 電子發燒友App
電子發燒友App


本質上,深度學習是一個新興的時髦名稱,衍生于一個已經存在了相當長一段時間的主題——神經網絡。 ?
從20世紀40年代開始,深度學習發展迅速,直到現在。該領域取得了巨大的成功,深度學習廣泛運用于智能手機、汽車和許多其他設備。
那么,什么是神經網絡,它可以做什么?
現在,一起來關注計算機科學的經典方法:
程序員們準確地設計函數f(x)的所有邏輯:
y = f(x)
其中x和y分別是輸入數據和輸出數據
但是,有時設計 f(x) 可能并不那么容易。例如,假設x是面部圖像,y是通信員的名字。對于大腦來說,這項任務非常容易,而計算機算法卻難以完成!
這就是深度學習和神經網絡大顯神通的地方。
基本原則是:放棄 f() 算法,試著模仿大腦。
那么,大腦是如何表現的?
大腦使用幾個無限對 (x,y) 樣本(訓練集)不斷訓練,在這個過程中,f(x) 函數會自動形成。它不是由任何人設計的,而是從無休止的試錯法提煉機制中形成的。
想想一個孩子每天看著周圍熟悉的人:數十億個快照,取自不同的位置、視角、光線條件,每次識別都要進行關聯,每次都要修正和銳化自然神經網絡。
人工神經網絡是由大腦中的神經元和突觸組成的自然神經網絡模型。
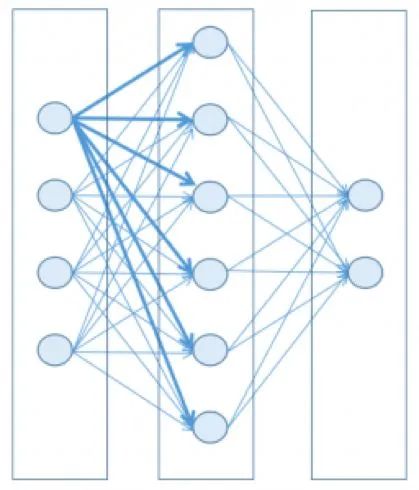
典型的神經網絡結構
為了保持簡單,并且利用當今機器的數學和計算能力,可以將神經網絡設計為一組層,每層包含節點(大腦神經元的人工對應物),其中層中的每個節點連接到下一層中的節點。
每個節點都有一個狀態,通過浮點數表示,其取值范圍通常介于0到1。該狀態接近其最小值時,該節點被認為是非活動的(關閉),而它接近最大值時,該節點被認為是活動的(打開)。可以把它想象成一個燈泡;不嚴格依賴于二進制狀態,但位于取值范圍內的某個中間值。
每個連接都有一個權重,因此前一層中的活動節點或多或少地會影響到下一層中節點的活動(興奮性連結),而非活動節點不會產生任何影響。
連接的權重也可以是負的,這意味著前一層中的節點(或多或少地)對下一層中的節點的不活動性(抑制性連結)產生影響。
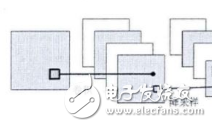
簡單來說,現在假設一個網絡的子集,其中前一層中的三個節點與下一層中的節點相連結。簡而言之,假設前一層中的前兩個節點處于其最大激活值(1),而第三個節點處于其最小值(0)。
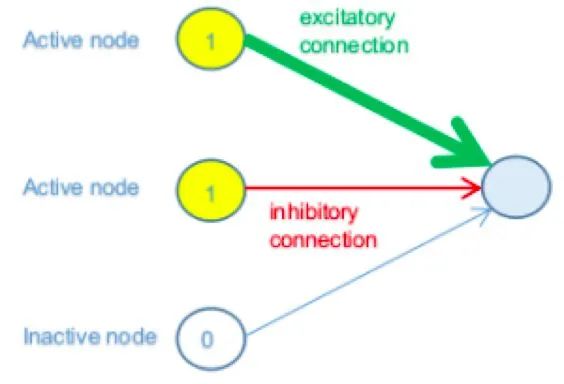
在上圖中,前一層中的前兩個節點是活動的(開),因此,它們對下一層中節點的狀態有所貢獻,而第三個節點是非活動的(關),因此它不會以任何方式產生影響(獨立于其連結權重)。
