本文通過(guò)分析EPS的基本原理。市場(chǎng)以及技術(shù)優(yōu)勢(shì),結(jié)合英飛凌.TI.飛思卡爾等半導(dǎo)體廠商的EPS方案研發(fā)現(xiàn)狀,給出基于ADI BF506F的EPS方案和技術(shù)評(píng)估。
2013-07-18 13:44:15 2866
2866 
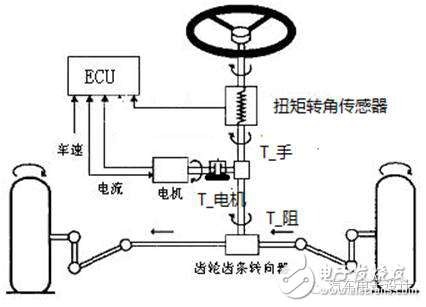
。EPS主要由三大部分組成,包括信號(hào)傳感裝置(包括扭矩傳感器、方向盤(pán)角度傳感器和車(chē)速傳感器),電子控制單元和轉(zhuǎn)向助力機(jī)構(gòu)(電機(jī)、離合器、減速傳動(dòng)機(jī)構(gòu)等)。其中電子控制單元(ECU)是系統(tǒng)的核心部件,承擔(dān)著處理傳感器信號(hào)、執(zhí)行控制策略、輸出控制信號(hào)驅(qū)動(dòng)電機(jī)、系統(tǒng)監(jiān)控診斷和通信的重任。
2019-07-10 07:17:39
求助,EPS32開(kāi)機(jī)時(shí)出現(xiàn)如下錯(cuò)誤打印,請(qǐng)問(wèn)怎么定位以及解決CORRUPT HEAP: multi_heap.c:431 detected at 0x3ffd1b18
2023-02-21 07:46:56
控制負(fù)荷和動(dòng)力負(fù)荷以及直流事故照明負(fù)荷等提供電源,是當(dāng)代電力系統(tǒng)控制、保護(hù)的基礎(chǔ)。直流屏由交配電單元、充電模塊單元、降壓硅鏈單元、直流饋電單元、配電監(jiān)控單元、監(jiān)控模塊單元及絕緣監(jiān)測(cè)單元組成。主要應(yīng)用于
2017-03-23 10:00:19
EPS應(yīng)急電源主要用于消防行業(yè)的電氣設(shè)備,用作應(yīng)急電源在市電停電或故障以后的備用電源。使用范圍主要在建筑工程,消防系統(tǒng)民用等領(lǐng)域使用。耀亮EPS應(yīng)急電源的工作原理有些類(lèi)似后備式UPS或逆變器,市電
2017-03-22 15:17:57
。 EPS應(yīng)急電源為應(yīng)用逆變技術(shù),采取CPU控制、數(shù)字化電路、高集成度電子元件生產(chǎn)出的高科技環(huán)保型產(chǎn)品,其主要由逆變器、輔助電源、整流充電器、蓄電池、控制器等組成,為一、二級(jí)負(fù)荷和特別重要用電設(shè)備
2018-10-23 16:09:05
EPS系統(tǒng)的工作原理是什么?EPS系統(tǒng)的結(jié)構(gòu)是怎樣構(gòu)成的?EPS系統(tǒng)有哪幾種控制方式?
