對比性圖像語言預訓練模型(CLIP)在近期展現(xiàn)出了強大的視覺領域遷移能力,可以在一個全新的下游數(shù)據(jù)集上進行 zero-shot 圖像識別。
2022-09-27 09:46:17 3518
3518 視覺語言導航(vision-language navigation, VLN)任務指的是引導智能體或機器人在真實三維場景中能理解自然語言命令并準確執(zhí)行。結合下面這張圖再形象、通俗一點解釋:假如智能
2019-03-05 09:38:444089 
數(shù)據(jù)驅(qū)動為核心的深度學習通過逐層抽象方式形成原始數(shù)據(jù)區(qū)別性表達,在自然語言、語音和計算機視覺等領域取得了顯著進展。但是,這一任務式、刺激式的學習機制依賴于大量標注數(shù)據(jù),如何形成解釋性強、數(shù)據(jù)依賴靈活
2017-03-22 17:16:00
大家好,我在National儀器上對CLIP(NI6587連接器Serdes)進行了更改,我得到一個錯誤編譯如下:LabVIEW FPGA:La compilationaéchouéàinssed
2018-10-19 14:36:19
【追蹤嫌犯的利器】定位技術原理解析(4)
2020-05-04 12:20:20
`深度無盤多配置一些經(jīng)驗心得 在論壇上看到有不少兄弟在討論說做無盤的多配置問題,看到有不少兄弟說喜歡做成單包多配置,也有說做成多包的比較好。總之大家都有自己的看法,也蠻有道理的。我今天就是談下自
2011-07-19 09:22:08
文章目錄1 簡介1.1 深度學習與傳統(tǒng)計算機視覺1.2 性能考量1.3 社區(qū)支持2 結論3 參考在計算機視覺領域中,不同的場景不同的應用程序需要不同的解決方案。在本文中,我們將快速回顧可用于在
2021-12-23 06:17:19
得初學者經(jīng)常卡在一些概念的理解上,讀論文似懂非懂,十分吃力。另一方面,即使有了簡單易用的深度學習框架,如果對深度學習常見概念和基本思路不了解,面對現(xiàn)實任務時不知道如何設計、診斷、及調(diào)試網(wǎng)絡,最終仍會
2019-07-21 13:00:00
深度搜索Linux操作系統(tǒng):系統(tǒng)構建和原理解析!比較好的一本Linux內(nèi)核書籍,從另一個角度去解釋!
2014-09-16 16:40:10
功能:視覺定位玻璃的位置和角度,給平面4軸機器人抓取1.附件是我自己用視覺助手做的驗證,很不穩(wěn)定2.相機是1200W,視野范圍是350*200,玻璃規(guī)格大小有很多,圖片是其中一款3.定位精度可以+1mm,吸盤抓取后放進輸送帶有經(jīng)驗的老師麻煩試下,有償幫助,謝
2021-10-05 17:15:58
解析深度學習:卷積神經(jīng)網(wǎng)絡原理與視覺實踐
2020-06-14 22:21:12
/ NMEA0183-C 的庫我把它遷移到我的碼云里了,方便大家下載遷移到碼云的NMEA0183-C我在KEIL C51中實現(xiàn)了GPS數(shù)據(jù)解析:...
2021-07-16 06:45:37
PDA、Source-Free DA上的應用。六、遷移學習前沿應用遷移學習在語義分割中的應用遷移學習在目標檢測中的應用遷移學習在行人重識別中的應用圖片與視頻風格遷移章節(jié)目標:掌握深度遷移學習在語義分割
2022-04-21 15:15:11
AUTOSAR架構深度解析本文轉(zhuǎn)載于:AUTOSAR架構深度解析AUTOSAR的分層式設計,用于支持完整的軟件和硬件模塊的獨立性(Independence),中間RTE(Runtime Environment)作為虛擬功能...
