本文提出了一種用于具有雙目視覺的自主機器人的三維語義場景感知的端到端流程。該流程包括實例分割、特征匹配和點集配準。首先,利用RGB圖像進行單視圖三維語義場景分割,將2D數據集中的常見對象類封裝為物體實例的點云。
2024-02-21 15:55:38 148
148 
的RGB-D物體識別及場景理解 報 告 人:黃凱奇 中科院自動化所 報告摘要:物體識別與場景理解一直是計算機視覺的重要研究內容。近十年來,基于RGB圖片的2D語義理解一直占據最主流的研究方向。由于
2017-03-22 17:16:00
3D圖像的主流技術有哪幾種?Bora傳感器的功能亮點是什么?
2021-05-28 06:37:34
7大主流單片機優缺點對比分析哪個好?
2021-11-02 08:27:01
我從英特爾 - RealSense-D400系列 - 數據表.pdf第94頁的圖紙中推測,深度傳感器的中心距攝像機右側(USB側)37.5毫米:根據經驗,我推斷深度圖焦點X在相機的臉后面約32mm
2018-12-05 10:52:34
LCD的接口有多種,分類很細。主要看LCD的驅動方式和控制方式,目前手機上的彩色LCD的連接方式一般有這么幾種:MCU模式,RGB模式,SPI模式,VSYNC模式,MDDI模式,DSI模式。MCU
2020-08-06 10:07:08
`RGB接口靜電放電防護方案描述:RGB 接口就是分三原色輸入的視頻接口,稱為色光三原色,分別為紅、綠、藍,使用加色法,直接通到我們的人眼,比如屏幕顯示。其數值為 R:0--255G、0--255
2017-04-21 14:40:57
`方案簡介使用CSU8RF2111制作的具備記憶功能RGB燈。通過紅外搖控控制RGB 燈,發出不同顏色的光。方案特點可在直流、交流電源下工作;可發出16種色彩光,4種色彩變化的光,并具備4 級亮度
2014-01-09 15:53:49
DL:主流深度學習框架多個方向PK比較
2018-12-26 11:10:18
主流CAN收發器性能對比分析哪個最好?
2021-05-20 06:14:37
主流寬帶電力載波芯片對比 主流寬帶電力載波芯片對比 特點INTELLON,200MbpsDS2,200Mbps  
2010-04-02 11:22:10
主流的三種RF方案及其優缺點對比分析RF IC的主要性能是什么?
2021-05-25 06:34:17
LCD的接口有多種,分類很細。主要看LCD的驅動方式和控制方式,目前手機上的彩色LCD的連接方式一般有這么幾種:MCU模式,RGB模式,SPI模式,VSYNC模式,MDDI模式,DSI模式。MCU
2020-10-09 09:57:36
Viewer的版本是v.2.16.0。相機D435無法正常工作。“rs2_create_device中的未知(info_list:0000014D8863C480,索引:0):無法初始化擴展控件
2018-10-30 11:30:35
相機包帶加厚肩帶 攝影包相機包電腦包減壓彈力單肩帶 背帶金屬扣
2023-03-28 13:03:52
Semiconductor)芯片的相機。它具有高的圖像穩定性、高傳輸能力和高抗干擾能力等特點。2、方案概述Ameya360 工業機器視覺相機主要由控制模塊(Control Block)、相機模塊(Camera Block
2018-04-08 17:10:23
DMA2D 可以將圖像從 (480*640) RGB565 縮放到 (480*800) RGB565 嗎?
2022-12-28 07:26:47
您好,我是一個學生,我在Unity的應用程序中使用SR300相機(面部跟蹤)。我買了一臺D435來取代我的舊相機,但這款新相機沒有“面部跟蹤”。所以我嘗試在我的系統中放入新的相機,或者向舊的sdk
2018-12-05 10:51:17
。如何在UPBoard上使用D435相機獲得30fps的速度?以上來自于谷歌翻譯以下為原文We have an UP Board, and a D435 camera. The D435 Camera
2018-11-16 11:22:11
目前我們想做一個產品,把USB的相機(相機需求單獨驅動)的數據在相機模塊端轉成以太網數據,通過以太網cable連接到電腦上,有幾個問題想請教:用哪顆芯片軟件端是否有成熟方案是否支持Win,Linux,嵌入式等多平臺速率多少?USB2.0還是能到3.0小白問題,先感謝大牛回答!