2021-05-12 06:53:52
雷電造成損壞的;(六)操作人員頻繁操作EPS應(yīng)急電源的強(qiáng)制啟動(dòng)功能,而且使蓄電池放電深度太大,從而損壞了蓄電池。(七)春夏季節(jié)空氣潮濕(特別是 地下室 ),這使EPS應(yīng)急電源內(nèi)部控制 電路板 上結(jié)露
2019-02-28 14:12:07
差異的。第三、EPS采用離線式供電,是最后一道供電保障。市電出現(xiàn)故障時(shí),如果EPS不能通過(guò)蓄電池應(yīng)急供電,就如同虛設(shè)一般,造成的后果將不堪設(shè)想。而UPS采用的是在線式,即便出現(xiàn)故障,可以及時(shí)報(bào)警,加上
2019-03-04 14:07:16
使用,從而避免OOM。弱引用:當(dāng)垃圾回收器回收內(nèi)存時(shí),如果發(fā)現(xiàn)弱引用,則將它立即回收。相對(duì)于軟引用,弱引用有更短的生命周期。 回收算法使用基于空間和基于容量的緩存會(huì)使用一定的策略移除舊數(shù)據(jù),常見(jiàn)的如
2021-01-14 17:08:56
車(chē)載Flex Ray網(wǎng)絡(luò)管理策略的初步研究網(wǎng)絡(luò)管理的目標(biāo)是保障網(wǎng)絡(luò)可靠、有效地運(yùn)行。在一般的計(jì)算機(jī)網(wǎng)絡(luò)中,網(wǎng)絡(luò)管理包含配置管理、性能管理及安全管理。車(chē)載網(wǎng)絡(luò)是面向?qū)崟r(shí)控制的一類(lèi)網(wǎng)絡(luò),因此它采取的網(wǎng)絡(luò)
2009-11-26 17:11:23
多媒體技術(shù)套件以及數(shù)據(jù)庫(kù)服務(wù)器(DB)。該策略使我們能夠提供HMI與基礎(chǔ)部件相互獨(dú)立的架構(gòu):Web kit(瀏覽器)、藍(lán)牙、GPS、音頻控制以及多媒體套件。HMI設(shè)計(jì)師可以創(chuàng)建和實(shí)現(xiàn)各種自定義數(shù)量的用戶
2019-05-16 10:44:48
車(chē)載操作系統(tǒng)的調(diào)度算法分析與改進(jìn),不看肯定后悔
2021-05-14 06:42:15
車(chē)載移動(dòng)異構(gòu)無(wú)線網(wǎng)絡(luò)架構(gòu)及關(guān)鍵技術(shù)是什么?
2021-06-07 06:29:57
常用的控制算法有哪幾種?各自有什么特點(diǎn)?PID控制算法的基本思想是什么?PID控制算法是如何形成的?
2021-06-30 06:04:40
RJMU401在車(chē)載T-BOX中國(guó)密算法的流程是怎樣的?RJMU401在車(chē)載T-BOX中國(guó)密算法中有何作用?
2021-10-22 08:53:20
簡(jiǎn)要文檔說(shuō)明算法介紹算法架構(gòu)如下所示,其中采用SVPWM矢量控制,id=0。主要包括三個(gè)部分:轉(zhuǎn)速環(huán)PI調(diào)節(jié)器,電流環(huán)PI調(diào)節(jié)器,SVPWM算法等。主要參數(shù)計(jì)算3.1 轉(zhuǎn)速環(huán)ADRC理論分析請(qǐng)
2021-08-27 07:41:58
不錯(cuò)的資料,智能車(chē)黑線識(shí)別算法及控制策略研究
2015-09-09 12:17:33
全級(jí)別的車(chē)載系統(tǒng)。因此,新產(chǎn)品十分適用于采用直流無(wú)刷電機(jī)的車(chē)載應(yīng)用,例如EPS、電動(dòng)制動(dòng)和線控?fù)Q檔系統(tǒng)。對(duì)于EPS等需要安全繼電器的系統(tǒng)而言,TB9083FTG內(nèi)置3通道柵極驅(qū)動(dòng),以用于控制和驅(qū)動(dòng)電機(jī)
2023-02-28 14:11:51
主動(dòng)隊(duì)列管理建模及最優(yōu)控制策略針對(duì)主動(dòng)隊(duì)列管理(AQM)研究中缺乏系統(tǒng)的理論分析的問(wèn)題,引入最優(yōu)控制理論進(jìn)行分析,得到了主動(dòng)隊(duì)列管理的數(shù)學(xué)模型,該模型包括兩個(gè)差分方程,分別描述隊(duì)列長(zhǎng)度和平均隊(duì)列長(zhǎng)度
2009-06-14 00:14:59
什么是PID控制算法呢?PID控制算法有何作用?PID控制算法有哪幾種類(lèi)型呢?如何對(duì)其進(jìn)行測(cè)試?
2022-02-25 07:36:44
什么是恒壓頻比控制策略?
