 電子發(fā)燒友App
電子發(fā)燒友App


Jetson Inference范例是NVIDIA 提供給Jetson系列的邊緣裝置進(jìn)行視覺影像識別的范例,主要的特色在于這些范例都特別強調(diào)以NVIDIA Jetson系列邊緣裝置內(nèi)的GPU進(jìn)行運算,在實測上也的確發(fā)揮了很好的影像識別效果,尤其在對象偵測(Object Detection)所使用的Detectnet范例更有效率的辨識效能。
RealSense D435則是Intel推出的RealSense系列產(chǎn)品之一,這系列的產(chǎn)品主要是以輸出影像深度信息(測距)的應(yīng)用為主,RealSense D435透過光學(xué)測距的方式進(jìn)行深度信息的探測,在應(yīng)用上有著不錯的探測效果。
影像對象偵測一直都是影像深度學(xué)習(xí)的重要應(yīng)用之一,透過神經(jīng)網(wǎng)絡(luò)對于對象(Object)的種類進(jìn)行辨識進(jìn)而確認(rèn)對象在影像中的直角坐標(biāo)位置,在辨識上僅能確認(rèn)對象的影像方位,這樣的影像對象偵測由于缺少了對象與攝影機的相對距離,因此在更進(jìn)一步的應(yīng)用上便會受到一些局限,例如:透過影像信息控制機械手臂,自動夾取指定的物品、自駕車或無人飛行器精確的回避障礙物或跟蹤控制。
因此本文將著重在對象與攝影機的相對距離應(yīng)用在影像對象偵測的實作教學(xué)上,希望能夠透過這樣的實作教學(xué)讓每個使用者可以進(jìn)一步的針對影像對象偵測進(jìn)行測量距離,這次采用的微電腦平臺是NVIDIA Jetson Nano 4GB嵌入式系統(tǒng),與Intel的影像深度攝影機Realsense D435兩者進(jìn)行整合,本文針對NVIDIA的GStreamer技術(shù)進(jìn)行簡介,主要是因為NVIDIA的Jetson Inference相關(guān)應(yīng)用,都是透過GStreamer進(jìn)行影像數(shù)據(jù)的交換傳輸,透過GStreamer可以有效提升圖像處理的效能。
一、Jetson Inference應(yīng)用程序操作環(huán)境的安裝與設(shè)定
Jetson Inference程序操作環(huán)境的設(shè)定主要是會完成三個環(huán)境更新安裝與設(shè)定,分別是:
1.Python程序的相依套件程序安裝(如:Pytroch等)
2.Python程序的編譯與路徑參數(shù)設(shè)定
3.影像識別相關(guān)預(yù)訓(xùn)練神經(jīng)模型的安裝
/有關(guān)Jetson Inference程序的安裝與設(shè)定,請參考之前的文章。--小編/
本文所采用的主要的是detectnet這個范例應(yīng)用為主,因此若使用者對于安裝空間有所斟酌的話,請優(yōu)先完成這部分的安裝,請注意,本文建議盡可能將detectnet所需要用到的預(yù)訓(xùn)練神經(jīng)網(wǎng)絡(luò)模型全部安裝,這樣可以避免未來在應(yīng)用時產(chǎn)生補充安裝模型的問題。此外這里的安裝會需要從網(wǎng)絡(luò)下載大量程序與檔案,因此請務(wù)必確認(rèn)網(wǎng)絡(luò)傳輸環(huán)境在長時間運作下,能夠正常傳輸。
