大連理工大學(xué)“飛馳”隊(duì)進(jìn)行了智能模型車系統(tǒng)開(kāi)發(fā)與研究工作,主要工作包括車體改裝、系統(tǒng)硬件及軟件設(shè)計(jì)和控制算法研究等。內(nèi)容安排如下:本章為引言,介紹了智能汽車的發(fā)展?fàn)顩r主要技術(shù);第二章闡述了模型車
2011-07-25 19:20:35
智能車制作,看看吧
2013-07-17 23:10:05
智能車新規(guī)則還變不變啊
2012-11-08 13:42:47
智能車的源程序
2012-08-31 18:09:39
智能車設(shè)計(jì) 大家看看
2013-10-11 13:13:55
基于光電導(dǎo)航的無(wú)人駕駛智能車下個(gè)月學(xué)校舉行這個(gè)智能車比賽,比在相同路段跑的時(shí)間,看到這個(gè)題目,沒(méi)有任何思路。。望高手指教下,原理圖,設(shè)計(jì)思路。。都可以!!謝謝~
2013-04-03 22:47:19
基于光電導(dǎo)航的無(wú)人駕駛智能車下個(gè)月學(xué)校舉行這個(gè)智能車比賽,比在相同路段跑的時(shí)間,看到這個(gè)題目,沒(méi)有任何思路。。望高手指教下,原理圖,設(shè)計(jì)思路。。都可以!!謝謝~
2013-04-03 22:53:19
把學(xué)習(xí)板搞成一個(gè)紅外遙控,重力遙控,追光,跟蹤,避障,循跡智能車,還具有傳統(tǒng)開(kāi)發(fā)板的其他功能
2013-10-28 13:29:51
求一個(gè)智能車的程序,有一個(gè)L298N驅(qū)動(dòng),紅外傳感器,舵機(jī)模塊的
2013-08-27 22:35:47
簡(jiǎn)易智能車元件,制作及開(kāi)源代碼,謝謝!那
2016-04-07 18:00:18
智能車DIY資料,新手入門級(jí)的科普資料.
2013-06-16 15:41:21
智能車PID+算法實(shí)現(xiàn)原理講解
2015-04-20 18:26:39
朋友組隊(duì)前言 此篇獻(xiàn)給GDOU的學(xué)子們,或許不是那么政治正確一、智能車是什么智能車總體概要智能車是大學(xué)生團(tuán)體比賽,通常由三個(gè)人組成隊(duì)伍。涉及多個(gè)領(lǐng)域的知識(shí),包括計(jì)算機(jī)編程,涉及電路板,隊(duì)友間的團(tuán)隊(duì)協(xié)作,控制算法等。參加比賽的周期是比較長(zhǎng)的,涉及的領(lǐng)域如此之多,需要跨不同學(xué)科,因此需要投入的時(shí)間是比較多的
2022-01-17 07:48:55
等方面。小結(jié)本章重點(diǎn)分析了智能車系統(tǒng)總體方案的選擇,并介紹了系統(tǒng)的總體設(shè)計(jì),以及簡(jiǎn)要地分析了系統(tǒng)各模塊的作用。在今后的章節(jié)中,將對(duì)整個(gè)系統(tǒng)機(jī)械結(jié)構(gòu)、控制模塊和控制算法等三個(gè)方面的實(shí)現(xiàn)進(jìn)行詳細(xì)介紹。第二章
2013-05-07 23:40:08
智能車源程序+很詳細(xì)
2012-08-18 07:42:26
智能車的資料,有點(diǎn)亂啊。。。。。
2016-05-26 12:24:57
1、智能車目標(biāo)識(shí)別系統(tǒng)的實(shí)現(xiàn) 首先,簡(jiǎn)單介紹一下上面提到的各個(gè)話題的范圍 (Domain),人工智能 (Artifitial Intelligence)是最大的話題,如果用一張圖來(lái)說(shuō)明的話
2022-09-06 14:54:26
智能車競(jìng)賽專題培訓(xùn)
2012-08-19 23:36:39
算法的參考B站工訓(xùn)大魔王的【智能車制作加餐:攝像頭數(shù)字圖像處理算法-嗶哩嗶哩】 具體代碼如下。// An highlighted block
2022-09-24 15:05:15
各位精英們!請(qǐng)問(wèn)如何寫計(jì)劃方案?要做智能車的計(jì)劃方案?拜托各位熱心幫助一下?