2022-09-29 08:16:09
散熱器,可支持7x24小時工業環境下工作。免費提供CV2880主芯片資料、軟件研發底層SDK、樣片和開發工具等,至于工業相機的上層具體內容如十字線等軟件應用功能需要用戶自行開發,目前支持的數家工業相機廠商成品早已量產上市,其性價比在目前主流相機方案中首屈一指。
2018-09-13 15:13:28
模型在HiSpark AI Camera上的性能表現,并與當下流行的幾種方案對比 4、實現基于HiSpark AI Camera的ADAS項目,并滿足以下功能:4.1、司機疲勞駕駛檢測4.2、自動休眠
2020-09-25 10:12:07
通信技術發展的日新月異,對深度覆蓋的要求越來越高.什么是TD-LTE深度覆蓋解決方案?這些方案有什么優勢?
2019-08-14 07:35:24
你好在我的應用中,我想跟蹤直徑在2-5毫米,相機距離最大0.8米的小球的位置。相機是否適合用于此目的,還是有更好的替代方案來解決我的問題?相機噪音有多大問題?我讀到了,那是400系列的問題。這種
2018-10-23 10:38:38
如何切實的保護開發的產品呢?當前主流方案有哪些?
2017-04-18 16:25:15
Python在國內逐漸崛起和被追捧的原因?用Python可以做什么?幾款主流的Python開發板對比分析哪個好?
2021-10-26 07:06:46
大家好,我想弄清楚哪個相機(realsense D415或realsense D435)在陽光下具有最佳性能,可在2到5米范圍內進行深度感知和物體識別。我已經閱讀了規格,但似乎intel D
2018-11-20 11:34:48
引導語:本文為“3D視覺創新應用(三維重建)競賽”作品集系列之一,該作品由來自深圳大學團隊完成,團隊成員:趙晨昊、張曼英、周制黔、郭...
2021-07-02 06:56:13
。MV-D1024E是基于CMOS的高幀頻系列相機,具有CAMERA-LINK接口。CAMERA-LINK是一種丁業應用的高速數據連接協議,可為CCD或CMOS等數字式相機與圖像采集系統間提供簡單、靈活的通信接口。
2019-10-31 07:02:32
的數字分析和處理。MV-D1024E是基于CMOS的高幀頻系列相機,具有CAMERA-LINK接口。CAMERA-LINK是一種丁業應用的高速數據連接協議,可為CCD或CMOS等數字式相機與圖像采集系統
2019-07-02 08:11:34
我從realsense查看器中獲取d435深度相機的數據,當我保存深度圖像的快照時,我在規格中得到8位(1-256)灰度圖像,據說相機給出了16位深度圖片。你知道我怎么能得到16位圖像?以上
2018-11-27 14:11:37
基于RGB-D相機與機械臂的三維重建無序抓取系統有哪些關鍵技術?如何去開發一款基于RGB-D相機與機械臂的三維重建無序抓取系統?基于RGB-D相機與機械臂的三維重建無序抓取系統是由哪些部分組成的?