2021-07-28 07:02:13
AUTOSAR架構深度解析本文轉(zhuǎn)載于:AUTOSAR架構深度解析目錄AUTOSAR架構深度解析AUTOSAR分層結構及應用軟件層功能應用軟件層虛擬功能總線VFB及運行環(huán)境RTE基礎軟件層(BSW)層
2021-07-28 07:40:15
ArkTS語言基礎類庫是HarmonyOS系統(tǒng)上為應用開發(fā)者提供的常用基礎能力,主要包含能力如下圖所示。
圖1 ArkTS語言基礎類庫能力示意圖
提供[異步并發(fā)和多線程并發(fā)]的能力。
支持
2024-02-20 16:44:11
C語言深度解析,本資料來源于網(wǎng)絡,對C語言的學習有很大的幫助,有著較為深刻的解析,可能會對讀者有一定的幫助。
2023-09-28 07:00:01
C語言深度剖析[完整版].pdfC語言深度剖析[完整版].pdf (919.58 KB )
2019-03-19 05:11:41
C語言要點解析(含便于理解的備注)C語言要點解析(含便于理解的備注).pdf 2016-10-27 17:59 上傳 點擊文件名下載附件 1.08 MB, 下載次數(shù): 8
2018-07-19 09:15:26
CCD視覺紫外激光打標機,紫外激光打標機有了CCD視覺定位系統(tǒng)的加持在標記加工領域更是如虎添翼,能夠?qū)⒆贤饧す獯驑藱C的加工效率提升數(shù)倍,而且標記的位置更加精準。講到這里可能很多人還是不能理解什么是視覺
2022-03-08 14:20:33
為對幾何體的識別和抓放過程?利用邊緣提取、濾波去噪、圓心檢測等算法采用LabVIEW視覺模塊及其庫函數(shù)進行了圖像的預處理、特征提取以及中心點定位?研究結果表明基于LabVIEW的Tripod機器人系統(tǒng)能夠準確識別平臺幾何體的顏色和形狀可較為精確地定位幾何體中心滿足后續(xù)控制的要求
2019-06-01 06:00:00
、可計算的基礎;在確定了特征表示方式的基礎上,從文本大數(shù)據(jù)中學習能夠精確表達文本語義的特征是實現(xiàn)內(nèi)容理解的關鍵。 近年來,表示學習(representation?learning)或非監(jiān)督的特征學習
2018-12-18 11:58:56
,融合了網(wǎng)絡精準采集、自然語言理解、文本挖掘和語義搜索的研究成果,并針對互聯(lián)網(wǎng)內(nèi)容處理的全技術鏈條的共享開發(fā)平臺。包括大數(shù)據(jù)完整的技術鏈條:網(wǎng)絡采集、正文提取、中英文分詞、詞性標注、實體抽取、詞頻統(tǒng)計
2018-10-19 11:34:47
本帖最后由 eehome 于 2013-1-5 10:06 編輯
Zstack中串口操作的深度解析(一)歡迎研究ZigBee的朋友和我交流。。。
2012-08-12 21:11:29
教程,需要的朋友可以看看,作為參考!課程簡介:精選多年來名企在各地的Java筆試真題、面試經(jīng)驗課程目錄:第一節(jié) String Stringbuffer Stringbuilder 深度解析第二節(jié) 完美
2017-06-20 15:16:08
的網(wǎng)絡結構。當然,深度學習的方法用來檢測,也有自己的很多缺點。例如:數(shù)據(jù)量要求大,工業(yè)數(shù)據(jù)收集成本高。但是隨著數(shù)據(jù)增強技術,無監(jiān)督學習的不斷進步,在某些應用場景上,這些缺點漸漸被隱藏了。例如學術界正在研究
2021-05-10 22:33:46
申請理由:無人機光流視覺定位算法驗證,開發(fā) 。項目描述:無人機光流視覺定位,采集CMOS圖像,通過光流法分析圖像運動來獲得當前的位置信息 !現(xiàn)在已經(jīng)在STM32上初步運行了光流算法,但有些吃力!想找一個好的圖像處理同臺來流暢的完成 圖像的解析!
