 電子發燒友App
電子發燒友App


經典再回顧,本文介紹v1到v3。
如果你需要速度快的目標檢測器,那么 YOLO 系列的神經網絡模型實際上是當今的標準。
解決檢測問題還有很多其他優秀的模型,但我們不會在這篇綜述中涉及它們。
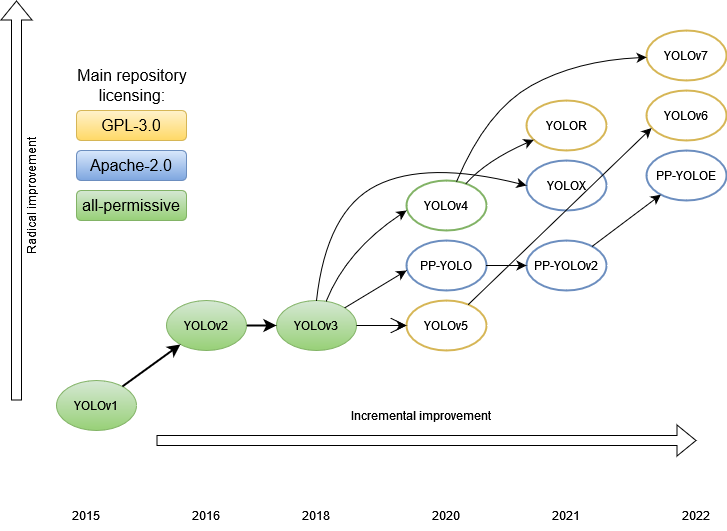
目前,已經寫了相當多的文章來分析 YOLO 各個版本的功能。本文的目的是對整個家族進行比較分析。我們想看看架構的演變,這樣我們就可以更好地了解檢測器是如何發展,哪些發展提高了性能,也許還可以想象事情的發展方向。
在YOLO出現之前,檢測圖像中目標的主要方法是使用各種大小的滑動窗口按順序穿過原始圖像的各個部分,以便分類器給出圖像的哪個部分包含哪個目標。這種方法是合乎邏輯的,但非常慢。
一段時間之后,出現了一個特殊的部分,它暴露了感興趣的區域 —— 一些假設,圖像上可能有有趣的東西。但是這些感興趣區域還是太多,有數千個。最快的算法,Faster R-CNN,平均在0.2秒內處理一張圖片,每秒5幀。總的來說,在出現一種全新的方法之前,速度不容樂觀。
有什么新奇之處?
在以前的方法中,原始圖像的每個像素可以被神經網絡處理數百甚至數千次。每次這些像素都通過相同的神經網絡傳遞,經過相同的計算。是否可以做一些事情以免重復相同的計算?
事實證明,這是可能的。但為此,我們不得不稍微重新表述問題。如果說以前它是一個分類任務,那么現在它變成了一個回歸任務。
YOLO aka YOLOv1
讓我們考慮第一個 YOLO 模型,也稱為 YOLOv1。
作者
Joseph Redmon, Santosh Divvala, Ross Girshick, Ali Farhadi
主要論文
“You Only Look Once: Unified, Real-Time Object Detection”, publication date 2015/06
性能比較
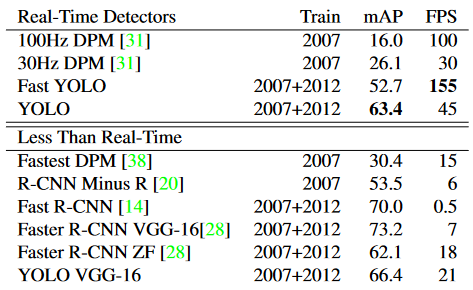
Pascal VOC 2007上的實時系統。YOLO是有記錄以來最快的Pascal VOC檢測檢測器,其準確性仍然是任何其他實時檢測器的兩倍。
結構
在結構上,YOLO 模型由以下部分組成:
input ― 輸入圖像被饋送到的輸入層
backbone — 輸入圖像以特征形式編碼的部分。
neck — 這是模型的其他部分,用于處理按特征編碼的圖像
head — 生成模型預測的一個或多個輸出層。