2021-09-08 06:12:06
嗨,我買了一臺D435相機。我想要校準D435相機與其他設備的相對位置,所以我需要測量D435的RGB相機和深度相機之間的相對位置以便進一步完成工作。所以我想問這是否確實得到了一個確切的參數或方法
2018-11-27 14:16:59
軟件應用功能需要用戶自行開發,支持的數家視頻展臺廠商成品已經量產上市,其性價比在目前主流相機/展臺方案中首屈一指。
2016-11-02 10:03:22
你好,我正在使用librealsense 2.16.0.221和D430相機型號。我想知道,從我的應用程序來看,相機是否已經在使用中(例如,在RealSense Viewer內或其他應用程序中打開
2018-11-09 11:33:42
這里有人有通過WiFi訪問D415(或其他RealSense相機)的經驗嗎?在我必須使用2個或更多深度相機一起工作的場景中,UpBoard是唯一(或者最佳......)方式嗎?感謝您的任何想法,評論
2018-11-09 11:30:33
`數字對講機主流方案`
2015-11-24 11:16:09
有沒有辦法為D435創建深度pointcloud的邊界框?我正在使用ROS相機。以上來自于谷歌翻譯以下為原文Is there a way to create a bounding box
2018-11-20 11:27:16
如題,找全景360度工業相機方案商,電路開放的方案公司。不要PCBA模組
2016-10-21 10:18:01
嗨羅伯特,你能推薦一下嗎?合適的相機最小尺寸,H264壓縮由Raspberry Pi3連接和控制?適用于Raspberry Pi 3 B控制和相機命令的軟件?謝謝彼得以上來自于谷歌翻譯以下為原文Hi
2018-10-23 11:41:59
“嗨,很久以前我安裝了我的英特爾實感SDK以便使用D435相機。我看了一下”英特爾實感SDK 2.0的示例“。我非常關注”捕獲“和”保存技術“兩個例子,通過Visual Studio分析代碼。我
2018-10-18 14:13:50
請問現在CNC機床伺服電機主流的中高級控制芯片是那顆料?謝謝!
2020-05-07 09:42:37
目前,比較高端的車在主機主流芯片
2017-06-03 15:22:37
你好,我正在使用英特爾實感D435,當我拍照時,我總是在圖像的邊框上出現錯誤的信號,就像我附加到你這個案例的圖像一樣,在我用藍色環繞的部分。相機認為這些部件非常深,產生的點云非常糟糕,我總是需要手動
2018-10-16 14:57:57
嗨,我需要一臺可以獲得未壓縮/未處理RGB / IR流的相機。通過未經處理,我不是指原始拜耳,而是至少一個原始RGB流,其中自動圖像調整功能被禁用。(例如,自動快門,自動白平衡,自動增益,自動曝光
2018-10-29 14:25:11
D130S型3D相機采用主動式深度感知技術,它采用激光光源和MEMS微振鏡模組作為投影模組,將可編碼的條形結構光投射于物體之上,并由成像設備采集并傳輸給計算單元,生成點云圖像。即其原理為通過在成像
2022-01-29 13:40:52
700mm-2000mm工作距離內可快速精準實現物體的三維點云重建,且該相機內部集成計算單元,配合千兆網線,可同時輸出點云圖、RGB、深度圖、灰度圖四種數據流。亞毫米級深度精度(0.
2022-03-21 16:16:04
700mm-2000mm工作距離內可快速精準實現物體的三維點云重建,且該相機內部集成計算單元,配合千兆網線,可同時輸出點云圖、RGB、深度圖、灰度圖四種數據流。亞毫米級深度精度(0.
2022-06-15 14:44:13
吉系列工業面陣相機 經濟型工業面陣相機支持自動或手動調節增益、曝光時間等千兆網接口,無中繼情況下,最大傳輸距離可到 100m支持硬觸發、軟觸發以及自由運行模式應用于電子半導體、工廠自動化等領域
2023-09-20 14:59:08
主流防抖數碼相機大拼比
提及防抖數碼相機,大家已經并不陌生了,這個詞匯早在1994年就已經出現,下面我們先了解下防抖的有關信息。最早推出防抖
2009-12-18 16:39:15368 數碼相機與傳統相機的區別是什么?
