本節(jié)主要將近年來基于候選區(qū)域的目標(biāo)檢測算法分為五個部分進(jìn)行綜述,首先介紹了Faster R-CNN[14]框架的發(fā)展歷程,然后綜述了對Faster R-CNN算法的四個重要組成部分(特征提取網(wǎng)絡(luò)、ROI Pooling層、RPN、NMS算法)的改進(jìn)研究.
2023-01-09 10:52:32 861
861 ,基于深度學(xué)習(xí)的方法在標(biāo)準(zhǔn)的目標(biāo)檢測中取得了可喜的性能。水下目標(biāo)檢測仍具有以下幾點(diǎn)挑戰(zhàn):(1)水下場景的實(shí)際應(yīng)用中目標(biāo)通常很小,含有大量的小目標(biāo);(2)水下數(shù)據(jù)集和實(shí)際應(yīng)用中的圖像通常是模糊的,圖像中具有
2020-07-24 11:05:39
深度學(xué)習(xí)目標(biāo)檢測系列:faster RCNN實(shí)現(xiàn)附python源碼
2019-08-29 08:49:13
算法篇(PID詳解)
2020-05-19 10:30:59
檢測系統(tǒng)在低功耗、輕小型化等方面提出了更高的要求。因此,完成小目標(biāo)檢測任務(wù)不僅需要尋求合理的小目標(biāo)檢測算法,在實(shí)現(xiàn)時還需要考慮處理性能和體積功耗。
2019-08-09 07:07:03
RK3399 PRO npu 支持 faster RCNN 做全圖檢測么?能否提供一個例子或者設(shè)置方法?
2022-04-15 10:55:07
SVPWM的原理推導(dǎo)和控制算法詳解,不錯的資料,值得一看
2016-01-28 15:09:44
、并行處理、從目標(biāo)檢測算法嵌入式平臺的實(shí)現(xiàn)的設(shè)計(jì)要求出發(fā),基于深度學(xué)習(xí)的目標(biāo)檢測算法特點(diǎn),采用軟硬件協(xié)同設(shè)計(jì)思想進(jìn)行總體架構(gòu)設(shè)計(jì),使得可編程邏輯部分可進(jìn)行參數(shù)可配置以處理不同參數(shù)和結(jié)構(gòu)的網(wǎng)絡(luò)層,具有一定
2020-09-25 10:11:49
項(xiàng)目名稱:圖像目標(biāo)識別FPGA硬件加速試用計(jì)劃:申請理由 本人供職于一家AI公司,現(xiàn)在在使用FPGA硬件加速相關(guān)目標(biāo)檢測算法的端側(cè)實(shí)現(xiàn)(鑒黃/司機(jī)行為識別),公司已經(jīng)有非常成熟的軟件算法以及GPU
2019-01-09 14:51:09
不僅僅限于傳統(tǒng)RTL甚至是嵌入式LINUX 那一套,還需要對底層運(yùn)算單元模型進(jìn)行優(yōu)化(脈動陣列等算法),還需要能夠完成整個圖像算法的實(shí)現(xiàn)(Faster-RCNN等CV算法),RTL/C/C++進(jìn)行開發(fā)
2019-01-09 16:04:20
Girshick 在 RCNN 和 Fast RCNN 的基礎(chǔ)上于 2016 年提出的新模型,綜合性能更高,檢測速度更快。Tengine 版本的 Demo 對下面的圖片進(jìn)行識別:運(yùn)行 faster_rcnn 可執(zhí)行
2021-08-24 17:15:22
、學(xué)會使用imglabel軟件標(biāo)注圖片,弄清楚怎么樣標(biāo)注目標(biāo)3、學(xué)會利用labview調(diào)用tensorflow進(jìn)行ssd/faster-rcnn模型的訓(xùn)練4、學(xué)會利用labview實(shí)現(xiàn)觀察模型訓(xùn)練
2020-08-10 10:38:12
目標(biāo)跟蹤算法作為一種有著非常廣泛的應(yīng)用的算法,在航空航天、智能交通、智能設(shè)備等領(lǐng)域有著非常廣泛的應(yīng)用。本系列博客將教大家在410c開發(fā)板上基于linux操作系統(tǒng)環(huán)境,采用QT+Opencv來實(shí)現(xiàn)
2018-09-21 10:42:31
、物質(zhì)屬性變化和場景照明變化等等。 邊緣檢測是圖像處理和計(jì)算機(jī)視覺中,尤其是特征提取中的一個研究領(lǐng)域。一.算法原理:所謂邊緣是指其周圍像素灰度急劇變化的那些象素的集合,它是圖像最基本的特征。邊緣存在于
2018-09-21 11:45:44
,基于 RCNN 改進(jìn)的 Fast R-CNN、Faster R-CNN 等在檢 測速度和精度上獲得進(jìn)一步提升,逐漸成為了目標(biāo)檢測的首選方法。R-CNN 系列目標(biāo)檢測算法是典型的兩階段目標(biāo)檢測算法,第一階段
2023-03-06 13:55:27
如何運(yùn)行Faster RCNN的tensorflow代碼
2020-06-15 09:25:04
常見的電流采樣電路的檢測方案有哪幾種?永磁同步電機(jī)FOC控制算法的控制目標(biāo)是什么?