2015-10-09 15:10:01
全球定位系統(tǒng)(GPS)來說很難精確定位,需要有新的信息來輔助精確定位。視覺圖像感知是一種很好的技術途徑。圖像處理除了需要對算法研究外,算法實現(xiàn)也很重要。公司正著力準備將國
2015-09-10 11:10:13
更多的自然語言處理研究人員和對大語言模型感興趣的讀者能夠快速了解大模型的理論基礎,并開展大模型實踐,復旦大學張奇教授團隊結合他們在自然語言處理領域的研究經(jīng)驗,以及分布式系統(tǒng)和并行計算的教學經(jīng)驗,在
2024-03-11 15:16:39
項目名稱:基于機器學習的視覺機械臂研究與設計試用計劃:申請理由本人在深度學習領域有四年開發(fā)經(jīng)驗,申請理由:基于視覺的機械臂伺服控制系統(tǒng),并根據(jù)計算機視覺相關的理論知識,構建了一個完整的對于機械臂
2019-09-23 15:39:37
不斷變化的,因此深度學習是人工智能AI的重要組成部分。可以說人腦視覺系統(tǒng)和神經(jīng)網(wǎng)絡。2、目標檢測、目標跟蹤、圖像增強、強化學習、模型壓縮、視頻理解、人臉技術、三維視覺、SLAM、GAN、GNN等。
2020-11-27 11:54:42
FPGA實現(xiàn)。易于適應新的神經(jīng)網(wǎng)絡結構深度學習是一個非常活躍的研究領域,每天都在設計新的 DNN。其中許多結合了現(xiàn)有的標準計算,但有些需要全新的計算方法。特別是在具有特殊結構的網(wǎng)絡難以在 GPU 上
2023-02-17 16:56:59
領域,包括機器學習、深度學習、數(shù)據(jù)挖掘、計算機視覺、自然語言處理和其他幾個學科。首先,人工智能涉及使計算機具有自我意識,利用計算機視覺、自然語言理解和模仿其他感官。其次,人工智能涉及模仿人類的認知功能
2022-03-22 11:19:16
缺點。例如:數(shù)據(jù)量要求大,工業(yè)數(shù)據(jù)收集成本高。但是隨著數(shù)據(jù)增強技術,無監(jiān)督學習的不斷進步,在某些應用場景上,這些缺點漸漸被隱藏了。例如學術界正在研究的,自動網(wǎng)絡結構設計,自動數(shù)據(jù)標注等等。所以作者認為
2020-08-10 10:38:12
其實就是計算機科學的一個分支,將來也是會成為人類社會基礎設施的一部分。現(xiàn)在我們邀請來百度深度學習研究院科學家,為大家分享人工智能視覺開發(fā)的經(jīng)驗。點擊報名直播觀看:http
2018-07-20 11:06:52
基于機器視覺的穴孔位置的定位研究是目前的研究熱點。2.機器視覺在棉花氮素營養(yǎng)診斷中的應用農(nóng)作物生長發(fā)育進程和產(chǎn)量形成受肥料影響很大,基于機器視覺的作物生長監(jiān)測與診斷技術是近地面遙感監(jiān)測的方法之一,其優(yōu)質(zhì)
2020-10-12 11:03:03
過來的實際物品進行比較。機器視覺引導在許多任務中都能夠?qū)崿F(xiàn)比人工定位高得多的速度和精度,比如將元件放入貨盤或從貨盤中拾取元件,對輸送帶上的元件進行包裝,對元件進行定位和對位,以便將其與其他部件裝配
2021-11-24 11:32:58
ABSTRACT1.基于深度學習的異常檢測的研究方法進行結構化和全面的概述2.回顧這些方法在各個領域這個中的應用情況,并評估他們的有效性。3.根據(jù)基本假設和采用的方法將最先進的深度異常檢測技術分為
2021-07-12 06:36:22
異常檢測的深度學習研究綜述原文:arXiv:1901.03407摘要異常檢測是一個重要的問題,在不同的研究領域和應用領域都得到了很好的研究。本文的研究目的有兩個:首先,我們對基于深度學習的異常檢測
2021-07-12 07:10:19
大家好,畢業(yè)設計做基于labview機器視覺的圖像定位系統(tǒng),打算調(diào)用筆記本的攝像頭進行圖像采集,再進行圖像處理,視覺模塊和采集模塊已經(jīng)下載了,可是不知道怎么采集圖像,求大家支招.