數碼相機也叫數字式相機,英文全稱Digital Camera,簡稱DC。數碼相機是集光學、機械、電
2009-12-19 09:45:385626 主流數碼相機
2009-12-19 09:48:52481 引 言
高速數據采集系統可對相機采集得到的實時圖像進行傳輸、實時處理,同時實現視頻采集卡和計算機之間的通信。系統連接相機的接口用的是Camera Link接口,通過Camera L
2010-07-28 16:10:3110752 
Delphi教程調整圖片的RGB對比度,很好的Delphi的學習資料。
2016-03-16 14:55:34 4
4 camera
2017-01-31 21:18:190 針對傳統的顏色一深度(RGB-D)圖像物體識別的方法所存在的圖像特征學習不全面、特征編碼魯棒性不夠等問題,提出了基于核描述子局部約束線性編碼( KD-LLC)的RGB-D圖像物體識別方法。首先
2017-12-07 10:22:311 2. RGB-D是一種特殊的相機,它不僅能捕捉深度信息(D)還能捕捉圖像顏色(RGB)。而且它還能捕捉到和2D相機一樣的彩色圖像。大多數RGB-D傳感器是通過“結構光”或“飛行時間”進行工作。你可能
2018-08-31 09:59:268953 據外媒報道,微軟已申請了一項被稱為“深度多光譜”相機的專利。該專利有望用于未來的Surface設備上,包括Surface Duo和Neo。據介紹,微軟研發的這項多光譜相機在某些方面要勝過蘋果的TrueDepth相機。
2019-12-16 11:21:192373 3D相機的不同之處在于,它可以測量普通數碼相機無法測量的深度數據。所謂深度數據,就是像素到相機的距離。所以3D相機可以獲取四個值,分別是RGB值和深度信息,即RGB-D。