2021-10-08 09:36:38
兩通道DPCA動目標(biāo)檢測原理是什么?基于機(jī)載單通道SAR數(shù)據(jù)的地面運(yùn)動目標(biāo)檢測算法
2021-06-03 06:04:06
目標(biāo)檢測算法圖解:一文看懂RCNN系列算法
2019-08-29 09:50:56
和 靜止 目 標(biāo)對動 目 標(biāo)檢測 的千擾 。4. 2 經(jīng)典恒虛警 算法分析 圖 4-1 為雷達(dá)信 號處理流程 , 如 圖表示 回 波信 號經(jīng)處理后在距離 維和速度維的能量分布情況。 若 當(dāng) 前檢測
2018-02-28 09:19:59
和 靜止 目 標(biāo)對動 目 標(biāo)檢測 的千擾 。4. 2 經(jīng)典恒虛警 算法分析圖 4-1 為雷達(dá)信 號處理流程 , 如 圖表示 回 波信 號經(jīng)處理后在距離 維和速度維的能量分布情況。 若 當(dāng) 前檢測 單元 為
2018-03-29 10:53:32
提出了一種復(fù)雜背景下自動、實(shí)時地檢測和跟蹤非剛體目標(biāo)算法。該算法利用自適應(yīng)的背景減除方法,在復(fù)雜背景條件下提取出運(yùn)動目標(biāo);采用顏色直方圖模型為特征的均值平移
2008-12-13 02:04:57 6
6 摘要:討論了序列圖像的運(yùn)動目標(biāo)檢測算法,在傳統(tǒng)的光流場計(jì)算方法的基礎(chǔ)上,提出了基于幀間差閾值法的快速光流算法。整個算法簡單、有效,保證了序列圖像中運(yùn)動目標(biāo)跟
2009-01-09 12:06:2329 針對復(fù)雜環(huán)境下運(yùn)動目標(biāo)檢測提出一種基于像素分類的運(yùn)動目標(biāo)檢測算法。該算法通過亮度歸一化對圖像序列進(jìn)行預(yù)處理,用以降低光照變化造成的誤檢,根據(jù)場景中不同像素點(diǎn)的
2009-04-10 08:51:014 本文提出一種基于背景減除法和三幀差分法來進(jìn)行運(yùn)動目標(biāo)檢測的算法。首先運(yùn)用Surendra 背景更新算法建立運(yùn)動區(qū)域的背景模型,通過背景減除法確定運(yùn)動目標(biāo)區(qū)域,后與三幀差
2009-06-06 16:04:0062 序列圖像運(yùn)動目標(biāo)檢測的一種快速算法:研究了序列視頻圖像中運(yùn)動目標(biāo)的檢測與跟蹤快速算法.研究基于Kalman濾波理論的漸消記憶最小二乘法,用該方法重建背景圖像;采用圖像差
2009-10-26 11:23:2337 該文主要研究了基于Hurst 指數(shù)與可變步長LMS 算法相結(jié)合的分析方法在海雜波微弱目標(biāo)檢測中的應(yīng)用。一直以來,分形理論與統(tǒng)計(jì)理論是分別應(yīng)用到目標(biāo)檢測中的,該文將分形可變步
2010-02-09 11:29:4316 提出一種幀間雙差分法、自適應(yīng)光流、snake算法相結(jié)合的運(yùn)動目標(biāo)檢測方法。通過幀間雙差分法提取運(yùn)動區(qū)域,針對運(yùn)動區(qū)域進(jìn)行光流計(jì)算,對光流計(jì)算結(jié)果進(jìn)行C-均值聚類,最后用聚類
