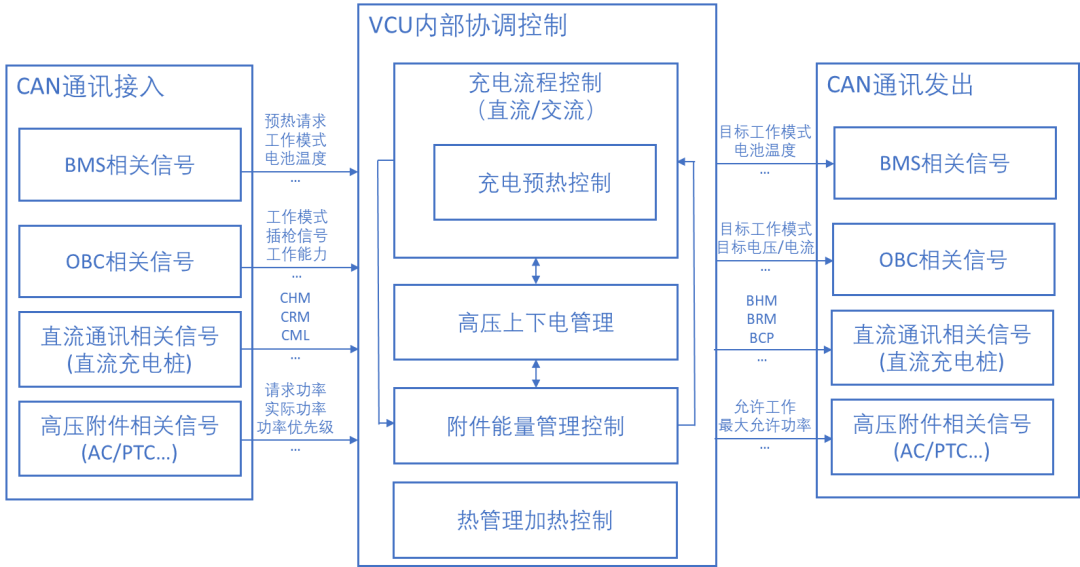
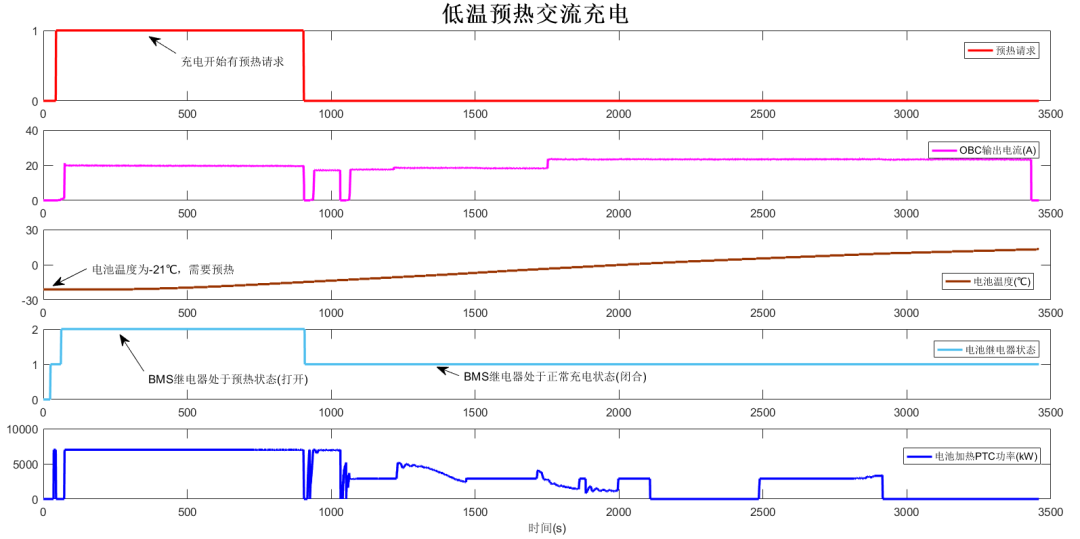
圖17?低溫交流充電預熱實測效果
低溫環境兼顧功率保護和駕駛性改善策略
在電池溫度很低時電池的充放電功率受限,行車過程中會經常用到電池的功率邊界。當整個系統在功率邊界附近運行時,會非常容易導致電池過充或過放發生。此時系統會進行快速閉環調節以把電池功率調整到正常范圍內,但這會導致駕駛性變得很差。因此如何在低溫環境下同時兼顧功率邊界保護和可接受的駕駛性兩方面一直是行業的有個難題。
尤其對于多電機串并聯四驅拓撲結構,各個電機實際功率都會相互影響彼此的功率邊界,是一個相互影響的多層閉環控制,某一個高壓部件功率抖動都會影響其他部件的抖動(圖18)。因此,在極低溫度時電池輸入輸出功率受限,并且拓撲結構中存在多電機耦合時,更容易造成電池過充過放以及駕駛性抖動。
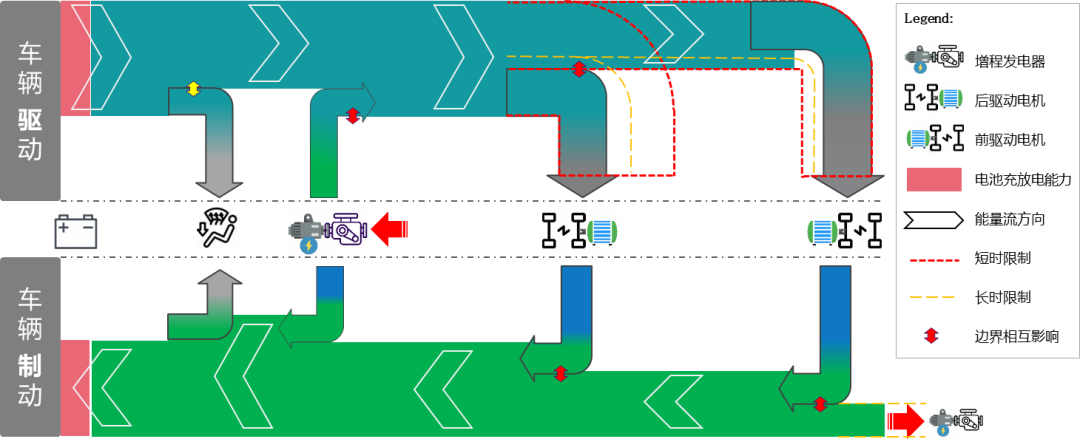
圖18?多電機串并聯四驅拓撲功率邊界影響示意圖