2017-03-31 14:54:31
方法遷移到行人分類中.在MIT行人數(shù)據(jù)庫上的實驗結果表明:該方法能有效地刻畫出行人的特征,提高行人分類的性能,在標記樣本少的情況下仍具有良好的分類效果,因此可應用于行人檢測中【關鍵詞】:行人檢測
2010-04-24 09:48:05
FPGA 上實現(xiàn)卷積神經(jīng)網(wǎng)絡 (CNN)。CNN 是一類深度神經(jīng)網(wǎng)絡,在處理大規(guī)模圖像識別任務以及與機器學習類似的其他問題方面已大獲成功。在當前案例中,針對在 FPGA 上實現(xiàn) CNN 做一個可行性研究
2019-06-19 07:24:41
馬上要進行機械視覺的學習。想問一下大佬們關于機械視覺,我要學習哪一門語言?c 還是Python 還是Java或者說是嵌入式。選哪一個?對以后機械視覺的課題研究幫助更大?在線等,很急
2019-04-15 15:30:38
可以在1米之內(nèi)。LED定位需要改造LED燈具,增加芯片,增加成本,紅外線只能視距傳播,穿透性極差也極易受燈光、煙霧等環(huán)境因素影響明顯。定位效果有限。 6、地磁和計算機視覺定位 目前這兩類產(chǎn)品大多
2020-08-11 08:00:28
針對移動機器人的局部視覺定位問題進行了研究。首先通過移動機器人視覺定位與目標跟蹤系統(tǒng)求出目標質(zhì)心特征點的位置時間序列, 然后在分析二次成像法獲取目標深度信息的缺陷的基礎上, 提出了一種獲取目標的空間
2019-06-01 08:00:00
電動輪椅,融合多種領域的研究,包括機器視覺,機器人導航和定位.模式識別,多傳感器融合及用戶接口等。目前美國、德國.日本、及中國等多個國家都在進行這方面的研究。
輪椅的安全導航,是智能輪椅要解決的中心
2023-09-25 07:13:35
、Source-Free DA上的應用。六、遷移學習前沿應用遷移學習在語義分割中的應用遷移學習在目標檢測中的應用遷移學習在行人重識別中的應用圖片與視頻風格遷移章節(jié)目標:掌握深度遷移學習在語義分割、目標檢測
2022-04-28 18:56:07
求 視覺定位-------旋轉(zhuǎn)中心的最佳算法,
2021-06-11 09:44:31
想要學習labview視覺定位,怎么建立坐標系,通過坐標系來定位抓取和放置功能
2019-04-11 13:22:58
的研發(fā)經(jīng)驗。在過去的工作中,他發(fā)表過論文十余篇,申請中國專利超過100項,其中已經(jīng)授權的有95項。他曾任職百度深度學習研究院,負責人臉識別方向,曾經(jīng)多次帶領團隊在主流的人臉檢測、人臉識別競賽上取得
2018-07-19 10:01:11
十、從頭到尾徹底理解傅里葉變換算法、上 十、從頭到尾徹底理解傅里葉變換算法、下 十一、從頭到尾徹底解析Hash表算法 十二、快速排序算法之所有版本的c/c++實現(xiàn) 十三、通過浙大上機復試
2018-10-23 14:31:12
Geiger 的研究主要集中在用于自動駕駛系統(tǒng)的三維視覺理解、分割、重建、材質(zhì)與動作估計等方面。他主導了自動駕駛領域著名數(shù)據(jù)集 KITTI 及多項自動駕駛計算機視覺任務的基準體系建設,KITTI 是目前最大的用于自動駕駛的計算機視覺公開數(shù)據(jù)集。
2020-07-30 06:49:20
視頻教程:Java常見面試題目深度解析!Java作為目前比較火的計算機語言之一,連續(xù)幾年蟬聯(lián)最受程序員歡迎的計算機語言榜首,因此每年新入職Java程序員也數(shù)不勝數(shù)。很多java程序員在學成之后,會面
2017-07-11 10:55:04
、定位、檢測等研究工作大多基于此數(shù)據(jù)集展開。Imagenet數(shù)據(jù)集文檔詳細,有專門的團隊維護,使用非常方便,在計算機視覺領域研究論文中應用非常廣,幾乎成為了目前深度學習圖像領域算法性能檢驗的“標準
2018-08-29 10:36:45
深度學習目前已成為發(fā)展最快、最令人興奮的機器學習領域之一。本文以計算機視覺的重要概念為線索,介紹深度學習在計算機視覺任務中的應用,包括網(wǎng)絡壓縮、細粒度圖像分類、看圖說話、視覺問答、圖像理解、紋理生成
2019-06-08 08:00:00