2021-10-22 08:39:59
蛋蛋彈車(chē)3-具有功能安全EPS系統(tǒng)設(shè)計(jì)(電機(jī)控制算法-PID)前言一、直軸交軸PI控制二、Simulink中搭建電機(jī)PID控制器三,具體結(jié)果計(jì)算總結(jié)前言無(wú)論在電機(jī)控制還是別的一般工業(yè)控制中,PID
2021-09-15 08:47:43
器對(duì)基于軟件的算法處理進(jìn)行編譯,微控制器可以在其地址空間中看到FPGA/MP模塊,并采用分布式DMA架構(gòu)優(yōu)化功能和存儲(chǔ)器模塊之間的數(shù)據(jù)流。圖1顯示了硬件/軟件劃分以及使用IP模塊庫(kù)來(lái)實(shí)現(xiàn)算法的整個(gè)步驟,IP
2008-09-27 11:42:55
駕駛員對(duì)路感的要求。 電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)主要包括傳感器、控制器和執(zhí)行器三大部件。傳感器將采集到的信號(hào)經(jīng)過(guò)相應(yīng)處理后輸人到控制器,控制器運(yùn)行內(nèi)部控制算法,向執(zhí)行器發(fā)出指令,控制執(zhí)行器的動(dòng)作
2012-08-10 10:23:04
跪求四旋翼飛機(jī)PID控制以及姿態(tài)控制算法等MATLAB仿真資料,謝謝
2015-07-17 11:33:09
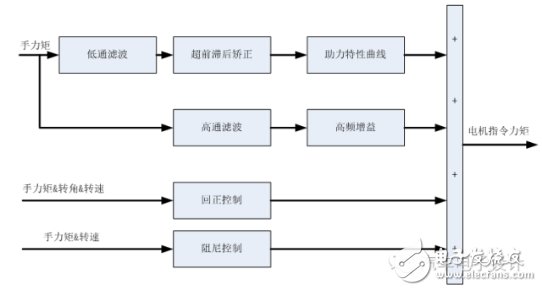
的準(zhǔn)確性而被越來(lái)越多的EPS系統(tǒng)采用。2. 控制策略:傳統(tǒng)的轉(zhuǎn)向系統(tǒng)主要為駕駛員提供轉(zhuǎn)向助力,減輕其轉(zhuǎn)向負(fù)擔(dān),EPS系統(tǒng)還要解決諸如高速行駛過(guò)程中轉(zhuǎn)向過(guò)大,回正等影響車(chē)輛穩(wěn)定性和安全性的問(wèn)題,故而需要
2018-12-06 09:58:07
越來(lái)越多的EPS系統(tǒng)采用。2、控制策略:傳統(tǒng)的轉(zhuǎn)向系統(tǒng)主要為駕駛員提供轉(zhuǎn)向助力,減輕其轉(zhuǎn)向負(fù)擔(dān),EPS系統(tǒng)還要解決諸如高速行駛過(guò)程中轉(zhuǎn)向過(guò)大,回正等影響車(chē)輛穩(wěn)定性和安全性的問(wèn)題,故而需要一套高效完善
2018-12-05 09:49:23
,基礎(chǔ)軟件與應(yīng)用軟件分別實(shí)施,且從功能和執(zhí)行上分屬不同架構(gòu),能夠?qū)崿F(xiàn)單獨(dú)開(kāi)發(fā);4、在軟件架構(gòu)基礎(chǔ)上完成基礎(chǔ)軟件、底層驅(qū)動(dòng)、操作系統(tǒng)的配置開(kāi)發(fā)。5、完成應(yīng)用層軟件接口設(shè)計(jì),并開(kāi)發(fā)測(cè)試用軟件組件模塊;6、基于PowerFCU完成60KW車(chē)載水冷燃料電池系統(tǒng)控制策略開(kāi)發(fā);7、HIL臺(tái)架測(cè)試及匹配(含標(biāo)定
2021-09-13 08:00:56
新型逆變器控制策略的設(shè)計(jì)本文以高頻鏈逆變器為被控對(duì)象,在推導(dǎo)出被控對(duì)象的動(dòng)態(tài)模型后,提出了一種新型控制方案:即內(nèi)環(huán)電流環(huán)采用混合型PI-模糊控制策略,外環(huán)電壓環(huán)采用PI控制策略的瞬時(shí)值雙閉環(huán)控制方案.[hide][/hide]
2009-12-10 16:47:21
有關(guān)永磁同步電機(jī)控制策略的代碼有哪些?
2021-07-20 08:30:04
體現(xiàn)在EPS控制技術(shù)和系統(tǒng)安全設(shè)計(jì)兩方面。飛思卡爾半導(dǎo)體公司在2011年推出了“采用永磁同步電機(jī)的汽車(chē)電子助力轉(zhuǎn)向電控單元解決方案”,旨在幫助國(guó)內(nèi)EPS供應(yīng)商掌握永磁同步電機(jī)的控制技術(shù)。在2012年的飛
2014-08-26 16:23:29
2.永磁同步電機(jī)的矢量控制策略(二)對(duì)于正弦波永磁同步電機(jī),所有的矢量控制算法都是建立在電機(jī)的數(shù)學(xué)模型上。因此,有必要結(jié)合坐標(biāo)變換對(duì)永磁同步電機(jī)的數(shù)學(xué)模型進(jìn)行推導(dǎo),分別為三種不同坐標(biāo)系下的數(shù)學(xué)模型
2021-08-27 06:04:18
在cache的相關(guān)操作中,cache控制器需要根據(jù)需求做出許多不同的選擇。例如:分配策略是否需要將數(shù)據(jù)從主存中分配到cache中;替換策略組相聯(lián)cache中,所有的way都已經(jīng)有填充數(shù)據(jù)了,miss
2022-06-15 16:24:48
電子電氣架構(gòu)、車(chē)載操作系統(tǒng)、基礎(chǔ)軟件平臺(tái)等之間有什么關(guān)系?智能汽車(chē)軟件的范圍、軟硬件升級(jí)、SOA的內(nèi)涵詳細(xì)介紹SOA的實(shí)現(xiàn)細(xì)節(jié)是什么?