2012-04-08 13:04:40
智能車設(shè)計(jì)基礎(chǔ) 第10章.rar http://filemarkets.com/file/bai2471/9d9e6c95/智能車設(shè)計(jì)基礎(chǔ) 第3章.rar: http://www.t00y.com
2012-10-21 21:11:12
智能車創(chuàng)意組識(shí)別圖an用openmv 還是用 opencv 比較好
2023-10-24 06:24:31
智能車輛系統(tǒng)辨識(shí)與控制算法研究
2012-09-08 10:55:06
最近要做個(gè)智能車,大家給推薦想用AVR的單片機(jī),但是不知道那幾個(gè)型號(hào)的,請(qǐng)大家給點(diǎn)建議唄
2013-03-28 19:44:05
暑假想自己DIY一個(gè)智能車暑假想自己DIY一個(gè)STM32智能車嵌入式一嵌入式硬件二嵌入式軟件功能快捷鍵合理的創(chuàng)建標(biāo)題,有助于目錄的生成如何改變文本的樣式插入鏈接與圖片如何插入一段漂亮的代碼片生成一個(gè)
2022-01-10 07:06:50
PID的智能車控制算法研究
2016-07-18 20:07:41
不錯(cuò)的資料,智能車黑線識(shí)別算法及控制策略研究
2015-09-09 12:17:33
求大神 給個(gè) 關(guān)于智能車仿真的labview程序
2016-05-04 13:04:38
最近在做智能車的材料,想用Labview實(shí)現(xiàn)控制,發(fā)現(xiàn)了例程中的這個(gè)用模糊算法控制倒車的程序文件,感覺(jué)受益很大,特意發(fā)到這里,希望有需要的同學(xué)也能有點(diǎn)收獲。
2016-02-05 14:55:05
項(xiàng)目名稱:智能遠(yuǎn)程無(wú)線操控智能車試用計(jì)劃:每一個(gè)工程師都有一個(gè)智能車的夢(mèng),而我的夢(mèng),就是打造一個(gè)可以遠(yuǎn)程操控的智能車,試想一下,當(dāng)一個(gè)普通的遙控車實(shí)現(xiàn)了遠(yuǎn)程操作會(huì)怎樣? 意味著你可以在辦公室操控你家
2020-11-11 10:37:46
目錄第4篇實(shí)戰(zhàn)案例篇第16章 智能車控制系統(tǒng) 該書叫什么名字
2015-04-25 15:15:52
智能車設(shè)計(jì)報(bào)告設(shè)計(jì)目標(biāo): 小車能夠檢測(cè)20khz的信號(hào)源 并以較快的速度沿著信號(hào)線移動(dòng)。總體方案設(shè)計(jì):總體分為硬件軟件兩部分硬件部分:(1):驅(qū)動(dòng)系統(tǒng) (2):轉(zhuǎn)向系統(tǒng) (3):電源 (4):信號(hào)
2021-08-23 07:19:49
本文將從該智能車總體方案、路徑識(shí)別方案選擇、轉(zhuǎn)向和驅(qū)動(dòng)控制及路徑記憶算法等方面進(jìn)行介紹。
2021-05-18 06:01:07
智能車系統(tǒng)以—個(gè)標(biāo)準(zhǔn)的汽車模型作為載體,要求實(shí)現(xiàn)在白色場(chǎng)地上,通過(guò)轉(zhuǎn)向和車速的控制 ,使其自動(dòng)地沿著一條任意給定的黑色帶狀引導(dǎo)線行駛,在保證穩(wěn)定性的前提下以最短的時(shí)間完成 自動(dòng)尋跡。在該智能車系統(tǒng)中
2023-09-19 08:03:50
中,用戶可以調(diào)用這些文件,對(duì)其仿真結(jié)果進(jìn)行后期分析和處理,從而可以更準(zhǔn)確地發(fā)現(xiàn)問(wèn)題,指導(dǎo)賽車設(shè)置和控制算法的優(yōu)化。成果通過(guò)測(cè)試和對(duì)比,Plastid智能車仿真平臺(tái)可以有效地仿真出賽車的實(shí)際行駛路線以及
2019-04-08 09:40:07
基于HOLTEK單片機(jī)的智能車
2014-05-17 17:37:23
前言:這是我寫的RTT系統(tǒng)技術(shù)報(bào)告的大綱,基本都是廢話 ,發(fā)出來(lái)留作筆記。基于RT-Thread和主從雙機(jī)的麥克納姆輪智能車的設(shè)計(jì)與實(shí)現(xiàn)封面略過(guò)研究論文使用授權(quán)書略過(guò)目錄文章目