針對多電機耦合的混動系統,通過大量策略優化以及低溫駕駛性試驗驗證對比,軟件將電池長時功率進行動態邊界調節,在扭矩結構以及模式切換過程中,用電機長時扭矩邊界對駕駛員驅動需求進行限制,用電機短時扭矩邊界對類似ESP干涉、發動機啟動預留等扭矩需求進行限制,保證滿足駕駛需求的同時,不會出現電池過充過放的情況。通過電池功率預測,電池限制功率閉環調節,以及預測功率變化趨勢提前收窄或放寬功率限制邊界等方式。很好的解決了低溫環境下兼顧功率保護和駕駛性的效果(圖19)。
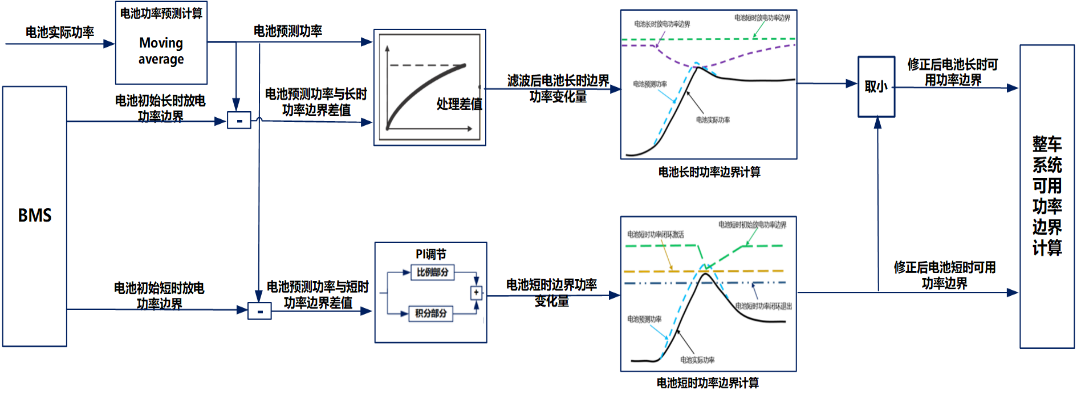
圖19?功率閉環保護功能框架
以低溫環境下起步全油門加速工況為例,通過上述軟件優化措施,當低溫工況發電機實際功率波動情況下,也可以保證電池功率不過放,并且前后電機準確響應扭矩邊界限制,避免駕駛抖動的發生(圖20)。
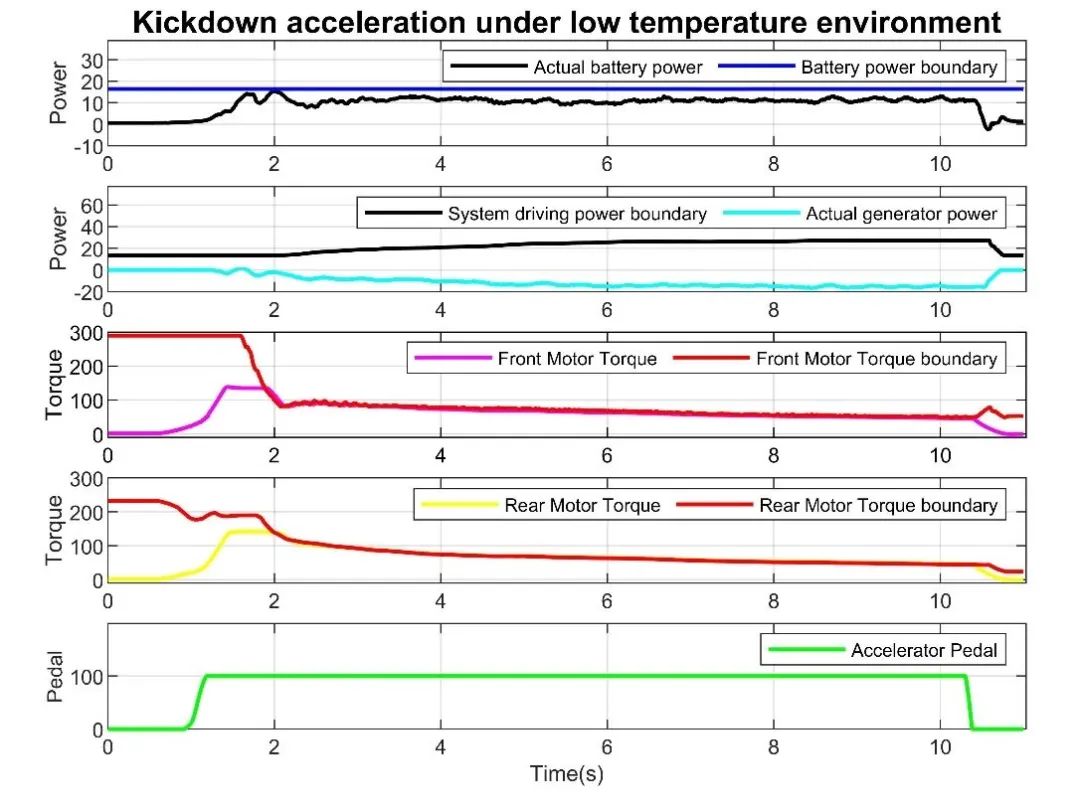
圖20?低溫全油門加速駕駛性實測效果
故障診斷和響應
新能源汽車的動力和高壓部件比傳統車多很多,車輛可能發生的故障類型和數量以及不同場景下(駐車、充電、行車等)的故障發生后的后處理的方式也很多。故障診斷的及時性、故障后處理的合理性對駕駛員的駕駛體驗和車輛安全性都有很大的影響。