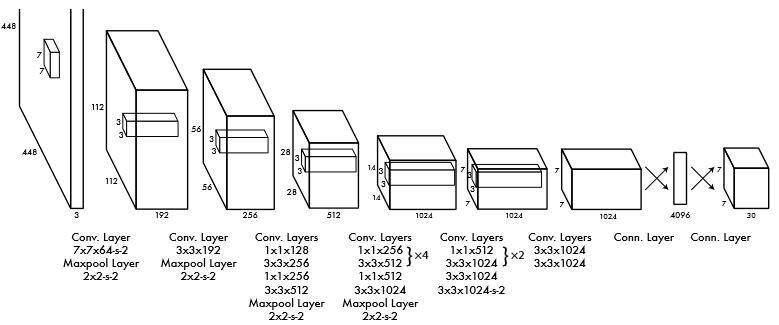
該網絡的第一個版本基于GoogLeNet的架構。卷積層接MaxPool層級聯,最后以兩個全連接層的級聯作為結束。
此外,作者訓練了Fast YOLO架構的更快版本,包含更少的卷積層(9而不是24)。兩個模型的輸入分辨率均為 448x448,但網絡主要部分的預訓練通過分辨率為 224x224 的分類器訓練。
在此結構中,原始圖片被劃分為 S x S 單元格(在原始 7 x 7 中),每個單元格預測 B 個邊界框,這些 bbox 中存在目標的置信度,以及 C 類的概率。每條邊的單元格數是奇數,因此圖像的中心有一個單元格。這比偶數具有優勢,因為照片的中心通常有一個主要目標,在這種情況下,主要的預測是在中心單元格中進行的。在區域數量為偶數的情況下,中心可能位于四個中央區域中的某個位置,這降低了網絡的置信水平。
置信度值表示模型對給定 bbox 包含某個目標的置信度,以及 bbox 預測其位置的準確度。事實上,這是IoU存在物體概率的乘積。如果單元格中沒有目標,則置信度為零。
每個 bbox 由 5 個數字組成:x、y、w、h 和置信度。(x, y)為單元格內 bbox 中心的坐標,w 和 h為 bbox相對于整個圖片尺寸的歸一化的寬度和高度,即歸一化從 0 到 1 的值。置信度是預測的 bbox 和GT框之間的 IoU。每個單元格還預測目標類的 C 個條件概率。每個單元格僅預測一組類別,而不考慮 bbox的數量。
因此,在一次前向中,預測了 S×S×B個包圍框。他們中的大多數框的置信度都很低,但是,通過設置一定的閾值,我們可以去除其中的很大一部分。但最重要的是,(與競爭對手相比)檢測率提高了幾個數量級。這是非常合乎邏輯的,因為所有類別的所有 bbox 現在只需一次預測。對于不同的實現,原始文章給出了從 45 到 155 的FPS。盡管與以前的算法相比,mAP的準確性仍然有所下降,但在某些問題中,實時檢測更為重要。
得到檢測框
由于與物體中心相鄰的單元格也可以產生bbox,從而導致框過多,因此有必要選擇其中最好的。為此,使用NMS技術,其工作原理如下。此類的所有 bbox,置信度低于給定閾值的那些將被丟棄。對于其余部分,執行IoU的成對比較過程。如果兩個框的 IoU > 0.5,則丟棄置信度較低的框。否則,兩個框都會保留在列表中。因此,類似的框被抑制了。
損失函數是組合的,具有以下形式:
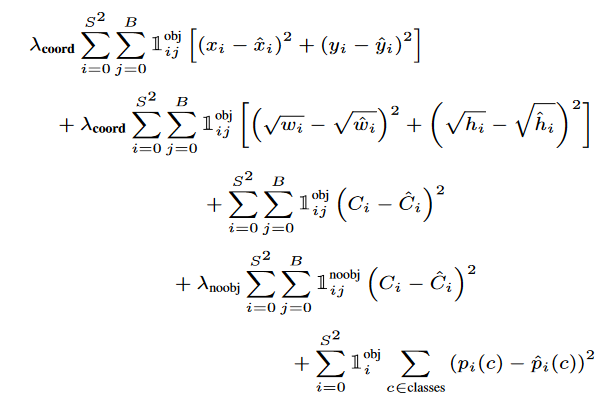