AI視野·今日CS.CV 計算機視覺論文速覽transformer、新模型、視覺語言模型、多模態(tài)、clip、視角合成
2021-08-31 08:46:46
,怎樣把我們的常識“灌”到AI系統(tǒng)中,是我們需要不斷細化來解決的問題途徑。 資源則是針對現(xiàn)在的研究對象資源的問題。無監(jiān)督學習、Zero-shot學習、Few-shot學習、元學習、遷移學習等方式,其實
2019-09-19 14:10:38
了無盤緩存軟件,而剛推出的深度無盤網(wǎng)吧系統(tǒng),以驚人的速度研發(fā)出了深度無盤緩存工具以及服務端自帶的IO讀緩存。 而本人一直對深度情有獨鐘,做為一名網(wǎng)吧維護員,深度出無盤后,一直在深入研究深度無盤網(wǎng)吧系統(tǒng)
2011-07-15 13:24:41
HarmonyOS頁面的分布式遷移和分布式文件的讀取當前,在不同的設備上遷移一個任務的操作通常十分復雜,比如路上在手機里寫了一半的郵件,回到家想切換到平板電腦更方便的處理;或者有時需要調(diào)用不同設備中
2022-03-25 16:59:38
基于一個可伸縮的、任務無關的系統(tǒng),OpenAI在一組包含不同的語言任務中獲得了最優(yōu)的實驗結果,方法是兩種現(xiàn)有理念的結合:遷移學習和無監(jiān)督的預訓練。
2018-06-13 18:00:325705 
對于機器翻譯、文本摘要、Q&A、文本分類等自然語言處理任務來說,深度學習的出現(xiàn)一遍遍刷新了state-of-the-art的模型性能記錄,給研究帶來諸多驚喜。但這些任務一般都有各自的度量基準,性能也只在一組標準數(shù)據(jù)集上測試。
2018-06-26 15:19:094233 新加坡國立大學在讀博士生趙健分享了“基于深度學習的任務圖像理解:人臉識別與人物解析”,介紹了他博士期間在這個領域的多個代表工作—DA-GAN、PIM和3D-PIM,ICCV 2017
2018-09-02 10:27:126003 現(xiàn)實中的自然語言處理面臨著多領域、多語種上的多種類型的任務,為每個任務都單獨進行數(shù)據(jù)標注是不大可行的,而遷移學習可以將學習的知識遷移到相關的場景下
2019-03-02 09:16:242885 嵌入式Linux與物聯(lián)網(wǎng)軟件開發(fā)——C語言內(nèi)核深度解析 C語言是嵌入式Linux領域的主要開發(fā)語言。對于學習嵌入式、單片機、Linux驅(qū)動開發(fā)等技術來說,C語言是必須要過的一關。C語言學習的特點是入門容易、深入理解難、精通更是難上加難。
2019-05-15 18:10:00 6
6 TensorFlow重磅推出一個全新的圖形工具TensorFlow Graphics,結合計算機圖形學和計算機視覺技術,以無監(jiān)督的方式解決復雜3D視覺任務。
2019-05-14 08:35:432309 機器視覺應用的照明的最重要的任務就是使需要被觀察的特征與需要被忽略的圖像特征之間產(chǎn)生最大的對比度,從而易于特征的區(qū)分。
2019-07-05 14:11:336145 近年來,由于深度學習、計算機視覺和自然語言處理等多學科領域的興趣激增,視覺和語言任務的橋接得到了顯著的發(fā)展。
2019-08-09 18:32:012380 
深度學習DL是機器學習中一種基于對數(shù)據(jù)進行表征學習的方法。深度學習DL有監(jiān)督和非監(jiān)督之分,都已經(jīng)得到廣泛的研究和應用。
2020-01-24 10:46:004734 這是一種為 3D 點云提出的無監(jiān)督膠囊架構,并且在 3D 點云重構、配準和無監(jiān)督分類方面優(yōu)于 SOTA 方法。 理解對象是計算機視覺的核心問題之一。傳統(tǒng)方法而言,理解對象任務可以依賴于大型帶注釋
2021-01-02 09:39:001863 在大規(guī)模標注的數(shù)據(jù)集上訓練深度模型不僅可以使手頭的任務表現(xiàn)良好,還可以使模型學習對于下游任務的有用特征形式。但是,我們是否可以在不使用如此昂貴且細粒度的標注數(shù)據(jù)的情況下獲得類似的特征表達能力呢?本文研究了使用噪聲標注(在這種情況下為圖像標題)的弱監(jiān)督預訓練。
