 電子發燒友App
電子發燒友App


目前,直接切入全固態LiDAR或者正朝著全固態LiDAR轉型的國內外企業數量已逐步超越機械式LiDAR和混合固態LiDAR領域。
1. Quanergy(美國)
在全固態LiDAR領域最吸睛的公司則是Quanergy。Quanergy成立于2012年,總部位于硅谷中心的加州桑尼維爾,其領先的固態LiDAR傳感器和軟件可實時捕獲和處理高清3D地圖數據和進行對象偵測、跟蹤和分類,應用領域包括運輸、安防、地圖和工業自動化等。Quanergy的LiDAR傳感器在六大關鍵商業化指標(成本、性能、可靠性、尺寸、重量和功率效率)上均處于領先地位,同時滿足利用固態技術進行大規模部署所要求的耐久性和可靠性。
Quanergy采用光學相控陣技術,于2017年推出的S3是全球首款、也是唯一一款汽車級固態LiDAR系統,在成本、性能和可靠性方面均處于行業領先地位。
2. LeddarTech(加拿大)
LeddarTech成立于2007年,總部位于加拿大,專注于為自動駕駛汽車和駕駛輔助系統開發自己的LiDAR技術。其將在CES 2018(2018年1月9~12日在美國拉斯維加斯舉辦的國際消費電子展)重磅展出LeddarCore LCA2芯片——業界首款能夠實現車用LiDAR大規模量產的3D固態LiDAR芯片,包括LCA2 芯片工程樣品,以及基于LCA2的3D泛光(Flash)LiDAR模組。同時展出的還包括目前仍處于開發階段的LiDAR系統分立方案LeddarCore LCA3,首款樣品計劃將于2018年推出。
3. Oryx Vision(以色列)
以色列初創公司Oryx Vision創立于2009年,目前,已經通過一輪融資募集了1700萬美元,以為自動駕駛汽車開發固態深度視覺解決方案。該公司近期發布了一款新型LiDAR傳感器,利用了長波紅外激光器來追蹤路面上的物體。Oryx的相干光LiDAR系統使用一種被稱為“納米天線”的技術,不像激光雷達那樣通過光電傳感器來偵測光線粒子,而是根據光的“波粒二象性”以波的形式使用納米天線來感知反射回來的信號(光)。這款新型LiDAR傳感器納米天線可以接收波長為10微米的電磁波,這種波長能有效穿透煙霧,而且不會像激光雷達那樣受強光影響。
4. XenomatiX(比利時)
XenomatiX成立于2013年,總部位于比利時魯汶。其LiDAR沒有任何運動部件,尺寸小、功耗低,基于成熟的半導體元器件,創新的投影模式保證了出色的耐久性。通過數千束激光的同時照明,分辨率達到每秒百萬次的測量,從而能識別汽車周圍的任一細節事物。使用平行的低功率激光束,利用電荷積分飛行時間(ToF)法來測量距離,工作范圍達200米。
5. Continental(德國)
德國大陸集團(Continental)創始于1871年,是具有百年歷史的跨國性企業集團,世界領先的汽車配套產品供應商之一。大陸集團依靠強大的研發團隊,設計生產的短距激光雷達SRL1成為一款可靠且高效的固態LiDAR,無需任何機械運動部件即可實現正面碰撞檢測等應用。SRL1提供基于紅外激光技術的緊急制動輔助功能,且已經在微型車上使用。Continental于去年買下美國的3D泛光(Flash)激光雷達公司Advanced Scientific Concepts,在今年的法蘭克福車展上,大陸這一采用Flash技術方案的固態激光雷達也出現在展示區,設計探測距離達到200米。