Jetson Inference的范例程序運作,主要是透過CUDA連結(jié)GPU的方式進(jìn)行Tensor-RT的運算,也由于是透過GPU進(jìn)行運算,在操作影像識別的神經(jīng)網(wǎng)絡(luò)運算時有著較佳的運作效能。透過GStreamer進(jìn)行影像串流的處理,可以有效提升影像傳輸?shù)男埽贘etson Inference的神經(jīng)網(wǎng)絡(luò)運算時,也都是以GStreamer的方式進(jìn)行影像數(shù)據(jù)的傳遞。
透過上述這兩方面的技術(shù)的整合,對于影像對象偵測是有非常重要的貢獻(xiàn),根據(jù)實測在進(jìn)行detectnet程序運作的時候,整體約莫會有25FPS的操作效能,這歸功于CUDA有效連結(jié)了GPU進(jìn)行運算產(chǎn)生的效益。
二、intel Realsense D435深度影像應(yīng)用程序操作環(huán)境的安裝與設(shè)定
Realsense相關(guān)應(yīng)用程序操作環(huán)境的安裝與設(shè)定主要是針對以下三個事項進(jìn)行設(shè)定,分別是:
1.Python相依套件的安裝
2.Realsense應(yīng)用程序的編譯與路徑設(shè)定
3.Realsense-viewer或Python程序的安裝
/有關(guān)Realsense程序的安裝與設(shè)定,請參考之前的文章進(jìn)行安裝即可。--小編/
Realsense的影像信息其格式必須經(jīng)過numpy套件程序的轉(zhuǎn)換處理才能呈現(xiàn)實時影像,這部分的介紹將會在后續(xù)的介紹當(dāng)中,透過片段程序的進(jìn)行重點說明,Realsense在運作的時候基本上會有兩種不同內(nèi)容的影像輸出,一個是標(biāo)準(zhǔn)RGB的影像輸出,另一個具有深度信息的影像輸出,這兩個影像在應(yīng)用時必須要注意「影像信息對齊」,這主要的原因在于兩種影像在擷取的時候可能會有兩種不同的分辨率的設(shè)定。在實際的硬件規(guī)格當(dāng)中亦可以看出這兩種影像分辨率的極限的確有所不同。

Intel Realsense D435原廠網(wǎng)站資料
https://www.intelrealsense.com/depth-camera-d435/
三、系統(tǒng)架構(gòu)圖
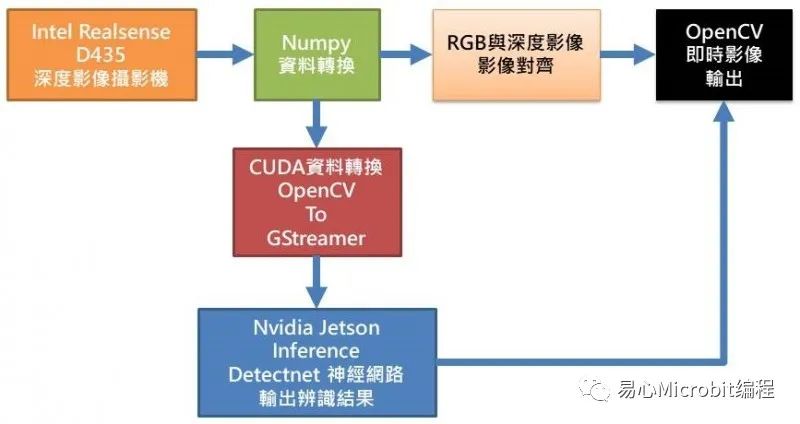
從上圖可知,Realsense D435要透過Numpy套件程序才能將影像信息轉(zhuǎn)換成OpenCV格式進(jìn)行后續(xù)的圖像處理,如:繪邊界框、標(biāo)注文字與實時影像顯示等,而要進(jìn)行Jetson Inference的detectnet運算之前,亦必須先透過CUDA轉(zhuǎn)換數(shù)據(jù)將OpenCV格式轉(zhuǎn)換成GStreamer格式才能進(jìn)行detectnet神經(jīng)網(wǎng)絡(luò)運算,之后再將detectnet辨識后的結(jié)果,如:邊界框位置信息、對象種類名稱,加入至RGB影像訊息內(nèi)容中,最后與深度影像信息進(jìn)行對齊,如此便可以O(shè)penCV進(jìn)行整合后的影像呈現(xiàn)。
四、程序設(shè)計說明
<匯入相關(guān)套件>
1.JetsonInference 相關(guān)套件
主要有inference、jetson.utils
2.Realsense相關(guān)套件
主要是pyrealsense2
3.OpenCV相關(guān)套件
主要是cv2
4.Numpy數(shù)值運算相關(guān)套件
主要是numpy
#!/usr/bin/python3
#
#Copyright (c) 2021, Cavedu. All rights reserved.