2021-09-26 08:25:17
第一步,認(rèn)識(shí)電池管理系統(tǒng)的硬件架構(gòu)圖1主板,作為BMS的大腦,會(huì)收集來(lái)自各個(gè)從板(通常叫LCU)的采樣信息,通過(guò)低壓電氣接口與整車(chē)進(jìn)行通訊,控制BDU(高壓分?jǐn)嗪校﹥?nèi)的繼電器動(dòng)作,實(shí)施監(jiān)控電池的各項(xiàng)
2021-09-15 08:20:21
本人學(xué)生,在實(shí)驗(yàn)室打算做EMD算法的硬件實(shí)現(xiàn),看了一些論文,感覺(jué)主要是單獨(dú)用FPGA實(shí)現(xiàn),或者用DSP+FPGA實(shí)現(xiàn)(DSP做EMD算法,F(xiàn)PGA做數(shù)據(jù)流控制),請(qǐng)問(wèn)大家用哪種架構(gòu)做硬件實(shí)現(xiàn)EMD算法比較好?
2018-04-25 21:04:33
如何選擇符合目標(biāo)系統(tǒng)規(guī)格以及標(biāo)準(zhǔn)的相應(yīng)架構(gòu)、電路和元件呢?這些是由電路滿足在效率、帶寬和精度方面提供系統(tǒng)所需性能,同時(shí)又滿足安全隔離要求來(lái)決定的。本文探討了系統(tǒng)架構(gòu)選擇對(duì)電源和控制電路設(shè)計(jì)以及系統(tǒng)性
2018-10-30 15:08:55
本項(xiàng)目主要以自平衡小車(chē)為原型,通過(guò)PDF控制策略來(lái)實(shí)現(xiàn)系統(tǒng)的平衡,核心原理為倒立擺,通過(guò)該系統(tǒng)來(lái)驗(yàn)證和分析PDF控制算法性能的優(yōu)缺點(diǎn)。同時(shí),該系統(tǒng)需要采用角加速度計(jì)和陀螺的數(shù)據(jù)融合,通過(guò)卡爾曼濾波
2013-10-28 18:40:19
EPS的工作原理是什么?EPS的結(jié)構(gòu)是由哪些部分組成的?怎樣去設(shè)計(jì)基于ARM單片機(jī)的汽車(chē)電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)?
2021-05-10 07:04:21
調(diào)度算法是什么?車(chē)載操作系統(tǒng)內(nèi)核調(diào)度策略應(yīng)注意哪些問(wèn)題?
2021-05-13 07:02:11
概述經(jīng)緯恒潤(rùn)自 2006 年成立 EPS 團(tuán)隊(duì)以來(lái),采用國(guó)際標(biāo)準(zhǔn)和先進(jìn)技術(shù),開(kāi)發(fā)了針對(duì)低成本應(yīng)用的匹配有刷電機(jī)的 EPS 和針對(duì)高端應(yīng)用的匹配無(wú)刷電機(jī)的 EPS,產(chǎn)品類(lèi)型包括分體式
2022-04-12 10:40:36
當(dāng)前IPsec 的策略系統(tǒng)的策略設(shè)置方式很可能引起策略沖突。在分析和比較現(xiàn)有策略生成算法的基礎(chǔ)上,提出了右對(duì)齊策略生成算法,在有效解決策略沖突,獲得最少生成策略數(shù)的基
2009-06-26 08:36:54 9
9 應(yīng)急電源EPS的工作原理應(yīng)急電源EPS的工作原理摘要:應(yīng)急電源EPS的工作原理,以及如何使用戶能夠理性的去選擇產(chǎn)品。文中詳細(xì)分析了EPS的構(gòu)造和工作原理以及帶負(fù)載時(shí)的工作特性
2009-07-05 22:50:18105 在電梯群控制調(diào)度算法中,如何有效利用電梯群控制系統(tǒng)中的大量復(fù)雜、冗余或不完備的原始數(shù)據(jù)以及群控制策略如何適應(yīng)多變的電梯交通狀況是提高電梯群控性能的關(guān)鍵問(wèn)題。