2010-03-01 13:56:3422 利用時差定位系統(tǒng)的定位誤差特性,基于蟻群優(yōu)化算法,提出了一種蟻群聚類檢測算法,在不需要先驗(yàn)信息的情況下,實(shí)現(xiàn)了對靜止目標(biāo)的檢測。實(shí)際數(shù)據(jù)測試結(jié)果表明蟻群聚類檢
2010-03-06 11:32:426 該文提出一種基于目標(biāo)檢測的SAR 圖像匹配算法。針對SAR 圖像的特點(diǎn),該算法先檢測SAR 圖像的強(qiáng)散射目標(biāo),接著計(jì)算各強(qiáng)散射目標(biāo)的質(zhì)心,對主、輔圖像的質(zhì)心點(diǎn)集合進(jìn)行Delaunay 三
2010-04-24 08:49:2023 由于實(shí)際場景的多樣性,目前常用的運(yùn)動目標(biāo)檢測算法都還存在一定程度的缺陷,因此本文提出了一種將幀差法和背景減法相結(jié)合的方法,實(shí)現(xiàn)快速精確地檢測和提取運(yùn)動目標(biāo)。實(shí)
2010-07-27 16:42:0713 摘要:在總結(jié)以往紅外項(xiàng)目實(shí)現(xiàn)的基礎(chǔ)上,著重學(xué)習(xí)研究了小波變換點(diǎn)目標(biāo)檢測技術(shù),并就其工程實(shí)現(xiàn)進(jìn)行了論證,嘗試將模極大值小波算法應(yīng)用到紅外點(diǎn)目標(biāo)檢測項(xiàng)目中. 關(guān)鍵詞:模極大;小波變換;點(diǎn)目標(biāo);多分辨率分析
2011-02-28 15:43:3187 本內(nèi)容提供了基于碼本模型的運(yùn)動目標(biāo)檢測算法
2011-05-19 10:54:0132 為了對強(qiáng)海雜波中的固定微弱目標(biāo)進(jìn)行檢測,論文提出了基于EMD和盒維數(shù)的目標(biāo)檢測算法。該算法首先采用EMD方法在時域內(nèi)提取海雜波的低頻分量,并計(jì)算低頻分量的盒維數(shù),
2011-05-19 15:39:010 為了設(shè)計(jì)一種實(shí)時高效、穩(wěn)定可靠的圖像目標(biāo)跟蹤系統(tǒng)平臺,避免因圖像邊緣提取效果差而引起跟蹤失敗,采用自適應(yīng)Canny邊緣檢測算法。該自適應(yīng)算法能夠很好的確定平滑參數(shù)以及高
2012-03-05 16:14:1338 針對幀差分法易產(chǎn)生空洞以及背景減法不能檢測出與背景灰度接近的目標(biāo)的問題,提出了一種將背景減和幀差法相結(jié)合的運(yùn)動目標(biāo)檢測算法。首先利用連續(xù)兩幀圖像進(jìn)行背景減法得到兩
2013-03-01 15:10:3548 提出了一種基于Surendra改進(jìn)的運(yùn)動目標(biāo)檢測算法,通過對背景更新系數(shù)的改進(jìn),獲取穩(wěn)定準(zhǔn)確的背景,再將背景幀與含運(yùn)動區(qū)域的圖像幀用差分運(yùn)算獲得運(yùn)動目標(biāo)圖像。實(shí)驗(yàn)結(jié)果表明,