#
importjetson.inference
importjetson.utils
importargparse
importsys
importos
importcv2
importre
importnumpy as np
importio
importtime
importjson
importrandom
importpyrealsense2 as rs1234567891011121314151617181920212223242526
<程序外部參數(shù)設(shè)定>
1.–network指定預(yù)訓(xùn)練神經(jīng)網(wǎng)絡(luò)模型
2.–threshold設(shè)定影像辨識閥值(多少以上才進(jìn)行顯示)
3.–width 設(shè)定影像寬度
4.–height設(shè)定影像高度
# parsethe command line
parser =argparse.ArgumentParser(description="Locate objects in a live camerastream using an object detection DNN.",
formatter_class=argparse.RawTextHelpFormatter,epilog=jetson.inference.detectNet.Usage() +
jetson.utils.logUsage())
parser.add_argument("--network",type=str, default="ssd-mobilenet-v2",
help="pre-trained modelto load (see below for options)")
parser.add_argument("--threshold",type=float, default=0.5,
help="minimum detectionthreshold to use")
parser.add_argument("--width",type=int, default=640,
help="set width forimage")
parser.add_argument("--height",type=int, default=480,
help="set height forimage")
opt =parser.parse_known_args()[0]12345678910111213141516171819
設(shè)定jetson.inference的神經(jīng)網(wǎng)絡(luò)運算為detectnet,并且透過opt.network的外部參數(shù)進(jìn)行設(shè)定預(yù)訓(xùn)練神經(jīng)網(wǎng)絡(luò)模型。
# loadthe object detection network
net =jetson.inference.detectNet(opt.network, sys.argv, opt.threshold)123
設(shè)定Realsense套件的起始條件,并且啟動Realsense套件程序。
#Configure depth and color streams
pipeline= rs.pipeline()
config =rs.config()
config.enable_stream(rs.stream.depth,opt.width, opt.height, rs.format.z16, 30)
config.enable_stream(rs.stream.color,opt.width, opt.height, rs.format.bgr8, 30)
# Startstreaming
pipeline.start(config)12345678910
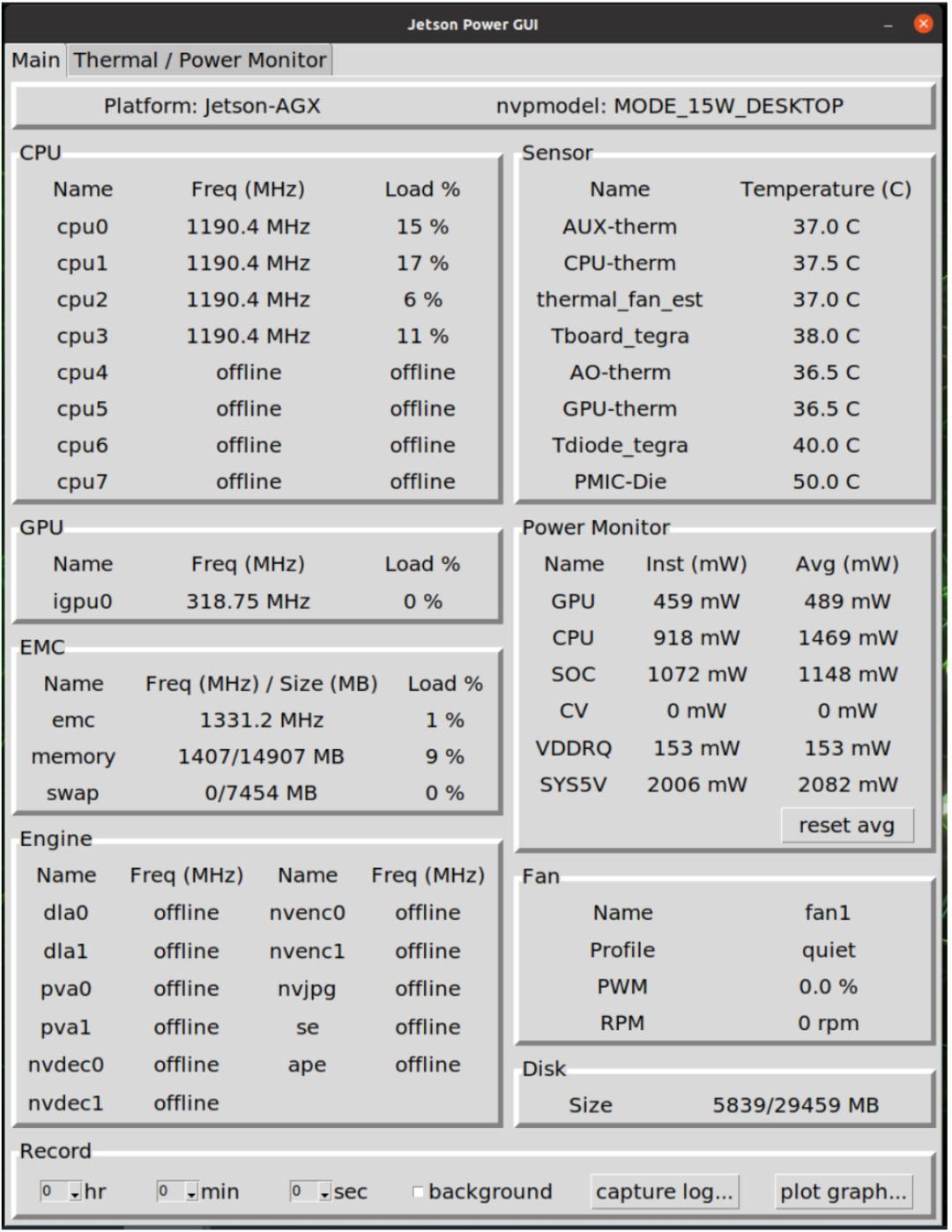
由于啟動本程序會進(jìn)行大量運算,而使微電腦的核心產(chǎn)生高熱,因此透過本行程序啟動散熱風(fēng)扇進(jìn)行降溫。