第一個節點具有強(厚)正(綠色)連接權重,這意味著它對激活的貢獻很大。第二個具有弱(薄)負(紅色)連接權重;因此,它有助于抑制連接節點。
最后,得到了來自前一層的傳入連接節點的所有貢獻值的加權和。
其中i是節點 i 的激活狀態,w ij是連接節點 i 和節點 j 的連接權重。
那么,給定加權和,如何判斷下一層中的節點是否會被激活?規則真的像“總和為正即被激活,結果為負則不會”?有可能,但一般來說,這取決于你為這個節點選擇哪個激活函數及閾值)。
想一想。這個最終數字可以是實數范圍內的任何數字,我們需要使用它來設置更有限范圍內的節點狀態(假設從0到1)。然后將第一個范圍映射到第二個范圍,以便將任意(負數或正數)數字壓縮到0到1的范圍內。
sigmoid 函數是執行此任務的一個常見激活函數。
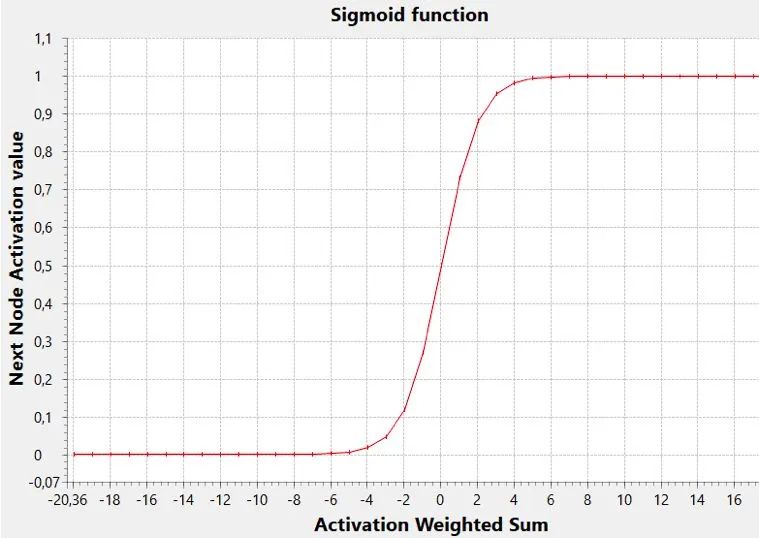
在該圖中,閾值(y 值達到范圍中間的 x 值,即0.5)為零,但一般來講,它可以是任何值(負數或正數,其變化影響sigmoid向左或向右移動)。
低閾值允許使用較低的加權和激活節點,而高閾值將僅使用該和的高值確定激活。
該閾值可以通過考慮前一層中的附加虛節點來實現,其激活值恒定為 1。在這種情況下,該虛節點的連接權重可以用作閾值,并且上文提到的和公式可以被認為包括閾值本身。
最終,網絡的狀態由其所有權重的一組值來表示(從廣義上講,包括閾值)。
給定狀態或一組權重值可能會產生不良結果或大錯誤,而另一個狀態可能會產生良好結果,換句話說,就是小錯誤。
因此,在N維狀態空間中移動會造成小錯誤或大錯誤。損失函數能將權重域映射到錯誤值的函數。在n+1空間里,人們的大腦很難想象這樣的函數。但是,對于N = 2是個特殊情況。
訓練神經網絡包括找到最小的損失函數。為什么是最佳最小值而不是全局最小值?其實是因為這個函數通常是不可微分的,所以只能借助一些 梯度下降技術在權重域中游蕩,并避免以下情況:
做出太大的改變,可能你還沒意識到就錯過最佳最小值
做出太小的改變,你可能會卡在一個不太好的局部最小值
不容易,對吧?這就是深度學習的主要問題,也解釋了為什么訓練階段可能要花數小時、數天甚至數周。
這就是為什么硬件對于此任務至關重要,同時也解釋了為什么經常需要暫停,考慮不同的方法和配置參數來重新開始。
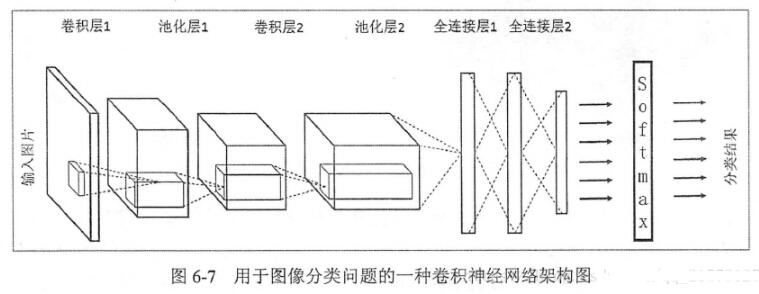
現在回到網絡的一般結構,這是一堆層。第一層是輸入數據 (x),而最后一層是輸出數據 (y)。