2013-08-07 19:02:3531 基于改進(jìn)差分算法的運(yùn)動目標(biāo)檢測與跟蹤_王鎮(zhèn)西
2016-01-05 17:03:360 PID算法詳解
2016-12-17 20:48:1812 基于光流的運(yùn)動目標(biāo)檢測跟蹤快速算法_關(guān)興來
2017-03-16 15:42:481 相控陣PD雷達(dá)目標(biāo)檢測的實(shí)時空間濾波算法_鄧志象
2017-03-15 09:42:493 改進(jìn)的ViBe運(yùn)動目標(biāo)檢測算法_劉春
2017-03-19 11:41:390 基于多雷達(dá)的臨近空間目標(biāo)檢測前跟蹤算法_王睿
2017-03-19 19:19:353 針對復(fù)雜運(yùn)動背景中慢速小目標(biāo)檢測誤檢率高,實(shí)時性差等問題,提出了基于自適應(yīng)閡值分割的慢速小目標(biāo)檢測算法。首先計(jì)算連續(xù)兩幀圖像特征點(diǎn)的金字塔光流場,對光流場進(jìn)行濾波,獲取匹配特征點(diǎn)集合。然后對圖像運(yùn)動
2017-11-09 15:17:321 TLD算法是一種新穎的長期目標(biāo)跟蹤算法,針對算法中檢測器采用特征沒有充分考慮跟蹤過程中目標(biāo)的表觀、區(qū)域輪廓的變化及基于窗口掃描影響效率等問題,在TLD算法的基礎(chǔ)上,加入演化機(jī)理,基于水平集對其進(jìn)行
2017-11-21 11:51:549 視頻序列中運(yùn)動目標(biāo)的檢測是目標(biāo)識別、標(biāo)記和追蹤的重要組成部分,背景減除法是運(yùn)動目標(biāo)檢測中廣泛應(yīng)用的算法。針對光線變化、噪聲和局部運(yùn)動等影響運(yùn)動目標(biāo)檢測效果的問題,提出一種基于背景減除法的視頻序列運(yùn)動
2017-12-01 15:22:052 在集群環(huán)境中,入侵者攻擊特定目標(biāo)是提高攻擊效率一種常規(guī)手段,有針對性地調(diào)度計(jì)算資源可有效提高檢測效率。提出一種基于攻擊目標(biāo)預(yù)判的網(wǎng)絡(luò)入侵檢測系統(tǒng)( NIDS)的檢測頻率自調(diào)整算法DFSArIP,檢測
2017-12-12 13:51:240 針對圖像序列中運(yùn)動目標(biāo)檢測、跟蹤的難點(diǎn)問題,提出了一種實(shí)時運(yùn)動目標(biāo)檢測與跟蹤算法。該算法基于自適應(yīng)背景建模,獲取運(yùn)動目標(biāo)背景模型和前景圖像,從而實(shí)現(xiàn)運(yùn)動目標(biāo)檢測;通過建立運(yùn)動目標(biāo)的位置、大小、形狀
2017-12-12 17:35:353 針對經(jīng)典跟蹤一學(xué)習(xí)一檢測(TLD)目標(biāo)跟蹤算法由于檢測區(qū)域過大而導(dǎo)致的檢測時間過長及對相似目標(biāo)跟蹤處理效果不理想的問題,提出一種檢測區(qū)域可動態(tài)自適應(yīng)調(diào)整的方法-TLD-DO。該方法利用兩次
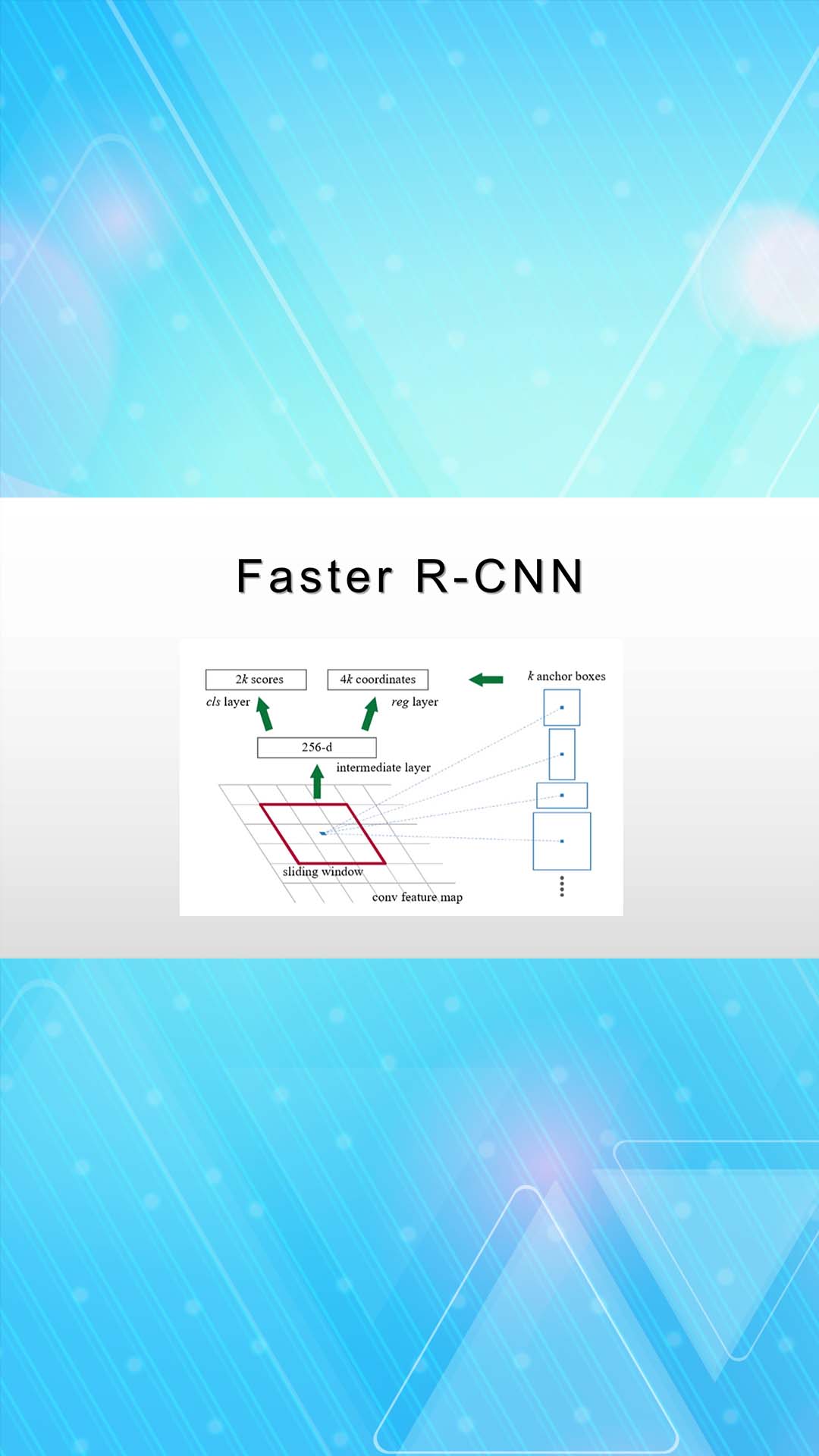