os.system("sudosh -c 'echo 128 > /sys/devices/pwm-fan/target_pwm'")1
讀取Realsense D435影像內(nèi)容并且透過Numpy將數(shù)據(jù)轉(zhuǎn)成OpenCV格式。
depth_image:深度影像信息
show_img:BGR影像信息
press_key= 0
while(press_key==0):
# Waitfor a coherent pair of frames: depth and color
frames = pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame()
if not depth_frame or not color_frame:
continue
#Convert images to numpy arrays
depth_image =np.asanyarray(depth_frame.get_data())
show_img =np.asanyarray(color_frame.get_data())12345678910111213141516
透過CUDA進(jìn)行OpenCV的BGR影像格式轉(zhuǎn)換,并且將影像格式調(diào)整適用于神經(jīng)網(wǎng)絡(luò)運算的GStreamer格式(img)。
#convert to CUDA (cv2 images are numpy arrays, in BGR format)
bgr_img =jetson.utils.cudaFromNumpy(show_img, isBGR=True)
#convert from BGR -> RGB
img =jetson.utils.cudaAllocMapped(width=bgr_img.width,height=bgr_img.height,format='rgb8')
jetson.utils.cudaConvertColor(bgr_img,img)12345678910
將img影像信息傳入神經(jīng)網(wǎng)絡(luò)進(jìn)行運算,并將結(jié)果存在detections中。
# detectobjects in the image (with overlay)
detections = net.Detect(img)123
取得所有detections中所有已辨識出來的對象種類與位置信息。
box_XXXXX:邊界框坐標(biāo)
score:辨識信心分?jǐn)?shù)
label_name:對象種類名稱
for numin range(len(detections)) :
score =round(detections[num].Confidence,2)
box_top=int(detections[num].Top)
box_left=int(detections[num].Left)
box_bottom=int(detections[num].Bottom)
box_right=int(detections[num].Right)
box_center=detections[num].Center
label_name =net.GetClassDesc(detections[num].ClassID)12345678
透過OpenCV進(jìn)行每個被辨識出來的對象其邊界框繪制、中心準(zhǔn)線繪制與標(biāo)注辨識結(jié)果內(nèi)容文字。
point_distance=0.0
for i inrange (10):
point_distance = point_distance +depth_frame.get_distance(int(box_center[0]),int(box_center[1]))
point_distance= np.round(point_distance / 10, 3)
distance_text= str(point_distance) + 'm'