6. TetraVue(美國)
TetraVue成立于2008年,總部位于美國加州。其獨創的“光切片(Light Slicer)”專利技術,集成了固態激光雷達發射單元,深度感知攝像頭,以及標準的CMOS和CCD像素技術等一系列傳感器和算法,能夠通過時間維度和距離維度的量測,利用標準的CMOS傳感器測算光學強度信息。

7. Blackmore(美國)
Blackmore總部位于美國蒙大拿洲博茲曼,是研發緊湊型調頻連續波(FMCW)LiDAR的領導者,并提供配套的分析工具軟件。產品可應用在關鍵任務、汽車、軍事和工業環境,這些應用場景中,傳統的光電/紅外傳感器和直接探測3D成像則受到成本和性能規格限制。

8. Strobe / GE(美國)
Strobe是從OEwaves獨立出來的一家專注于自動駕駛汽車LiDAR開發的創業公司。OEwaves由Strobe公司主要創始人之一創辦于2000年8月,核心技術包括光電振蕩器(OEO)和“回音壁模式(whispering gallery mode)”光學諧振腔。Strobe于2017年10月被通用(GE)收購。收購時Strobe僅有12名員工,該公司專注于為自動駕駛汽車開發100美元以下的全固態LiDAR。Strobe模仿線性調頻雷達開發了一種線性頻率調制(FM)激光,其線性脈沖的頻率能夠線性變化。探測器通過測量反射的線性調頻脈沖激光的相位和頻率,不僅能夠獲得物體的距離信息,還能測量其相對運動速度。

9. 光珀智能(中國)
光珀智能(Genius Pros)位于中國杭州,該公司推出了“光珀第一代ToF傳感器芯片”,基于這樣的芯片,構建了三個固態面陣式激光雷達技術平臺,分別滿足不同距離下(近、中、遠),強陽光下(100Klux),大場景(70?),高精度(《1%),高空間分辨率(0.06?V)等三維感知需求。這三個技術平臺可以服務于智能安防、機器人的導航與避障、無人駕駛的環境感知。特別是在無人駕駛領域,光珀的傳感器滿足了量產無人車對激光雷達低成本、高空間分辨率的兩大需要。

10. 北醒光子(中國)
北醒光子(Benewake)于2015年成立于北京,專注于固態激光雷達的研發和制造。北醒研發的CE30,是一款具有大視場角的全固態激光雷達。它可同時輸出132°水平視場、9°垂直視場范圍內的灰度與深度信息,且內部無任何機械旋轉部件,以保證更高的可靠性與穩定性。
此外,德國激光雷達供應商Ibeo,國內鐳神智能、速騰聚創等企業均已在全固態LiDAR領域布局。顯然,搶占全固態LiDAR的先機,就搶食到未來自動駕駛的“香餑餑”,全固態LiDAR已成為兵家必爭之地。
全固態LiDAR的派別之爭
激光雷達測距方法分為飛行時間法和三角法兩大類。目前,汽車全固態激光雷達大多采用飛行時間法。
激光雷達測距方法
按照全固態LiDAR發射端照明方式可以分為激光多束發射、可操縱或相控陣列、泛光面陣發射三種模式。