2018-01-03 16:33:180 在本篇文章中,公司的研究人員介紹了他們在研究過程中所使用的先進(jìn)目標(biāo)檢測工具Faster R-CNN,包括它的構(gòu)造及實(shí)現(xiàn)原理。
2018-01-27 11:49:0617813 
同時目標(biāo)檢測算法對于不常見的的比例或新的圖像分布缺乏一定的泛化能力。由于物體可能的方向和尺寸比例各不相同,算法有限的比例變化對于特殊目標(biāo)的檢測就會失效。為了解決這一問題,研究人員對數(shù)據(jù)進(jìn)行了旋轉(zhuǎn)和HSV的隨機(jī)增強(qiáng),是算法對于不同傳感器、大氣條件和光照條件具有更強(qiáng)的魯棒性。
2018-06-01 16:35:0811261 本文檔的主要內(nèi)容詳細(xì)介紹的是人工智能深度學(xué)習(xí)目標(biāo)檢測的詳細(xì)資料包括了:RCNN,F(xiàn)ast RCNN ,Faster RCNN ,YOLO,SSD
2018-08-08 17:55:1444 本Faster RCNN于2015發(fā)表,是精確率最高的物體檢測算法之一;但可惜它是先定位,再分類的兩階段模型,所以速度不高。
2018-10-04 16:36:002448 R-CNN又承繼于R-CNN,因此,為了能讓大家更好的理解基于CNN的目標(biāo)檢測方法,我們從R-CNN開始切入,一直介紹到Mask R-CNN。
2019-04-04 16:32:0712856 目標(biāo)檢測是一種多任務(wù)學(xué)習(xí)問題,包含目標(biāo)定位和目標(biāo)分類。當(dāng)前最佳的目標(biāo)檢測器(比如 Faster RCNN、Cascade R-CNN 和 Mask R-CNN)都依靠邊界框回歸來定位目標(biāo)。
2019-04-23 16:38:586103 
要知道 Faster R-CNN已經(jīng)是2015年提出的論文了,而YOLOv3發(fā)表出來也已經(jīng)一年多了。最近目標(biāo)檢測相關(guān)的論文,比較典型的有:SNIPER、CornerNet、ExtremeNet
2019-07-13 08:10:0014707 
但對于目標(biāo)檢測,語義分割,視頻場景等,輸入圖像尺寸比較大,而限于GPU顯卡的顯存限制,導(dǎo)致無法設(shè)置較大的 Batch Size,如 經(jīng)典的Faster-RCNN、Mask R-CNN 網(wǎng)絡(luò)中,由于圖像的分辨率較大,Batch Size 只能是 1 或 2.
2020-09-07 16:35:1110352 
本文首先介紹目標(biāo)檢測的任務(wù),然后介紹主流的目標(biāo)檢測算法或框架,重點(diǎn)為Faster R-CNN,SSD,YOLO三個檢測框架。本文內(nèi)容主要整理自網(wǎng)絡(luò)博客,用于普及性了解。 ps:由于之后可能會有一系列
2020-11-27 10:31:213675 目標(biāo)檢測這一基本任務(wù)仍然是非常具有挑戰(zhàn)性的課題,存在很大的提升潛力和空間。從RCNN到Fast RCNN,再到Faster RCNN,一直都有效率上的提升,那么如何深入了解目標(biāo)檢測,掌握模型框架的基本操作?