2021-01-18 17:08:567582 
今年 1 月初,OpenAI 提出了一種通用視覺系統(tǒng) CLIP,其性能媲美 ResNet-50,并在一些有挑戰(zhàn)性的數(shù)據(jù)集上超過現(xiàn)有的視覺系統(tǒng)。給出一組以語言形式表述的類別,CLIP 能夠立即將一張圖像與其中某個類別進行匹配,而且它不像標準神經(jīng)網(wǎng)絡那樣需要針對這些類別的特定數(shù)據(jù)進行微調(diào)。
2021-03-22 17:13:482751 1.1 研究背景與任務定義 口語語言理解在任務型對話系統(tǒng)中扮演了一個非常重要的角色,其目的是識別出用戶的輸入文本中蘊含的意圖和提及到的槽位,一般被分為意圖識別和槽位填充兩個子任務[1]。以句子
2021-03-31 17:48:122145 
3D視覺定位指的是根據(jù)事先構建的3D模型及相關信息,計算取得某張圖像在拍攝時相機的位置和姿態(tài)。這是3D視覺的一項十分重要的技術,可以用來幫助實現(xiàn)人員定位與導航。
2021-04-03 14:39:008898 
引言 所謂3D視覺定位指的是根據(jù)事先構建的3D模型及相關信息,計算取得某張圖像在拍攝時相機的位置和姿態(tài)。這是3D視覺的一項十分重要的技術,可以用來幫助實現(xiàn)人員定位與導航。本博文將基于2019
2021-04-01 14:46:043857 
視覺問答與對話是人工智能領堿的重要硏究任務,是計算機視覺與自然語言處理交叉領域的代表性問題之一。視覺問答與對話任務要求機器根據(jù)指定的視覺圖像內(nèi)容,對單輪或多輪的自然語言問題進行作答。視覺問答與對話
2021-04-08 10:33:5610 口語理解(SLU是人機對話系統(tǒng)的重要部分,意圖識別作為口語理解的一個子任務,因其可以為限定領域的對話擴展領域而處于非常重要的地位。由于實際應用領域的對話系統(tǒng)需求増加,而需要開發(fā)的新領堿短時間內(nèi)又無法
2021-04-12 11:18:344 獲取運河過往船只的身份信息具有重要意義,快速、準確地定位船牌是實現(xiàn)船只身份自動化識別的首要任務。為提升對小尺度船牌的檢測性能,提岀一種結合深度特征遷移與融合的兩階段船牌定位算法。首先在船只檢測階段
2021-04-27 14:32:0231 基于特征和實例遷移的加權多任務聚類算法
2021-06-07 15:18:353 來自:復旦DISC 引言 本次分享我們將介紹三篇來自ACL2021的跨視覺語言模態(tài)的論文。這三篇文章分別介紹了如何在圖像描述任務中生成契合用戶意圖的圖像描述、端對端的視覺語言預訓練模型和如何生成包含
2021-10-13 10:48:272230 
白皮書《Transformer-LS:用于語言和視覺處理的高效 Transformer》中提出了“長-短 Transformer” (Transformer-LS),這是一種高效的 Transformer 架構,用于為語言和視覺任務模擬中具有線性復雜度的長序列。
2021-12-28 10:42:181309 本文由深蘭科學院撰寫,文章將為大家細致講解一種有效的無監(jiān)督深度表示器(Mix2Vec),該方法可將異構數(shù)據(jù)映射到統(tǒng)一的低維向量空間,避免混合異構數(shù)據(jù)相似度度量偏差問題。同時,該方法基于深度異構
2022-03-24 17:22:111270 目前,基于深度學習的視覺檢測在監(jiān)督學習方法的幫助下取得了很大的成功。然而,在實際工業(yè)場景中,缺陷樣本的稀缺性、注釋成本以及缺陷先驗知識的缺乏可能會導致基于監(jiān)督的方法失效。
2022-07-31 11:00:522303 視覺語言導航(VLN)是一個新興的研究領域,旨在構建一種可以用自然語言與人類交流并在真實的3D環(huán)境中導航的具身代理,與計算機視覺、自然語言處理和機器人等研究領域緊密關聯(lián)。
2022-09-20 14:30:302612 WeLM是一個百億級別的中文模型,能夠在零樣本以及少樣本的情境下完成包括對話-采訪、閱讀理解、翻譯、改寫、續(xù)寫、多語言閱讀理解在內(nèi)的多種NLP任務,并具備記憶能力、自我糾正和檢查能力。