按照全固態LiDAR探測端的接收技術,可以分為相干接收技術和直接接收技術。直接接收技術是接收光子能量的直接形式,優點是技術簡單和成熟。相干接收技術的接收靈敏度,速度分辨率高,但需要接收機的頻帶特別寬,對激光發射的頻率穩定度的要求也高,對光學天線系統和機內光路的校準的要求更嚴格,信息處理單元更復雜。
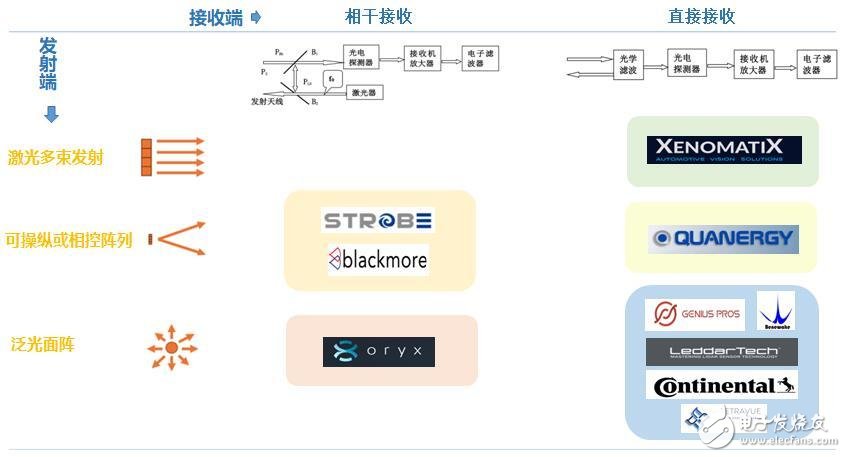
全固態LiDAR按照發射端的光波特性和接收端的探測技術進行分類及代表企業
光學相控陣LiDAR
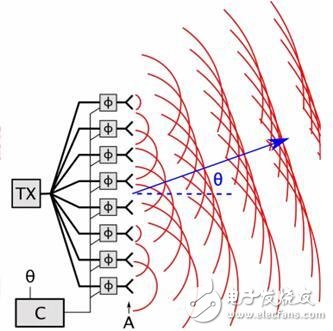
在光學相控陣(OPA,Optical Phased Array)LiDAR中,相控陣發射器由若干發射接收單元組成陣列,通過改變加載在不同單元的電壓,進而改變不同單元發射光波特性(如光強、相位),實現對每個單元光波的獨立控制,通過調節從每個相控單元輻射出的光波之間的相位關系,在設定方向上產生互相加強的干涉從而實現高強度光束,而其它方向上從各個單元射出的光波彼此相消,因此,輻射強度接近于零。組成相控陣的各相控單元在程序的控制下,可使一束或多束高強度光束的指向按設計的程序實現隨機空域掃描(對此原理不理解的“筒子”,可以復習下光柵衍射的物理現象)。
Quanergy光學相控陣LiDAR S3工作原理示意圖
光學相控陣LiDAR具有掃描速度快(一般都可以達到MHz量級以上)、掃描精度或指向精度高(千分之一度量級以上)、可控性好(除對目標區域進行高密度的掃描外,在其它區域也能進行稀疏掃描)等優點。
但光學相控陣的制造工藝難度較大,這是因為要求陣列單元尺寸必須不大于半個波長,一般目前激光雷達的工作波長均在1微米左右,這就意味著陣列單元的尺寸必須不大于500納米。而且陣列數越多,陣列單元的尺寸越小,能量越往主瓣集中,這就對加工精度要求更高。此外,材料的研究和選擇也是非常關鍵的因素,到目前為止,鈮酸鋰晶體、PLZT壓電陶瓷、液晶和AlGaAs基波導光學相控已得到開發。未來,器件方面,進一步減小相控陣單元尺寸,提高衍射效率,減小器件尺寸;更為根本的材料研究方面,開發工作在中波紅外、長波紅外、紫外波段的液晶材料,以及繼續尋求具有大雙折射、響應速度快、熱穩定性高、耐強激光的高性能電光材料,同時發展對中長波和紫外波段具有較好透過率的電光材料,以擴展光學相控陣器件的應用領域。
調頻連續波LiDAR
調頻連續波(FMCW)LiDAR采用線性調頻信號,信號發生器產生線性調頻鋸齒脈沖射頻信號對連續波半導體激光器輸出的激光進行線性調頻強度調制。調制后激光經過準直和擴束后發射出去。激光探測到目標后,一部分激光反射到光電探測器上,轉化為電信號,從而提取中頻信號獲得目標的距離信息。
調頻連續波LiDAR測距原理
調頻連續波LiDAR概念并不新穎,但是面對的技術挑戰不少,例如發射激光的線寬限制、線性調頻脈沖的頻率范圍、線性脈沖頻率變化的線性度,以及單個線性調頻脈沖的可復制性等。Strobe采用光電振蕩器(OEO)和“回音壁模式(Whispering Gallery Mode)”光學諧振腔來解決以上問題,其激光光源可以提供具有15 GHz或以上帶寬的線性調頻脈沖激光,使LiDAR系統的距離分辨能力可以下探至厘米級以下。