第一項是目標中心坐標的損失,第二項是框尺寸的損失,第三項是目標的類損失,如果目標不存在,則第四項是類的損失,第五項是在框中找到某個目標的概率。
需要 lambda 系數來防止置信度變為零,因為大多數單元格中沒有目標。1(obj,i)?表示的中心是否出現在單元格 i 中,1(obj,i,j)?表示單元格 i 中的第 j 個 bbox 負責此預測。
優勢
高速
比當時的競爭對手更好的泛化能力,在另一個領域進行測試(訓練是在ImageNet上進行的)顯示出更好的性能。
圖像背景部分的誤報更少。
局限性
每個單元格 2 個 bbox 和一個類目標的限制。這意味著一堆小物體的識別度較低。
原始圖像的幾個連續下采樣導致精度不高。
損失的設計方式是,它對大框和小框的錯誤具有同樣懲罰。作者試圖通過取尺寸大小的根來補償這種影響,但這并沒有完全消除這種影響。
YOLOv2 / YOLO9000
作者
Joseph Redmon, Ali Farhadi
主要論文
“YOLO9000: Better, Faster, Stronger”, publication date 2016/12
性能比較
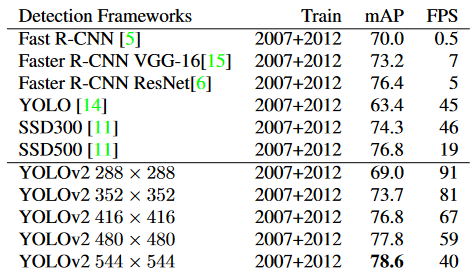
Pascal VOC 2007的檢測框架。YOLOv2 比以前的檢測方法更快、更準確。它還可以以不同的分辨率運行,以便在速度和準確性之間輕松權衡。每個 YOLOv2 條目實際上是具有相同權重的相同訓練模型,只是以不同的大小進行評估。所有計時信息均在 Geforce GTX Titan X 上測試。
結構特點
作者對模型的第一個版本進行了一些改進。
刪除了 dropout,并在所有卷積層中添加了BN。
預訓練為分辨率為 448x448 的分類器(YOLOv1 分辨率為 224x224),然后將最終網絡縮小到 416x416 輸入,以產生奇數個 13x13 單元。
刪除了全連接層。相反,他們開始使用全卷積和錨框來預測bbox(如Faster RCNN)。這樣可以減少空間信息的丟失(就像在 v1 中的全連接層中一樣)。
刪除了一個最大池化以增加特征的細節(分辨率)。在 v1 中,每張圖片只有 98 個 bbox,使用 V2 中的錨點,結果有超過 1000 個 bbox,而 mAP 略有下降,但召回率顯著增加,這使得提高整體準確性成為可能。
維度先驗。bbox的大小和位置不是像FasterRCNN那樣隨機手動選擇的,而是通過k-means聚類自動選擇的。盡管在小bbox上使用具有歐氏距離的標準k均值,但檢測誤差更高,因此對于k均值,選擇了另一個距離度量,1 - IoU(box,質心)。選擇5個作為分組數目的折衷方案。測試表明,對于以這種方式選擇的 5 個質心,平均 IoU 與 9 個錨點大致相同。