中間的層可以是零個、一個或多個。它們被稱為隱藏層,深度學習中的“深度”一詞恰好指的是網絡可以有許多隱藏層,因此可能在訓練期間找到更多關聯輸入和輸出的特征。
提示:在20世紀90年代,你會聽說過多層網絡而不是深度網絡,但這是一回事。現在,越來越清楚的是,篩選層離輸入層越遠(深),就能越好地捕捉抽象特征。
學習過程
在學習過程開始時,權重是隨機設置的,因此第一層中的給定輸入集將傳送并生成隨機(計算)輸出數據。將實際輸出數據與期望輸出數據進行比較;其差異就是網絡誤差(損失函數)的度量。
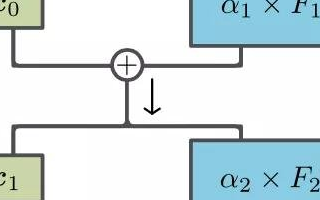
然后,此錯誤用于調整生成它的連接權重,此過程從輸出層開始,逐步向后移動到第一層。
調整的量可以很小,也可以很大,并且通常在稱為學習率的因素中定義。
這種算法稱為反向傳播,并在Rumelhart,Hinton和Williams研究之后,于1986年開始流行。
記住這個名字:杰弗里·辛頓 (Geoffrey Hinton),他被譽為“深度學習的教父”,是一位孜孜不倦的科學家,為他人指引前進方向。例如,他現在正在研究一種名為膠囊神經網絡 (Capsule Neural Networks) 的新范式,聽起來像是該領域的另一場偉大革命!
反向傳播旨在通過對訓練每次集中迭代的權重進行適當的校正,來逐漸減少網絡的整體誤差。另外,減少誤差這個步驟很困難,因為不能保證權重調整總是朝著正確的方向進行最小化。
簡而言之,你戴著眼罩走來走去時,在一個n維曲面上找到一個最小值:你可以找到一個局部最小值,但永遠不知道是否可以找到更小的。
如果學習率太低,則該過程可能過于緩慢,并且網絡也可能停滯在局部極小值。另一方面,較高的學習率可能導致跳過全局最小值并使算法發散。
事實上,訓練階段的問題在于,錯誤只多不少!
現狀
為什么這個領域現在取得如此巨大的成功?
主要是因為以下兩個原因:
訓練所需的大量數據(來自智能手機、設備、物聯網傳感器和互聯網)的可用性
現代計算機的計算能力可以大大縮短訓練階段(訓練階段只有幾周甚至幾天的情況很常見)
想了解更多?這里有幾本好書推薦:
亞當?吉布森(Adam Gibson)和 喬希·帕特森(Josh Patterson)所著的《深度學習》,O’Reilly媒體出版社。
莫希特·賽瓦克(Mohit Sewark)、默罕默德·禮薩·卡里姆(Md Rezaul Karim)和普拉蒂普·普賈里(Pradeep Pujari)所著的《實用卷積神經網絡》, Packt出版社。
審核編輯 :李倩
?














 工商網監
工商網監
評論