Strobe董事會成員Brower曾在2015年發布的論文談到他的LiDAR發射端設計與OPA類似,或用于Strobe的調頻連續波LiDAR
納米天線陣列LiDAR
Oryx Vision憑借納米天線陣列LiDAR,找到了困擾自動駕駛汽車商業化的主要問題:如何平衡探測距離、精度和成本三者的關系。Oryx Vision深度傳感器可以檢測到150米遠的微小物體,它既可以在暗夜里工作,也不會受直射的陽光影響,而即使在雨霧等極端天氣條件下也可以穩定工作。Oryx Vision傳感器可以無縫集成到車輛的四周,一組這樣的傳感器不但可以提供360°范圍的高性能的景深探測覆蓋,而且價格低廉。
Oryx Vision使用的是長波太赫茲紅外激光的激光器,因為這種紅外光人眼不可見,功率更高。而這種紅外光還很難被水吸收,不會被云霧、強烈的陽光直射所干擾。當發射出的激光反射回傳感器時,光學器件將反射回的入射光引導到大量極小的整流納米天線上。入射光在被整流的天線中產生AC響應,換句話說,被轉換成DC信號。該系統的靈敏度是傳統LiDAR的上百倍。因為天線將入射光處理為波,所以它們還可以檢測到多普勒效應(由于其反彈的相對運動而引起的頻率變化),并且由此還可以確定在道路中或附近的其它物體的速度。
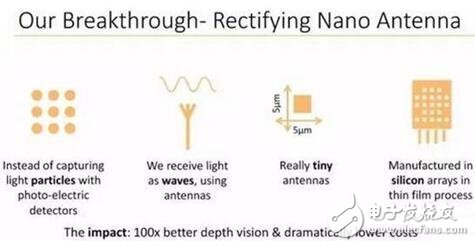
Oryx Vision采用的納米天線只有25平方微米,使用薄膜芯片制造工藝直接在集成電路上制造
每個納米天線只有5 x 5平方微米,使用薄膜芯片制造工藝在硅晶圓上形成陣列,成本相當低廉。而且這將使得信號被饋送到機器學習系統相當簡單,而這個機器學習系統可以對場景中的對象進行分類,從而使得對場景的感知更加智能化。
泛光(Flash)面陣式LiDAR
泛光面陣式是全固態LiDAR中最主流的技術之一。
泛光面陣式LiDAR的激光光源主要有兩種方式:脈沖和連續波,分別對應脈沖飛行時間(pToF,PluseToF)LiDAR和連續波飛行時間(cwToF,Continuous Wave ToF)LiDAR。pToF LiDAR采用脈沖,可以實現遠距離探測(如100米以上);而cwToF LiDAR采用連續波,主要進行近距離探測(如數十米)。泛光面陣式LiDAR屬于非掃描式LiDAR,通過脈沖或連續波捕獲整個場景,而非用激光束逐點掃描。由于探測電子返回脈沖和帶寬較寬的弱點,泛光面陣式LiDAR易受噪聲影響,而閾值觸發可引起測量誤差Δt。
cwToF LiDAR、pToF LiDAR、雷達和超聲波傳感器的參數對比
由激光雷達的理論可知,在功率受限的情況下,要實現遠的探測距離,則要求大的脈沖時寬,而要實現高的探測精度,則需要大的帶寬,簡單脈沖時寬帶寬乘積接近于1,時寬與帶寬相互關聯,不能同時增大時寬與帶寬。pToF LiDAR則通過增益調制式脈沖激光源,可以解決采用連續波激光器發射正弦波在對目標成距離像時限制了激光器的瞬時功率從而嚴重影響成像質量和測量范圍的問題。









 工商網監
工商網監
評論