2022-02-25 07:30:46
求各位大神分享資料軟件實(shí)現(xiàn)智能車的控制系統(tǒng)飛思卡爾
2015-04-26 23:15:19
基于光電導(dǎo)航的無(wú)人駕駛智能車下個(gè)月學(xué)校舉行這個(gè)智能車比賽,比在相同路段跑的時(shí)間,看到這個(gè)題目,沒(méi)有任何思路。。望高手指教下,原理圖,設(shè)計(jì)思路。。都可以!!謝謝~
2013-04-10 10:19:23
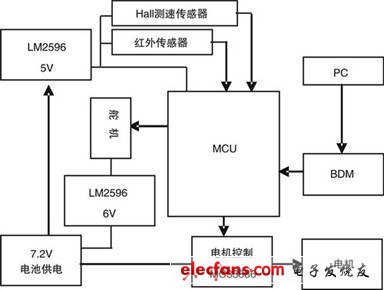
的舵機(jī)驅(qū)動(dòng)前輪轉(zhuǎn)向,使用符合PI算法的控制器實(shí)現(xiàn)直流電機(jī)的調(diào)速。為了使智能車快速、平穩(wěn)地行駛,系統(tǒng)必須把路徑識(shí)別、相應(yīng)的轉(zhuǎn)向伺服電機(jī)控制以及直流驅(qū)動(dòng)電機(jī)控制準(zhǔn)確地結(jié)合在一起。 1 硬件設(shè)計(jì) 本系統(tǒng)硬件
2018-11-06 15:08:45
作為一名練習(xí)時(shí)長(zhǎng)兩年半的練習(xí)生,來(lái)淺談下第十五屆智能車競(jìng)賽規(guī)則。第十五屆智能車受疫情影響,終于在千呼萬(wàn)喚中姍姍來(lái)遲。細(xì)讀規(guī)則,便會(huì)發(fā)現(xiàn)今年的智能車和往年有所不同。今年的組別設(shè)置有競(jìng)速組4組:基礎(chǔ)四輪
2021-09-02 06:29:54
設(shè)計(jì)一種集紅外遙控、 黑線循跡、自動(dòng)泊車、車速檢測(cè)、行駛路程顯示等功能于一體的智能車。主要使用了紅外傳感技術(shù),并結(jié)合 STM32F103 系列芯片,模擬現(xiàn)代新型汽車的自動(dòng)駕駛功能。 采用槽型對(duì)射光電
2019-02-28 20:07:06
我們要設(shè)計(jì)的智能車具有多種功能,可實(shí)現(xiàn)wifi遠(yuǎn)程控制,主人可遠(yuǎn)程監(jiān)控并控制房屋內(nèi)的各種設(shè)置
2013-10-20 11:13:08
labview程序控制NI智能車,怎么控制該智能車轉(zhuǎn)彎時(shí)的角度沒(méi)有大的偏差??老師給的程序看不懂?程序如圖
2016-12-15 23:09:00
如何利用CH32V103R8T6和RT-Thread實(shí)現(xiàn)智能視覺(jué)組智能車的設(shè)計(jì)?
2021-10-21 08:33:38
智能車系統(tǒng)是由哪些模塊組成的?如何利用MCU核心板去實(shí)現(xiàn)智能車系統(tǒng)設(shè)計(jì)?
2021-10-26 08:06:54
如何利用RT-Thread操作系統(tǒng)實(shí)現(xiàn)四輪組智能車的設(shè)計(jì)?
2021-10-21 06:33:27
巡線智能車控制中的CNN網(wǎng)絡(luò)有何應(yīng)用?嵌入式單片機(jī)中的神經(jīng)網(wǎng)絡(luò)該怎樣去使用?如何利用卷積神經(jīng)網(wǎng)絡(luò)去更好地控制巡線智能車呢?
2021-12-21 07:47:24
如何制作一輛智能車?
2022-02-15 07:39:21
如何去實(shí)現(xiàn)一種基于STM32F103ZET6和L298N的智能車設(shè)計(jì)?
2021-12-21 07:35:17
如何快速入門智能車呢?有哪些方法呢?
2021-11-01 07:52:06
的功能吧:基于51單片機(jī),利用火焰感應(yīng)、溫度傳感、GSM、尋跡和驅(qū)動(dòng)等多個(gè)模塊,實(shí)現(xiàn)對(duì)倉(cāng)庫(kù)或有毒易燃物品的無(wú)人化二十四小時(shí)監(jiān)控,更靈敏更經(jīng)濟(jì)。可以實(shí)現(xiàn)智能車在閉環(huán)控制以及接受智能車對(duì)于倉(cāng)庫(kù)的監(jiān)控信息反饋
2014-04-29 00:11:42
怎么實(shí)現(xiàn)智能車磁導(dǎo)航中的信號(hào)調(diào)理電路設(shè)計(jì)?智能車控制電路對(duì)檢測(cè)信號(hào)的要求是什么?