基于對整車所有驅動部件的700多個故障原因和影響梳理,結合整車可能的故障響應方式,軟件針對不同場景下發生故障的嚴重性,設計了多個等級的故障響應方式。在確保車輛安全的前提下,盡可能做到了駕駛體驗的友好性。此外VCU作為整車OBD的主控制器,根據法規實現了不同部件發生故障發生后的亮燈需求協調和故障提示功能(圖21)。
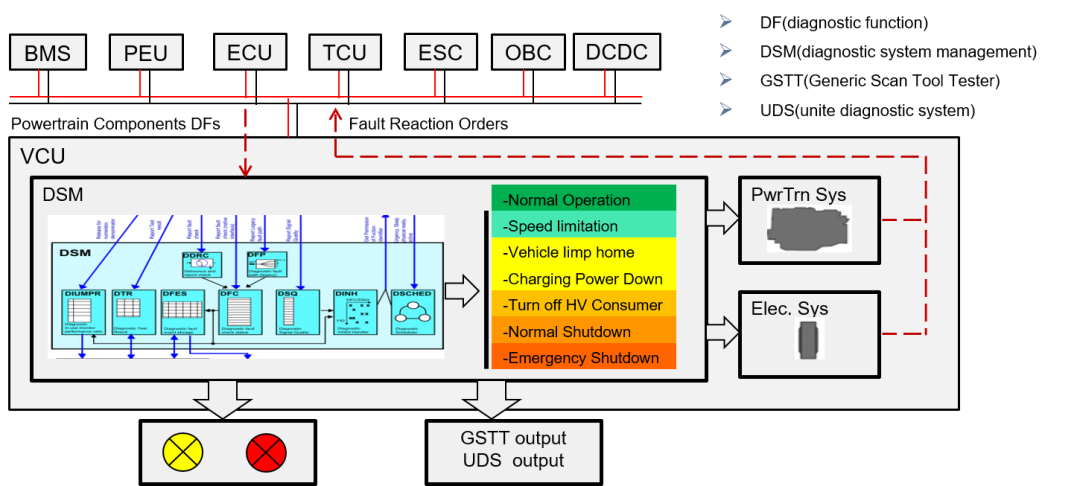
圖21?故障診斷和響應功能框架
?對客戶的收益?
VCU8.5整車運動域控制器平臺憑借強大的性能和豐富的功能,依托本地研發團隊的強力支持和快速響應,滿足客戶日益豐富的需求和更高的質量要求。
豐富的硬件資源,有助于客戶根據項目需求進行配置擴展開發
基于整車電子電氣架構發展趨勢,融合動力域和部分底盤域功能,實現底盤域部分功能的冗余控制和備份
靈活的合作開發模式,支持客戶化自主應用開發及第三方軟件集成導入
100%本地開發和生產,快速靈活支持和響應客戶
強大的功能安全和信息安全設計保障系統可靠運行
豐富的控制器生產制造經驗和自動化生產率保障硬件質量
SOP后可進行FOTA備份刷新,以提升車輛性能和終端客戶功能體驗
審核編輯:黃飛
?





















 工商網監
工商網監
評論