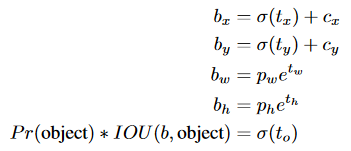
直接位置預測。最初,對于錨,與確定中心(x,y)坐標相關的網絡訓練存在不穩定性:由于網絡權重是隨機初始化的,并且坐標預測是線性的,大小是沒有限制的。因此,我們沒有預測相對于錨中心的偏移量,其中系數的正確范圍是 [-1,1],而是決定預測 bbox 相對于單元格中心的偏移,范圍 [0,1],并使用 sigmoid 來限制它。網絡為每個單元格預測 5 個 bbox,每個 bbox 5 個數字:tx、ty、tw、th、to。bbox 的預測參數計算如下:
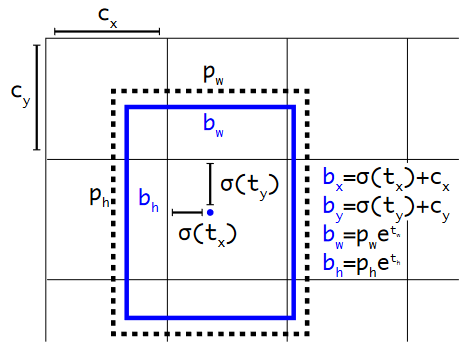
具有維度先驗和位置預測的邊界框。我們將框的寬度和高度預測為聚類質心的偏移量。我們使用 sigmoid 函數預測框相對于中心坐標的偏移。
細粒度特征。特征映射現在為 13x13。
多尺度訓練。由于網絡是全卷積的,因此只需更改輸入圖像的分辨率即可動態更改其分辨率。為了提高網絡的魯棒性,其輸入分辨率每 10 批次更改一次。由于網絡縮小了 32 倍,因此輸入分辨率是從集合 {320, 352, ..., 608} 中選擇的。網絡的大小從 320x320 調整為 608x608。
加速。VGG-16作為v1的骨干,太重了,所以在第二個版本中使用了darknet-19:
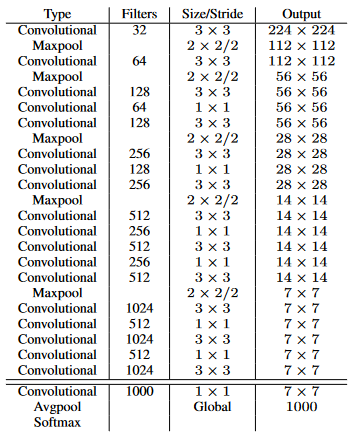
訓練分類器后,從網絡中刪除最后一個卷積層,添加三個具有 1024 個濾波器的 3x3 卷積層和一個具有檢測所需輸出數量的最終 1x1的卷積層。在 VOC 的情況下,它是 5 個 bbox,每個 bbox 有 5 個坐標,每個 bbox 有 20 個類,總共有 125 個濾波器。
分層分類。在 v1 中,這些類屬于同一類目標并且是互斥的,而在 v2 中引入了 WordNet 樹結構,這是一個有向圖。每個類別中的類都是互斥的,并且有自己的softmax。因此,例如,如果圖片顯示已知品種網絡的狗,則網絡將返回狗和特定品種的類。如果是網絡未知品種的狗,那么它只會返回狗的類別。因此,訓練了 YOLO9000,它是具有 3 個先驗的 v2,而不是 5 個和 9418 個目標類。
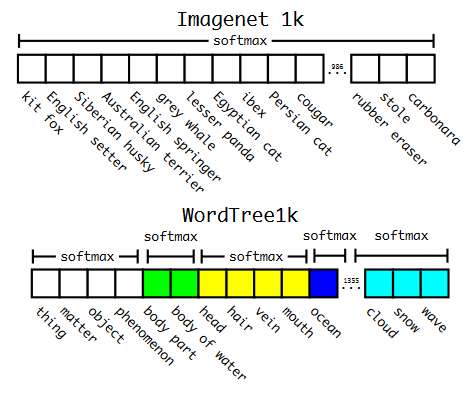