2021-05-12 06:04:02
本文介紹了一種智能車控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)方法。通過(guò)大量實(shí)驗(yàn)測(cè)試證明,該智能車能快速平穩(wěn)地在制作的賽道上跟蹤黑色引導(dǎo)線并行駛,而且尋跡效果良好,控制響應(yīng)速度快,動(dòng)態(tài)性能良好,穩(wěn)態(tài)誤差小,系統(tǒng)的穩(wěn)定性和抗干擾能力強(qiáng)。
2021-05-18 06:46:48
本文采用通電導(dǎo)線產(chǎn)生的電磁場(chǎng)對(duì)智能車進(jìn)行引導(dǎo)。使用磁場(chǎng)信號(hào)引導(dǎo)車沿一定軌跡行走的優(yōu)點(diǎn)主要體現(xiàn)在磁場(chǎng)信號(hào)具有很好的環(huán)境適應(yīng)性,不受光線、溫度、濕度等環(huán)境因素的影響。
2021-05-14 07:15:18
智能車競(jìng)賽背景全國(guó)大學(xué)生智能車競(jìng)賽是一項(xiàng)舉辦了十四屆的大學(xué)生自動(dòng)控制類科技競(jìng)賽,它要求指定的車模能夠在規(guī)定的賽道上實(shí)現(xiàn)路徑識(shí)別、自主尋跡,并快速行駛。麻雀雖小,五臟俱全,雖然競(jìng)賽智能車沒(méi)有現(xiàn)實(shí)生活中
2021-07-29 06:00:40
本文開(kāi)發(fā)了一種基于光電傳感和路徑記憶的智能車導(dǎo)航系統(tǒng)。
2021-05-12 07:04:03
基于AVR單片機(jī)的無(wú)線語(yǔ)音遙控智能車是由哪些部分組成的?怎樣去設(shè)計(jì)一種基于AVR單片機(jī)的無(wú)線語(yǔ)音遙控智能車?
2021-09-22 08:00:22
什么是雙車規(guī)則?怎樣去設(shè)計(jì)一款基于傳感器的智能車?
2021-10-18 13:19:13
新人求助帖本人新手,對(duì)于智能車有很大興趣,現(xiàn)想做一輛光電管的智能車,請(qǐng)問(wèn)各位大神,我應(yīng)該購(gòu)買哪些材料?
2014-04-12 14:27:59
目 錄0 前言22 無(wú)線語(yǔ)音遙控智能車設(shè)計(jì)概述42.1 設(shè)計(jì)目的42.2 設(shè)計(jì)實(shí)現(xiàn)總體功能43 系統(tǒng)總體方案53.1 方案論證53.1.1 方案一53.1.2 方案二53.1.3 方案三53.2
2012-07-31 22:12:51
;catid=57樹(shù)莓派智能車AlphaBot教程1:人生若只如初見(jiàn) ...樹(shù)莓派智能車AlphaBot教程2:直流電機(jī)控制 ... 樹(shù)莓派智能車AlphaBot教程3:避障樹(shù)莓派智能車AlphaBot
2017-05-15 15:39:34
做一個(gè)攝像頭的智能車
2014-10-14 11:31:45
求一套智能車設(shè)計(jì),本人想要做智能車方面的,借鑒一下。
2015-11-10 00:37:42
求大佬分享智能車K60學(xué)習(xí)筆記
2022-02-07 07:50:07
大神們,誰(shuí)有閑置的智能車,賣給我這窮學(xué)生吧!
2015-03-31 16:32:52
對(duì)于智能車的電機(jī)閉環(huán)控制算法,我之所以標(biāo)題沒(méi)有寫上“智能車電機(jī)PID閉環(huán)控制算法”是因?yàn)镻ID 算法根本就不是特別好的適用于智能車這種變化很快的系統(tǒng),對(duì)于智能車,電機(jī)的調(diào)速可以說(shuō)是時(shí)時(shí)刻刻再進(jìn)行調(diào)速
2020-06-22 15:36:32
電動(dòng)智能車的硬件設(shè)計(jì)與方法測(cè)試80C51單片機(jī)是一款八位單片機(jī),他的易用性和多功能性受到了廣大使用者的好評(píng)。這里介紹的是如何用80C51單片機(jī)來(lái)實(shí)現(xiàn)長(zhǎng)春工業(yè)大學(xué)的畢業(yè)設(shè)計(jì),該設(shè)計(jì)是結(jié)合科研項(xiàng)目而確定
2009-12-07 17:22:30
我的第一輛智能車—電磁循跡智能車以下是所用的模塊:舵機(jī),電機(jī),L298N驅(qū)動(dòng)模塊,PID算法,OLED,電磁桿,ADC多路采集配置DMA,干簧管,普通GPIO口使用。1.舵機(jī)模塊舵機(jī),三條線路,一條
2022-01-14 09:08:34
雙車會(huì)車組很多車輛的圓環(huán)出跑出賽道,導(dǎo)致比賽失敗,會(huì)車點(diǎn)基本都可以完成,圓環(huán)依舊是智能車行駛的難點(diǎn)。有的隊(duì)伍為了保證圓環(huán)可以順利通過(guò),在圓環(huán)周圍擺放抹布,進(jìn)行反光遮擋,依然跑出賽道。第13屆智能車
2018-08-25 13:21:12
想要做一個(gè)智能車,但是不知道怎么動(dòng)手,特別是不知道在哪里可以買到芯片。而且我是一個(gè)小白,沒(méi)有做過(guò)單片。求組隊(duì)?