cv2.rectangle(show_img,(box_left,box_top),(box_right,box_bottom),(255,0,0),2)
cv2.line(show_img,
(int(box_center[0])-10,int(box_center[1])),
(int(box_center[0]+10),int(box_center[1])),
(0, 255, 255), 3)
cv2.line(show_img,
(int(box_center[0]),int(box_center[1]-10)),
(int(box_center[0]),int(box_center[1]+10)),
(0, 255, 255), 3)
cv2.putText(show_img,
label_name + ' ' + distance_text,
(box_left+5,box_top+20),cv2.FONT_HERSHEY_SIMPLEX,0.4,
(0,255,255),1,cv2.LINE_AA)1234567891011121314151617181920212223
透過net.GetNetworkFPS擷取神經(jīng)網(wǎng)絡(luò)辨識的FPS值,并且透過OpenCV在實時影像畫面中標(biāo)注其FPS數(shù)值內(nèi)容。
cv2.putText(show_img,
"{:.0f}FPS".format(net.GetNetworkFPS()),
(int(opt.width*0.8),int(opt.height*0.1)),
cv2.FONT_HERSHEY_SIMPLEX,1,
(0,255,255),2,cv2.LINE_AA)12345
透過OpenCV的resize函數(shù)進(jìn)行顯示畫面的調(diào)整,并且進(jìn)行實時影像的顯示。
display= cv2.resize(show_img,(int(opt.width*1.5),int(opt.height*1.5)))
cv2.imshow('Detecting...',display)
keyValue=cv2.waitKey(1)
ifkeyValue & 0xFF == ord('q'):
press_key=11234567
關(guān)閉實時影像畫面,并且結(jié)束Realsense的串流影像傳送。
# 關(guān)閉所有 OpenCV 窗口
cv2.destroyAllWindows()
pipeline.stop()1234
五、程序執(zhí)行方式
1.可透過MobaXterm以SSH方式聯(lián)機進(jìn)入JetsonNano操作系統(tǒng)操作終端機,或是直接以HDMI屏幕、USB鍵盤鼠標(biāo)直接操作亦可。
2.操作本文測試程序之前,請務(wù)必要先將Jetson Inference (請參考連結(jié))與Realsense(請參考鏈接),兩個相關(guān)程序安裝完成,缺一不可。
3.進(jìn)入終端機指定文件夾中(本文為Realsense_Jetson_Inference)
cd ~
cdRealsense_Jetson_Inference12

4.請確定測試程序存于本文件夾中,并請執(zhí)行以下指令(默認(rèn)為ssd-mobilenet-v2模型):
python3detectnet_realsense.py1

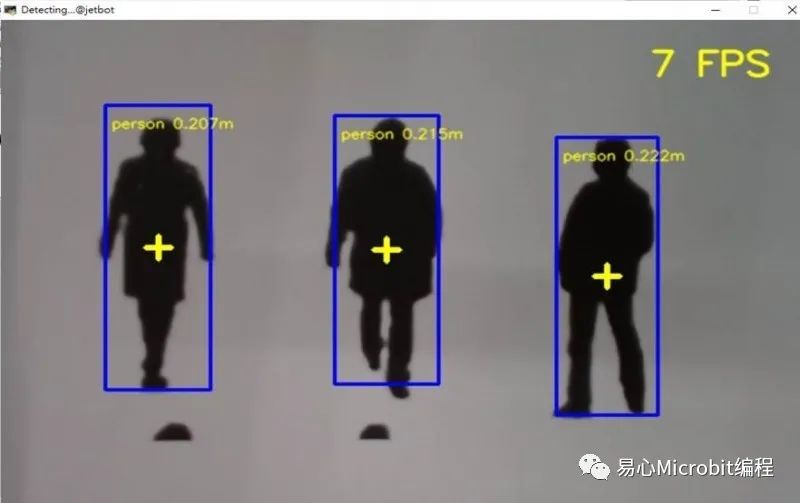
執(zhí)行結(jié)果如下:

5.或指定其他預(yù)訓(xùn)練神經(jīng)網(wǎng)絡(luò)模型,請執(zhí)行以下指令(本文例為pednet模型):
python3detectnet_realsense.py --network=pednet

編輯:黃飛
?





















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論