2020-09-24 12:40:1616279 RGB-D圖像其實是兩幅圖像。
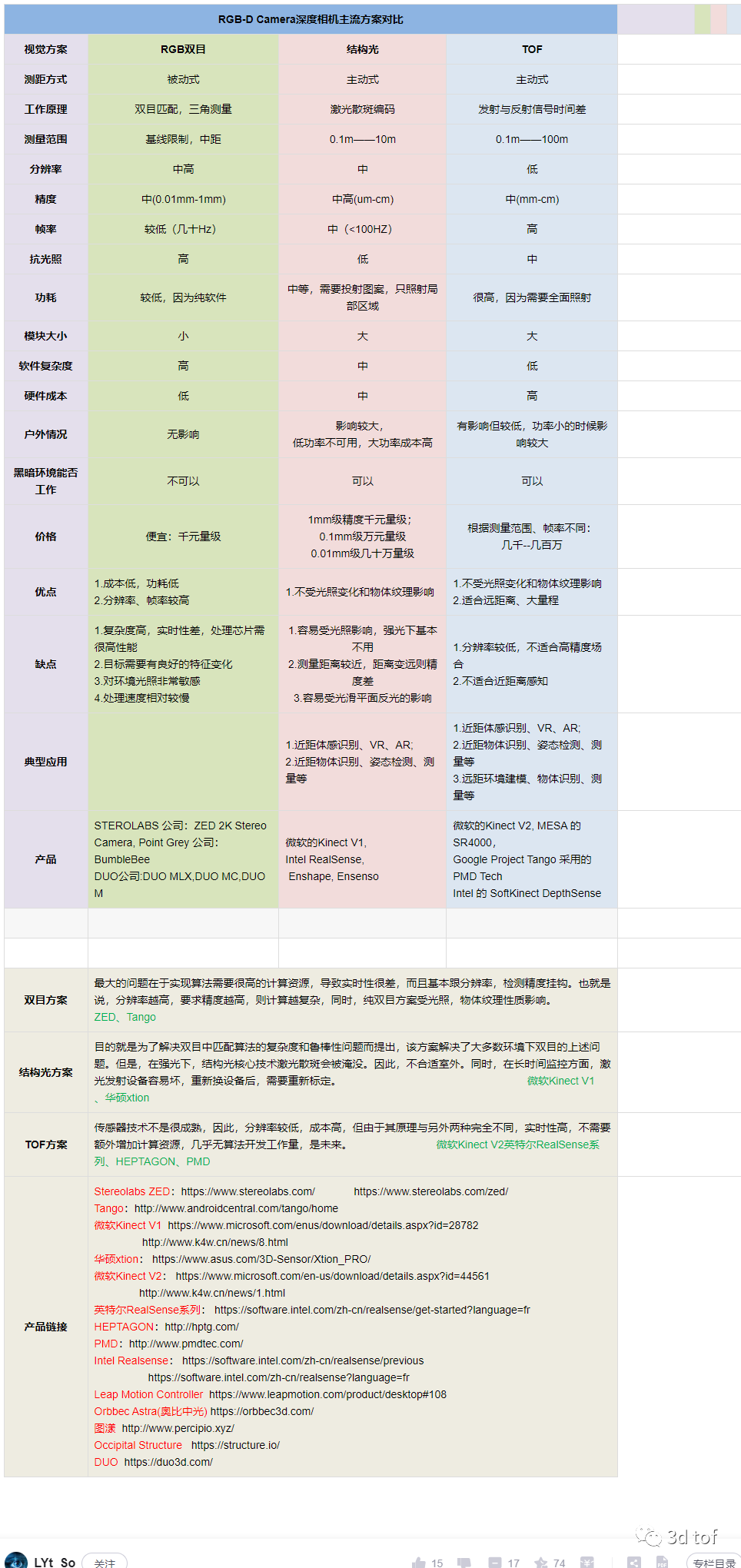
2020-11-01 11:46:4916564 上一期小編給大家介紹了TOF 與雙目結構光的對比,那在深度相機的應用方案種還有結構光的攝像方案。今天小編就跟大家來聊一聊結構光,順便也捋一捋這三者的對比。 結構光 結構光技術就是使用提前設計好的具有
2020-11-19 14:37:192893 RGB-D圖像顯著性檢測是指在傳統的2D圖像中附加深度信息從而提取顯著對象,但是現有的顯著性檢測模型,大多數只關注顯著物體本身,卻忽略了背景信息。因此,提岀了一個新穎的昰著性檢測模型,將深度信息同時
2021-04-13 11:31:250 的思想,僅消耗極少部分的計算資源就可以將各個傳感器融合起來,提高了系統精度。實驗結果表明,該方法可以將定位誤差抑制在10cm以內將偏轉角誤差抑制在1以內,徹底解決單一RGB-D攝像頭SLAM時跟蹤失敗的問題。
2021-04-25 14:47:5414 紅-綠-藍(RGB)相機被機器視覺制造商廣泛使用。這些相機很適合根據物體的形狀和顏色來表征物體。然而,由于只有三個可見波段可用,他們的識別能力是最小的。 高光譜相機可用于更高要求的應用,通過記錄
2022-04-25 10:17:483486 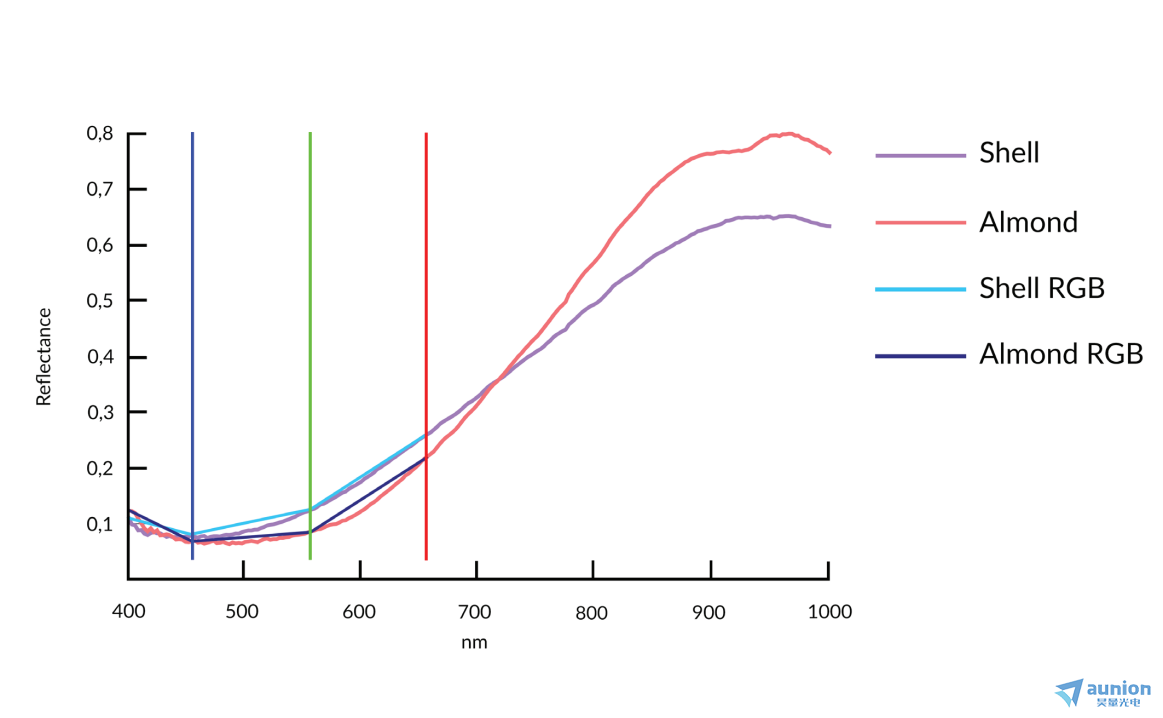