2020-12-28 11:46:481588 》,《fast RCNN算法詳解》。 思想 從RCNN到fast RCNN,再到本文的faster RCNN,目標(biāo)檢測的四個基本步驟(候選區(qū)域生成,特征提取,分類,位置精修)終于被統(tǒng)
2021-01-13 16:25:314324 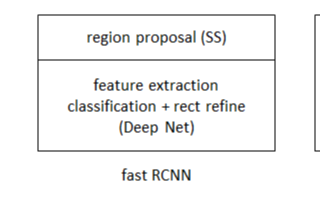
為實(shí)現(xiàn)對自然場景下小尺度人臉的準(zhǔn)確檢測,提出一種改進(jìn)的 Faster-RCNN模型。采用 Resnet-50提取卷積特征,對不同卷積層的特征圖進(jìn)行多尺度融合,同時將區(qū)域建議網(wǎng)絡(luò)產(chǎn)生的錨框由最初
2021-03-11 17:24:4226 為提高小尺度行人檢測的準(zhǔn)確性,提出一種基于改進(jìn) Faster r-CNN的目標(biāo)檢測方法。通過引入基于雙線性插值的對齊池化層,避免感興趣區(qū)域池化過程中兩次量化操作導(dǎo)致的位置偏差,同時設(shè)計(jì)基于級聯(lián)的多層
2021-03-23 14:52:203 為提升原始SSD算法的小目標(biāo)檢測精度及魯棒性,提出一種基于通道注意力機(jī)制的SSD目標(biāo)檢測算法。在原始SSD算法的基礎(chǔ)上對高層特征圖進(jìn)行全局池化操作,結(jié)合通道注意力機(jī)制增強(qiáng)高層特征圖的語義信息,并利用
2021-03-25 11:04:0620 設(shè)計(jì)新的Deformable- Scratch Net網(wǎng)絡(luò)模型,調(diào)整網(wǎng)絡(luò)結(jié)構(gòu)并融合淺層信息以提高對小目標(biāo)的檢測性能。實(shí)驗(yàn)結(jié)果表明,與Faster-RCNN等經(jīng)典網(wǎng)絡(luò)模型相比,該模型在 PASCALⅤOC數(shù)據(jù)集和自制遙感軍事目標(biāo)數(shù)據(jù)集上的檢測精度更高。
2021-04-02 11:35:5026 針對長期目標(biāo)跟蹤中存在的目標(biāo)遮擋、尺度變化和光照變化等干擾造成的跟蹤失敗冋題,提出一種融合尺度降維和重檢測的長期目標(biāo)跟蹤算法。該算法在長期相關(guān)性跟蹤算法的平移估計(jì)和尺度估計(jì)基礎(chǔ)上,采用主成分
2021-04-21 14:11:2112 整體框架 目標(biāo)檢測算法主要包括:【兩階段】目標(biāo)檢測算法、【多階段】目標(biāo)檢測算法、【單階段】目標(biāo)檢測算法 什么是兩階段目標(biāo)檢測算法,與單階段目標(biāo)檢測有什么區(qū)別? 兩階段目標(biāo)檢測算法因需要進(jìn)行兩階
2021-04-30 10:22:0410070 
為了使采摘機(jī)器人在收獲番茄時更加精準(zhǔn)地識別目標(biāo)果實(shí),采用改進(jìn)后的 Cascade rcnt網(wǎng)絡(luò)對溫室內(nèi)的番茄果實(shí)進(jìn)行目標(biāo)檢測。將 Cascade rann網(wǎng)絡(luò)中的非極大值抑制算法替換為Sof-NMS
2021-05-06 16:56:284 基于Ⅴ oxeinet三維目標(biāo)檢測網(wǎng)絡(luò)算法,將RCNN算法的思想從二維目標(biāo)檢測運(yùn)用到三維目標(biāo)檢測中。Voκ EIRCNN算法由兩級構(gòu)成,第一級的目標(biāo)是用區(qū)域提案網(wǎng)絡(luò)提取候選區(qū)域框信息,第二級的目標(biāo)是對第一
2021-05-08 16:35:2445 當(dāng)視頻監(jiān)控中存在動態(tài)背景干擾、鬼影現(xiàn)象和靜止目標(biāo)時,Viε算法的檢測性能較差。針對該冋題,提岀種改進(jìn)的ⅤiBe算法。通過otsu算法得到圖像的動態(tài)閾值,提髙算法在動態(tài)背景中的抗干擾能力,同時結(jié)合區(qū)域
2021-05-14 10:59:044 基于單激發(fā)探測器(SSD)的小目標(biāo)檢測算法實(shí)時性較差且檢測精度較低。為提高小目標(biāo)檢測精度和魯棒性提出一種結(jié)合改進(jìn)密集網(wǎng)絡(luò)和二次回歸的小目標(biāo)檢測算法。將SSD算法中骨干網(wǎng)絡(luò)由ⅤGG16替換為特征提取