ImageNet vs WordTree上的預測。大多數 ImageNet 模型使用一個大的 softmax 來預測概率分布。使用WordTree,我們對共同下義詞執行多個softmax操作。

使用 WordTree 層次結構合并數據集。使用WordNet概念圖,我們構建了一個視覺概念的分層樹。然后,我們可以通過將數據集中的類映射到樹中的合成集來將數據集合并在一起。這是 WordTree 的簡化視圖,用于說明目的。
優勢
現在它不僅是速度方面的 SOTA,而且在 mAP 方面也是。
現在可以更好地檢測小物體。
YOLOv3
作者
Joseph Redmon, Ali Farhadi
主要論文
“YOLOv3: An Incremental Improvement”, publication date 2018/04
性能比較
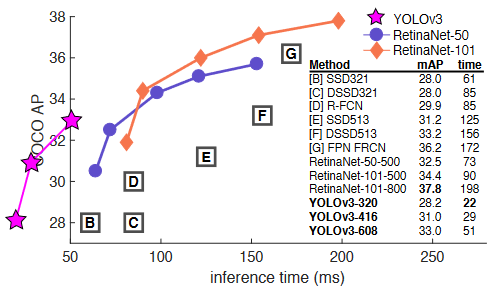
YOLOv3 的運行速度明顯快于具有相當性能的其他檢測方法。從M40或Titan X開始,它們基本上是相同的GPU。
結構
這是模型的增量更新,即沒有根本上更改,只有一組改進技巧。
每個 bbox 的置信度得分,即給定 bbox 中存在目標的概率,現在也使用 sigmoid 計算。
作者從多類分類切換到多標簽,所以我們擺脫了softmax,轉而支持二進制交叉熵。
在三個尺度上對 bbox 進行預測,輸出張量大小:N * N * (3 * (4 + 1 + num_classes))
作者使用k均值重新計算先驗框,并在三個尺度上得到了9個bbox。
新的、更深、更準確的骨干/特征提取器Darknet-53。
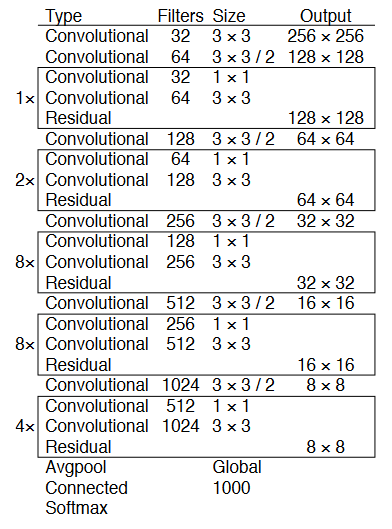
在準確性方面,它與 ResNet-152 相當,但由于更有效地使用 GPU,它所需的操作減少了近 1.5 倍,產生的 FPS 提高了 2 倍。
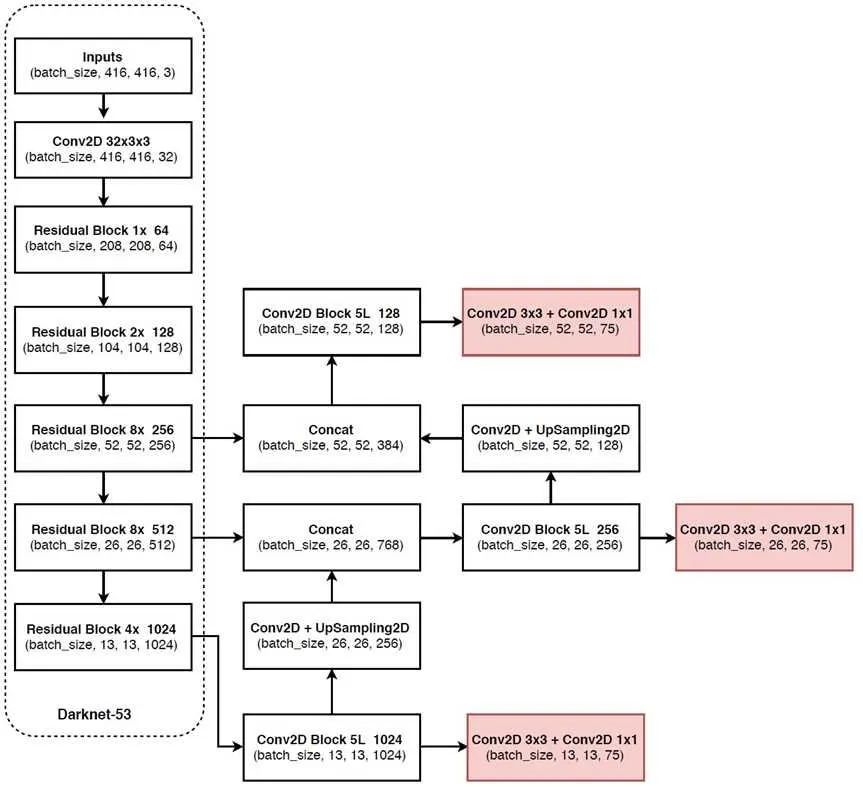
總體結構
不起作用的方法
BBOX 通過線性激活函數而不是logistic激活函數來協調位移預測。
focal loss — mAP 下降了 2 點。
用于確定GT的雙 IoU — 在 Faster R-CNN 中,IOU 有兩個閾值,通過該閾值確定正樣本或負樣本(>0.7 正值,0.3-0.7 忽略,<0.3 負樣本)
優勢
發布時的檢測精度高于競爭對手
發布時的檢測率高于競爭對手
編輯:黃飛
?









 工商網監
工商網監
評論