Lollipop 起便包含在 Android 中的框架 API,CameraX 是在 Camera2 之上運行的 Jetpack 支持庫,可供所有 Android 開發者使用。這些互補的解決方案可滿足 Android 相機生態系統的各種需求。
2022-06-21 11:21:42746 數據集對于使用深度學習訓練和測試3D分割算法至關重要。然而,私人收集和標注數據集既麻煩又昂貴,因為它需要領域專業知識、高質量的傳感器和處理設備。
2022-11-04 11:36:081082 隨著3D采集技術的快速發展,3D傳感器變得越來越可用且價格實惠,包括各種類型的3D掃描儀、激光雷達和RGB-D相機(如Kinect、RealSense和Apple深度相機)。
2022-12-09 09:21:361297 AMAZINGIC晶焱科技(KOYUELEC光與電子):IP Camera LAN Port ESD/Lightning保護方案及應用!
2022-12-30 15:09:341702 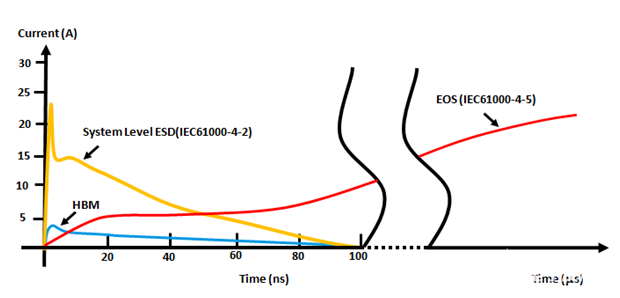
我們提出了GO-Surf,一種直接的特征網格優化方法,用于從RGB-D序列中準確和快速地重建表面。
2023-03-17 16:35:46446 輸入數據流不同。在基于RGB-D相機的三維重建中,輸入有深度信息和彩色信息,并且深度信息起主導作用,而在SLAM和SFM算法中輸入的是主要是彩色信息,個別工作也有結合深度信息。
2023-03-23 12:28:511007 當我們要記錄的信息更多時,一個字節就不夠了。 在RGB-D相機的深度圖中,記錄了各個像素與相機之間的距離。這個距離通常是以毫米為單位,而RGB-D 相機的量程通常在十幾米左右,超過了255。