2022-10-13 11:52:43436 高工機器人產(chǎn)業(yè)研究所(GGII)通過對機器視覺產(chǎn)業(yè)的梳理,結合宏觀數(shù)據(jù)和調(diào)研數(shù)據(jù)信息,秉承不悲觀、不樂觀,力求客觀的態(tài)度,深度解析2023年機器視覺行業(yè)的十大預測:
2022-11-29 11:18:352152 什么是晶振 晶振工作原理解析
2022-12-30 17:13:573727 
PaLI 使用單獨 “Image-and-text to text” 接口執(zhí)行很多圖像、語言以及 "圖像 + 語言" 任務。PaLI 的關鍵結構之一是重復使用大型單模態(tài) backbone 進行語言和視覺建模,以遷移現(xiàn)有能力并降低訓練成本。
2023-01-29 11:25:57665 傳統(tǒng)的多模態(tài)預訓練方法通常需要"大數(shù)據(jù)"+"大模型"的組合來同時學習視覺+語言的聯(lián)合特征。但是關注如何利用視覺+語言數(shù)據(jù)提升視覺任務(多模態(tài)->單模態(tài))上性能的工作并不多。本文旨在針對上述問題提出一種簡單高效的方法。
2023-02-13 13:44:05727 (如BERT\GPT等)的啟發(fā),視覺-語言預訓練 (Vision-Language Pre-training, VLP) 逐漸受到關注,成為如今 VL 任務的核心訓練范式。本文對 VLP 領域近期的綜述文章進行整理,回顧其最新的研究進展,旨在提供一份 VLP 入門指南。
2023-02-23 11:15:54608 從機器視覺的角度,由簡入繁從相機標定,平面物體檢測、有紋理物體、無紋理物體、深度學習、與任務/運動規(guī)劃結合等6個方面深度解析文章的標題。
2023-02-28 09:45:15530 ,實現(xiàn)高效的遷移學習。因此,PEFT 技術可以在提高模型效果的同時,大大縮短模型訓練時間和計算成本,讓更多人能夠參與到深度學習研究中來。
2023-06-02 12:41:45449 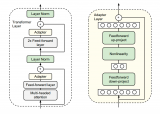
,本次展位號:W1館1368。
此次參展,維視智造將圍繞深度視覺系統(tǒng)解決方案、多相機并行檢測、超高速視覺檢測、視覺引導定位、超高精密測量、線掃高速檢測6大應用
2021-03-09 10:26:241073 
大型語言模型如 ChatGPT 的成功彰顯了海量數(shù)據(jù)在捕捉語言模式和知識方面的巨大潛力,這也推動了基于大量數(shù)據(jù)的視覺模型研究。在計算視覺領域,標注數(shù)據(jù)通常難以獲取,自監(jiān)督學習成為預訓練的主流方法
2023-07-24 16:55:03272 
Torchvision是基于Pytorch的視覺深度學習遷移學習訓練框架,當前支持的圖像分類、對象檢測、實例分割、語義分割、姿態(tài)評估模型的遷移學習訓練與評估。支持對數(shù)據(jù)集的合成、變換、增強等,此外還支持預訓練模型庫下載相關的模型,直接預測推理。
2023-09-22 09:49:51391 
://arxiv.org/pdf/2309.03576 代碼鏈接:? https://github.com/Haochen-Wang409/DropPos 今天介紹我們在 自監(jiān)督視覺預訓練 領域的一篇原創(chuàng)
2023-10-15 20:25:02301 
效果怎么樣呢?PaLI-3 在需要視覺定位文本理解和目標定位的任務上實現(xiàn)了新的 SOTA,包括 RefCOCO 數(shù)據(jù)集上的 8 個視覺定位文本理解任務和參考表達分割任務。PaLI-3 也在一系列分類視覺任務上有出色的表現(xiàn)。
2023-10-20 16:21:21397 
自我監(jiān)督學習的目的是獲得有利于下游任務的良好表現(xiàn)。主流的方法是使用對比學習來與訓練網(wǎng)絡。受CLIP成功的啟發(fā),利用CLIP的預訓練模型來完成下游任務引起了廣泛的關注。本文利用圖像文本預先訓練的CLIP知識來幫助理解3D場景。
2023-10-29 16:54:09664 
 電子發(fā)燒友App
電子發(fā)燒友App



 ?
?








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論