2009-08-05 10:40:0912 一種基于本體的PageRank算法的改進(jìn)策略:介紹Google 等搜索引擎應(yīng)用的PageRank 算法的定義、特點(diǎn)及缺陷。針對(duì)PageRank 算法在基于Ontology 的海洋文檔檢索系統(tǒng)應(yīng)用中的問(wèn)題對(duì)其加以改
2009-10-17 23:01:5615 相同厚度的EPS以及XPS保溫性能是逐漸升高的。EPS為0.041,XPS是0.030。因此達(dá)到相同的保溫效果的情況下,XPS板材比EPS板材厚度要薄,但純板材的價(jià)格XPS板貴于EPS板。如果全面考慮工藝
2009-12-15 14:06:2615 隨著互聯(lián)網(wǎng)規(guī)模的增長(zhǎng),擁塞已經(jīng)成為一個(gè)重要的研究熱點(diǎn)。介紹了TCP 擁塞控制的四種基本算法。TCP 擁塞算法對(duì)這些基本算法進(jìn)行組合,分析其不同的特點(diǎn),并且通過(guò)建模對(duì)算法組
2009-12-25 15:14:2920
三電平逆變器SVPWM控制策略及實(shí)驗(yàn)研究
摘要:在兩電平的常規(guī)空間矢量PWM算法的基礎(chǔ)上,給出了三電平空間矢量PWM算法
2009-07-15 09:09:286489 
十年來(lái),車(chē)載網(wǎng)絡(luò)架構(gòu)已變得更為復(fù)雜。雖然車(chē)載網(wǎng)絡(luò)協(xié)議的數(shù)量有所減少,但實(shí)際在用的網(wǎng)絡(luò)數(shù)量卻大大增加了。這就提出了網(wǎng)絡(luò)架構(gòu)的可縮放性問(wèn)題,并且要求為滿足各
2010-08-25 10:11:34584 EPS應(yīng)急電源的特點(diǎn)
EPS應(yīng)急電源為應(yīng)用逆變技術(shù),采取CPU控制、數(shù)字化電路、高集成度電子元件生產(chǎn)
2010-11-09 11:07:522040 這些都是我感興趣的東西,這邊是關(guān)于:控制算法的 ;希望大家有興趣的,有選擇性的下載!好好加油
2015-12-01 16:16:1124 本課題是基于 PID 控制算法來(lái)進(jìn)行控制的。在未做這個(gè)
課題之前,對(duì)于 PID 控制算法是一知半解,只是知道是一種
反饋控制的策略,感覺(jué)很神秘。
2016-03-09 10:57:231 攝像頭黑線識(shí)別算法和賽車(chē)行駛控制策略
2016-11-11 18:42:288 遺傳算法在I_O調(diào)度策略中的應(yīng)用與研究_呂燕彬
2017-01-03 15:24:450 基于混沌擾動(dòng)策略的果蠅優(yōu)化算法_李宗岳
2017-01-07 18:56:130 基于貪心算法的云計(jì)算資源調(diào)度策略_崔雪嬌
2017-01-07 19:00:391 兩電平變流器SVPWM策略新型等效算法_李寧
2017-01-08 10:47:211 的控制。研制的硬件控制器通過(guò)了有關(guān)的電氣性能測(cè)試,并采用模糊PD控制策略對(duì) EPs原地轉(zhuǎn)向的助力特性進(jìn)行了仿真分析。
2017-09-08 15:41:2619 汽車(chē)電子助力轉(zhuǎn)向系統(tǒng)(EPS)可以降低能耗,提高駕控智能水平,且更容易與其它高級(jí)安全系統(tǒng)集成,因而近年來(lái)在汽車(chē)中得到了大力的推廣和發(fā)展。在這個(gè)領(lǐng)域,國(guó)內(nèi)EPS供應(yīng)商與國(guó)外供應(yīng)商的主要差距體現(xiàn)在EPS控制技術(shù)和系統(tǒng)安全設(shè)計(jì)兩方面。
2017-09-15 14:13:2422 本文有A段架構(gòu)師的從產(chǎn)品策略到四項(xiàng)假設(shè)及跨預(yù)定、芯片、安卓平臺(tái)、自己平臺(tái)的策略,非常值得學(xué)習(xí)。
2017-09-15 17:03:406 本文有A段架構(gòu)師的從產(chǎn)品策略到四項(xiàng)假設(shè)及跨預(yù)定、芯片、安卓平臺(tái)、自己平臺(tái)的策略,非常值得學(xué)習(xí)。