2023-05-15 11:33:22414 
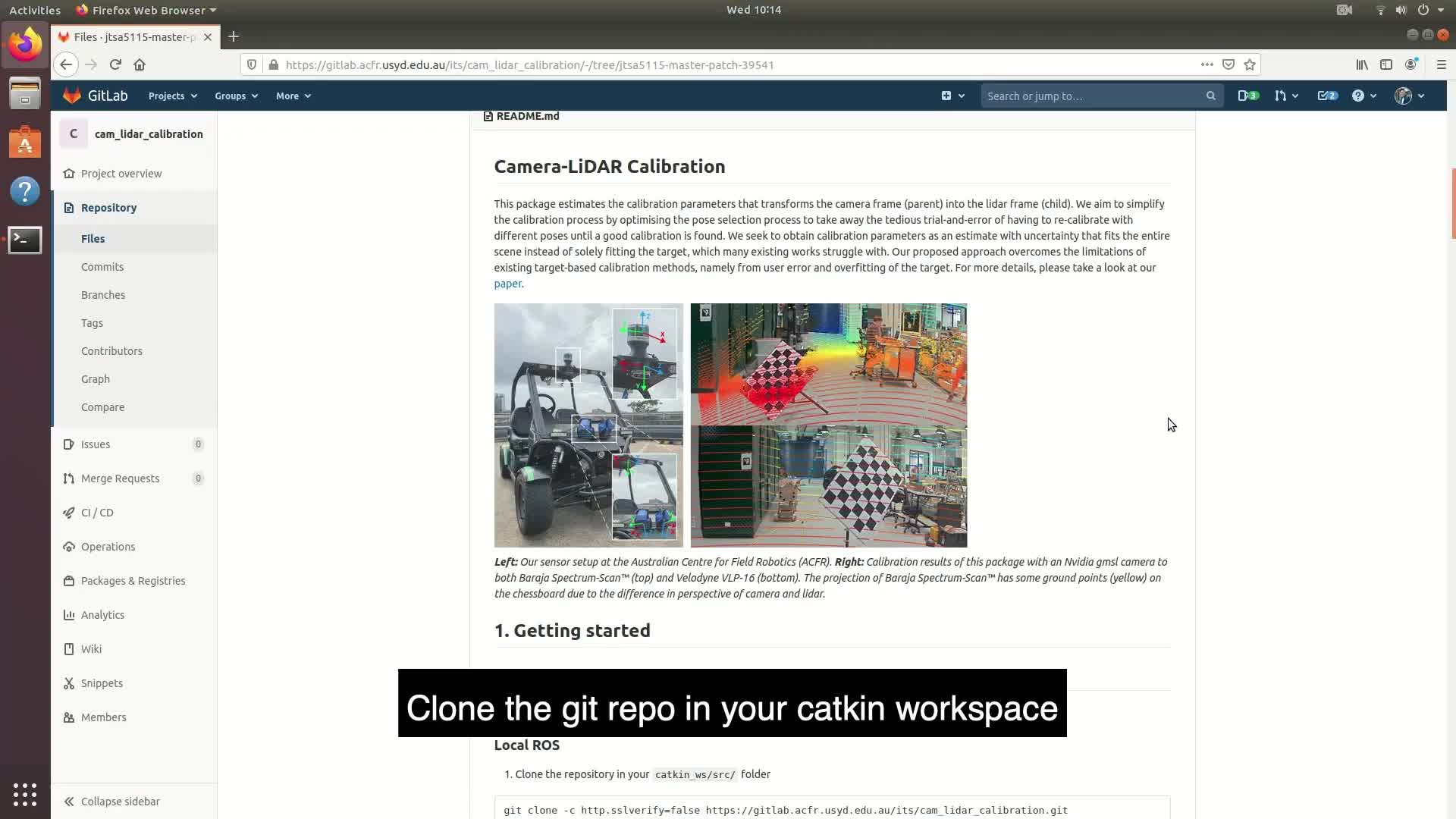
常見的消費級RGB-D相機具有粗略的內參和外參校準數據的,通常無法滿足許多機器人應用所需的精度要求。
2023-05-23 09:28:201000 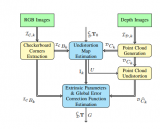
概述:本文重點討論自動駕駛中camera主流方案,主控soc上mipi_csi2搭配max96712的camera完整鏈路軟件框架和實現方案,主要討論了GMSL1和GMSL2兩種方案,
2023-06-06 10:01:381 維感科技于近期正式對外發售極具性價比的3D ToF RGB-D深度相機新品DS86/87,零售價格分別為4,199元與4,999元。
2023-06-16 09:40:26285 
虹科致力于為用戶提供最優的機器視覺解決方案。本文將用虹科的AI深度相機與英特爾的深度相機來做圖像的對比測試,那么它們有哪些性能差異呢?虹科深度相機HKOAK-DPro有兩個核心功能:紅外激光點陣
2023-04-20 09:34:06770 
高光譜相機(Hyperspectral Imaging, HSI)是一種具有非常高光譜分辨率的成像技術。它能夠捕獲到一個物體的大量光譜特征,從而對物體進行深入的物理或化學屬性分析。在燒傷深度檢測
2023-06-30 11:59:55363 
傳統的RGB彩色普通相機稱為2D相機,只能拍攝相機視角內的物體,沒有物體到相機的距離信息,只能憑感覺感知物體的遠近,沒有明確的數據。而RGB-D深度相機(又稱3D相機,其中D代表Depth為深度信息