2015-06-17 13:40:12
設(shè)計(jì)目標(biāo):①軟件設(shè)計(jì)基于單片機(jī)的智能車系統(tǒng);②實(shí)現(xiàn)操作界面登錄功能;③實(shí)現(xiàn)管理員操作系統(tǒng)界面功能;④實(shí)現(xiàn)用戶操作系統(tǒng)界面功能;⑤實(shí)現(xiàn)智能車控制系統(tǒng)界面功能。求各位大神指點(diǎn)迷津,先實(shí)現(xiàn)無(wú)線遙控模塊
2015-04-26 20:55:15
設(shè)計(jì)目標(biāo):軟件設(shè)計(jì)基于單片機(jī)的智能車系統(tǒng)(飛思卡爾)如何實(shí)現(xiàn)上位機(jī)與下位機(jī)之間的通信
2015-04-21 23:13:14
網(wǎng)上的資料,舵機(jī)好像只能實(shí)現(xiàn)一個(gè)方向轉(zhuǎn),可是某些智能車怎么怎么依靠舵機(jī)實(shí)現(xiàn)左右轉(zhuǎn)向呢???
2019-06-24 00:23:41
新人小白,想做智能車,不知道從哪入手?(學(xué)過(guò)一點(diǎn)51)
2019-03-26 07:23:20
資源分享:智能車設(shè)計(jì)
2019-03-22 22:42:48
采用光電傳感器的智能車控制研究
2012-08-20 13:05:43
飛思卡爾智能車控制PWM的引腳在哪
2017-02-28 19:49:16
誰(shuí)有智能車的芯片K60的資料啊?麻煩發(fā)一份,謝謝。
2013-01-12 17:10:40
基于間接PID的智能車控制算法研究,感興趣的小伙伴們可以瞧一瞧。
2016-11-18 17:59:13 2
2 一種光電智能車尋跡算法的研究,感興趣的小伙伴們可以瞧一瞧。
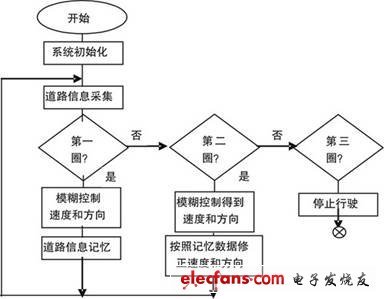
2016-11-11 18:18:3242 飛思卡爾杯全國(guó)大學(xué)生智能車競(jìng)賽規(guī)則明確指出,智能車在賽道上連續(xù)跑兩圈,并記錄其中最好的單圈成績(jī),這使路徑記憶算法成為可能。如圖1所示,賽道記憶算法在第一圈以最安全的速度緩慢駛過(guò)一圈,并將賽道信息保存
2017-09-06 15:26:482 研究一種具有路徑記憶功能的智能車控制系統(tǒng)。該智能車使用紅外光電傳感器實(shí)現(xiàn)路徑識(shí)別,依靠電機(jī)驅(qū)動(dòng)前進(jìn),使用舵機(jī)幫助智能車轉(zhuǎn)向。該系統(tǒng)采用路徑記憶算法對(duì)智能車進(jìn)行控制,將記憶下的賽道信息作為主要控制信息,通過(guò)提前判斷彎道的曲率大小,從而得到一個(gè)最佳過(guò)彎速度,使其運(yùn)行更平穩(wěn)、快速。
2018-12-07 17:20:4816 電子發(fā)燒友網(wǎng)站提供《智能車賽道記憶算法的研究.pdf》資料免費(fèi)下載
2023-11-02 09:42:550
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論