2017-09-15 17:13:477 本文提出了一種基于SVPWM的過(guò)調(diào)制控制算法和基于電氣損耗最小的效率優(yōu)化控制策略能有效擴(kuò)大電機(jī)轉(zhuǎn)速運(yùn)行范圍,提高運(yùn)行效率。
2017-09-20 12:45:308 ,一些部分維進(jìn)化的個(gè)體可能被放棄,從而影響算法的收斂速度以及求精能力。提出的布谷鳥(niǎo)搜索增強(qiáng)算法采用逐維評(píng)價(jià)策略接收一些部分進(jìn)化的個(gè)體,可進(jìn)一步增強(qiáng)算法的收斂速度和求精能力。在算法中,逐維評(píng)價(jià)策略作為局部搜索技術(shù)鑲嵌在兩個(gè)隨機(jī)走動(dòng)部
2017-11-23 15:13:070 隨機(jī)吸引策略螢火蟲(chóng)算法是一種元啟發(fā)式優(yōu)化算法。它優(yōu)化了標(biāo)準(zhǔn)螢火蟲(chóng)算法,不僅降低了其時(shí)間復(fù)雜度,而且提高了其優(yōu)化能力。高維全局優(yōu)化問(wèn)題的求解是一個(gè)非常耗時(shí)的過(guò)程,為了減少優(yōu)化高維問(wèn)題所需時(shí)間,進(jìn)一步
2017-11-24 15:13:100 ,消除了預(yù)測(cè)帶寬存在的毛刺現(xiàn)象;其次,針對(duì)原SF算法存在沒(méi)有考慮緩存區(qū)狀態(tài)所帶來(lái)的頻繁播放停滯問(wèn)題以及傳統(tǒng)緩存區(qū)控制算法存在分級(jí)困難的問(wèn)題,引入一種基于緩存區(qū)容量的新型緩存區(qū)控制策略;最后,將改進(jìn)SF算法與新型緩存
2017-11-24 16:54:370 針對(duì)諧波平衡分析中傳統(tǒng)算法存在初值限制,以及智能算法收斂速度慢的缺點(diǎn),提出一種基于BFGS( Broyden-Fleteher-Goldfarl-Shanno)算法局部搜索策略的自適應(yīng)蜂群算法。該算法
2017-12-03 09:24:360 網(wǎng)絡(luò)資源,處理效率偏低。近期,人們提出軟件定義網(wǎng)絡(luò)(SDN)架構(gòu),該架構(gòu)采用集中控制器和多層網(wǎng)絡(luò)技術(shù),能夠較好地獲取網(wǎng)絡(luò)的全局信息。在原有工作的基礎(chǔ)上提出了一種基于SDN架構(gòu)的全局擁塞避免策略OSCP,該策略在擁塞信息獲取
2017-12-06 09:42:100 針對(duì)標(biāo)準(zhǔn)粒子群優(yōu)化(PSO)算法在復(fù)雜問(wèn)題上收斂速度慢和早熟收斂的缺點(diǎn),提出了一種多策略并行學(xué)習(xí)的異構(gòu)PSO算法(MHPSO)。該算法首先從種群多樣性和跳出局部極值的角度提出了兩種新學(xué)習(xí)策略(局部
2017-12-29 13:55:410 針對(duì)狼群算法( WPA)存在的收斂速度慢、易陷入局部最優(yōu)、人工狼交互性不理想等不足,提出一種基于改進(jìn)搜索策略的狼群( MWPA)算法。對(duì)游走行為以及召喚行為引入交互策略,促使人工狼之間進(jìn)行信息交流
2018-01-09 14:08:423 骨架差分進(jìn)化算法能夠較好規(guī)避差分進(jìn)化算法控制參數(shù)和變異策略選擇問(wèn)題。針對(duì)基于雙變異策略的經(jīng)典骨架差分算法( MGBDE)沒(méi)有根據(jù)個(gè)體進(jìn)化差異選擇適合的變異策略和考慮早熟收斂的問(wèn)題,提出一種改進(jìn)算法
2018-01-16 16:08:280 wind power system,DPMSWPS)的復(fù)雜非線性系統(tǒng)產(chǎn)生重要影響。鑒于PI控制存在參數(shù)難整定以及魯棒性不佳等問(wèn)題,提出一種應(yīng)用于直驅(qū)式風(fēng)電系統(tǒng)控制中的基于狀態(tài)反饋的模糊控制策略。該控制