2021-05-27 14:32:095 針對一階段目標(biāo)檢測算法在識別小目標(biāo)時無法兼顧精度與實(shí)時性的問題,提出一種基于多尺度融合單點(diǎn)多盒探測器(SSD)的小目標(biāo)檢測算法。以SSD和DSSD算法的網(wǎng)絡(luò)結(jié)構(gòu)為基礎(chǔ),設(shè)計(jì)融合模塊以實(shí)現(xiàn)
2021-05-27 16:32:239 深度神經(jīng)網(wǎng)絡(luò)在目標(biāo)檢測領(lǐng)域具有優(yōu)異的檢測性能,但其結(jié)構(gòu)復(fù)雜、計(jì)算量大,難以在嵌入式設(shè)備上進(jìn)行髙性能的實(shí)時目標(biāo)檢測。針對該問題,提出一種基于 YOLOV3的目標(biāo)檢測算法。采用半精度推理策略提高YOLO
2021-05-28 14:05:527 針對人工和傳統(tǒng)自動化算法檢測發(fā)動機(jī)零件表面缺陷中準(zhǔn)確率和效率低下,無法滿足智能制造需求問題提岀了一種基于深度學(xué)習(xí)的檢測算法。以 Faster r-CNN深度學(xué)習(xí)算法為算法框架,引入聚類理論來確定
2021-06-03 14:51:5419 YOLO是什么? 它是One-stage目標(biāo)檢測的代表,整個框架非常簡單。與RCNN算法不一樣,是以不同方式處理對象檢測。 YOLO算法的最大優(yōu)點(diǎn)就是速度極快,每秒可處理45幀,也能夠理解一般的對象
2021-06-10 15:45:093869 目標(biāo)檢測已經(jīng)有了長足的發(fā)展,總體來說根據(jù)階段個數(shù),可以劃分為Two-stage(Faster RCNN)、one-stage(SSD) 或者E2E(DETR)。根據(jù)是否基于anchor先驗(yàn),可以劃分
2021-06-21 17:40:112238 
基于并行Boosting算法的雷達(dá)目標(biāo)跟蹤檢測系統(tǒng)
2021-06-30 14:25:5431 基于Mask RCNN的濾袋開口檢測方法綜述
2021-07-01 15:36:2522 基于Grad-CAM與KL損失的SSD目標(biāo)檢測算法 來源:《電子學(xué)報(bào)》,作者侯慶山等 摘 要:?鑒于Single Shot Multibox Detector (SSD)算法對中小目標(biāo)檢測
2022-01-21 08:40:14786 一種改進(jìn)的高光譜圖像CEM目標(biāo)檢測算法 ? 來源:《?應(yīng)用物理》?,作者付銅銅等 摘要:? 約束能量最小化(Constrained Energy Minimization, CEM)目標(biāo)檢測算法
2022-03-05 15:47:03824 
針對通用目標(biāo)檢測方法在復(fù)雜環(huán)境下檢測小目標(biāo)時效果不佳、漏檢率高等問題,本文對SSD小目標(biāo)檢測算法進(jìn)行改進(jìn)。利用訓(xùn)練損失的反饋?zhàn)鳛榕袛鄺l件,結(jié)合數(shù)據(jù)增強(qiáng)提高模型對復(fù)雜環(huán)境的抗干擾能力,降低小目標(biāo)的漏檢
2022-04-02 16:14:403619
surface defect dataset,WSDD)并對其進(jìn)行數(shù)據(jù)標(biāo)注,進(jìn)而使用Faster RCNN和YOLOv5進(jìn)行目標(biāo)檢測,兩個模型的
評價指標(biāo)(Mean Average Precision ,MAP)均高于0. 517,表明本文采集的WSDD有效。然后,采用幾種傳統(tǒng)的數(shù)據(jù)
增強(qiáng)方法
2022-04-24 09:44:161 紅外單幀弱小目標(biāo)檢測算法主要通過圖像預(yù)處理突出小目標(biāo)同時抑制背景噪聲干擾,之后采用閾值分割提取疑似目標(biāo),最后根據(jù)特征信息進(jìn)行目標(biāo)確認(rèn)。