2023-07-06 10:22:18497 
大多數現有的視覺SLAM方法嚴重依賴于靜態世界假設,在動態環境中很容易失效。本文提出了一個動態環境下的實時語義RGB-D SLAM系統,該系統能夠檢測已知和未知的運動物體。為了減少計算成本,其只對
2023-08-25 16:49:47274 
為托盤對接、料籠堆疊等高精對接應用打造的工業RGB-D相機。不僅提供卓越的RGB,點云融合3D數據,還搭載性能強大的算力平臺。可自動識別市面主流托盤、料籠,引導移動機器人完成作業。
2023-09-12 11:15:54427 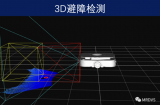
提出了一種基于RGB-D圖像序列的協同隱式神經同步定位與建圖(SLAM)系統,該系統由完整的前端和后端模塊組成,包括里程計、回環檢測、子圖融合和全局優化。
2023-11-29 10:35:18189 
隨著激光雷達傳感器(“光檢測和測距”的縮寫,有時稱為“激光掃描”,現在在一些最新的 iPhone 上可用)或 RGB-D 攝像頭(一種 RGB-D 攝像頭)的興起,3D 數據變得越來越廣泛。D 圖像
2024-01-03 10:32:10207 
視覺相機是機器智能/自動化的關鍵,NVIDIA Jetson支持多個合作伙伴的Camera,這些相機包括USB、以太網、MIPI等接口的相機。
2024-01-04 09:51:36921 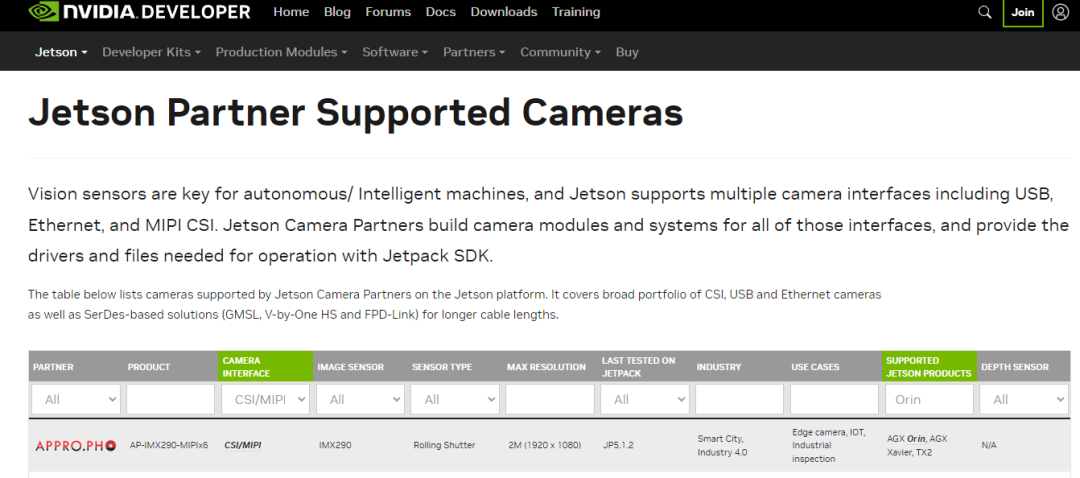
 電子發燒友App
電子發燒友App





 工商網監
湘ICP備 2023018690 號
工商網監
湘ICP備 2023018690 號




評論