2018-01-27 10:00:453 針對(duì)傳統(tǒng)下垂控制作用下微網(wǎng)的運(yùn)行狀態(tài)平滑切換問(wèn)題,利用滑模控制算法設(shè)計(jì)新的魯棒下垂控制策略,通過(guò)增加滑模補(bǔ)償控制環(huán)節(jié)來(lái)提高傳統(tǒng)下垂控制的魯棒性。首先采用相角一電壓設(shè)計(jì)下垂控制,然后根據(jù)下垂控制結(jié)構(gòu)
2018-01-30 13:56:475 間歇式能源接入、全國(guó)電網(wǎng)互聯(lián)、在線運(yùn)行保護(hù)與控制需求等多重因素對(duì)電網(wǎng)緊急控制策略搜索提出了新的要求。為此提出了一種基于貪心算法的緊急控制策略優(yōu)化搜索方法。該方法選擇預(yù)想故障集中某一失穩(wěn)算例進(jìn)行
2018-03-06 11:31:370 多端柔性直流輸電(VSC-MTDC)基于柔性直流技術(shù)及多站協(xié)調(diào)控制策略。首先,設(shè)計(jì)了適于VSC-MTDC的P-Udc/Uac-Q下垂策略及控制系統(tǒng)架構(gòu)。其次,提出基于LCL高階一次系統(tǒng)模型的電流內(nèi)環(huán)
2018-03-12 16:27:310 驅(qū)動(dòng)電路、信號(hào)采集電路和最小系統(tǒng)電路;在助力電機(jī)的控制策略方面,結(jié)合EPS系統(tǒng)的助力控制目標(biāo),采用增量式PID算法控制電機(jī)扭矩;在程序設(shè)計(jì)方面,采用模塊化的編寫(xiě)方式調(diào)試了EPS控制器的主程序以及各個(gè)模塊的子程序,并添加了CAN通信模塊以實(shí)現(xiàn)EPS控
2018-03-26 16:06:0412 本文檔的主要內(nèi)容詳細(xì)介紹的是飛思卡爾汽車(chē)轉(zhuǎn)向電動(dòng)助力控制EPS電路原理圖免費(fèi)下載。
2019-04-01 08:00:0060 PID控制是最早發(fā)展起來(lái)的控制策略之一,由于其算法簡(jiǎn)單,魯棒性好和可靠性高,被廣泛用于工業(yè)控制當(dāng)中。常規(guī)PID控制系統(tǒng)原理框圖如下,該系統(tǒng)由模擬PID控制器以及被控對(duì)象組成。
2019-07-03 14:25:439163 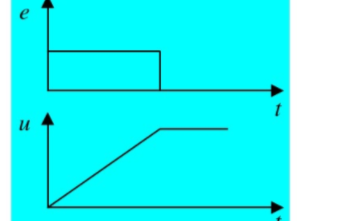
本文首先介紹了eps電源的概念,其次介紹了eps電源的組成,最后分析了eps電源工作原理。
2019-11-14 11:05:3928014 針對(duì)移動(dòng)邊緣計(jì)算(MEC)車(chē)聯(lián)網(wǎng)計(jì)算卸載系統(tǒng),考慮并發(fā)多個(gè)多優(yōu)先級(jí)計(jì)算任務(wù)以及MEC服務(wù)器資源負(fù)載不均的情況,提出基于遺傳算法的卸載策略GAOS。根據(jù)車(chē)輛速度、MEC覆蓋情況以及計(jì)算任務(wù)特性
2021-03-17 09:21:4110 神經(jīng)網(wǎng)絡(luò)的發(fā)展歷程,分類(lèi)介紹以進(jìn)化算法為搜索策略實(shí)現(xiàn)神經(jīng)架構(gòu)搜索的方法和過(guò)程,并比較基于進(jìn)化算法的不同神經(jīng)架構(gòu)搜索算法的特點(diǎn)和現(xiàn)狀,在此基礎(chǔ)上,對(duì)神經(jīng)架枃搜索算法的搜索空間、搜索策略以及算法的未來(lái)發(fā)展方向進(jìn)
2021-03-22 14:37:0615 針對(duì)傳統(tǒng)下垂控制及線路阻抗不匹配等因素引起的孤島微電網(wǎng)電壓偏差及無(wú)功功率難以均分的問(wèn)題,提出基于自觸發(fā)一致性算法的分布式分層控制策略。在微電網(wǎng)二次控制層采用一致性算法構(gòu)造電壓、無(wú)功功率全局平均值估計(jì)
2021-03-24 15:35:479 基于單分類(lèi)的演化算法預(yù)選擇策略OCPS