2022-08-04 17:20:094605 對象跟蹤問題一直是計(jì)算機(jī)視覺的熱點(diǎn)任務(wù)之一,簡單的可以分為單目標(biāo)跟蹤與多目標(biāo)跟蹤,最常見的目標(biāo)跟蹤算法都是基于檢測的跟蹤算法,首先發(fā)現(xiàn)然后標(biāo)記,好的跟蹤算法必須具備REID的能力。今天小編斗膽給大家推薦一個結(jié)合傳統(tǒng)算法跟深度學(xué)習(xí),特別好用的對象跟蹤算法框架DeepSort
2022-09-14 16:20:052190 R-CNN 算法在 2014 年提出,可以說是歷史性的算法,將深度學(xué)習(xí)應(yīng)用于目標(biāo)檢測領(lǐng)域,相較于之前的目標(biāo)檢測方法,提升多達(dá) 30% 以上
2022-10-31 10:08:051143 目標(biāo)檢測定義,識別圖片中有哪些物體以及物體的位置(坐標(biāo)位置)。其中,需要識別哪些物體是人為設(shè)定限制的,僅識別需要檢測的物體
2022-12-06 15:49:223833 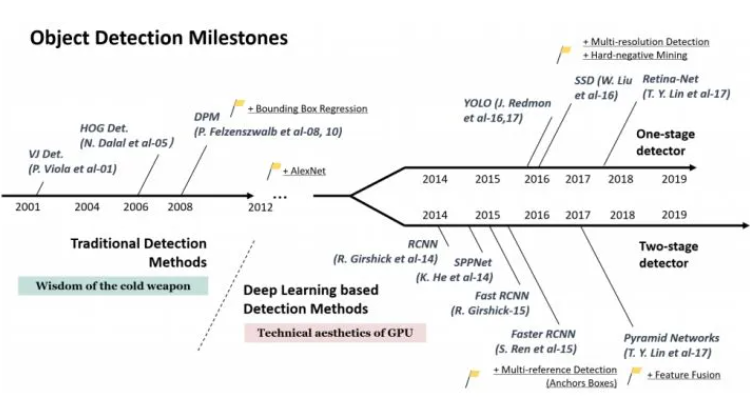
本文將討論目標(biāo)檢測的基本方法(窮盡搜索、R-CNN、Fast R-CNN和Faster R-CNN),并嘗試?yán)斫饷總€模型的技術(shù)細(xì)節(jié)。為了讓經(jīng)驗(yàn)水平各不相同的讀者都能夠理解,文章不會使用任何公式來進(jìn)行講解。
2023-01-05 16:27:20230 現(xiàn)在目標(biāo)檢測算法總結(jié)
1. 目標(biāo)檢測算法在機(jī)動車和行人檢測識別上應(yīng)用較多,在非機(jī)動車上應(yīng)用較少
2. 對于目標(biāo)檢測模型增強(qiáng)特征表示和引入上下文信息的改進(jìn)方法幾乎對任何場景和任何任務(wù)都是有利
2023-06-06 09:40:120 [源代碼]Python算法詳解[源代碼]Python算法詳解
2023-06-06 17:50:170 視覺感知算法的核心在于精準(zhǔn)實(shí)時地感知周圍環(huán)境,以便下游更好地進(jìn)行決策規(guī)劃,而 目標(biāo)檢測任務(wù) 就是視覺感知的 基礎(chǔ) 。不僅在自動駕駛領(lǐng)域,在機(jī)器人導(dǎo)航、工業(yè)檢測、視頻監(jiān)控等領(lǐng)域,目標(biāo)檢測都有著廣泛應(yīng)用
2023-06-25 10:37:48357 
導(dǎo)讀 本文主要講述:1.無Anchor的目標(biāo)檢測算法:YOLOv1,CenterNet,CornerNet的邊框回歸策略;2.有Anchor的目標(biāo)檢測算法:SSD,YOLOv2,Faster
2023-07-17 11:17:05558 
摘要:基于強(qiáng)化學(xué)習(xí)的目標(biāo)檢測算法在檢測過程中通常采用預(yù)定義搜索行為,其產(chǎn)生的候選區(qū)域形狀和尺寸變化單一,導(dǎo)致目標(biāo)檢測精確度較低。為此,在基于深度強(qiáng)化學(xué)習(xí)的視覺目標(biāo)檢測算法基礎(chǔ)上,提出聯(lián)合回歸與深度
2023-07-19 14:35:020 掌握基于Transformer的目標(biāo)檢測算法的思路和創(chuàng)新點(diǎn),一些Transformer論文涉及的新概念比較多,話術(shù)沒有那么通俗易懂,讀完論文仍然不理解算法的細(xì)節(jié)部分。
2023-08-16 10:51:26363 
寫在前面:本文將對 Nvidia BERT 推理解決方案 Faster Transformer 源碼進(jìn)行深度剖析,詳細(xì)分析作者的優(yōu)化意圖,并對源碼中的加速技巧進(jìn)行介紹,希望對讀者有所幫助。本文源碼
2023-09-08 10:20:33479 
在多數(shù)深度學(xué)習(xí)開發(fā)者的印象中Faster-RCNN與Mask-RCNN作為早期的RCNN系列網(wǎng)絡(luò)現(xiàn)在應(yīng)該是日薄西山,再也沒有什么值得留戀的地方,但是你卻會發(fā)現(xiàn)Pytorch無論哪個版本的torchvision都一直在支持Faster-RCNN與Mask-RCNN模型網(wǎng)絡(luò)的遷移學(xué)習(xí)訓(xùn)練。
2023-10-11 16:44:16324 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論