2021-06-07 16:07:582 基于蟻群算法優(yōu)化的虛擬機(jī)放置策略綜述
2021-06-19 15:27:5217 一種基于自適應(yīng)鄰域策略的改進(jìn)算法
2021-06-27 15:27:4110 EPS是汽車(chē)車(chē)輛使用的電子助力轉(zhuǎn)向系統(tǒng),主要作用是產(chǎn)生助力,輔助汽車(chē)進(jìn)行轉(zhuǎn)向工作。EPS控制器安裝在汽車(chē)儀表盤(pán)下方,通電后長(zhǎng)期工作狀態(tài),為了保證控制器的性能,要求控制器中的電子元器件和安裝結(jié)構(gòu)的溫度保持穩(wěn)定性。
2021-07-07 13:38:171169 今天就和大家聊聊大公司的面試環(huán)節(jié)經(jīng)常涉及的算法題類(lèi)型以及準(zhǔn)備策略。 問(wèn)題難度首先大家比較關(guān)心的就是面試時(shí)候出現(xiàn)的算法題的難度,從我的個(gè)人經(jīng)驗(yàn)來(lái)看,除了有一次和同樣有acm獲獎(jiǎng)經(jīng)歷的面試官切磋了一次
2021-09-02 10:50:021293 市電正常時(shí)無(wú)輸出,或需通過(guò)消防聯(lián)動(dòng)控制輸出,一般EPS電源能夠在主機(jī)里面添加多路輸出配電和設(shè)備控制電路。當(dāng)市電康復(fù)正常,EPS電源康復(fù)的市電供電狀況。溫濕度遠(yuǎn)程監(jiān)控EPS電源的作業(yè)原理與后備式UP...
2021-11-08 15:36:0116 株式會(huì)社電裝(以下簡(jiǎn)稱“電裝”)利用多年來(lái)積累的車(chē)載技術(shù)開(kāi)發(fā)培育的EPS-MCU(電動(dòng)助力轉(zhuǎn)向系統(tǒng)控制單元)技術(shù),提升“機(jī)器人底盤(pán)”的規(guī)格。
2022-07-19 11:59:311074 3.永磁同步電機(jī)的矢量控制策略(三)這里寫(xiě)目錄標(biāo)題 3.永磁同步電機(jī)的矢量控制策略(三) PWM控制算法 3.1PWM控制的基本原理 3.2PWM控制的實(shí)現(xiàn)過(guò)程 3.3PWM控制的規(guī)則采樣 總結(jié)
2023-03-14 09:33:114 自動(dòng)駕駛技術(shù)是一個(gè)龐大的工程體系,軟件架構(gòu)、功能算法、控制規(guī)劃、感知識(shí)別、建圖定位、電氣架構(gòu)、車(chē)載控制器、驗(yàn)證
體系等等,有太多的角度可以去切入。對(duì)于自動(dòng)駕駛功能與算法開(kāi)發(fā),自動(dòng)駕駛功能的分級(jí)
2023-06-01 14:41:291 概述經(jīng)緯恒潤(rùn)自2006年成立EPS團(tuán)隊(duì)以來(lái),采用國(guó)際標(biāo)準(zhǔn)和先進(jìn)技術(shù),開(kāi)發(fā)了針對(duì)低成本應(yīng)用的匹配有刷電機(jī)的EPS和針對(duì)高端應(yīng)用的匹配無(wú)刷電機(jī)的EPS,產(chǎn)品類(lèi)型包括分體式和PowerPack兩種
2022-04-13 11:24:00593 
AutoSAR是一種開(kāi)放的、標(biāo)準(zhǔn)化的汽車(chē)電子軟件架構(gòu),旨在提高汽車(chē)電子系統(tǒng)的研發(fā)效率和質(zhì)量。車(chē)載以太網(wǎng)作為一種高速、可靠的通信技術(shù),已經(jīng)成為現(xiàn)代汽車(chē)電子系統(tǒng)的關(guān)鍵技術(shù)之一。在AutoSAR中,車(chē)載
2024-01-19 18:00:43495 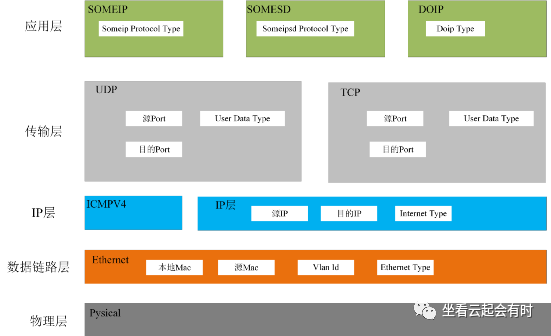
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論